Данное техническое решение относится к электроприводам механизмов подъема и опускания груза грузоподъемных машин, работающих по схеме «первичный двигатель-генератор-электродвигатель-грузоподъемный механизм».
Более конкретно, под грузоподъемным механизмом понимается канатный механизм подъема и опускания груза, используемый в конструкциях грузоподъемных кранов.
Из практики известно, что при опускании груза грузоподъемным краном, работающим по упомянутой схеме, электропривод может работать в генераторном режиме с рекуперацией энергии в сеть. При отсутствии сети или других потребителей энергии основным приемником рекуперируемой энергии является синхронный генератор, который переходит в двигательный режим. Часть энергии рассеивается в виде потерь в синхронном генераторе, остальная часть энергии поступает на вал первичного двигателя, при этом разгружая его. Очевидно, что с увеличением массы опускаемого груза и скорости опускания мощность рекуперации возрастает. Известно, что первичный двигатель, например дизель, может принять лишь около 30% возвращаемой на его вал мощности от номинальной мощности первичного двигателя, а в случае превышения возвращаемой мощности, наступает неустойчивая работа первичного двигателя. При этом состояние первичного двигателя и его показатели мощности, включая частоту вращения вала и устойчивость работы, оказывают существенное влияние на стабильность работы связанного с ним электропривода грузоподъемной машины.
Существенным также для машин, работающих по указанной схеме, например, для грузоподъемных кранов с устройствами рекуперации потенциальной энергии, получаемой от движения вниз массы груза, является то, что получаемая энергия движения через механический привод крана и электродвигатель этого привода передается на генератор, а через вал генератора на вал первичного двигателя, при этом излишняя энергия, поступающая на вал первичного двигателя, может «опрокинуть» его или создать условия для его работы «вразнос». Это приводит к поломкам привода машины.
Другим известным существенным недостатком в работе электропривода по схеме двигатель-генератор-электродвигатель является опрокидывание инвертора тиристорного преобразователя со сквозным коротким замыканием якоря электродвигателя постоянного тока электропривода, причем это опрокидывание происходит при работе электропривода в условиях его торможения механизмом подъема груза при опускании груза, когда происходит переход с номинальной скорости опускания груза краном на пониженную скорость опускания груза. Данный эффект опрокидывания возникает при работе электропривода с питанием от сети ограниченной мощности, в частности от первичного двигателя (дизеля) через генератор. Причем опрокидывание инвертора не зависит от массы груза и от направления его движения (вверх-вниз), а возникает в момент, когда преобразователь переходит в инверторный режим.
Также является проблемным условие перерегулирования частоты вращения первичного двигателя при набросе и последующем сбросе нагрузки электропривода. Такое перерегулирование особенно проявляется при питании кранов от передвижных электростанций, имеющих быстродействующую защиту на основе микропроцессорных контроллеров. Причем эксплуатационный персонал, как правило, не имеет возможности (или не обладает достаточной квалификацией) изменить уставки защиты.
Следующей проблемой является резкое снижение частоты вращения первичного двигателя вплоть до его остановки при пуске электропривода в направлении подъема, когда на крюке грузоподъемного крана подвешен груз, близкий к номинальной грузоподъемности крана. Этот недостаток указывает на недостаточную мощность передвижной электростанции, от которой ведется питание грузоподъемного крана, или на неправильную настройку регулятора частоты вращения приводного двигателя.
Из патентной документации известен привод вертикального перемещения груза грузоподъемного крана, содержащий электродвигатель механизма подъема груза, подсоединенный через блок коммутации к источнику питания, дополнительный электродвигатель постоянного тока, кинематически связанный с аккумулятором механической энергии и электрически - с источником питания, блок растормаживания электродвигателя механизма подъема груза и развязывающие диоды, причем привод снабжен реле напряжения, обмотка которого подключена к источнику питания, резисторами, один из которых включен последовательно с обмоткой возбуждения дополнительного электродвигателя, которая посредством одного размыкающего контакта реле напряжения подключена параллельно его обмотке якоря, связанной с источником питания через один развязывающий диод, причем блок растормаживания электродвигателя привода подъема груза и его обмотка возбуждения через встречно включенные другие развязывающие диоды соединены соответственно с обмоткой якоря дополнительного электродвигателя непосредственно и через последовательно включенные другие размыкающие контакты реле напряжения и другой резистор - с электродвигателем механизма подъема груза [1].
