Изобретение относится к вычислительной технике и может быть применено в системах автоматического регулирования и управления.
Цель изобретения - повьппение точности преобразователя за счет снижения динамической погрешности, возникающей при повьшенных частотах вращения вала преобразователя.
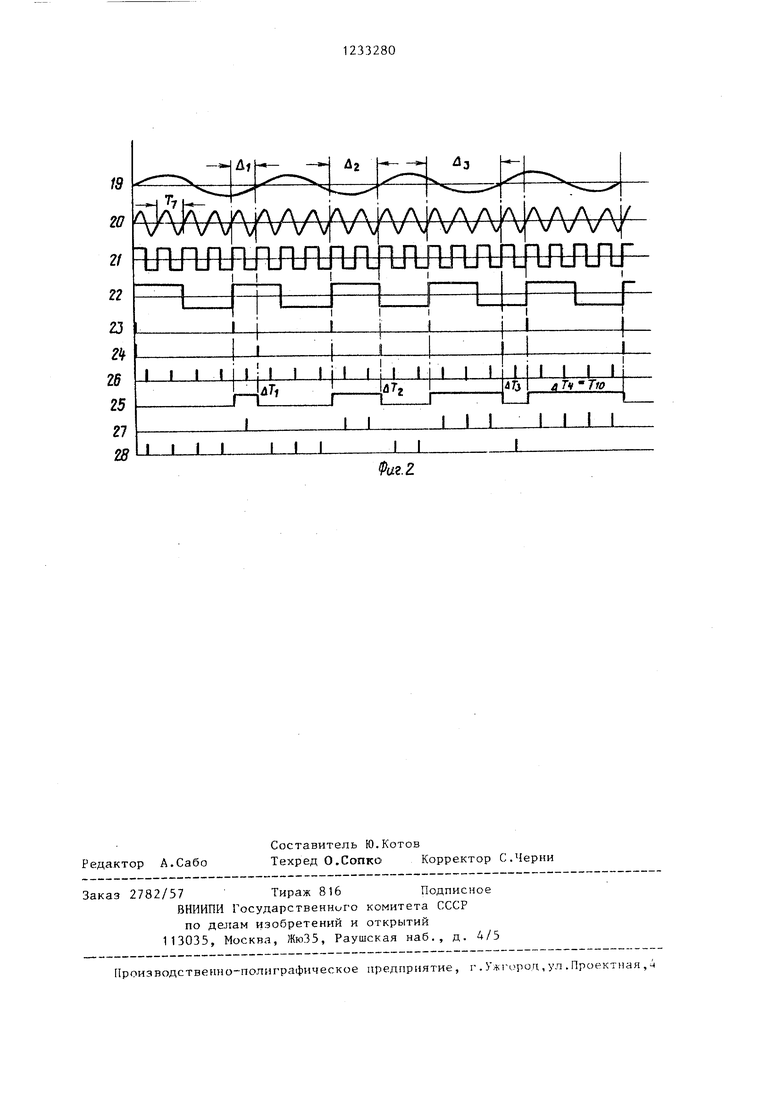
На фиг. 1 представлена фyнкu o- нальная схема преобразователя; на фиг. 2 - временные диаграммы, поясняющие работу преобразователя.
Преобразователь содержит излуча- тель 1, подвижный и неподвижный кодо вые элементы 2 и 3 соответственно с дорожками 4 и 5, фотоприемники 6 и 7, нуль-орган 8, формирователь 9 импульсов, делитель 10 частоты, инвертор 11, нуль-органы 12 и 13, триггер 14, элементы И 15 и 16, счетчик 17 и регистр 18.
Преобразователь работает следующим образом.
При вращении подвижного кодового элемента 2 относительно неподвижного кодового элемента 3 происходит модуляция светового потока от излучателя 1, которая воспроизводится на выходе фотоприемников 6 и 7 в виде периодических сигналов.
Так как элементы 2 и 3 содержат по две дорожки 4 и 5 с числом штрихов, соответственно равных
(2
О,
N 2 с фотоприемников 6
и N 2 7 снии
маются сигналы I . U (фиг. 2, поз. 19
о
и 20)
sin 2 Q.t
Г) h / п t
sin 2 (2
Dfl t
и т которых соответствен
1/2 ()
п Я 1 2 3 I , , J
угловая скорость вращения подвижного элемента 2, с
Сигнал и., предварительно преобразованный в формирователе 9 в сигнал прямоугольной формы той же частоты (поз.21), поступает на вход делителя 10 частоты, обеспечивающего деление на величину, равную 2 . На выходе делителя 10 частоты формируется псмгледовате. гьность импу.тп-сор прямоугольной формы, период Т| (фиг.2, поз.22) которых равен
Т, 1/{2
10
Dsi
s
Таким образом, в преобразователе формируется три синхронизированных между собой сигнала с периодами Т , Т, . За полный оборот подвижного элемента 2 число периодов N , N.. , N.
этих сигналов равно
1Г 2(2%1),
i
N, ( 1)
0
N, 2
Для упрощения сигналы 19, 20 и 22 (фиг,. 2) рассмотрены для случая, когда п 2.
