уальными в)водными реакторами 3, 4. аждый агрегат содержит соответЬтвен- но первый и второй выпрямители 5, 8, первый и второй инверторы 6, 9, первый и второй сглаживающие дроссели 7, 10. Управление первым и вторым выпрямителями осуществляется от независимых систем регулирования с контуром. регулирования скорости, содержащим датчик скорости 11 на валу двигателя, регулятор скорости 12, и с контуром регулирования тока, содержащим регуляторы 13, 14 тока первого и второго выпрямителей, первые входы которых связаны с выходом регулятора скорости, а вторые входы - соответственно с выходами датчиков 15, 16. Выходы
регуляторов 13, 14 соединены с выходами систем 17, 18 импульсно-фазово- го управления выпрямителями. Управление инверторами осуществляется от первой и второй систем 19, 20 импуль- сно-фазового управления инверторами. ВД дополнительно снабжен блоком 23 выделения электромагнитного момента, подключенным первым и вторьм входом
Изобретение относится к электротехнике, в частности к вентильным электродвигателям повышенной мощности, питаемым от преобразователей частоты со звеном постоянного тока, и может быть использовано в системах электропривода различных производственных механизмов при питании от источника соизмеримой мощности.
/Цель изобретения - уменьшение .. пульсаций вращающего момента двигателя и уменьшение искажений питакнцего напряжения.
На фиг.1 представлена блок-схема вентильного электродвигателяj на фиг,2 - схема блока ввделения громагяитного момента; на фиг.3 - схема блока определения амплитуды изменения момента на фиг.4 - линейные диаграьмы формирования момента; на фиг.5 t схема датчика составляющих Тока; на фиг.6 - функциональная схема блока формирования углов опережения, на фиг.7 - векторная диаграмма.
к датчикам 24, 25 мгновенных значений напряжения инверторов, третьим входом - к выходу датчика 11, четвертым входом - к выходу датчика полного тока статора синхронной машины, пятым и шестым - к выходам датчиков 15, 16. Выход блока 23 соединен с входом блока 26 выделения амплитуды колебаний электромагнитного момента, выход которого соединен с входом блока 27 нелинейности с з.оной кечувствительно- сти, выход которого соединен с одним из входом системы 19. Первый выход датчика 28 полного тока двигателя соединен с входом датчика 29 статического тока, второй вход - с входом датчика 30 динамического тока двигателя, а третий - с одним из входов блока 23. Вход блока 31 формирования угла управления инверторами связан с выходом датчика 29, а два выхода - с входами систем 19, 20, При ограниченной мощности сети мощность двигателя может быть увеличена примерно вдвое без каких-либо дополнительных устройств. 7 ил„
Вентильный электродвигатель со звеном постоянного тока состоит из синхронной машины 1 с независимым возбзгждением, подключенной к питающей
сети 2 через два параллельно соединенных выпрямительно-инверторных агрегата с индивидуальными вводными реакторами 3 и 4. Первый выпрямительно- инверторный агрегат содержит первый
выпрямитель 5, первый инвертор 6, перкынь сглаживающий дроссель 7. Второй выпрямительно-инверторный агрегат содержит второй выпрямитель 8 второй инвертор 9 и второй сглаживающий дродроссель 10.
Управление первым и вТорым выпрямителями осуществляется от независи- мых систем регулирования с подчиненными контурами тока и скорости. Контур регулирования скорости включает датчик 11 скорости на валу двигателя и регулятор 12 скорости. Заданная скорость соответствует напряжению от независимого источника, поступающему
на второй вход регулятора скорости. .
В контур регулирования тока входя регуляторы 13 и 14 тока первого.и второго вьтрямителей, первые входы которых связаны с выходом регулятора скорости, а вторые входы - соответственно с выходами датчиков 15 и 16 тока второго и первого выпрямителей Выходы регуляторов 13 и 14 тока сое- динены с выходами систем 17 и 18 им- пульсно-фазового управления выпрями- .
Управление инверторами осуществляется от первой 19 и второй 20 систем ймпульсно-фазового управления инверторами. Системы импульсно-фазового управления синхронизированы напряжением статора с помощью блока 21 синхронизации инверторов, датчика 22 положения ротора, Синхронизация осуществляется известным способом: на малой скорости - с помощью датчика положения, а на скорости, достаточной для естественной коммутации, - с по- мощью напряжения на зажимах синхронной машины.
В вентильный электродвигатель со звеном постоянного тока введены также блок 23 выделения злектромагнитного момента вентильного двигателя, подключенный перв| & и вторым входами к датчикам 24 и 25 мгновенных значений напряжения инверторов, третьим входом - к выходу датчика 11 скорости, четвертым входом - к выходу датчика полного тока статора синхронного двигателя, пятым и шестым - к выходам блоков 1 и 16. Выход блока 23 соединен с входом блока. 26 выделения амплитуды колебаний электромагнитного момента, выход которого соединен с входом бйока 27 нелинейности с зоной нечувствительности, выход которого соединен с одним из входов системы 19. Первый выход датчика 28 полного тока Двигателя соединен с входом датчика 29 статического тока, второй выход - с входом датчика 30 динамического тока двигателя, а третий - с одним из входов блока 23 выделения электромагнитного момента.
Вход блока 31 формирования угла управления инверторами связан с вы- ходом датчика 29 статического то;ка, а два выхода - с входами систем 19 и 20 управления инверторами.