В этом устройстве при нормальной работе привода аккумулятор накапливает механическую энергию, а в случае прекращении питания одного электродвигателя он отдает энергию, причем один из электродвигателей переходит в генераторный режим работы и питает обмотки тормоза и второго электродвигателя, что позволяет плавно опустить груз, поскольку второй электродвигатель начинает работать в режиме динамического торможения.
Известно устройство управления электроприводом по схеме генератор-двигатель механизма подъема крана, содержащее датчик нагрузки, исполнительное устройство, задатчик, систему управления, конечные выключатели и реостат в цепи возбуждения генератора, при этом устройство управления выполнено с корректором точности указателя с ограничителем веса груза [2].
Известен реверсивный тиристорный двухкомплектный электропривод постоянного тока, предназначенный для подъемных механизмов, содержащий двигатель смешанного возбуждения, сериесная обмотка которого включена последовательно с якорем через выпрямительный мост, причем параллельно якорю двигателя и соединенному с ним непосредственно, функционирующему в режиме спуска диоду выпрямительного моста включены соединенные последовательно диод и тормозной резистор [3].
Известно устройство для управления перемещением механизмов машин с приводами, например по схеме генератор - двигатель с возбудителем генератора, содержащее элемент задания, датчик величины управляемого параметра и орган сравнения, причем в нем применены в качестве элемента задания и датчика величины управляемого параметра, использованы фотоимпульсные датчики величины и направления перемещений задающего и управляемого валов, подключенные через синхронизатор импульсов к органу сравнения, выполненному в виде двоичного реверсивного счетчика импульсов с преобразователями прямого и обратного кодов записанного в счетчике числа в пропорциональные им напряжения, а к выходам указанных преобразователей подсоединены две встречно включенные обмотки возбудителя генератора [4].
Решаемой и достигаемой задачей данного технического решения является повышение надежности работы электропривода грузоподъемного крана путем исключения или существенного уменьшения влияния значения отдаваемой в питающую сеть рекуперируемой мощности как в статическом режиме работы электропривода, так и в переходных режимах работы электропривода.
Поставленная техническая задача решается устройством управления электроприводом механизма подъема и опускания груза грузоподъемного крана, которое содержит электродвигатель постоянного тока, соединенный с ним генератор, тиристорный выпрямитель, установленный в цепи питания электродвигателя, диод, соединенный с ним шунтирующий контактор, резисторы, соединенные с тиристорным преобразователем и контакторами динамического торможения, один из которых соединен с резистором, при этом диод соединен с якорем электродвигателя и тиристорным выпрямителем, шунтирующий контактор соединен с анодом и катодом диода, один контактор динамического торможения соединен с цепью якоря электродвигателя, другой резистор соединен с другим выводом якоря электродвигателя, тиристорный преобразователь соединен с генератором.
На фиг.1 показана принципиальная схема устройства управления электроприводом механизма подъема и опускания груза грузоподъемного крана.
