Изобретение относится к электротехнике и может быть использовано, например, в горной и нефтехимической промышленности для управления системами электроприводов, питающихся от автономного генератора соизмеримой мощности, в частности от синхронного генератора с приводом от газотурбин- noi O двигателя.
Целью изобретения является снижение установленной мощности и повышение надежности.
На чертеже представлена блок-схема автономной системы электропитания.
Автономная система электропитания, содержит первичный двигатель 1 с синхронным генератором 2, выходом соединенным с шинами 3 электрической сети, выпрямитель- но-инверторньш преобразователь 4, с блоком 5 импульсно-фазовоого управления, содер- , например, первую 6 и вторую 7 системы импульсно-фазового управления, а также нагрузки 8 и 9 длительного и повторно-кратковременного режимов работы соответственно.
Датчик 10 активной мощности включен в выходную цепь синхронного генератора 2.
Система содержит также нелинейный блок 11 сравнения, датчик 12 технологического параметра нагрузки 8 длительного режима работы, низкочастотный фильтр 13, блок 14 сравнения, интегратор 15 с двумя входами, релейный элемент 16 с выдержкой времени. Нагрузка 8 длительного режима работы содержит приводной двигатель 17 с технологическим механизмом 18 и входом связана через выпрямительно-инверторный преобразователь 4 с шинами 3 электрической сети. Выход датчика 12 технологического парметра нагрузки 8 длительного режима работы соединен через низкочастотный фильтр 13 с первым входом блока 14 сравнения, второй вход которого соединен с выходом блока задания технологического параметра (не показан), а выход - с первым входом интегратора 15. Второй вход интегратора 15 подключен к первому выходу нелинейного блока 11 сравнения, второй выход которого через релейный элемент 16 с выдержкой времени связан с входом защиты первичного двигателя 1. Первый вход нелинейного блока 11 сравнения подключен к выходу датчика 10 активной мощности, а его Е торой вход - к блоку 19 задания уровня ограничения, при этом выход интегратора 15 подключен к входу блока 5 им- нульсно-фазового управления вьшрямитель- но-инверторного преобразователя 4.
Автономная система электропитания работает следующим образом.
При подаче напряжения на шину 3 получает питание выпрямительно-инверторный преобразователь 4, приводной двигатель 17 разворачивается в соответствии с программой, заданной уровнем сигнала с блока за- ,а,ания технологического параметра на второй
вход блока 14 сравнения, и приводит в действие технологический механизм 18. Информация о текущем значении технологического параметра с выхода датчика 12 технологи- меского нараметра поступает через низкочастотный фильтр 13 на первый вход блока 14 сравнения, где сравнивается с заданным уровнем. Если выходное напряжение блока
14сравнения равно нулю, то скорость вращения приводного двигателя 17 остается постоянной величиной, так как сигнал с выхода блока 14 сравнения на вход интегратора 15 не подается и углы управления блока 5 импульсно-фазового управления и систем 6 и 7 импульсно-фазового управления
не изменяются. При этом выходное напряжение с нелинейного блока 1 1 сравнения равно нулю, так как уровень потребляемой .мощности достаточно высок. Уровень мощности, потребляемой от синхронного гене ратора 2, контролируется нелинейным бло
ком 11 сравнения. Если значение потребляемой мощности окажется меньше минимально допустимого, то на выходе нелинейного блока 11 сравнения появляется напряжение, поступающее на вход интегратора 15, благодаря чему угол управления выпрямителя выпрямительно-инверторного преобразователя 4 изменяется, его напряжение растет и увеличивается мощность, потребляемая нагрузкой 8 длительного режима работы. Выходная мопдность синхронного генеР ТОР 2 поддерживается на уровне, несколько превыщающем его минимальную мощность. С ростом нагрузки 9 повторно- кратковременного режима работы потребляемая мощность генератора увеличивается, выходное напряжение нелинейного блока 11
сравнения становится равным нулю, а суммарное входное напряжение интегратора
15- отрицательным. Вынрямленное напряжение выпрямительно-инверторного преобразователя 4 уменьщается, снижается скорость двигателя. Среднее значение технологического параметра, контролируемое датчиком 12 технологического параметра, остается при этом неизменным.