5 ю
15 0 5
0
5
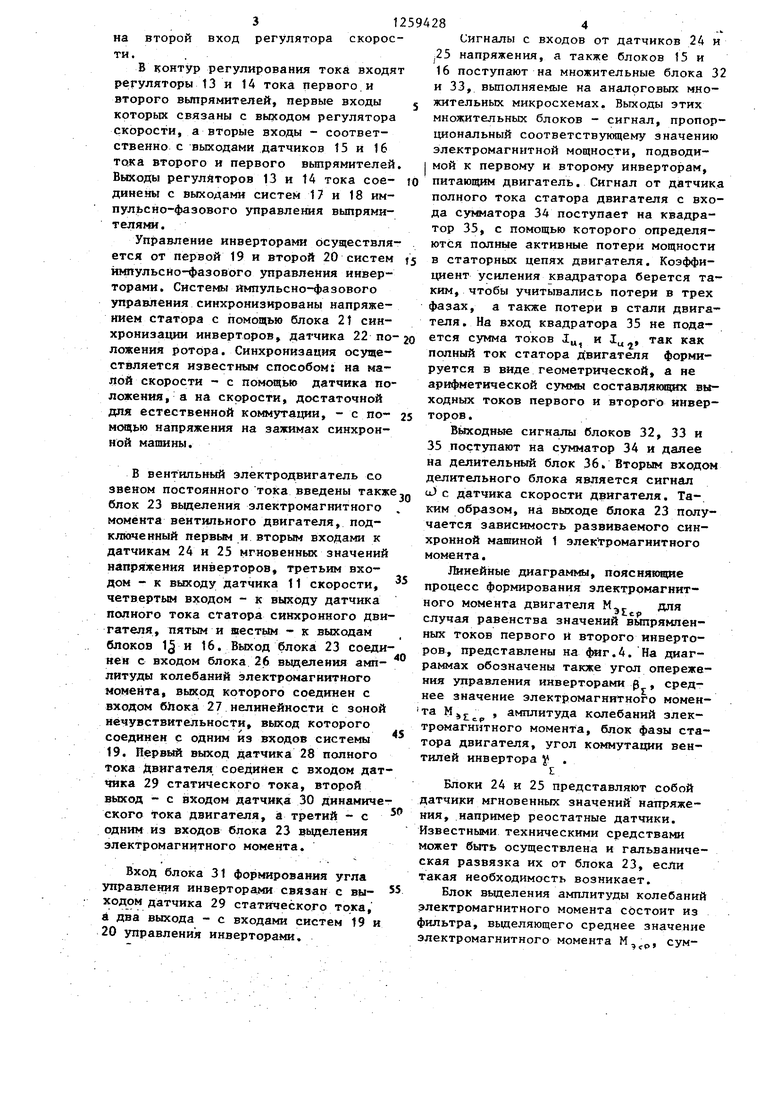
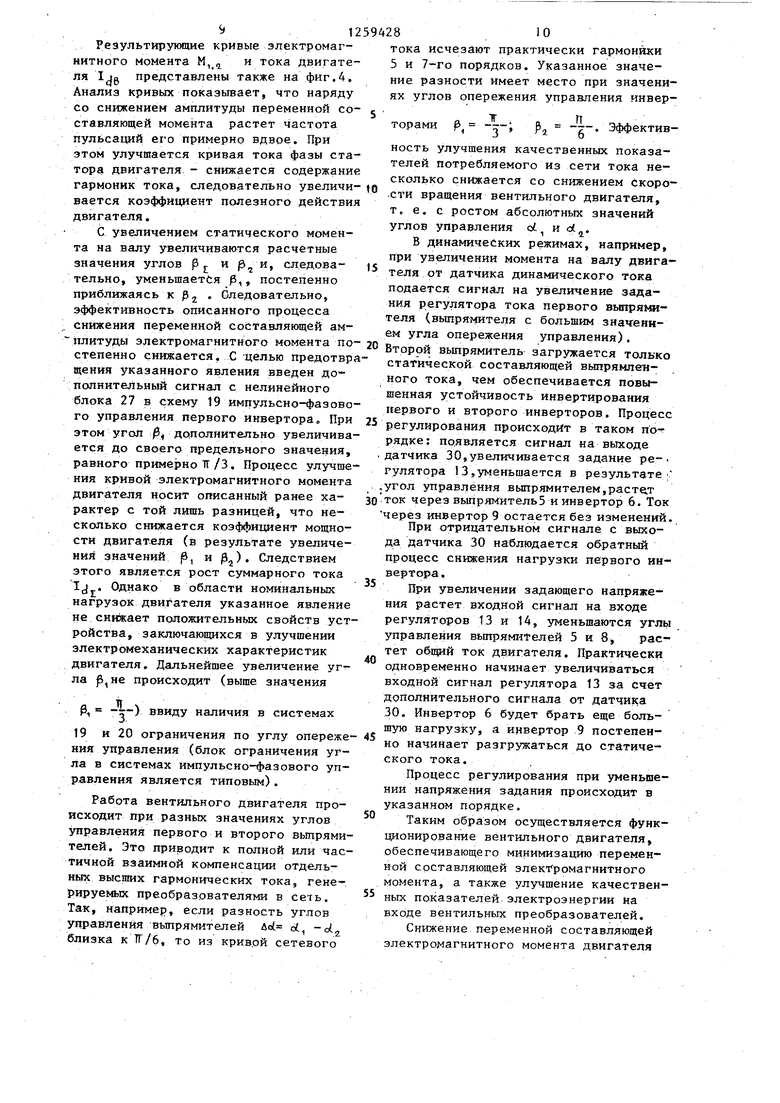
Сигналы с входов от датчиков 24 и ,25 напряжения, а также блоков 15 и 16 поступают на множительные блока 32 и 33, вьmoлняe fi,Ie на аналоговых множительных микросхемах. Выходы этих множительных блоков - сигнал, пропорциональный соответствункцему значению электромагнитной мощности, подводи- 1 мой к первому и второму инверторам, питающим двигатель. Сигнал от датчика полного тока статора двигателя с входа су1« атора 34 поступает на квадратор 35, с помощью Которого определяются полные активные потери мощности в статорных цепях двигателя. Коэффициент усиления квадратора берется таким, чтобы учитывались потери в трех фазах, а также потери в стали двигателя. На вход квадратора 35 не подается сумма токов 1ц и 1ц,, так как полный ток статора двигателя формируется в виде геометрической, а не арифметической суммы составляю1р1х выходных токов первого и второго инверторов .