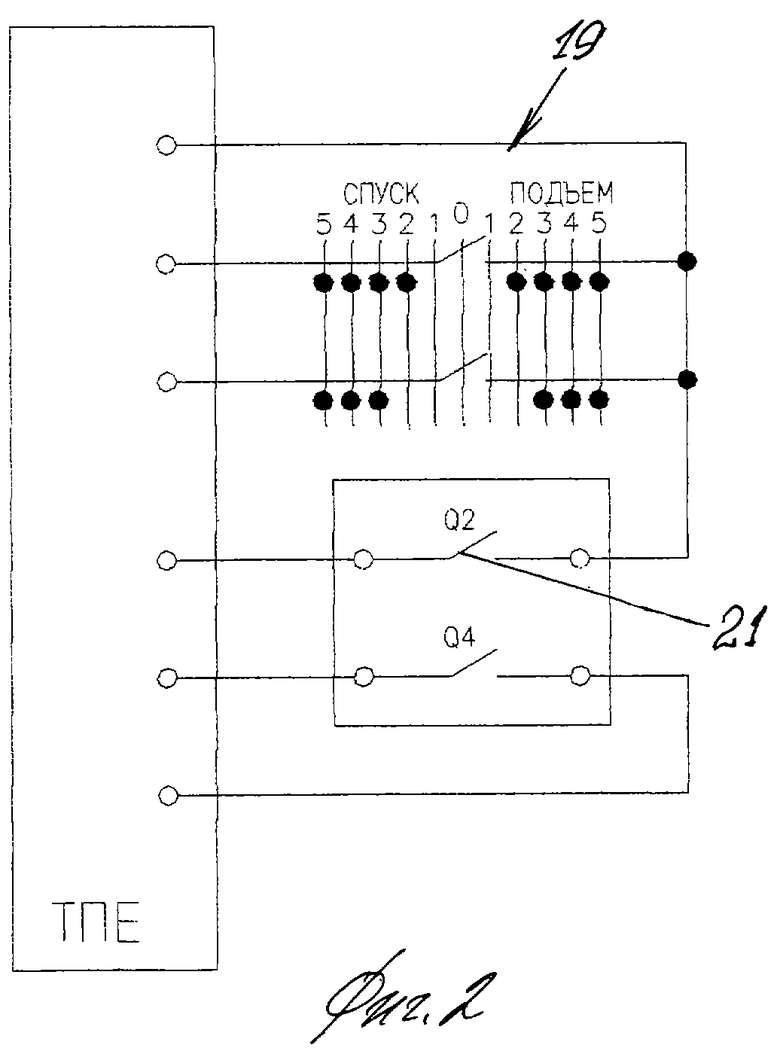
На фиг.2 - цепи задания скорости тиристорного выпрямителя электропривода механизма подъема и опускания груза.
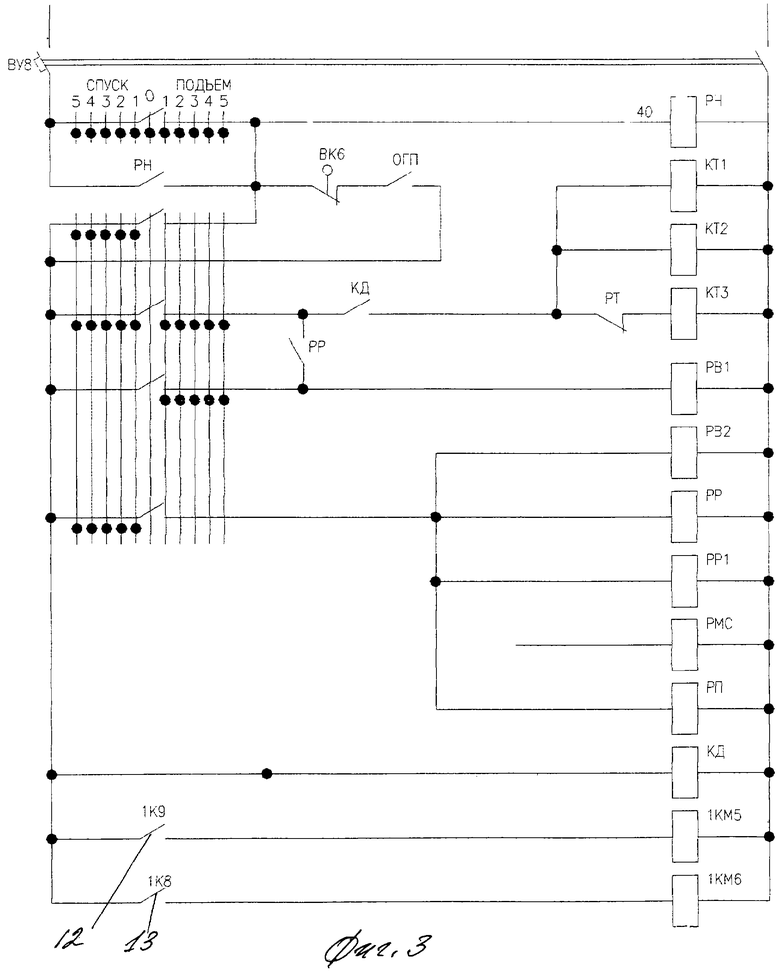
На фиг.3 - релейно-контакторная схема управления электроприводом механизма подъема и опускания груза.
