Изобретение относится к области измерительной техники и может быть использовано, например, в фотоэлектрических растровых преобразователях при измерениях угловых перемещений в различных областях приборостроения.
Известен способ, заключающийся в том, что формируют двухфазную систему сигналов несущей частоты, формируют че- тырехфазную систему измерительных сигналов, преобразуют ее в двухфазную систему квадратурных измерительных сигналов, лишенных постоянной составляющей, производят перемножение каждого сигнала несущей частоты с соответствующим квадратурным измерительным сигналом, формируют информационный сигнал
путем вычитания перемноженных сигналов и по фазовому сдвигу этого сигнала, который пропорционален угловому перемещению в пределах шага растра, судят о величине перемещения.
Устройство по данному способу содержит фотоэлектрический растровый датчик, который формирует четыре синусоидальных сигнала, последовательно сдвинутых относительно друг друга на л /2, два дифференциальных усилителя, с помощью которых четырехфазная система сигналов с датчика преобразуется в двухфазную систему измерительных сигналов, генератор импульсов несущей частоты, фазорасщепитель, два перемножителя и вычитатель.
V|
О
V4 О СЛ
На выходе этого устройства реализуется сигнал
U Um-COS ( GJt - Q)
Фотоизмерительное устройство определяет фазовый сдвиг выходного сигнала bTHps lbfjJHO опорного сигнала с генератора несущей частоты . Временная фаза хоЙйо гЬ ,сигнала, измеренная с помощью фазЬиЗмЪрительного устройства, численно равна пространственной фазе муаровой полосы 2 л- подвижного растра в пределах w
его шага W
Недостатком данного способа является низкая точность из-за неопределенности фиксации угла поворота при измерении угловых перемещений в пределах угла 360°. При перемещении подвижного растра в пределах угла от 0 до 360° временная фаза
в меняется N раз, где N
число штрихов на ра страх, т.е. при угловых перемещениях на некоторый угол а , превышающий величину шага растра, наблюдается повторяемость, результатов измерения и преобразования,которая вносит неопределенность при фиксации угла, превышающего величину шага растра.
Известен способ измерения угловых перемещений объекта, заключающийся в том, что формируют в функции угла повороти с помощью растрового преобразователя два инерционных сигнала несущей частоты Wo 2 п f0i.
Ui Ucos( Wot + N1 a ),
U2 U COS ( (Do t + N2 «
при этом обеспечивая соотношение Ni - N2 1, где N1 и П2 - число штрихов соответствующих растров, с помощью которых формируются эти сигналы.
Так как электрические фазы сигналов Ui и U2 изменяются на 2 соответственно NI и N2 раза при угловом перемещении растра на 360°, то очевидно, что разностная фаза этих сигналов будет изменяться также на 360° за один оборот.
Таким образом, в известном способе измеряемое значение фазы между сигналами LH и U2 соответствует вполне определенному углу в пределах одного оборота, Т.е. данное техническое решение характеризуется помехозащищенностью от разного рода сбоев, т.к. информация об угловом положении восстанавливается с частотой
Здэ 2 п f0 в каждом последующем цикле измерения.
Первым недостатком известного способа является сложность в его реализации.
Связано это с тем, что для формирования двух информационных сигналов Ui и U2 необходимо использовать генератор квадратурных синусоидальных сигналов несущей частоты С0о , обеспечить попарное перемнржение этих сигналов с соответствующими квадратурными сигналами sin N1 а , cos N1 а и sin N2, a cos № и .формируемыми растровым датчиком, обеспечить по- парное суммирование и вычитание
перемноженных сигналов.
Для последующего преобразования фазового сдвига между информационными и опорными сигналами в цифровой п-разряд- ный код необходимо дополнительно формировать тактовые импульсы частотой fT to 2П, которым заполняют временные интерва- лы. Из рассмотренного видно, что аппаратурные затраты на реализацию известного способа достаточно велики.
Другим недостатком известного способа является ограниченная динамика угловых измерений.. .
Эти Ограничения для известного спосо-с ба принципиально существуют и определяются соотношением частоты опорного сигнала fo и требованиями к дискретности (разрешающей способности) измеряемого угла.
Максимальная угловая скорость
QMSKC измерения в рассматриваемом случае определяется соотношением:
Q
макс -
.360 -f
. m N
360е
m N tnp
(О/С)
5
0
5
1
где fo - опорная частота (частота преобtnp
разования);
tnp - время преобразования;
m 2П - коэффициент интерполяции периода информационного сигнала Ui;
п - число двоичных разрядов;
N - коэффициент электрической редукции информационного сигнала Ui, равный числу штрихов на растре.
