Изобретение относится к оптической технике и может быть использовано в оптическом приборостроении.
Известна система переменного увеличения, применяющаяся для имитации дальности до объекта [1]. Устройство содержит двигатель, соединенный через редуктор с валом цилиндрического кулачка с двумя рабочими поверхностями, с которыми контактируют каретки с расположенными на них компонентами оптической системы, потенциометр дальности, соединенный через редуктор с валом цилиндрического кулачка, выход потенциометра дальности соединен с входом блока управления, выход которого соединен с обмотками двигателя.
Наличие датчика положения кулачка и дополнительного редуктора в данном устройстве приводит к увеличению габаритов устройства, так же велико время возврата системы в исходное положение.
Прототипом предлагаемого изобретения является привод панкратического объектива [2].
Устройство содержит шаговый двигатель, связанный через редуктор и муфту с кулачком, выполненным в виде цилиндра с профилированными канавками на образующей, две каретки, кинематически связанные с кулачком, возвратную пружину, одним концом закрепленную на кулачке, а другим концом - на корпусе привода, блок управления скоростью шагового двигателя, выход которого соединен с четырьмя обмотками шагового двигателя, блок управления муфтой, первый вход которого соединен с входом блока управления скоростью шагового двигателя, а второй вход соединен с дополнительным выходом блока управления скоростью шагового двигателя, выход блока управления муфтой подсоединен к муфте.
Устройство работает следующим образом.
При подаче сигнала на вход блока управления скоростью шагового двигателя срабатывает муфта и замыкает кинематическую цепь редуктора. Блок управления скоростью шагового двигателя начинает выдавать сигналы на управление шаговым двигателем, который начинает вращаться с постоянной скоростью ω1, передавая вращение через редуктор на кулачок, которым с помощью поводков придает кареткам с оптическими компонентами поступательное перемещение. При этом возвратная пружина, одним концом закрепленная на кулачке, закручивается. По ходу программы скорость перемещения кареток падает и блок управления скоростью шагового двигателя дискретно уменьшает частоту вращения шагового двигателя (ω2, ω3, ...).
По завершении программы на второй вход блока управления муфтой подается сигнал на выключение муфты - кинематическая цепь редуктора размыкается и возвратная пружина устанавливает кулачок и каретки в исходное положение.
Комбинированное управление перемещением кареток за счет кулачкового механизма и изменения скорости вращения шагового двигателя позволяет оптимизировать угол подъема профиля кулачка во всем диапазоне угла поворота кулачка, реализовать большой диапазон скоростей перемещений оптических компонентов при минимальном диаметре кулачка. Применение шагового двигателя дает возможность точно отрабатывать угол поворота кулачка без датчика положения.
Размыкание кинематической цепи ″двигатель-редуктор-кулачок″ с помощью муфты позволяет значительно сократить время обратного хода, а также использовать данное устройство в приборах, в которых по окончании программы отключается питание.
Однако электромагнитная муфта, имеющая значительные массу и габариты по сравнению с самим панкратическим объективом, в совокупности с блоком управления муфтой увеличивает габариты устройства. Исключение из состава привода муфты приводит к улучшению массогабаритных характеристик устройства, но в этом случае в данной конструкции привода невозможно обеспечить высокую надежность возврата кулачка в исходное положение, особенно при низких температурах, так как при замкнутой кинематической цепи ″двигатель-редуктор-кулачок″ возвратной пружине необходимо дополнительно преодолевать момент сопротивления редуктора и остаточный момент шагового двигателя, имеющие значительные величины и большие температурные разбросы.
Задачей изобретения является снижение массогабаритных характеристик привода панкратического объектива.
Решение поставленной задачи достигается тем, что в приводе панкратического объектива, содержащем шаговый двигатель, связанный через редуктор с цилиндрическим кулачком с профилированными канавками на образующей, две каретки, кинематически связанные с кулачком, возвратную пружину, одним концом закрепленную на кулачке, а другим концом - на корпусе привода, блок управления, выход которого соединен с четырьмя обмотками шагового двигателя, каждая из кареток снабжена люфтовыбирающей пружиной, закрепленной своими концами на каретке и корпусе привода соответственно, при этом на оси вращения цилиндрического кулачка, имеющем выступ на торцевой поверхности, установлен ограничитель вращения кулачка, выполненный в виде кулачковых шайб, на первой из которых выполнен выступ, контактирующий с выступом цилиндрического кулачка, а последняя установлена с упором в металлорезиновый амортизатор, размещенный на корпусе привода.
Наличие люфтовыбирающих пружин обеспечивает оптимальный режим работы возвратной пружины на обратном ходе и надежный контакт поводков каретки с профилем кулачка. Установка металлорезинового амортизатора позволяет снизить ударные перегрузки на каретках, возникающие при движении кулачка в обратном направлении и в совокупности с ограничителем вращения кулачка обеспечивает надежную и с достаточной степенью точности фиксацию многооборотного кулачка при обратном ходе в исходном положениии.