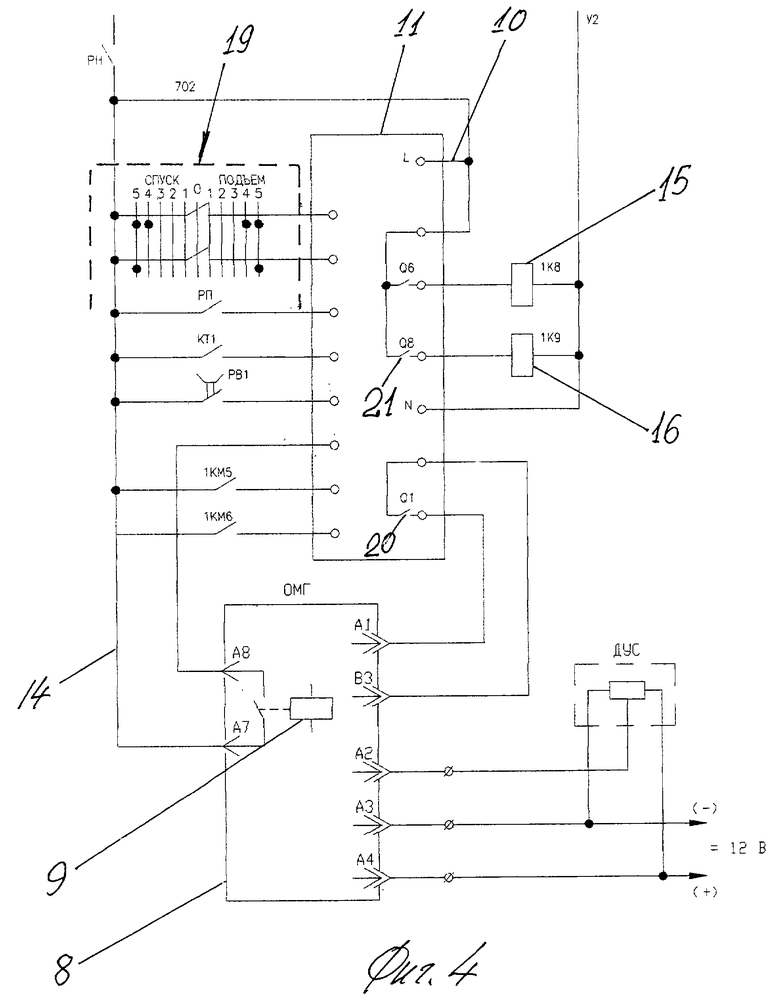
На фиг.4 - схема управления электроприводом.
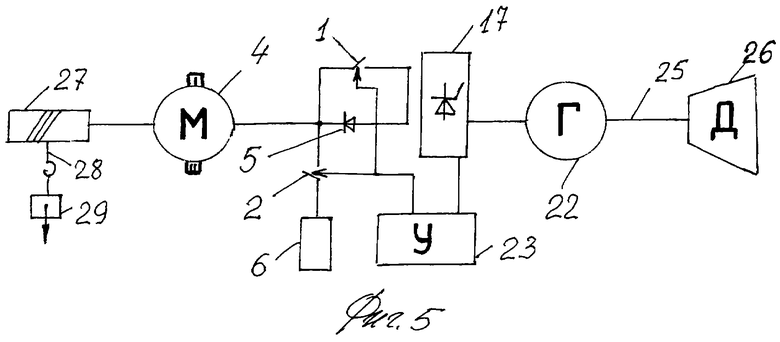
На фиг.5 - схема расположения устройства управления грузоподъемного крана.
Устройство (фиг.1) содержит включенные в цепь питания шунтирующий контактор 1 и и контакторы 2 и 3 динамического торможения, которые соединены с электродвигателем 4 постоянного тока. Цепь якоря электродвигателя соединена с выходом диода 5 и контактором 3 динамического торможения, при этом имеющий анод и катод диод 5 включен в цепь питания таким образом, что препятствует протеканию через него тока в режиме рекуперации энергии при торможении с большой скорости подъема на малую скорость подъема. В цепи контакторов 2 и 3 введены резисторы 6 и 7.
Устройство управления имеет подключенный к цепи его питания ограничитель 8 массы груза (фиг.4), реле 9 которого включено в цепь 10 логического входа программируемого контроллера 11.
