Изобретение относится к устройст™ вам для сортировки руды.
Цель изобретения повышение точ™ кости сортирования.
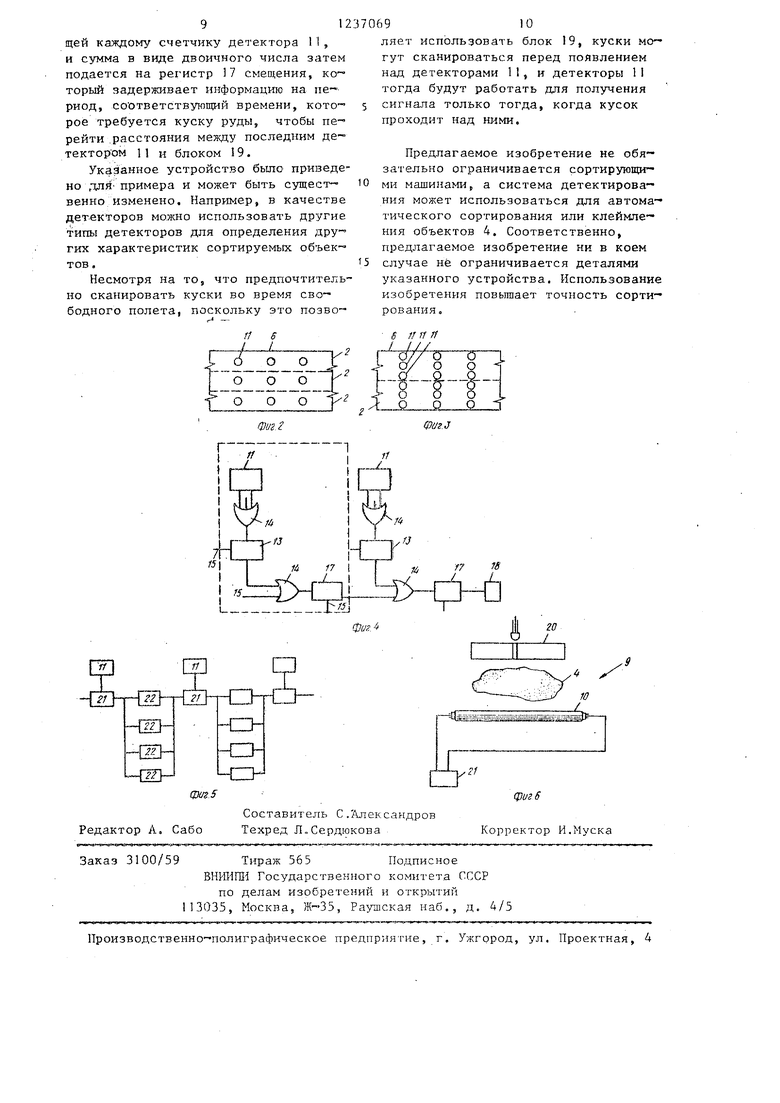
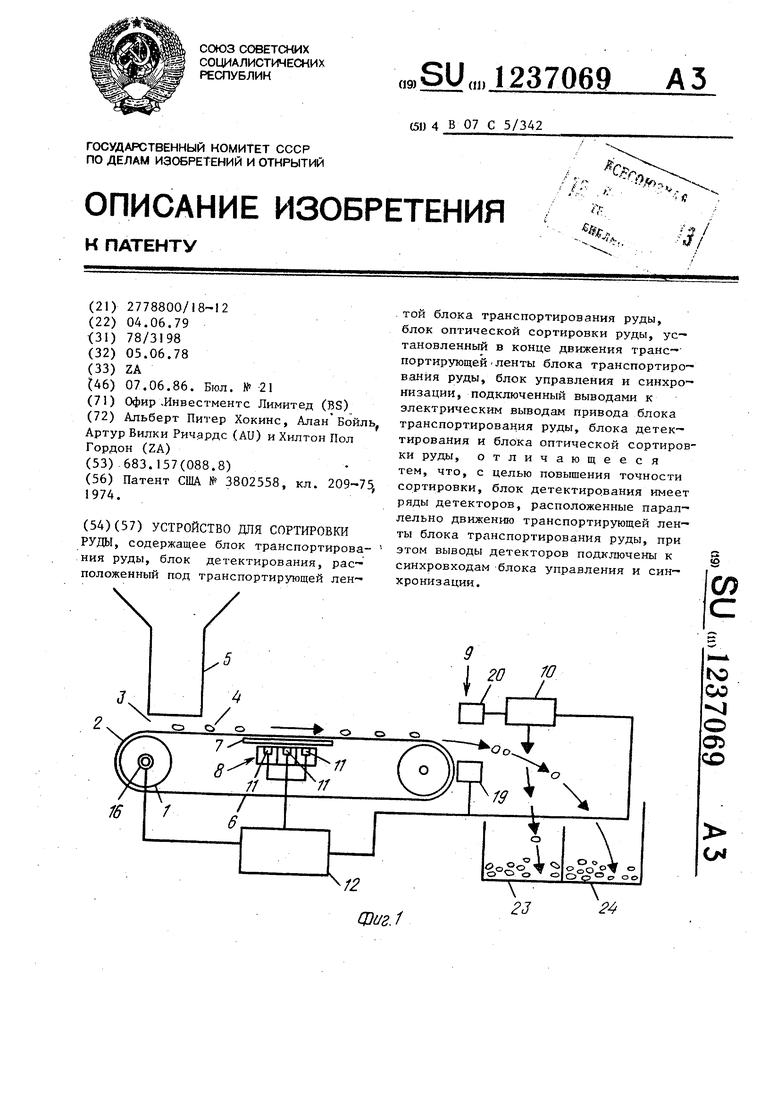
На фиг. 1 приведено устройство для сортировки руды, схематический вид; на фиг. 2 и 3 - альтернативные воплощения детекторов, встроенных в устройство, вид сверху; на фиг, 4-6 - схемы альтернативных воплощений стем обработки сигнала для получения окончательных результатов.
Устройство содержит ленточный конвейер 1 с транспортирующей лентой 2,
верхний пролет 3, на который подаются 15 большего размера, так,что не смогут
сортируемые объекты 4 из бункера 5, Объекты 4 переносятся верхним пролетом конвейера над стальной плитой 6, которая расположена над системой уп равления и анализа свойств руды.
Объекты 4 сбрасываются с переднего конца 7 ленточного конвейера так, чтрбы пролететь в свободном полете через поле оптического сканирования и за отклоняющим средством 8. Отклоняющее средство 8 может включать наборы форсунок воздушных струй, к которым подается сжатый воздух через воздушные клапаны, управляемые сигналами из анализатора сигналов. Анализатор сигналов получает входные сигналы от системы управления и тахометра скорости ленты и вырабатывает выходные сигналы, которые управляют воздушньоти клапанами отклоняющего средства 8 таким образом, что объекты, обладающие выбранной характеристикой, подвергаются ударному воздействию воздушных струй так, чтобы быть,отклоненными в собирающий бункер 9, в то время как отвергнутые объекты продолжают свободный полет в бункер некондиционных материалов. Устройство может быть использовано для сортировки кусков радиоактивной, руды. В этом случае оно включает некоторое количество элементов 10, чувствительных к сцинтилляции.