При вращении подвижного элемента 2 (фиг.2) сигнал с делителя 10 частоты смещается по фазе относительно сигнала U. При этом только в одном положении их фазы совпадают. Это положение принимается за нулевой отсчет.
При смещении на угол, равный одному шагу дорожки с числом N-f штри
хов, фазовый сдвиг и ти периодов сигнала Ц делителя 10 частоты.
равен разнос- и сигнала с При перемещении
на два шага фазовый сдвиг & равен удвоенной разности (й, 2д, ) этих периодов и т. д. В общем случае при развороте на j целых шагов дорожки 5 элемента 2 фазовый сдвиг j между этими сигналами равен
Д J
1ТТ j
где j 1, 2,
(1 )
3,..., N 2. С учетом того, что число штрихов на дорожке 5 равно N 2 () N,. выражение (1) может быть пред- в виде
1 З
ставлено
ifi J
u J - -
N N,
(1)
Из выражений (1),(2) следует, что в преобразователе угловому перемещению подвижного элемента 2 на j целых шагов дорожки 5 ставится в соответствие то же количество периодов сигнала и , с дорожки 4, которое разме- щается в интервале, равном фазовому сдвигу между сигналом Ug и сигналом с детгителя 10 частоты.
Из выражения (2) видно, что начало
отсчета, соответствующее нулевому фазовому сдвигу ( Д 0), будет при .
Угловому перемещению на 180° соответствует условие, когда j 0,5 N, при этом фа- овьп1 сдвиг л равен гголовине периода сигнала N с делителя 10 частоты, т.е. , в котором укладывается 0,5 N периодов сигнала U, .
Угловому перемещению растра на 360° соответствует условие, когда j N,при этом фазовый сдвиг .л раве периоду сигнала N, с
тоты, т.е. дывается N
Л 2Tr/N,
делителя 10 час , в котором укла
периодов сигнала U.
Позиционный съем информации об угловом перемещении относительно нулевого положения обеспечивается следующим образом.
Сигналы с делителя 10 частоты и и,- подаются на входы нуль-органов 12
О
и 8, в которых формируются импульсы 23 и 24 в моменты перехода сигналов через нуль. Эти импульсы управляют триггером 14, на прямом выходе которого формируется прямоугольный сигна 25, длительностью которого пропорциональна фазовому сдвигу между сигнало
и, и сигналом с делителя 10 частоты. р
Прямой и инверсный сигналы с триггера 14 подаются на входы элементов И 15 и 16. Импульсы с формирователя 9, предварительно проинвертированные поступают на вход нуль-органа 13. Сформированные нуль-органом 13 импулсы 26 поступают также на входы элеметов И 15 и .16. С выхода элемента И 15 в счетчик 17 поступаю- импульсы 27 количество которых в каждом цикле измерения равно числу целых шагов дорожки 5. Цикл измерения, равный периоду сигнала U., каждый раз завершается в момент появления сигнала с нуль-органа 8, который одновременно дает разрешение на cтиpaнf e в регистре 18 информации об угле, произ- веденной в предыдущем цикле измерени и дает разрешение на перезапись в обнуленный регистр 18 текущей ин- - формации об угле из счетчика 17. Счетчик 17 обнуляется первым импульсом 28 с элемента И 16 следующим за импульсом с нуль-органа 8. Этим самым счетчик 17 подготавливается для приема информации об угле в следующем цикле измерения. Информация об измеренном угле хранится в регист ре 18 до момента завершения следую
щего цикла, равного периоду сигнала Ug или повороту на шаг дорожки 5.
При этом динамическая погрешность в преобразователе принципиально отсутствует, поскольку фазовые и частотные соотношения между информационными сигналами Ug и U. и сигналом с делителя 10 частоты жестко завязаны сопроягаемыми системами дорожек 4 и 5 и при изменении угловых скоростей вращения вала происходит автоматическая синхронизация частот этих сигналов.
Формула изобретения
Фотоэлектрический преобразователь перемещения в код, содержащий оптически соединенные излучатель, подвижный и неподвижный кодовые элементы с первыми и вторыми дорожками и первый и второй фотоприемники, формирователь импульсов, инвертор, первый и второй элементы И, выходы которых соединены с соответствующими входами счетчика, отличающийся тем, что, с целью повышения точности преобразователя, в него введены первый, второй и третий нуль-органы, делитель частоты, триггер и регистр, первые дорожки подвижного и неподвижного кодовых элементов выполнены с числом штрихов NI 2, где п , 2, 3,..., а вторые дорожки выполнены с числом штрихов (2 +-1), выход первого фотоприемника через первый нуль-орган соединен с первым входом триггера и управляющим входом регистра, выход второго фотоприемника через формирователь импульсов соединен с входами делителя частоты и инвертора, выход которого через второй нуль-орган соединен с первыми входами первого и второго элементов И, выход делителя частоты через третий нуль- орган соединен с вторым входом триггера, выходы которого соединены с вторыми входами первого и второго элементов И, выходы счетчика соединены с информационными входами регистра, а выходы регистра являются выходами преобразователя.