Устройство (фиг.3) содержит контакты 12 и 13 пускателей. Реле 9 установлено в цепи 14. Устройство (фиг.4) содержит реле 15, выходное реле 16 и тиристорный выпрямитель 17 (фиг.1), работающий в выпрямительном режиме и отдающий электроэнергию от цепи 18 электропитания грузоподъемного крана на электродвигатель 4. Электропривод содержит командоконтроллер 19 (фиг.2), контакт 20 (фиг.4) программируемого контроллера 11 и контакт 21 выходного реле 16, а также другие элементы, которые находятся в электрической взаимосвязи с другими элементами, показанными на фиг.1-5, но которые не обозначены цифровыми позициями.
Электродвигатель 4 (фиг.5) введен в электропривод электрическим соединением с генератором 22 и механическим соединением с грузоподъемным механизмом. Электрически электродвигатель 4 соединен с генератором 22 через тиристорный преобразователь 17. На фиг.5 схематично показано устройство 23 управления электроприводом, в которое входят все вышеназванные элементы и связи между ними, кроме генератора 22. Устройство 23 управлениия с генератором 22 через тиристорный преобразователь 17 соединено электрической связью 24, при этом устройство 23 управления соединено с диодом 5 и контактором 2.
Генератор 22 установлен на валу 25 первичного двигателя 26 внутреннего сгорания. Грузоподъемный механизм представляет собой грузовую лебедку с барабаном 27, на котором посредством каната 28 подвешен груз 29.
Работает устройство следующим образом.
При подъеме груза шунтирующий контактор 1 и контакторы 2 и 3 динамического торможения разомкнуты. Включенный в цепь якоря электродвигателя 4 диод 5 препятствует протеканию тока в режиме рекуперации энергии при переходе с большой скорости движения груза на малую скорость его движения.
В направлении спуска груза диод 5 шунтируется замыканием контактора 1. В этом случае могут быть два варианта работы устройства.
Первый вариант - если груз тяжелый, то включается контактор 2 и включается резистор 6. В случае работы двигателя 4 в инверторном (генераторном) режиме потенциальная энергия от движения груза 29 вниз (фиг.5) преобразуется в электрическую энергию электродвигателем 4. Поскольку последний электрически соединен с генератором 22 через устройство 23 управления электроприводом, то при отдаче электродвигателем электрической энергии, в цепь питания электропривода, избыток электроэнергии преобразуется в тепловую энергию резистором 6. При этом исключается инверторный режим, когда энергия от электродвигателя 4 отдается в цепь электропитания крана.
Если груз легкий, то резистор 6 кратковременно подключается к двигателю 4 при переходе с большой скорости опускания груза на малую скорость его опускания, и энергия торможения гасится резистором 6 путем превращения электрической энергии в тепловую энергию. При этом подключение резистора 6 происходит при переключении командоконтроллера 19 (фиг.4) с позиции включения «5» на позицию включения «4» спуска груза.
Масса груза на крюке крана определяется ограничителем 8 массы груза (фиг.4), реле 9 которого срабатывает при грузе 0,5 от номинальной массы поднимаемого груза с выключенным контактом 20, а при включенном контакте 20, реле 9 ограничителя 8 массы груза срабатывает при грузе 0,25 от номинальной массы поднимаемого груза. Таким образом, при работе устройства управления электроприводом исключается:
- превышение возвращаемой мощности и вследствие этого неустойчивая работа приводного двигателя и электропривода в целом;
- «опрокидывание» приводного двигателя и создание условий для его работы «вразнос»;
- опрокидывание инвертора тиристорного преобразователя;
- перерегулирование частоты вращения приводного двигателя в условиях наброса и последующего сброса нагрузки при эксплуатации передвижных электростанций, имеющих быстродействующую защиту на основе микропроцессорных контроллеров;
- снижение частоты вращения приводного двигателя при отрыве груза от грузовой площадки, когда на крюке грузоподъемного крана подвешен груз, близкий к номинальной грузоподъемности крана.
