2, Привод по п. 1, отличающийся тем, что он снабжен - бесконтактным электромагнитом, катушка которого установлена на
Изобретение относится к станкостроению и может быть применено в металлорежущих высокоточных станках например токарных, где требуется в процессе высокоскоростной финишной обработки свести к минимуму влияние элементов привода на качество обработки.
Цель изобретения - повышение точности обработки и сокращение осевых размеров устройства.
Поставленная цель достигается путем снабжения щеток токоподвода подъемньми устройствами и бесконтактным электромагнитом, катушка которо- го установлена на корпусе, а якорь на шпинделе.
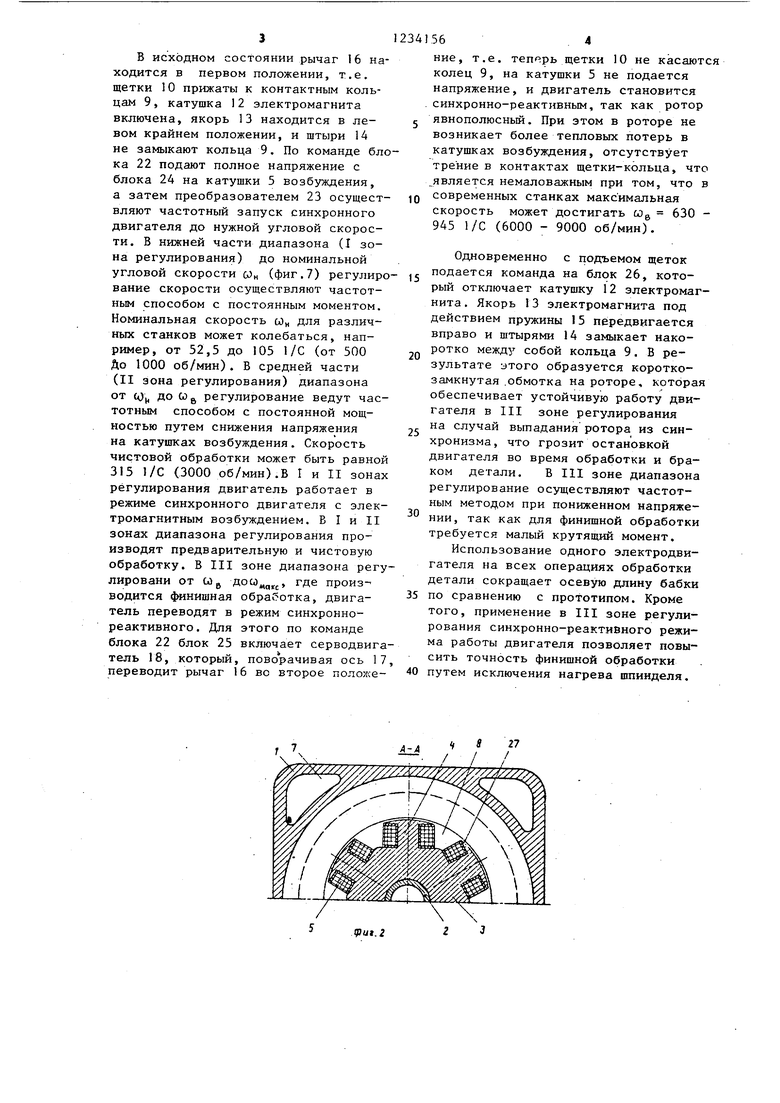
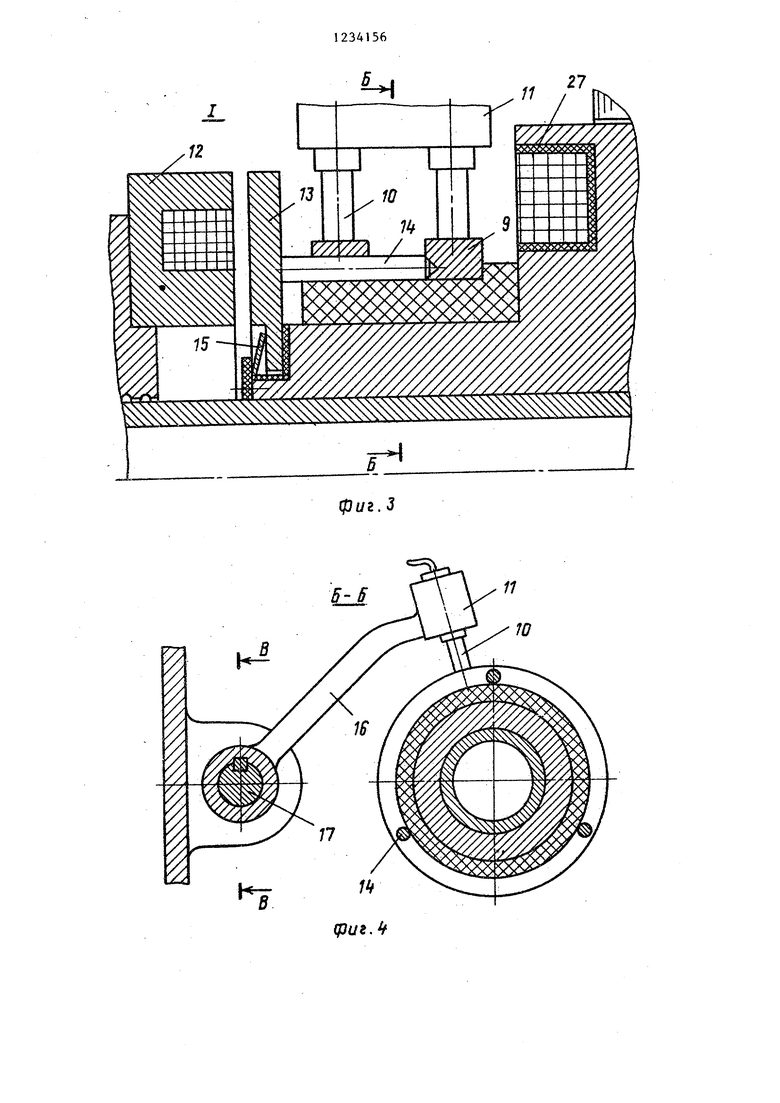
На фиг. 1 схематически представлена шпиндельная бабка.токарного станка, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг, 3 - узел Г на фиг. 1 (щеточный узел); на фиг, 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг.4; на фиг. 6 - блок-схема главного привода; на фиг. 7 - график зависимостей момента М f(o) и мощности Р f, (со) во всем диапазоне регулирования.
Главный привод имеет корпус 1 шпиндельной бабки, в котором на опо- pax установлен шпиндель 2. Непосред-- ственно на шпинделе жестко закреплен ротор 3, имеющий полосы 4 с катушками 5 возбуждения, которые для монолитности залиты компаундом на основе эпоксидной смолы. Б корпусе 1 нахо- Йится статор 6 с трехфазной обмоткой отвод тепла от которого осуществляется (кроме наружной поверхности корпуса) через каналы 7, по которым прокачивается воздух от независимого вентилятора (не показан). Для лучшего теплоотвода к корпусу лобовые части запиты компаундом. Одновременно охлаждающий воздух про- качивается в пазах 8 между катушкакорпусе привода, а якорь - на шпинделе, причем на якоре установлены введенные в привод штыри.