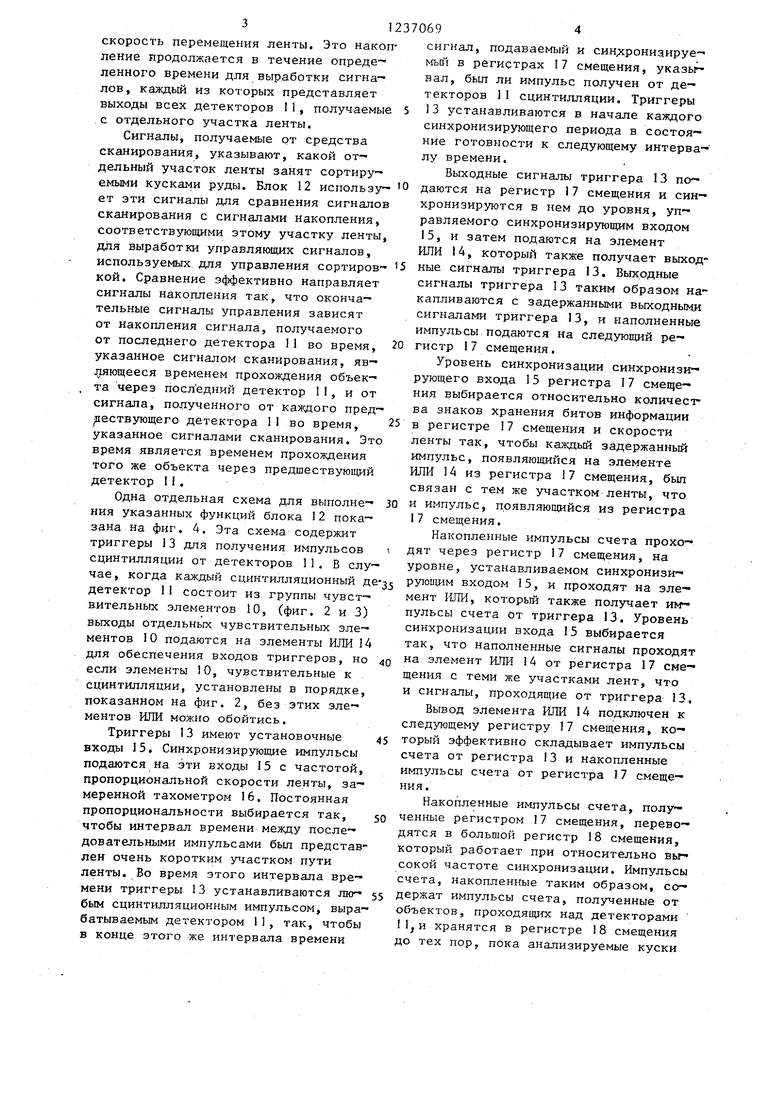
Элементы, чувствительные к сцинтилляции, реагируют на размер и радиоактивность сортируемых кусков. Таким образом, когда куски, подаваемые из бункера 5, в общем малы, это достигается предваритепьной операцией сортировки по размеру. Элементы, чувствительные к сцинтилляцииj могут быть установлены в порядке, показанном на фиг. 2, так, чтобы раз20
эффективно быть просканированы единственным элементом, чувствительным к сцинтилляции, элементы 10, чувствительные к сцинтилляции, могут быть составлены в группы, располагающиеся поперек соответственно более широких каналов так, что каждь й детектор состоит из такой группы чувствительных элементов. Это устройство (фиг. 3)
25 содержит (для каждого канала) три детектора 11, каждый из которых составлен группой из трех элементов 0 чувствительных к сцинтилляции. Детек торы 1I устанавливаются между тяжелы
;10 ми свинцовыми перегородками для защиты от влияпия соседних каналов.
Блок 12 управления и синхронизаци обрабатывает сигналы, получаемые от детекторов 11 одного канала ленты. 215 Следует отметить, что блок 12 должен иметь множественные обрабатывающие схемы для выполнения таких операций для каждого канала.
Блок 12 работает для получения сигналов от всех детекторов 11 через регупярные интервалы времени, определяемые скоростью ленты, так, что каж,цый сигнал представляет выход соответствующего детектора 1I, когда отдельный короткий участок Ленты проходит этот детектор независимо от того, расположен или нет на этом участке кусок руды.