Источники информации
1. SU 1299948 A1, 30.03.1987.
2. SU 528254, 15.09.1976.
3. SU 336756, 21.04.1972.
4. SU 218392, 17.05.1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Устройство для управления грузоподъемным механизмом | 1985 |
|
SU1384538A1 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИМПУЛЬСНО-КЛЮЧЕВЫМ КОММУТАТОРОМ | 2002 |
|
RU2249297C2 |
| Устройство для управления лебедкой | 1981 |
|
SU981196A1 |
| Электропривод для грузоподъемного механизма | 1979 |
|
SU860246A1 |
| УСТРОЙСТВО ИМПУЛЬСНО-КЛЮЧЕВОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2249296C2 |
Изобретение относится к электроприводам механизмов подъема и опускания груза грузоподъемных машин. Устройство содержит электродвигатель постоянного тока, тиристорный выпрямитель, диод, шунтирующий контактор, контакторы динамического торможения, резисторы. Тиристорный выпрямитель установлен в цепи питания электродвигателя и соединен с генератором. Диод соединен с тиристорным выпрямителем. Выход диода подключен к цепи якоря электродвигателя. Шунтирующий контактор шунтирует диод. Контакторы динамического торможения, в цепи которых введены резисторы, соединены с тиристорным выпрямителем и электродвигателем постоянного тока. Технический результат заключается в повышении надежности работы электропривода грузоподъемного крана. 5 ил.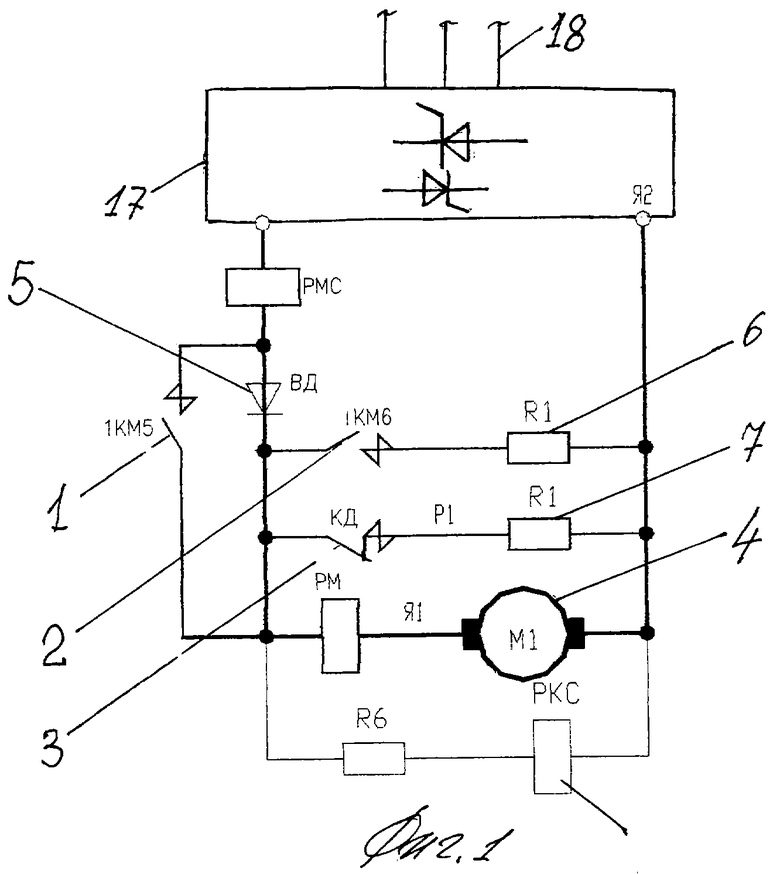
Устройство управления электроприводом механизма подъема и опускания груза грузоподъемного крана, содержащее электродвигатель постоянного тока, электрически соединенный с генератором, тиристорный выпрямитель, установленный в цепи питания электродвигателя и соединенный с генератором, диод, соединенный с тиристорным выпрямителем, причем выход диода подключен к цепи якоря электродвигателя, шунтирующий контактор, который шунтирует диод, контакторы динамического торможения, в цепи которых введены резисторы, соединенные с тиристорным выпрямителем, при этом контакторы динамического торможения соединены с электродвигателем постоянного тока.
| Устройство для управления электроприводом по системе "генератор-двигатель" механизма подъема крана | 1974 |
|
SU528254A1 |
| ЙСЕСОЮЗНАЯ I0--1 •^•?'аь'''«-3''-^ ^'1' ''• ^^^••''Т ".'ЛУ' Akliibu"!.;.:.,-,-^. тЩ^иЛИО'ТКА | 0 |
|
SU336756A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА КРАНА | 2002 |
|
RU2239277C2 |
| JP 2001163587 А, 19.06.2001. | |||