При максимально допустимой угловой скорости QMaxc еще реализуется максимальное число циклов преобразования Кмэкс - m- N) за оборот, т.е. обеспечивается формирование требуемого числа дискрет- ных уровней квантования за один оборот:
360° f0
Kmakc - -г)---- Ьчиакс
Из вышеприведенного соотношения видно, что по мере увеличения допустимой угловой скорости QMSKC будет пропорционально уменьшаться число дискретных уровней квантования, формируемых за один оборот, т.е. ухудшается разрешающая способность устройства, что естественно приводит к увеличению систематической погрешности преобразования.
Из рассмотренного следует, что известное устройство обладает ограниченным динамическим диапазоном и точностью преобразования, а также сложностью практической реализации способа для обеспечения повышенной помехозащищенности преобразования и измерения угловых перемещений.
Целью изобретения является повышение точности измерения за счет расширения динамического диапазона и упрощение способа/обеспечивающего повышение помехозащищенности измерений.
Цель достигается тем, что в способе измерения угловых перемещений объекта, заключающемся в том, что формируют с помощью растровой системы, связанной с объектом, две последовательности импульсов, число импульсов в каждой последовательности равно N и (N + 1) при повороте объекта на 360°, формируют временные интервалы, согласно изобретению формируют с помощью растровой системы третью последовательность импульсов, число которых равно N-(N + 1) при повороте объекта на 360°, временные интервалы формируют таким образом, что они равны накапливающейся разности фаз между- импульсами первой и второй последовательности, заполняют временные интервалы импульсами третьей последовательности, а по числу импульсов, заполняющих каждый из временных интервалов, судят об угловом перемещении объекта.