Блок 12 накапливает эти сигналы 50 таким образом, что каждый сигнал последнего детектора 11 накапливается вместе с сигналом от каждого предшес вующего детектора П во время, равно
D
. перед получением сигнала от после него детектора 11, где D - расстояния между последним детектором 11 и предшеств-;,тощим детектором 11, V 40
45
делить пролет 3 ленты на некоторое количество узких каналов. При этом каждый элемент, чувствительный к сцинтилляции, способен эффективно просматривать всю ширину канала. В этом случае с каждым каналом связы- Бается группа детекторов сцинтилляции,, расположенных с равными интервалами вдоль канала, причем каждый детектор образуется единственным элементом 10, чувствительным к сцинтилляции. На фиг.1 показаны такие детекторы 11 для каждого канала. Когда сортируемые куски будут
эффективно быть просканированы единственным элементом, чувствительным к сцинтилляции, элементы 10, чувствительные к сцинтилляции, могут быть составлены в группы, располагающиеся поперек соответственно более широких каналов так, что каждь й детектор состоит из такой группы чувствительных элементов. Это устройство (фиг. 3)
содержит (для каждого канала) три детектора 11, каждый из которых составлен группой из трех элементов 0, чувствительных к сцинтилляции. Детекторы 1I устанавливаются между тяжелы
ми свинцовыми перегородками для защиты от влияпия соседних каналов.
Блок 12 управления и синхронизации обрабатывает сигналы, получаемые от детекторов 11 одного канала ленты. Следует отметить, что блок 12 должен иметь множественные обрабатывающие схемы для выполнения таких операций для каждого канала.
Блок 12 работает для получения сигналов от всех детекторов 11 через регупярные интервалы времени, определяемые скоростью ленты, так, что каж,цый сигнал представляет выход соответствующего детектора 1I, когда отдельный короткий участок Ленты проходит этот детектор независимо от того, расположен или нет на этом участке кусок руды.
Блок 12 накапливает эти сигналы таким образом, что каждый сигнал последнего детектора 11 накапливается вместе с сигналом от каждого предшествующего детектора П во время, равное
D
. перед получением сигнала от последнего детектора 11, где D - расстояния между последним детектором 11 и предшеств-;,тощим детектором 11, V
31