Выходные сигналы блоков 32, 33 и 35 поступают на сумматор 34 и далее на делительный блок 36, Вторым входом делительного блока является сигнал CL) с датчика скорости двигателя. Та-. КИМ образом, на выходе блока 23 получается зависимость развиваемого синхронной машиной 1 электромагнитного момента.
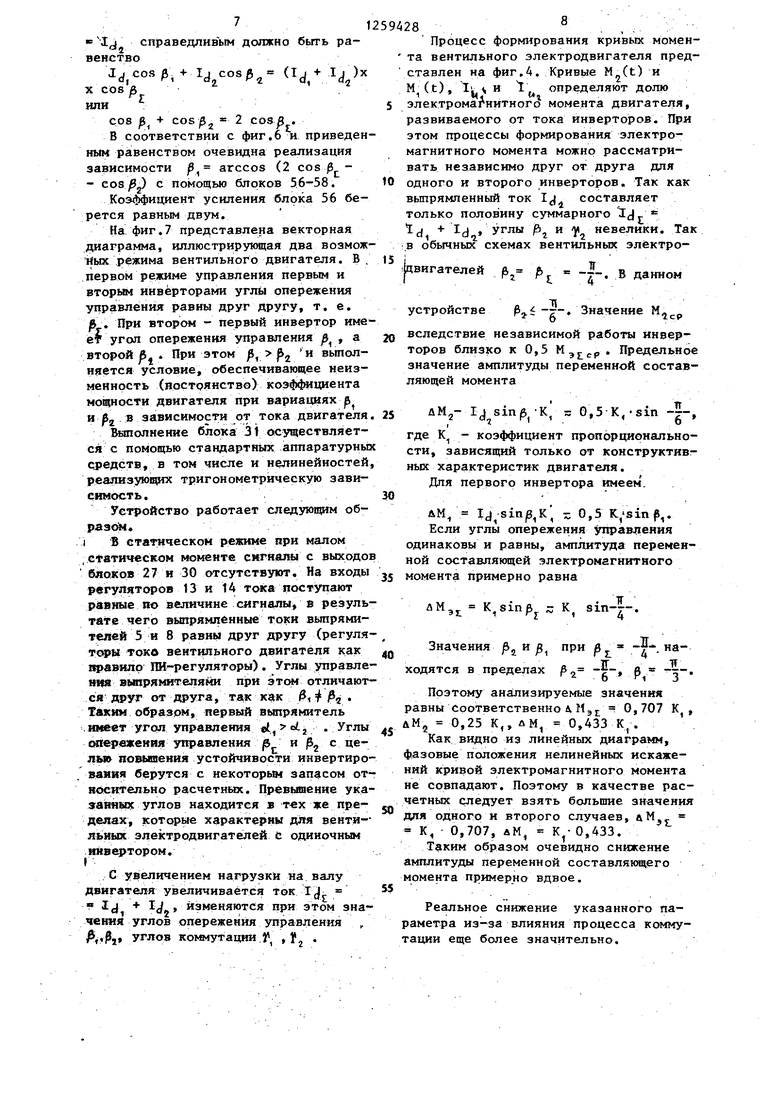
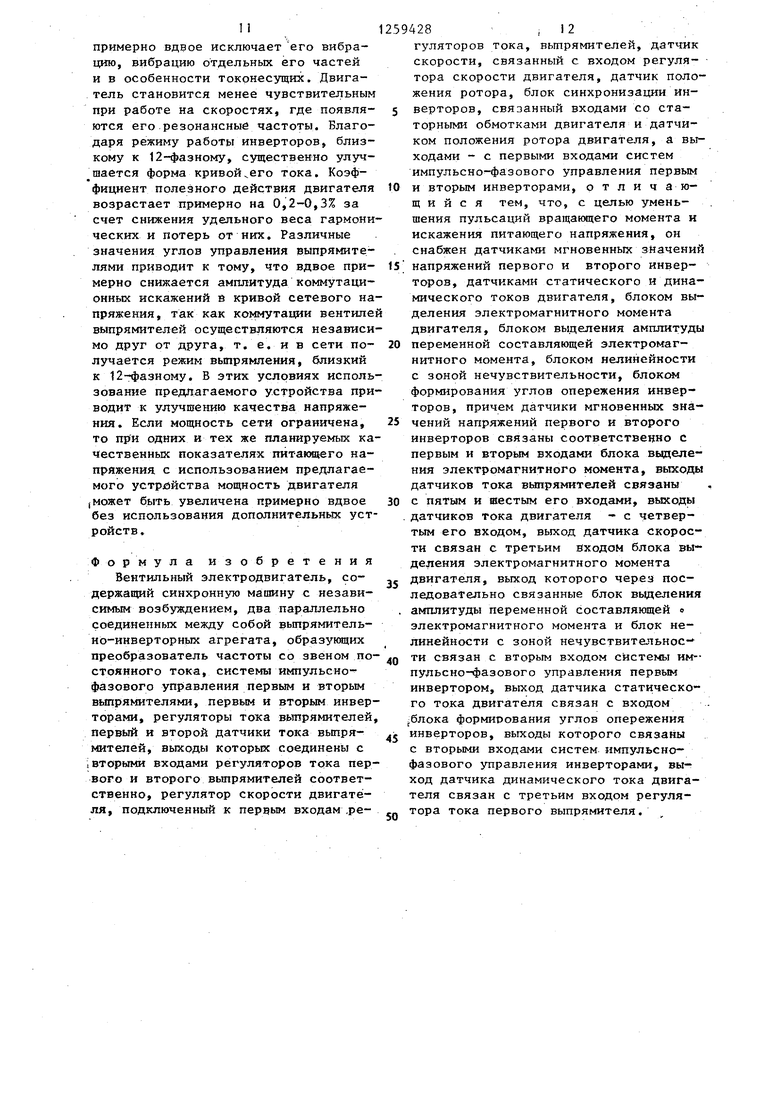
Линейные диаграм1«, поясняющие процесс формирования электромагнитного момента двигателя М для
f-f-p
случая равенства значений выпрямленных токов первого И второго инверторов, представлены на фиг.4. На диаграммах обозначены также угол опережения управления инверторами р , среднее значение электромагнитного момен та М
si.
амплитуда колебаний электромагнитного момента, блок фазы статора двигателя, угол коммутации вентилей инвертора у .
Е
Блоки 24 и 25 представляют собой датчики мгновенных значений напряжения, например реостатные датчики. Известньми техническими средствами может быть осуществлена и гальваническая развязка их от блока 23, есЛи такая необходимость возникает.
Блок выделения амплитуды колебаний электромагнитного момента состоит из фильтра, выделяющего среднее значение электромагнитного момента М.р, сумматора, на котором определяется разность между текущим значением элексоставляющей реализуется с помощью конденсатора 45, резистора 46 и усилителя 47. Выход датчика 30 динамического тока соединен с третьим входом