Сопоставительный анализ заявленного решения с прототипом показывает, что заявленный способ отличается от известного тем, что в нем дополнительно формируют с помощью растровой системы третью последовательность импульсов, число которых равно N (N + 1) при повороте объекта на 360°, временные интервалы формируют таким образом, что они равны накапливающейся разности фаз между импульсами первой и второй последовательности, заполняют временные интервалы импульсами третьей последовательности, а по числу импульсов судят об угловом перемещении объекта, что соответствует критерию новизна.
При изучении других известных технических решений в данной области техники
признаки, отличающие заявленное изобретение от прототипа, не были выявлены и потому они обеспечивают заявляемому техническому решению соответствие критерию
существенные отличия.
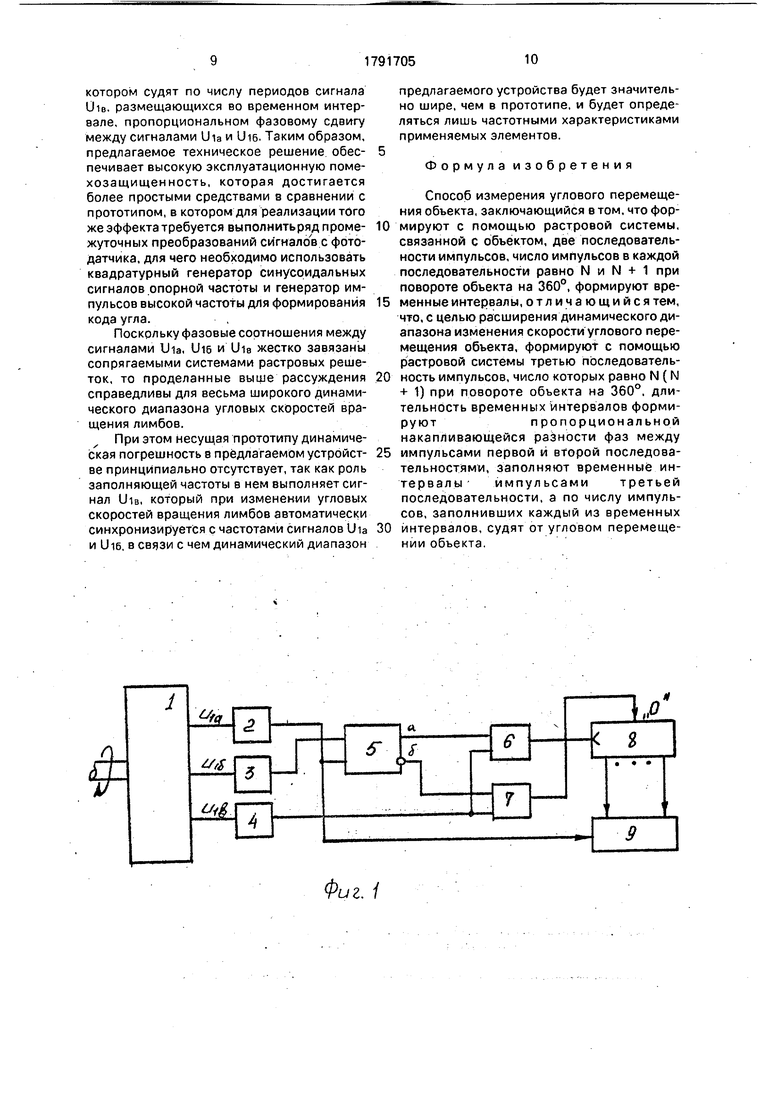
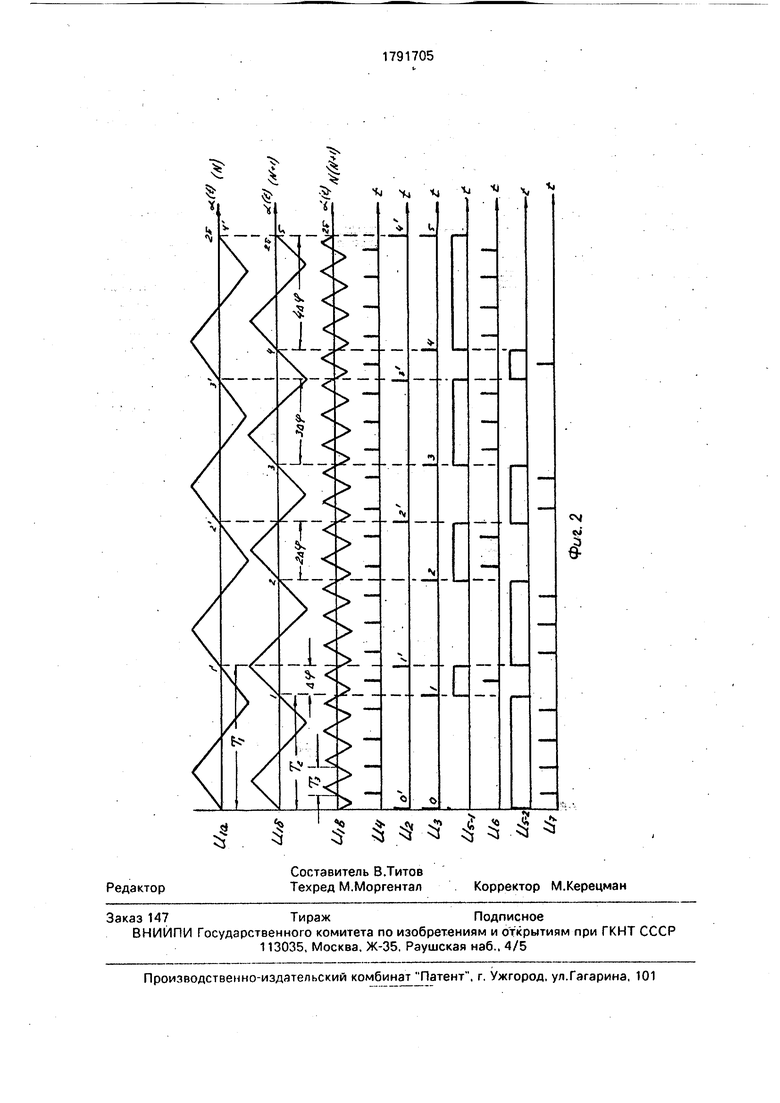
На фиг. 1 и 2 представлены структурная схема устройства и временная диаграмма, которые поясняют принцип действия предлагаемого способа.
Устройство содержит растровый датчик 1. нуль-органы 2- 4, триггер 5, схемы совпадения 6,7,счетчик 8, регистр 9.
Устройство, реализующее предложенный способ, работает следующим образом.
Растровое сопряжение датчика 1 (фиг.1) включает две идентичные системы растровых решеток, каждая из которых состоит из трех растровых дорожек. Первая растровая дорожка состоит из N шагов, вторая растровая дорожка включает N + 1 шагов, третья растровая дорожка состоит из N ( N + 1) шагов. Угловые шаги растров соответственно равны
5
Wi
In , N In
W2
2тг N + 1
N(N +1 )
W3 0)
Из соотношений (1) видно, что шаги первой растровой дорожки N смещены после: довательно относительно шагов второго растра с числом штрихов N + 1 на величину угла А , пропорциональную разности их
угловых шагов, т.е.