скорость перемещения ленты. Это накоп ление продолжается в течение определенного времени для выработки сигналов , каждый из которых представляет выходы всех детекторов 11, получаемые с отдельного участка ленты.
Сигналы, получаемые от средства сканирования, указывают, какой отдельный участок ленты занят сортируемыми кусками руды. Блок 12 использует эти сигналы для сравнения сигналов сканирования с сигналами накопления, соответствующими этому участку ленты, для выработки управляющих сигналов.
используемых для управления сортиров- 5 ные сигналы триггера 13. Выходные
кой. Сравнение эффективно направляет сигналы накопления так, что окончательные сигналы управления зависят от накопления сигнала, получаемого от последнего детектора П во время, указанное сигналом сканирования, яв- шющееся временем прохождения объекта через последний детектор II, и от сигнала, полученного от каждого пред- пествующего детектора 1 1 во время, указанное сигналами сканирования. Это время является временем прохождения того же объекта через предшествующий детектор 11,
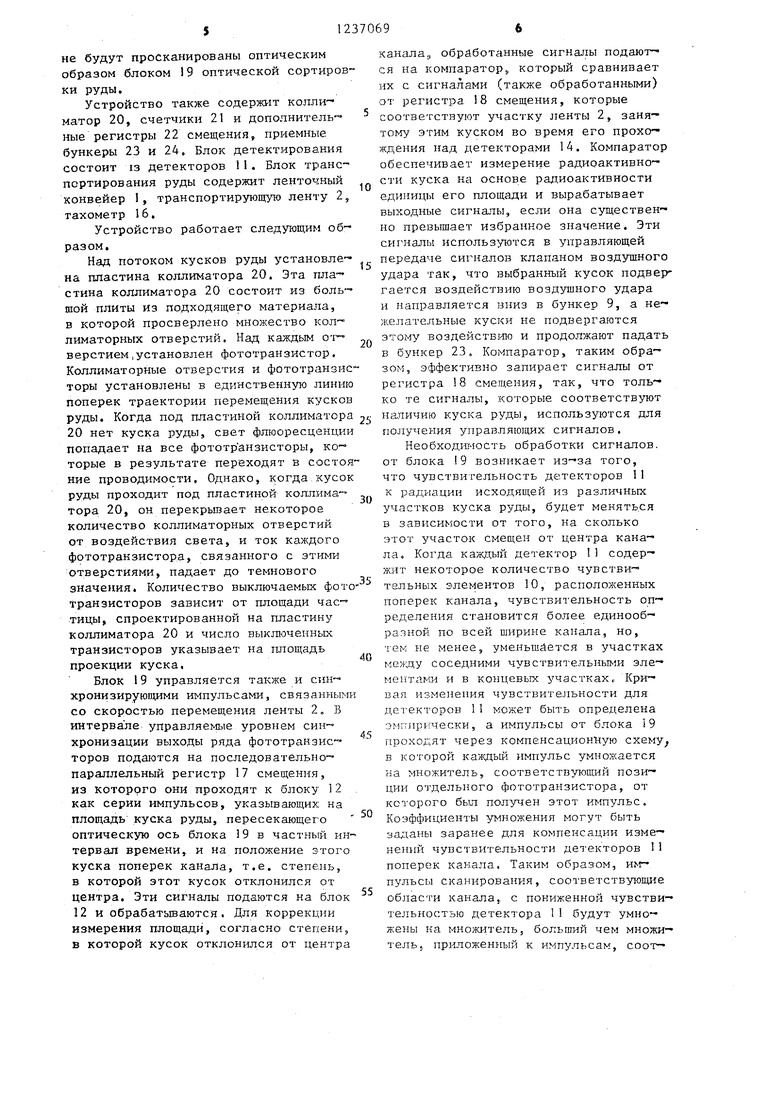
Одна отдельная схема для выполнения указанных функций блока 12 показана на фиг. 4. Эта схема содержит триггеры 13 для получения импульсов сцинтилляции от детекторов 11. В слу-
чае, когда каждый сцинтилляционный де-з рующим входом 15, и проходят на зле-
мент 11ЯИ, который также получает импульсы счета от триггера 13. Уровень синхронизации входа 15 выбирается
детектор 11 состоит из группы чувствительных элементов 10, (фиг. 2 и 3) выходы отдельных чувствительных элементов 10 подаются на элементы ИЛИ 14 для обеспечения входов триггеров, но если элементы 10, чувствительные к сцинтилляции, установлены в порядке, показанном на фиг. 2, без этих элементов ИЛИ можно обойтись.
Триггеры 13 имеют установочные входы 15. Синхронизирующие импульсы подаются на эти входы 15 с частотой, пропорциональной скорости ленты, замеренной тахометром 16. Постоянная пропорциональности выбирается так, чтобы интервал времени между последовательными импульсами бьш представлен очень коротким участком пути ленты. Во время этого интервала вретак, что наполненные сигналы проходят Q на элемент ИЛИ 14 от регистра 17 смещения с теми же участками лент, что и сигналы, проходящие от триггера 13. Вывод элемента {-ШИ 14 подключен к следующему регистру 17 смещения, ко- 45 торый эффективно складывает импульсы счета от регистра 13 и накопленные импульсы счета от регистра 17 смещения.