С целью максимального эффективного использования указанного технического решения в конструкции применен редуктор с минимально возможным передаточным числом и уменьшено трение в кинематических парах ″поводок каретки - профиль кулачка″ за счет увеличения зазоров в профилированной канавке, что в совокупности с вышеизложенными признаками обеспечивает возврат привода в исходное положение с замкнутой кинематической цепью ″двигатель - редуктор - кулачок″ без значительного ужесточения параметров возвратной пружины и, как следствие, позволяет исключить из конструкции привода соединительную муфту и блок управления муфтой.
На чертеже представлена кинематическая схема предлагаемого привода панкратического объектива.
Привод панкратического объектива состоит из шагового двигателя 1, приводящего в движение через редуктор 2 цилиндрический кулачок с профилированными канавками на образующей 3, который кинематически связан с каретками 4, 5 и жестко соединен с одним из концов возвратной пружины 6, другой конец которой жестко закреплен на корпусе привода; ограничителя вращения кулачка кулачковыми шайбами 7, расположенного на оси вращения кулачка 3, первая кулачковая шайба которого контактирует с выступом на торце цилиндрического кулачка, а последняя кулачковая шайба своим выступом упирается в металлорезиновый амортизатор 8; люфтовыбиращих пружин 9, 10, каждая из которых одним концом закреплена на соответствующей каретке, а другим концом - на корпусе привода, блока управления 11, выход которого соединен с четырьмя обмотками шагового двигателя 1.
В предлагаемом устройстве может быть использован шаговый двигатель серии ДШР, цилиндрический кулачок, имеющий две рабочие поверхности, выполняется вращательным с роликовым толкателем, перемещение кареток может быть выполнено по цилиндрическим направляющим. В качестве люфтовыбирающих пружин применены цилиндрические пружины растяжения, а в качестве возвратной пружины кулачка - спиральная пружина.
Блок управления осуществляет регулирование скорости шагового двигателя по программе за счет изменения частоты импульсов напряжения, подаваемого на его обмотки.
Устройство работает следующим образом.
При подаче питания на блок управления 11 происходит запитка обмоток шагового двигателя 1. Шаговый двигатель 1 начинает вращаться и через редуктор 2 передавать движение цилиндрическому кулачку 3. При этом возвратная пружина 6 закручивается. Каретки 4, 5, контактируя через толкатели с рабочими поверхностями цилиндрического кулачка 3, перемещаются, при этом люфтовыбирающие пружины 9, 10 обеспечивают надежный контакт в кинематических парах кулачкового механизма. По ходу программы блок управления осуществляет регулирование скорости вращения шагового двигателя 1. По окончании программы снимается напряжение с блока управления 11 - обесточиваются обмотки шагового двигателя 1, начинает работать возвратная пружина 6. Цилиндрический кулачок 3 при обратном вращении своим выступом захватывает шайбы ограничителя вращения кулачка 7. Движение кулачка в обратном направлении заканчивается, когда последняя шайба ограничителя вращения кулачка своим выступом коснется металлорезинового амортизатора 8, снижающего ударные перегрузки и обеспечивающего фиксацию кулачка в исходном положении. При обратном вращении кулачка люфтовыбирающие пружины 9, 10 выполняют совместно с возвратной пружиной 6 функцию возврата кареток 4, 5 в исходное положение.
Таким образом, предлагаемый привод панкратического объектива позволяет исключить из конструкции соединительную муфту и блок управления муфтой, и, как следствие, снизить его массогабаритные характеристики.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Лазарев А.П., Лазарев В.Л. Оптико-электронные приборы управления летательными аппаратами. М.: Машиностроение. 1987.
2. А.с. 1732319 А1, кл.G 02 В 15/14.
3. Фаддеева Л.А. Теория механизмов и детали машин. Л.: Машиностроение. 1983.
4. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления. Пер. с англ. М.: Энергоатомиздат. 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПАНКРАТИЧЕСКОГО ОБЪЕКТИВА | 2003 |
|
RU2260827C2 |
| ПРИВОД ПАНКРАТИЧЕСКОЙ СИСТЕМЫ | 1995 |
|
RU2111440C1 |
| УСТРОЙСТВО для ТРАНСПОРТИРОВАНИЯ и ПОДКЛЮЧЕНИЯ РАДИОЭЛЕМЕНТОВ К ИЗМЕРИТЕЛЬНОМУ БЛОКУ | 1972 |
|
SU332590A1 |
| Установка для плазменного напыления | 1990 |
|
SU1781314A1 |
| Автомат для изготовления электрических катушек | 1977 |
|
SU728175A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| СТАНОК ДЛЯ ПОЛУЧЕНИЯ ЖЕЛЕЗНОЙ ОПРАВЫ ДЛЯ КИСТИ | 2015 |
|
RU2677899C2 |
| Устройство для резки глиняного бруса | 1980 |
|
SU903121A1 |
| СТАНОК ДЛЯ ОБТОЧКИ КОЛЕСНЫХ ПАР БЕЗ ВЫКАТКИ ДЛЯ ВОССТАНОВЛЕНИЯ ПРОФИЛЯ БАНДАЖА ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС | 1996 |
|
RU2107586C1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
Привод панкратического объектива содержит шаговый двигатель, связанный через редуктор с цилиндрическим кулачком с профилированными канавками на образующей, две каретки, кинематически связанные с кулачком, возвратную пружину, одним концом закрепленную на кулачке, а другим концом - на корпусе привода, и блок управления, выход которого соединен с четырьмя обмотками шагового двигателя. Каждая из кареток снабжена люфтовыбирающей пружиной, закрепленной своими концами на каретке и корпусе привода соответственно. На оси вращения цилиндрического кулачка, имеющего выступ на торцевой поверхности, установлен ограничитель вращения кулачка, выполненный в виде кулачковых шайб. На первой шайбе выполнен выступ, контактирующий с выступом цилиндрического кулачка, а последняя установлена с упором в металлорезиновый амортизатор, размещенный на корпусе привода. Обеспечивается снижение массо-габаритных характеристик привода панкратического объектива. 1 ил.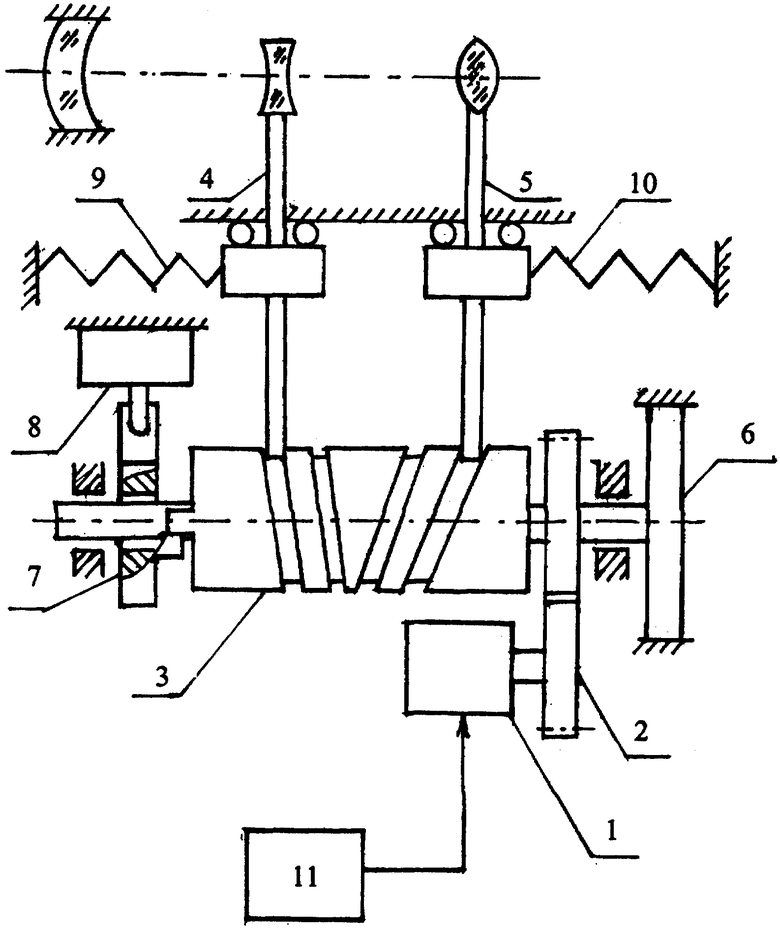
Привод панкратического объектива, содержащий шаговый двигатель, связанный через редуктор с цилиндрическим кулачком с профилированными канавками на образующей, две каретки, кинематически связанные с кулачком, возвратную пружину, одним концом закрепленную на кулачке, а другим концом - на корпусе привода, и блок управления, выход которого соединен с четырьмя обмотками шагового двигателя, отличающийся тем, что каждая из кареток снабжена люфтовыбирающей пружиной, закрепленной своими концами на каретке и корпусе привода соответственно, при этом на оси вращения цилиндрического кулачка, имеющего выступ на торцевой поверхности, установлен ограничитель вращения кулачка, выполненный в виде кулачковых шайб, на первой из которых выполнен выступ, контактирующий с выступом цилиндрического кулачка, а последняя установлена с упором в металлорезиновый амортизатор, размещенный на корпусе привода.
| Привод панкратического объектива | 1990 |
|
SU1732319A1 |