J регулятора тока первого вьтрямителя. Выходы усилителей 48 и 49 являются выходами соответственно датчика статического и датчика полного токов. Выход датчика статического тока через
jq блок 31 формирования углов опережения инверторов связан с входами систем 19 и 20 импульсно-фазового управления .
Блок 31 (фиг.6) включает сумматотромагнитного момента М и его средним значением.
фильтр блока 26 содержит пассивный RG- или LC-фильтр 37 с выходным усилителем, обеспечивающим результирующий коэффициент.передачи 1} О, и сумматор 38. Выход блока 26 (вход сумматора 38) связан с блоком 27, представляюпщм собой нелинейность с зоной нечувствительности. Указанная нелинейность является типовой.
Величина зоны нечувствительности
блока 27 выбирается равной допустимо- ры 50 и 51, масштабные блоки 52 и 53, му значению амплитуды колебаний элек- нелинейные блоки 54 и 55, масштабный
Указанное
20
25
тромагнитиого момента. Указанное значение не может быть равно нулю, поскольку в схеме вентильного электродвигателя со звеном постоянного тока невозможно в принципе получить электромагнитный 4омент без пульсаций при конечном числе фаз статора двигателя . Максимум пульсаций электромагнитного момента и, следовательно, зо на нечувствительности должны получиться меньше максимума пульсаций момента вентильного двигателя при шестифазном инверторе и несколько значения, которое характерно.для двенадцатифаз- , ного инвертора (примерно в 1,8-2,3 раза меньше пульсаций при шестифазном инверторе).