Д Wi - Л/2
2лГ-1 1 1- ,2яп z п N N + 1 N(N +1 ) w
Именно этой величине равен шаг третьей растровой дорожки:
45
Л/з
2л:
N ( N + 1 )
Из рассмотренного следует, что на i-м
шаге растровой дорожки с числом штрихов
N i-й шаг растровой дорожки с числом штри50 хов N + 1 будет смещен по углу на величину
Д|
2л
N(N +1 )
I; где i 1,2,3,..., п (3)
и, следовательно, в этом интервале будет укладываться i целых шагов Л/з растра третьей дополнительной дорожки. При i N
это смещение будет равно шагу Л/2 (т.к. А 2 Л
N(N +1 ) .
N W2 ), в котором число . Л/2
шагов Л/з уложится N раз (т.к. ттт- N), При
$
I N/2 пространственное смещение будет равно половине шага Л/з. т.к.
A №;
In
jg л w2
N(N +1 ) 2 (N +1 )- 2
и, следовательно, в этом интервале уложится число шагов Л/з только N/2 раз, и т.д.
При вращении подвижного растра датчика будет происходить модуляция проходящего через растровое сопряжение светового потока, которая преобразуется фотоприемниками, расположенными в зоне каждой штриховой дорожки, в электрические сигналы вида (фиг.2):
Uia U An Na U-SinT-«
Uie U-sin(N +1) a U-SinT2a (5) UB U-sin N(N + 1) a U-SinT3 a (6)
С учетом вышерассмотренного не трудно видеть, что сигналы Uia и Уш.на выходе фотоприемников, расположенных в зонах сопряжения растровых решеток с шагом Wi и W 2, по мере разворота растров будут смещаться в пространстве относительно друг друга в соответствии с полученным ранее выражением (3).
При этом, как видно из фиг.2, только в одном случае фазы сигналов Uia и Ui6 совпадают и это положение принимается за нулевое, т.е. за начало отсчета.
При взаимном развороте растров относительно нулевого отсчета на углы, равные шагу штрихов дорожки N, происходит последовательное смещение по фазе сигналов Uia и Uie на величину Дуэ .равную
360°
N(N +1 )
(7),
В общем случае при смещении на I шагов дорожки N пространственный сдвиг между этими сигналам составит
360е
N(N+1)
.Ј,
что соответствует i периодам Тз сигнала Die. которые разместятся в интервале, равном этому пространственному сдвигу.
Таким образом пространственное угловое смещение измеряется путем подсчета целого числа периодов сигнала UiB. размещающихся во временном интервале, рав5 ном пространственному сдвигу между сигналами Uie и Uia.
Сигналы Uia и Uie подаются на входы нуль-органов 2,3, в которых формируются импульсы 1)2, Us в момент перехода сигнала
10 через нуль в положительном направлении (см. фиг.2). Импульсы Us, Ua управляют триггером 5, на прямом выходе которого формируется прямоугольный сигнал Us-1, длительность которого пропорциональна
15 пространственному сдвигу между сигналами Uia и Ui;, а на инверсном выходе формируется импульс Us-2.
Прямой и инверсный; сигналы с триггера 5 подаются на первые входы схем 6 и 7,
20 на вторые входы которых подаются импульсы U4, сформированные нуль-органом 4 по нуль-переходам сигнала UiB с растровой решетки с шагом Л/з. Таким образом, со схемы совпадения 6 в счетчик 8 будут поступать
25 импульсы Ue, количество которых в каждом цикле измерения будет равно числу целых шагов растровой решетки с числом штрихов N, на которые произведен разворот. Цикл измерения, равный периоду сигнала Ufa.
30 каждый раз завершается в момент появления импульсного сигнала ид с нуль-органа. 2, который одновременно дает разрешение на стирание в регистре 9 информации об угле, произведенной в предыдущем цикле
35 измерения, и дает разрешение на перезапись в обнуленный регистр 9 текущей информации об угле из счетчика 8. Счетчик 8 обнуляется первым импульсом U со схемы совпадения 7, и тем самым он подготавли40 вается для приема информации об угле в следующем цикле измерения. Информация же об измеренном угле хранится в регистре 9 до момента завершения разворота на последующий полный шаг Wi растровой ре45 шетки.