Сигнал с выхода датчика 10 активной мощности поступает на вход нелинейного блока 11 сравнения, с выхода которого в соответствии с нелинейной характеристикой блока подается на вход релейного элемента 16с выдержкой времени. Выход последнего связан с системой защиты первичного двигателя 1. При этом первичный двигатель 1 может переводится в режи.м с отсеканием топливоподачи или отк тючается с выдержкой времени, зависящей от данных автономной системы электропитания (приведенного момента инерции врапдающихся частей и характеристики синхронного генератора). Такой режим является аварийным и ег о диагностика и ограничение позволяют увеличить ресурс автономной системы электропитания.
Таким образом, управление нагрузкой длительного режима в функции выходной мощности генератора позволяет снизить колебания мощности его при работе потребителей с повторно-кратковременным режимом, в том числе и при знакопеременном моменте указанной нагрузки.
Снижение колебаний активной мощности достигается за счет регулирования нагрузки длительного режима с установленной мощностью преобразовательного оборудования, в 2-3 раза меньщей, чем мощность генератора. Снижение колебаний мощности влечет за собой снижение действующего значения тока генератора, вследствие чего его установленная мощность может быть снижена на 15-18% и повыщается надежность функционирования системы.
Формула изобретения
Автономная система электропитания,содержащая первичный двигатель с синхронным генератором, выходом соединенным с щинами электрической сети, выпрямительно- инверторный преобразователь с блоком им- пульсно-фазового управления, нагрузки длительного и повторно-кратковременного режимов работы, отличающаяся тем, что, с целью снижения установленной 1мощности и повыщения надежности, в нее дополнительно введены датчик активной мощности, включенный в выходную цепь синхронного генератора, нелинейный блок сравнения, датчик технологического параметра нагрузки длительного режима работы, низкочастотный фильтр, блок сравнения, интегратор с двумя входами, релейный элемент с выдержкой времени, нагрузка длительного режима работы содержит приводной двигатель, входом связанный через выпрямительно-инверторный
0 преобразователь с щинами электрической сети, выход датчика технологического параметра нагрузки длительного режима работы связан через низкочастотный фильтр с первым входом блока сравнения, второй вход которого соединен с выходом введенного блока задания технологического параметра, а выход - с первым входом интегратора, второй вход которого подключен к первому выходу нелинейного блока сравнения, второй выход которого через релейный элемент с выдержкой времени связан с входом защиты первичного двигателя, первый вход нелинейного блока сравнения подключен к выходу датчика активной мощности, а его второй вход - к введенному блоку задания уровня ограничения, при этом выход интегратора подключен к входу блока импульсно- фазового управления выпрямительно-инвер- торного преобразователя.