Редактор А.Сабо
Составитель Ю.Котов
Техред О,Сопко Корректор С.Черни
Заказ 2782/57 Тираж 816 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Жю35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород,ул.Проектная,ч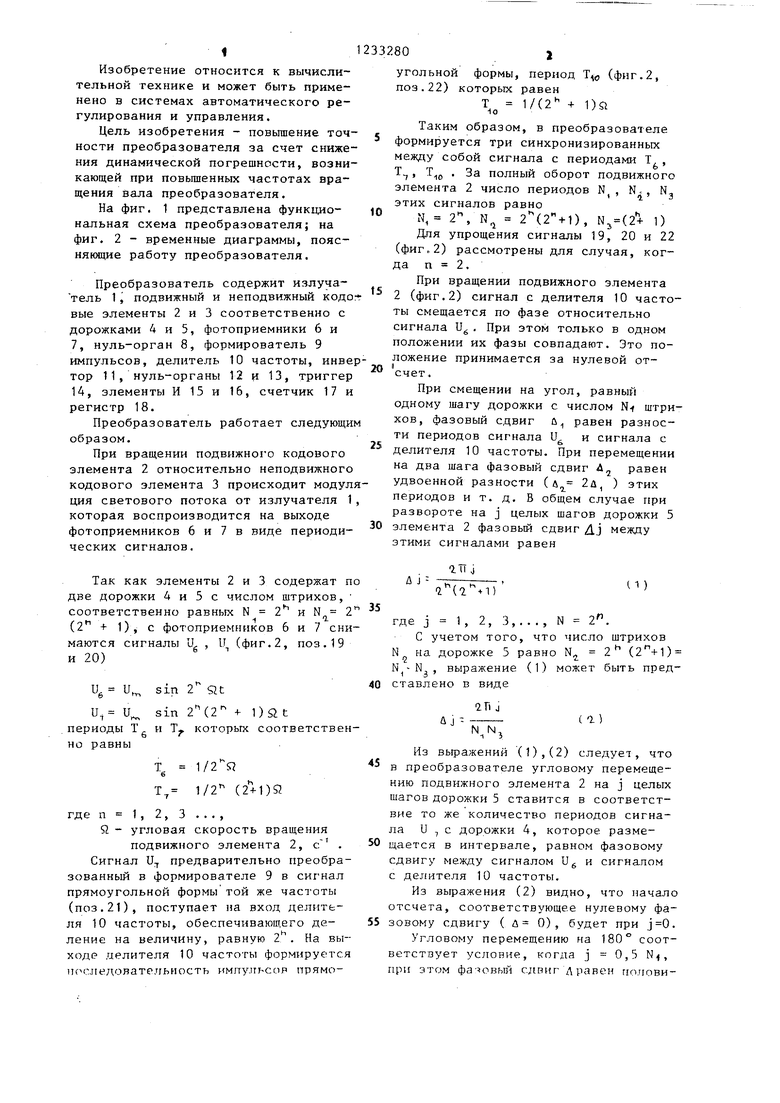
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрический преобразователь перемещения в код | 1984 |
|
SU1288911A1 |
| Фотоэлектрический преобразователь перемещений в код | 1984 |
|
SU1332532A1 |
| Фотоэлектрический преобразователь угол-код | 1984 |
|
SU1197081A1 |
| Фотоэлектрический преобразователь перемещения в код | 1984 |
|
SU1259483A1 |
| Преобразователь угол-код | 1983 |
|
SU1116447A1 |
| Фотоэлектрический преобразователь перемещения в код | 1989 |
|
SU1676102A1 |
| Способ измерения углового перемещения объекта | 1989 |
|
SU1791705A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1698990A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1992 |
|
RU2085034C1 |
| Способ преобразования перемещения в код и устройство для его осуществления | 1984 |
|
SU1269260A1 |
Фотоэлектрический преобразователь перемещения в код относится к вычислительной технике и может быть использован в системах автоматического регулирования и управления. Цель изобретения - повышение точности преобразователя за счет снижения динамической погрешности. Преобразователь содержит излучатель 1, кодовые подвижный и неподвижньй элементы 2 и 3 с дорожками 4 и 5, фотоприемники 6 и 7, нуль-органы 8, 12 и 13, формирователь 9 импульсов, делитель 10 частоты, инвертор 11, триггер 14, элементы И 15 и 16, счетчик 17 и регистр 18. При вращении подвижного элемента 2 формируются три последовательности сигналов, синхронизированные между собой. При этом только в одном положении вала преобразователя фазы этих сигналов совпадают. Это положение принимается за нулевое положение. При вращении вала преобразователя эти последовательности автоматически синхронизируются, так как они жестко связаны сопрягаемыми системами дорожек 4 и 3 элементов 2 и 3. 2 ил. (Л 1чЭ со оо ьр оо
| Преснухин Л | |||
| и др | |||
| Муаровые растровые датчики положения и их применения | |||
| М | |||
| : Машиностроение, 969, с.132 | |||
| Фотоэлектрический преобразователь перемещения в код | 1977 |
|
SU720458A1 |