ми возбуждения. На роторе установлены контактные кольца 9, через которые осуществляется токоподвод к катушкам возбуждения посредством щеток 10, установленных в щеткодержателе J1. На задней стенке корпуса 1 закреплена катушка 12 электромагнита, якорь 13 которого установлен на шпинделе с возможностью осевого перемещения. На якоре закреплены три медных штыря 14, накоротко замыкающие контактные кольца 9 при отключенной катушке 12, поскольку якорь поджимается тарельчатой пружиной 15. Щеткодержатель 11 закреплен на рычаге 16, который имеет возможность поворота вместе с осью 17, приводящейся в движение электромеханиэмом 18, и может быть выполнен, например, в виде микросерводвигателя с редуктором. Рычаг 6 останавливается электромеханизмом в двух положениях: щетки прижаты к контактным кольцам (фиг.4) щетки подняты и не касаются колец. Фиксация этих положений осуществляется упорами (не показаны).
На рабочем конце шпинделя установлен патрон 19, а на противополож-г ном - зажимное устройство 20. У задней опоры шпинделя расположен датчик скорости, например тахогенератор 21, осуществляющий обратную связь пр скорости.
Система управления приводом шпинделя состоит из блока 22 управления, частотного преобразователя 23, блока 24 регулирования напряжения постоянного тока и блоков 25 и 26 коммутации.
Для предотвращения нагрева ротора при работе двигателя с возбуждением катушки 5 возбуждения установлены в теплоизолирующие стаканы 27.
Привод работает следующим образом.
В исходном состоянии рычаг 16 находится в первом положении, т.е. щетки 10 прижаты к контактным кольцам 9, катушка 12 электромагнита включена, якорь 13 находится в левом крайнем положении, и штыри 14 не замыкают кольца 9. По команде блока 22 подают полное напряжение с блока 24 на катушки 5 возбуждения, а затем преобразователем 23 осуществляют частотный запуск синхронного двигателя до нужной угловой скорости. В нижней части диапазона (I зона регулирования) до номинальной угловой скорости Ын (фиг.7) регулиро вание скорости осуществляют частотным способом с постоянным моментом. Номинальная скорость со„ для различных станков может колебаться, например, от 52,5 до 105 1/С (от 500 До 1000 об/мин). Б средней части (II зона регулирования) диапазона от сОц до Qg регулирование ведут частотным способом с постоянной мощностью путем снижения напряжения на катушках возбуждения. Скорость чистовой обработки может быть равной 313 1/С (3000 об/мин).В I и II зонах регулирования двигатель работает в режиме синхронного двигателя с электромагнитным возбуждением. В I и II зонах диапазона регулирования производят предварительную и чистовую обработку. В III зоне диапазона регу лировани от Сл)ц досо„д,, где производится финишная обработка, двигатель переводят в режим синхронно реактивного. Для этого по команде блока 22 блок 25 включает серводвигатель 18, который, поворачивая ось 17 переводит рычаг 16 во второе положе
0
5
5
0
5
0
ние, т.е. теперь щетки 10 не касаются колец 9, на катушки 5 не подается напряжение, и двигатель становится синхронно-реактивным, так как ротор явнополюсный. При этом в роторе не возникает более тепловых потерь в катушках возбуждения, отсутствует трение в контактах щетки-кольца, что является немаловажным при том, что в современных станках максимальная скорость может достигать cOg 630 - 945 1/С (6000 - 9000 об/мин).
Одновременно с подъемом щеток подается команда на блок 26, который отключает катушку 12 электромагнита. Якорь 13 электромагнита под действием пружины 15 передвигается вправо и штырями 14 замыкает накоротко междз собой кольца 9. В результате атого образуется коротко- замкнутая .обмотка на роторе, которая обеспечивает устойчивую работу двигателя в III зоне регулирования на случай выпадания ротора из синхронизма, что грозит остановкой двигателя во время обработки и браком детали. В III зоне диапазона регулирование осуществляют частотным методом при пониженном напряжении, так как для финишной обработки требуется малый крутящий момент.