5
0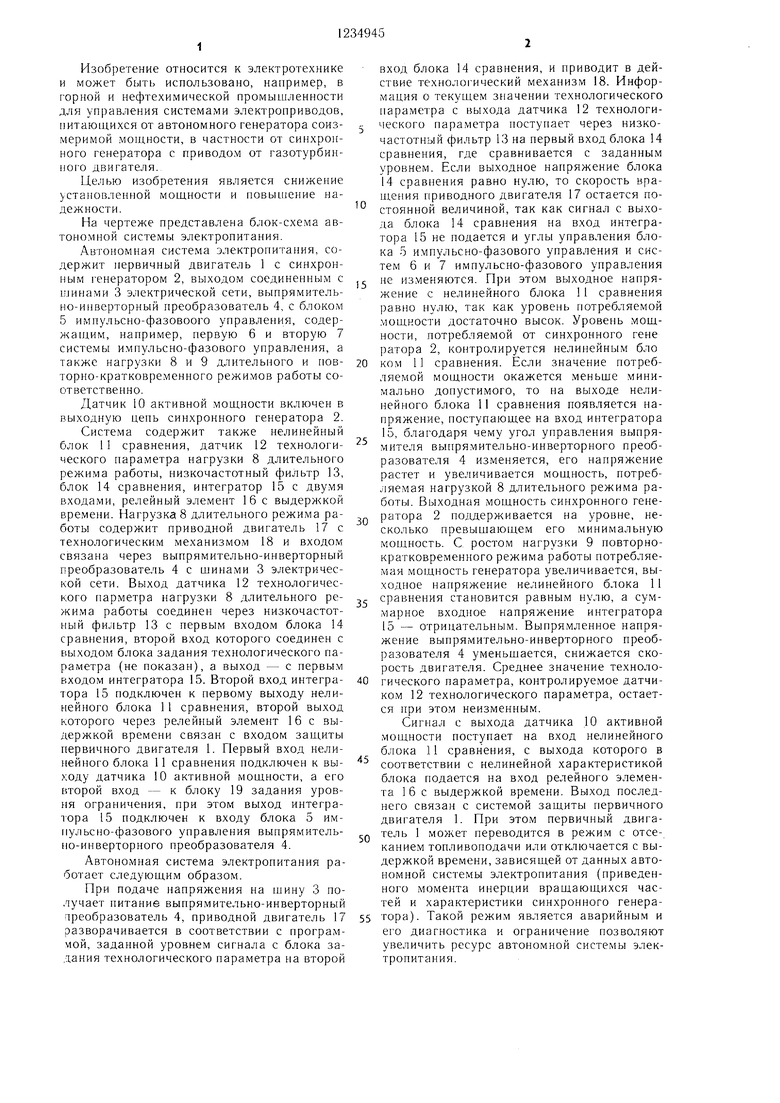

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 2016 |
|
RU2681839C1 |
| Способ управления непосредственным преобразователем частоты для регулируемого электропривода с широтно-импульсным регулированием (шир) выходного напряжения и непосредственный преобразователь частоты для регулируемого электропривода | 1978 |
|
SU858200A1 |
| Вентильный электродвигатель | 1984 |
|
SU1257770A1 |
| ГИБРИДНЫЙ КОМПЕНСАТОР ПАССИВНОЙ МОЩНОСТИ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2001 |
|
RU2187872C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2005 |
|
RU2310263C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2012 |
|
RU2506677C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2017 |
|
RU2668346C1 |
| Вентильный электродвигатель | 1984 |
|
SU1259428A1 |
| Тиристорный электропривод постоянного тока | 1978 |
|
SU771836A1 |
Изобретение относится к области электротехники и представляет собой автономную систему электропитания. Цель изобретения - снижение установленной мощности и повыщение надежности. Система электропитания содержит первичный двигатель 1 с синхронным генератором (СГ) 2, выходом соединенным с щинами питающей сети, вы- прямительно-инверторный преобразователь (ВИП) 4 с системами импульсно-фазового управления (СИФУ) 6,7 и нагрузки 8,9 длительного и повторно-кратковременного режимов работы соответственно. Нагрузка 8 через ВИГ1 4 соединена с питающей сетью и включает приводной двигатель 17 с технологическим механизмом 18. Система питания снабжена схемой управления нагрузкой 8 в функции выходной модности СГ 2, содержащей интегратор 15, выходом соединенный с входом СИФУ 6. Один вход интегратора 15 через датчик 12 технологического параметра, низкочастотный фильтр 13 и блок сравнения 14 соединен с выходом технологического механизма 18. Другой вход интегратора 15 соединен с одним из выходов нелинейного блока сравнения II, который други.м выходом через релейный элемент 16с выдержкой времени соединен с двигателем I. Один вход блока сравнения Г через датчик 10 активной мощности соединен с СГ 2, а его другой вход - с блоком 19 задания уровня ограничения. За счет регулирования нагрузки 8 с установленной мощностью, в 2-3 раза меньщей, чем .мощность СГ 2, происходит снижение колебаний активной мощности СГ 2 при его работе на нагрузку 9 и снижение действующего значения тока СГ 2. 1 ил. (Л to со со сд
| Онищенко Г | |||
| Б | |||
| и др | |||
| Специфика электропривода по схеме ТП-Д при питании от автономного источника соизмеримой мощности.-В кн.: Автоматизированный электропривод/Под ред | |||
| И | |||
| И | |||
| Петрова и др | |||
| Энергия, 1980, с | |||
| Дальномер | 1922 |
|
SU379A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ использования органических веществ из паров и воды получаемых при обезвоживании торфа | 1935 |
|
SU46530A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