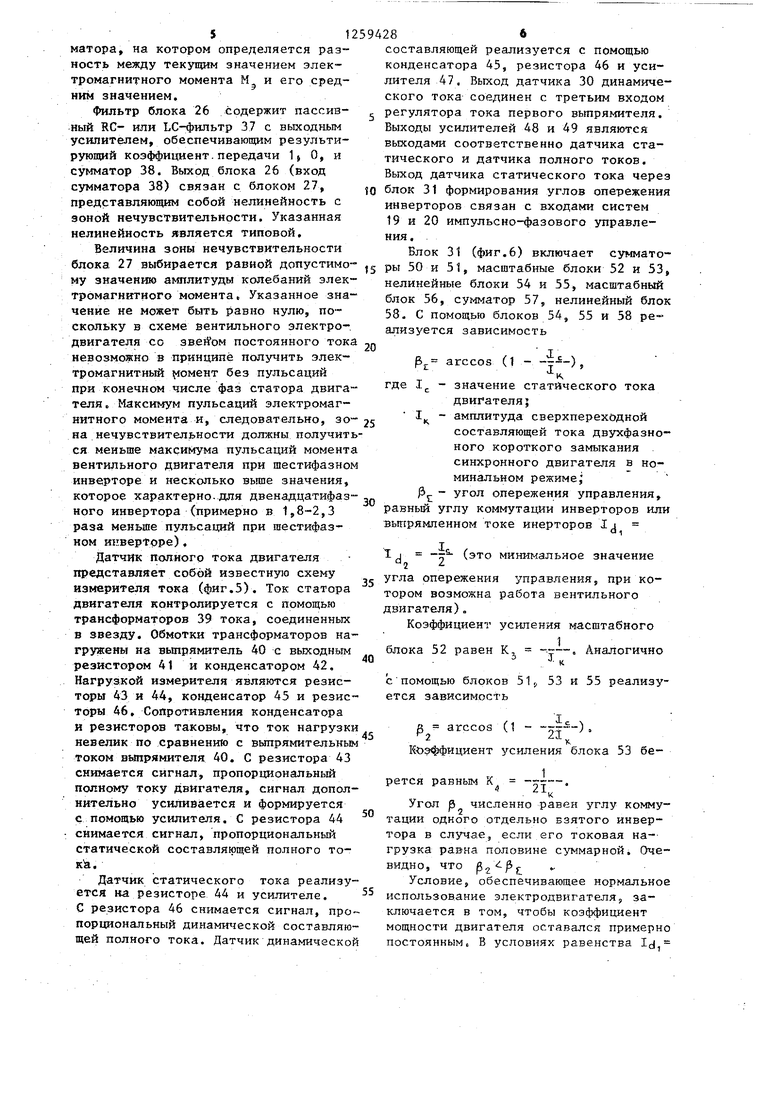
Датчик полногр тока двигателя представляет собой известную схему измерителя тока (фиг.5). Ток статора двигателя контролируется с помощью трансформаторов 39 тока, соединенных в звезду. Обмотки трансформаторов нагружены на вьшрямитель 40 с выходным резистором 41 и конденсатором 42. Нагрузкой измерителя являются резисторы 43 и 44, конденсатор 45 и резне™ торы 46. Сопротивления конденсатора и резисторов таковы, что ток нагрузки невелик по сравнению с выпрямительным током выпрямителя 40. С резистора 43 снимается сигнал, пропорциональный полному току двигателя, сигнал дополнительно усиливается и формируется с помощью усилителя. С резистора 44 : снимается сигнал, пропорциональный статической составляющей полного то- ка.,
Датчик статического тока реализуется ка резисторе 44 и усилителе. С резистора 46 снимается сигнал, пропорциональный динамической составляющей полного тока. Датчик динамической
40
блок 56, сумматор 57, нелинейный блок 58. С помощью блоков 54, 55 и 58 реализуется зависимость
arccos (1 - ---),
где 1 - значение статического тока
двигателя; 1 - амплитуда сверхпереходной
составляющей тока двухфазно- ного короткого замыкания синхронного двигателя в номинальном режиме; J3 - угол опережения управления, равный углу коммутации инверторов или выпрямленном токе инерторов 1
I J (это минимальное значение
2
угла опережения управления, при котором возможна работа вентильного двигателя).
Коэффициент усиления масштабного
блока 52 равен К ---. Аналогично
с помощью блоков 5 ется зависимость
I
53 и 55 реализу45
и arccos 2
( )
V 9Т ° К
КЪ9ФФициент усиления блока 53 берется равным
1 .„„.
Угол р численно равен углу коммутации одного отдельно взятого инвертора в случае, если его токовая на-- грузка равна половине суммарной. Очевидно, что
Условие, обеспечивающее нормальное использование электродвигателя, заключается в том, чтобы коэффициент мощности двигателя оставался примерно постоянным В условиях равенства Id,
составляющей реализуется с помощью конденсатора 45, резистора 46 и усилителя 47. Выход датчика 30 динамического тока соединен с третьим входом
регулятора тока первого вьтрямителя. Выходы усилителей 48 и 49 являются выходами соответственно датчика статического и датчика полного токов. Выход датчика статического тока через
блок 31 формирования углов опережения инверторов связан с входами систем 19 и 20 импульсно-фазового управления .
Блок 31 (фиг.6) включает сумматоры 50 и 51, масштабные блоки 52 и 53, нелинейные блоки 54 и 55, масштабный
0
5
блок 56, сумматор 57, нелинейный блок 58. С помощью блоков 54, 55 и 58 реализуется зависимость
arccos (1 - ---),
где 1 - значение статического тока
двигателя; 1 - амплитуда сверхпереходной
составляющей тока двухфазно- ного короткого замыкания синхронного двигателя в номинальном режиме; J3 - угол опережения управления, равный углу коммутации инверторов или выпрямленном токе инерторов 1
I J (это минимальное значение
2
угла опережения управления, при котором возможна работа вентильного двигателя).
Коэффициент усиления масштабного
блока 52 равен К ---. Аналогично
I
с помощью блоков 5 ется зависимость
53 и 55 реализу
и arccos 2
( )
V 9Т ° К
КЪ9ФФициент усиления блока 53 берется равным
1 .„„.
Угол р численно равен углу коммутации одного отдельно взятого инвертора в случае, если его токовая на-- грузка равна половине суммарной. Очевидно, что
Условие, обеспечивающее нормальное использование электродвигателя, заключается в том, чтобы коэффициент мощности двигателя оставался примерно постоянным В условиях равенства Id,
справедливым должно быть ,
венство
Д. + Ij COS, X COS jg
или
COS + COS 2 2 COS
в соответствии с фиг.6 и приведенным равенством очевидна реализация зависимости , arccos (2 cos и - - с помощью блоков 56-58,
Коэм)фициент усиления блока 56 берется равным двум.