Использование одного электродвигателя на всех операциях обработки детали сокращает осевую длину бабки по сравнению с прототипом. Кроме того, применение в III зоне регулирования синхронно-реактивного режима работы двигателя позволяет повысить точность финишной обработки путем исключения нагрева шпинделя.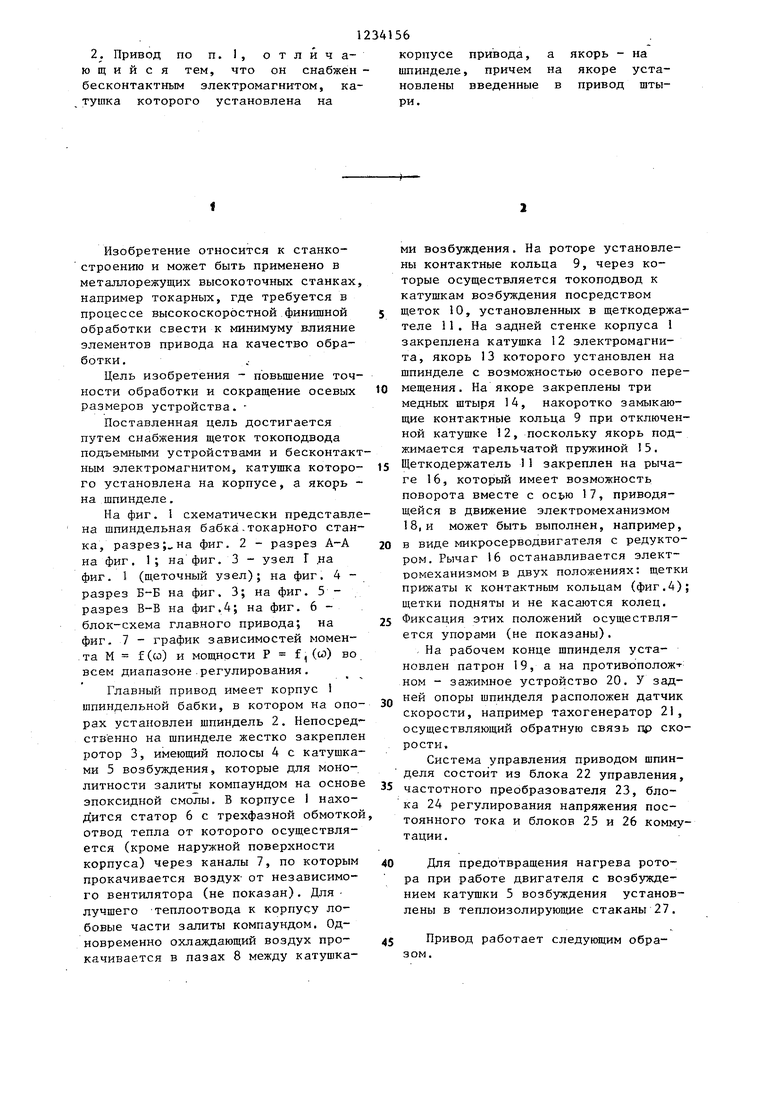
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный двигатель релина-кузнецова | 1973 |
|
SU479200A1 |
| РЕПУЛЬСИОННЫЙ БЕСКОЛЛЕКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2304838C2 |
| ТОРЦОВЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ИНДУКТОРНОГО ТИПА | 2003 |
|
RU2286643C2 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2185018C2 |
| Электрический двигатель постоянного тока | 1980 |
|
SU985894A1 |
| БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ СИСТЕМЫ СИМЕНСА | 1928 |
|
SU17372A1 |
| ЯВНОПОЛЮСНЫЙ КОЛЛЕКТОРНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2010 |
|
RU2414796C1 |
| Устройство для улавливания ленточной пилы при обрыве | 1989 |
|
SU1717347A1 |
| ЛИНЕЙНЫЙ ЦИЛИНДРИЧЕСКИЙ ДВИГАТЕЛЬ | 2011 |
|
RU2483418C2 |
| Электромеханический преобразователь тока | 1973 |
|
SU535679A1 |

iput.2
Z7
(руг. J
Н
11
Л
в-в
J8
| Комбинированный привод шпинделя | 1978 |
|
SU770738A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