Накопленные импульсы счета, полу- 50 ченные регистром 17 смещения, переводятся в большой регистр 18 смещения, который работает при относительно высокой частоте синхронизации. Импульсы счета, накопленные таким образом, со-
мени триггеры 13 устанавливаются лю- 55 держат импульсы счета, полученные от
бым сцинтилляционным импульсом, вырабатываемым детектором 11, так, чтобы в конце этого же интервала времени
сигнал, подаваемый и син ронизируе- Mbtft в регистрах 17 смещения, указывал, был ли импульс получен от детекторов 11 сцинтилляции. Триггеры 13 устанавливаются в начале каждого синхронизирующего периода в состояние готовности к следующему интерва- лу времени.
Выходные сигналы триггера 13 подаются на регистр 17 смещения и синхронизируются в нем до уровня, управляемого синхронизирующим входом 15, и затем подаются на злемент ИЛИ 14, который также получает выходсигналы триггера 13 таким образом накапливаются с задержанными выходными сигналами триггера 13, и наполненные импульсы подаются на следующий регистр 17 смещения.
Уровень синхронизации синхронизирующего входа 15 регистра 17 смещения выбирается относительно количества знаков хранения битов информации
в регистре 17 смещения и скорости ленты так, чтобы каждьй задержанный импульс, появляющийся на злементе ИЛИ 14 из регистра 17 смещения, бьш связан с тем же участком ленты, что
и импульс, появляющийся из регистра 17 смещения.
Накопленные импульсы счета прохо-
дят через регистр 17 смещения, на уровне, устанавливаемом синхронизитак, что наполненные сигналы проходят на элемент ИЛИ 14 от регистра 17 смещения с теми же участками лент, что и сигналы, проходящие от триггера 13. Вывод элемента {-ШИ 14 подключен к следующему регистру 17 смещения, ко- торый эффективно складывает импульсы счета от регистра 13 и накопленные импульсы счета от регистра 17 смещения.
Накопленные импульсы счета, полу- ченные регистром 17 смещения, переводятся в большой регистр 18 смещения, который работает при относительно высокой частоте синхронизации. Импульсы счета, накопленные таким образом, со-
объектов, проходящих над детекторами 11, и хранятся в регистре 18 смещения до тех пор, пока анализируемые куски
не будут просканированы оптическим образом блоком 9 оптической сортировки руды.
Устройство также содержит коллиматор 20, счетчики 21 и дополнитель ные регистры 22 смещения, приемные бункеры 23 и 24. Блок детектирования состоит 13 детекторов П. Блок транспортирования руды содержит ленточный конвейер 1, транспортирующую ленту 2, тахометр 16.
Устройство работает следующим образом.
Над потоком кусков руды установлв на пластина коллиматора 20, Эта гша стина коллиматора 20 состоит из большой плиты из подходящего материала, в которой просверлено множество кол- лиматорных отверстий. Над каждым o l - верстием.установлен фототранзистор, Коллиматорные отверстия и фототранзисторы установлены в единственнук) линию поперек траектории перемещения кусков руды. Когда под пластиной коллиматора 20 нет куска руды, свет флюоресценции попадает на все фототр анзисторы, которые в результате переходят в состояние проводимости. Однако, когда,кусок руды проходит под пластиной коллиматора 20, он перекрьюает некоторое количество коллиматорных отверстий от воздействия света, и ток каждого фототранзистора, связанного с этими отверстиями, падает до темнового значения. Количество выключаемых фото Транзисторов зависит от площади частицы, спроектированной на пластину коллиматора 20 и число выключенных транзисторов указывает на площадь проекции куска.