На фиг.7 представлена векторная диаграмма, иллюстрирующая два возможных режима вентильного двигателя. В. первом режиме управления первым и 8торю4 инверторами углы опережения управления равны друг другу, т. е. . При втором - первый инвертор име ёт угол опережения управлениям , а второй.. При этом JB, 2 выполняется условие, обеспечивающее неизменность (яостоянство) коэффидаента мощности двигателя при вариациях р ив- в зависимости от тока двигателя.
Выполнение блока 31 осуществляется с помощью стандартных аппаратурных средств, в том числе и нелинейностей, реализующих тригонометрическую зависимость.
Устройство работает следуюпрт об- .
I В статическом режиме при малом статическом моменте сигналы с выходов блоков 27 и 30 отсутствуют. На входы регуляторов 13 и 14 тока поступают равные по величине сигналы в результате чего выпрямленные токи выпрямителей 5 и 8 равны друг другу (регуляторы токо вентильного двигателя как 1фавилр ПИ регуляторы). Углы управлений ви1рямителями при этом отличаются друг от друга, так KZtK i j8,j . Таким образом, первый вьщрямитель .имеет угол управления ., .Углы онережекйя управления и р с цель повышения устойчивости инвертирования берутся с некоторым запасом от- яосительно расчетных. Превьввение указанных углов находится в т«х же ире делах, которые характерны для венти- льиых здектродвигателей с одиночным инвертором. .
С увеличением нагрузки на валу
двигателя увеличивается ток 1(|. « Ijj + IJ , изменяются при этом значения углов опережения управления , ,tPi углов коьвлутации У ,У .
1
1259428 . , :
Процесс формирования кривых момен- та вентильного электродвигателя пред
ставлен на фиг,А. Кривые М„(1) и М,(€), 1
определяют долю
1 - ч« г
электромагнитного момента двигателя,
развиваемого от тока инверторов. При этом процессы формирования электро- магнитного мсдаента можно рассматривать независимо друг от друга для одного и второго инверторов. Так как выпрямпенный ток Ij составляет только половину суммарного J j d d f Эг и У невелики. Так в обычных схемах вентильных электро
,
тг
А
данном
устройстве
-I-.
Значение М,
.. . -..
вследствие независимой работы инверторов близко к 0,5 M,j.p . Предельное значение амплитуды переменной составляющей момента
г 0,5-К,, sin -|-,
где К, - коэффициент пропорциональности, зависящий только от конструктивных характеристик двигателя, Для первого инвертора имеем .
ДМ/ , - 0,5 R, sinp,.
Если углы опережения управления одинаковы и равны, амплитуда переменной составляющей электромагнитного момента примерно равна
Q j
5
лМ
тг
31
;с К sin-|-. Значения J5j и ппм а -5 2,
ходятся в пределах
при
д -1- Рг А
на: Ч ft - -1.6 Г 3 Поэтому анализируемые значения равны Соответственно Н, . О, 707 К , лМ, 0,25 К,, лм, 0,433 К,.
Как видно из линейных диаграмм, фазовые положения нелинейных искажений кривой электромагнитного момента не совпадают. Поэтому в качестве расчетных следует взять большие значения для одного и второго случаев, лМ, К, 0,707, AM, 0,433.
Таким образом очевидно снижение амплитуды переменной составляющего момента примерно вдвое,
Реальное снижение указанного параметра из-за влияния процесса коммутации еще более значительно.
зя
Результирующие кривые электромагнитного момента М, и тока двигателя Ija представлены также на фиг.4. Анализ кривых покаэьгеает, что наряду со снижением амплитуды переменной со- j ставляющей момента растет частота пульсаций его примерно вдвое. При этом улучшается кривая тока фазы статора двигателя - снижается содержание гармоник тока, следовательно увеличи-to вается коэффициент полезного действия двигателя.
С увеличением статического момента на валу увеличиваются расчетные значения углов р j. и Э, и, следовательно, уменьшается р,, постепенно приближаясь к Эг Следовательно, эффективность описанного процесса снижения переменной составляющей амтока исчезают практически гармоники 5 и 7-го порядков. Указанное значение разности имеет место при значениях углов опережения управления инверторами
,,- -
f. -b
эффективность улучшения качественных показателей потребляемого из сети тока несколько снижается со снижением Скоро- сти вращения вентильного двигателя, т. е. с ростом абсолютных значений углов управления ot и ot,
В динамических режимах, например, при увеличении момента на валу двигателя от датчика динамического тока подается сигНсШ на увеличение задания регулятора тока первого выпря ш- теля (вьшрянителя с большим значением угла опережения управления), плитуды электромагнитного момента по- 20 Второй выпрямитель загружается только степенно снижается, С целью предотвра- статической составляющей выпрямлен15
щения указанного явления введен дополнительный сигнал с нелинейного блока 27 в схему 19 импульсно-фазово- го управления первого инвертора. При 25 этом угол Д, дополнительно увеличивается до своего предельного значения, равного примерно ТГ /3. Процесс улучшения кривой электромагнитного момента двигателя носит описанный ранее характер с той лишь разницей, что несколько снижается коэффициент мощности двигателя (в результате увеличения значений j3, и ,j). Следствием этого является рост суммарного тока Ij . Однако в области номинальных нагрузок двигателя указанное явление не снижает положительньк свойств устройства, заключаюпщхся в улучшении электромеханических характеристик двигателя. Дальнейшее увеличение ла ,не происходит (выше значения
35
него тока, чем обеспечивается повышенная устойчивость инвертирования первого и второго инверторов. Процесс регулирования происходит в таком по рядке; появляется сигнал на выходе .датчика 30,увеличивается задание ре-. гулятора 13 уменьшается в результате; ..угол управления выпрямителем,растет Зо ток через выпрямительЗ и инвертор 6. Ток
через инвертор 9 остается без изменений.