Из рассмотренного видно, что предлагаемое устройство обеспечивает позиционное преобразование информации об угле поворота в диапазоне 0-360 угл. градусов.
50 При этом информация выдается относительно единственного нулевого положения, которым является момент совпадения фаз сигналов Uia и Uie.
При потере информации от себя в цепях
55 питания она полностью восстанавливается в следующем цикле (т.е. при повороте на угол Wi), поскольку фазовый сдвиг между сигналами Uia и Ui6 в каждом цикле измерения несет полную информацию об угле разворота относительно нулевого положение, о
котором судят по числу периодов сигнала UiB. размещающихся во временном интервале, пропорциональном фазовому сдвигу между сигналами Uia и Uie. Таким образом, предлагаемое техническое решение обес- печивает высокую эксплуатационную поме- хозащищенность, которая достигается более простыми средствами в сравнении с прототипом, в котором для реализации того же эффекта требуется выполнить ряд п роме- жуточных преобразований сигнало в с фотодатчика, для чего необходимо использовать квадратурный генератор синусоидальных сигналов опорной частоты и генератор импульсов высокой частоты для формирования кода угла.
Поскольку фазовые соотношения между сигналами Uia, Uie и Ui8 жестко завязаны сопрягаемыми системами растровых решеток, то проделанные выше рассуждения справедливы для весьма широкого динамического диапазона угловых скоростей вращения лимбов.
, При этом несущая прототипу динамическая погрешность а предлагаемом устройст- ве принципиально отсутствует, так как роль заполняющей частоты в нем выполняет сигнал UiB, который при изменении угловых скоростей вращения лимбов автоматически синхронизируется с частотами сигналов Uia и Ui6, в связи с чем динамический диапазон
предлагаемого устройства будет значительно шире, чем в прототипе, и будет определяться лишь частотными характеристиками применяемых элементов.
Формула изобретения
Способ измерения углового перемещения объекта, заключающийся в том, что формируют с помощью растровой системы, связанной с объектом, две последовательности импульсов, число импульсов в каждой последовательности равно N и N + 1 при повороте объекта на 360°, формируют временные интервалы, отличающийся тем, что, с целью расширения динамического диапазона изменения скорости углового перемещения объекта, формируют с помощью растровой системы третью последовательность импульсов, число которых равно N (N + 1) при повороте объекта на 360°. длительность временных интервалов формируютпропорциональнойнакапливающейся разности фаз между импульсами первой и второй последовательностями, заполняют временные интервалы импульсами третьей последовательности, а по числу импульсов, заполнивших каждый из временных интервалов, судят от угловом перемещении объекта.

| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрический преобразователь перемещения в код | 1984 |
|
SU1259483A1 |
| Фотоэлектрический преобразователь перемещения в код | 1989 |
|
SU1676102A1 |
| Фазоимпульсный преобразователь угловых перемещений | 1975 |
|
SU954821A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822118A1 |
| Фотоэлектрический преобразователь перемещения в код | 1984 |
|
SU1233280A1 |
| Фотоэлектрический преобразователь угловых перемещений | 1977 |
|
SU696280A1 |
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822117A1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ПРИ ДИАГНОСТИКЕ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2210068C1 |
Изобретение относится к измерительной технике. Цель изобретения - расширение динамического диапазона изменения скорости углового перемещения объекта. На выходе растровой системы 1, связанной с объективом, формируются при повороте объекта три последовательности импульсов. За один оборот объекта число импульсов в первой последовательности равно N, во второй последовательности - N + 1, в третьей последовательности - N(N + 1), Фазовый сдвиг между импульсами первой и второй последовательности преобразуется нуль- органами 2,3, триггером 5 во временной интервал. Временной интервал заполняется импульсами третьей последовательности с помощью нуль-органа 4, схемы 6 совпадения. Результат измерения в виде кода фиксируется счетчиком 8 и периодически переписывается в регистр 9. В регистре 9 фиксируется результат, связанный с позиционным угловым положением объекта. 2 ил-. СЛ
Фиг. 1
I
-
tj
N cvi
I
| Преснухин Л.И | |||
| и др | |||
| Фотоэлектрические преобразователи информации | |||
| М.: Машиностроение, 1974, с | |||
| Способ добывания бензина и иных продуктов из нефти, нефтяных остатков и пр. | 0 |
|
SU211A1 |