При отрицательном сигнале с выхода датчика 30 наблюдается обратный процесс снижения нагрузки первого инвертора.
При увеличении задающего напряже ния растет входной сигнал на входе регуляторов t3 и 14, уменьшаются углы управления выпрямителей 5 и 8, растет общий ток двигателя. Практически одновременно начинает увеличиваться входной сигнал регулятора 13 за счет дополнительного сигнала от датчика 30. Инвертор 6 будет брать еще большую нагрузку, а инвертор 9 постепенно начинает разгружаться до статического тока.
40
Т V
Тввиду наличия в системах и 20 ограничения по углу опереже
Э.
19
ния управления (блок ограничения угла в системах импульсно-фазового управления является типовым).
Работа вентильного двигателя происходит при разных значениях углов управления первого и второго выпрямителей. Это приводит к полной или частичной взаимной компенсации отдельных высших гармонических тока генерируемых преобразователяш в сеть. Так, например, если разность углов управления выпрямителей ДЫ ot, -ot близка к F/6, то из кривой сетевого
тока исчезают практически гармоники 5 и 7-го порядков. Указанное значение разности имеет место при значениях углов опережения управления инверторами
,,- -
f. -b
эффектив25
35
45
него тока, чем обеспечивается повышенная устойчивость инвертирования первого и второго инверторов. Процесс регулирования происходит в таком по рядке; появляется сигнал на выходе .датчика 30,увеличивается задание ре-. гулятора 13 уменьшается в результате; ..угол управления выпрямителем,растет Зо ток через выпрямительЗ и инвертор 6. Ток
через инвертор 9 остается без изменений
При отрицательном сигнале с выхода датчика 30 наблюдается обратный процесс снижения нагрузки первого инвертора.
При увеличении задающего напряже ния растет входной сигнал на входе регуляторов t3 и 14, уменьшаются углы управления выпрямителей 5 и 8, растет общий ток двигателя. Практически одновременно начинает увеличиваться входной сигнал регулятора 13 за счет дополнительного сигнала от датчика 30. Инвертор 6 будет брать еще большую нагрузку, а инвертор 9 постепенно начинает разгружаться до статического тока.
Процесс регулирования при уменьшении напряжения задания происходит в указанном порядке.
Таким образом осуществляется функционирование вентильного двигателя, обеспечивающего минимизацию переменной составляющей электромагнитного момента, а также улучшение качествен- ных показателей электроэнергии На входе вентильных преобразователей.
Снижение переменной составляющей электромагнитного момента двигателя
40
50
n
примерно вдвое исключает его вибрацию, вибрацию отдельных его частей и в особенности токонесущих. Двигатель становится менее чувствительным при работе на скоростях, где появляются его резонансные частоты. Благодаря режиму работы инверторов, близкому к 12-фазному, существенно улуч- шается форма кривой его тока. Коэффициент полезного действия двигателя возрастает примерно на 0,2-0,3% за счет снижения удельного веса гармонических и потерь от них. Различные значения углов управления выпрямителями приводит к тому, что вдвое примерно снижается амплитуда коммутационных искажений s кривой сетевого напряжения, так как коммутахщи вентиле выпрямителей осуществляются независимо друг от друга, т. е. и в сети получается режим вьтрямления, близкий к 12-фазному. В этих условиях использование предлагаемого устройства приводит к улучшению качества напряжения. Если мощность сети ограничена, то при одних и тех же планируемых ка ч(ественных показателях питающего напряжения с использованием предлагаемого устройства мощность двигателя jможет быть увеличена примерно вдвое без использования дополнительных устройств.
Формула изобретения
Вентильный электродвигатель, содержащий синхронную машину с независимым возбуждением, два параллельно соединенных между собой вьтрямитель- но-инверторных агрегата, образующих преобразователь частоты со звеном постоянного тока, системы импульсно- фазового управления первым и вторым выпрямителями, первьи и вторым инверторами, регуляторы тока вьтрямителей, первый и второй датчики тока вьтрямителей, выходы которых соединены с jвторыми входами регуляторов тока первого и второго вьтрямителей соответственно, регулятор скорости двигателя, подключенный к первым входам ,ре59428,12
гуляторов тока, выпрямителей, датчик скорости, связанный с входом регулятора скорости двигателя, датчик положения ротора, блок синхронизации ин- 5 верторов, связанный входами со ста- торными обмотками двигателя и датчиком положения ротора двигателя, а выходами - с первыми входами систем импульсно-фазового управления первым
0 и вторым инверторами, о т л и ч а ю- щ и и с я тем, что, с целью уменьшения пульсаций вращакмцего момента и искажения питающего напряжения, он снабжен датчиками мгновенных значений
5 напряжений первого и второго инверторов, датчиками статического и динамического токов двигателя, блоком выделения электромагнитного момента двигателя, блоком выделения амплитуды
0 переменной составляющей электромагнитного момента, блоком нелинейности с зоной нечувствительности, блоком формирования углов опережения инверторов, причем датчики мгновенных зна5 чений напряжений первого и второго инверторов связаны соответственно с первым и вторым входами блока выделения электромагнитного мсммента, выходы датчиков тока выпрямителей связаны ,
0 с пятым и шестым его входами, выходы . датчиков тока двигателя - с четвертым его входом, выход датчика скорости связан с третьим входом блока выделения электромагнитного момента
, двигателя, выход которого через последовательно связанные блок выделения . амплитуды переменной составляющей о электромагнитного момента и блок нелинейности с зоной нечувствительноеQ ти связан с вторым входом системы им-- пульсно- азового управления первым инвертором, выход датчика статическо го тока двигателя связан с входом блока формирования углов опережения
j инверторов, выходы которого связаны с вторыми входами систем импульсно- фазового управления инверторами, выход датчика динамического тока двигателя связан с третьим входом регуля тора тока первого выпрямителя.
23
2g
- - -f-1
(J/r f
I
г/./
T.M
y()
2УГ
ff .
7. /
f С t 4i4 M4x4Hx4tix |4
2 ft)
iLl
/y/ r(t)
7. / t
С 4
0
Ш
ФиеЛ
4:
/г.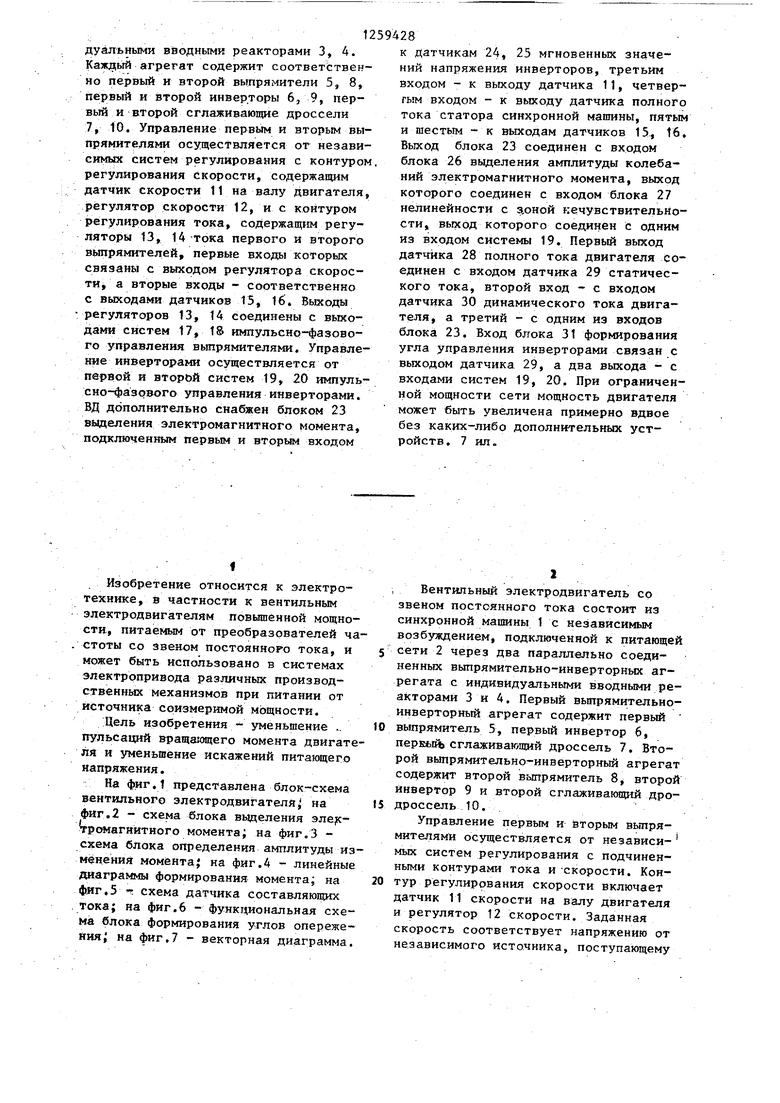
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Способ управления в зоне искусственной коммутации вентильным электродвигателем и устройство для его осуществления | 1986 |
|
SU1363390A1 |
| Устройство для управления реверсивным вентильным электродвигателем | 1981 |
|
SU1001415A1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| Вентильный электропривод | 1985 |
|
SU1300619A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1378003A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Вентильный электропривод | 1985 |
|
SU1274105A1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |

Изобретение относится к вентильным электродвигателям (БД) и может быть использовано в системах электропривода различных производственных механизмов при питании от источника соизмеримой мощности. Цель изобретения - уменьшение пульсаций вращающего момента двигателя и искажения питающего напряжения. ВД со звеном постоянного тока содержит синхронную машину 1с независимым возбуждением, подключенную к питающей сети 2 через два параллельно соединенных выпрями- тельно-инверторных агрегата с индиви- ЧЕВвМ УНг &}
иг. б
PeAaKtop A.iffiimicHHa
Составитель А.Санталов
Техред Л.Сердаокова Корректор М.Максимишинец,
Заказ 5135/55Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 7
| Вёнтгшьные двигатели и их приме- ,нение на электроподвижном составе / Под ред | |||
| Б.Н.Тиз менева.- М.: Транспорт, 1976, с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Л., 1983, с | |||
| Способ подпочвенного орошения с применением труб | 1921 |
|
SU139A1 |