Блок 19 управляется также и синхронизирующими импульсами, связанными со скоростью перемещения ленты 2. В интервале управляемые уровнем синхронизации выходы ряда фототранзис- торов подаются на последовательно- параллельный регистр 17 смещения, из которого они проходят к блоку 12 . как серии импульсов, указывающих на площадь куска руды, пересекающего оптическую ось блока 19 в частный интервал времени, и на положение этого куска поперек канала, т.е. степень, в которой этот кусок отклонился от центра. Эти сигналы подаются на блок 12 и обрабатьтаются. Для коррекции измерения площади, согласно степени, в которой кусок отклонился от центра
0
5
0
5
0
5
0
5
0
5
канала., обработанные сигналы подают-- ся на компаратор,, который сравнивает их с сигналами (также обработанными) от регистра 18 смещения, которые соответствуют участку ленты 2, занятому этим куском во время его прохождения над детекторами 14. Компаратор обеспечивает измерение радиоактивности куска на основе радиоактивности единицы его площади и вырабатывает выходные сигналы, если она существенно превыщает избранное значение. Эти сигналы используются в управляющей передаче сигналов клапаном воздушного удара так, что выбранный кусок подвер гается воздействию воздушного удара и направляется вниз в бункер 9, а нежелательные куски не подвергаются этому воздействию и продолжают падать в бункер 23, Компаратор, таким образом, эффективно запирает сигналы от регистра 18 смещения, так, что только те сигналы, которые соответствуют наличию куска руды, используются для получения управляющих сигналов.
Необходимость обработки сигналов, от блока 19 возникает из-за того, что чувствительность детекторов 11 к радиации исходящей из различных участков куска руды, будет меняться в зависимости от того, на сколько этот участок смещен от центра канала. Когда каждый детектор I1 содержит некоторое количество чувствительных элементов 10, расположенных поперек канала, чувствительность определения становится более единообразной по всей ширине канала, но, тем не менее, уменьшается в участках соседними чувствительными элементами и в концевых участках. Кривая ,ия чувствительности для детекторов 1 может быть определена эмпирически, а импульсы от блока 19 проходят через компенсационную cxeмy в которой каждый импульс умножается на множитель, соответствующий позиции отдельного фототранзистора, от которого был получен этот импульс. Коэффициенты умножения могут быть заданы заранее для компенсации изменений чувствительности детекторов 11 поперек канала. Таким образом, импульсы сканирования, соответствующие области каналаS с пониженной чувствительностью детектора 1 будут умножены на множитель, больший чем множитель приложенггый к импульсам, соот-
ветствующим участкам с высокой чувствительностью. Импульсы этой области, следовательно, нормализуются или стандартизуются и проходят в накопитель, из которого они затем попадают в ком™ паратор.
Сигналы от регистра 18 смещения перед подачей на компаратор также обрабатываются. Эти сигналы проходят через умножитель (генератор коротких импульсов) и делитель в накопитель, который подает обработанные сигналы на компаратор. Делитель может быть настроен для соответствия качеству (сорту) испытываемой руды и для определения интенсивности радиоактивности, требуемой для выработки сигнала приема пуска.
Сигналы, передаваемые на клапаны воздушного удара, являются сигналами, полученными от блока 19, и указывающими как на площадь, так и на положение отдельного y iacTKa куска т.е., сигналами перед компенсацией чувствительности детектора 11. Управляющие сигн,алы определяют, которые из этих сигналов сканирования должны быть переданы на клапаны воздушного удара, и выбранные сигналы синхронизируются через регистр 17 смещения так, чтобы они управляли элементами ИЛИ после соответственной временной задержки и в соответствии с точным положением куска руды в канале.
Различные синхронизирующие импуль- сы для управления проведения сигналов через триггеры 13 и регистры 17 смещения могут быть с помощью управляющих схем.
Схема (фиг. 4) удовлетворяет вы- работку управляющих сигналов Принять /Отвергнуть в операции сортировки. Однако, если объекты 4, подлежащие сортировке, включая некоторые куски интенсивной радиоактивности, некото- рые регистры 17 смещения могут насытиться и некоторые импульсы счета могут быть утеряны. Термин Накопление используемый здесь, не ограничивается тотальным сложением всех накопленных сигналов. Вероятность насыщения регистра 17 смещения возрастает по мере увеличения накопленной через элемент ИЛИ информации. Предел насыщения регистров 17 смещения незначителен в простой операции сортировки, однако в некоторых операциях важно показать сорт руды, проходящей через машину.
0
5
0
5
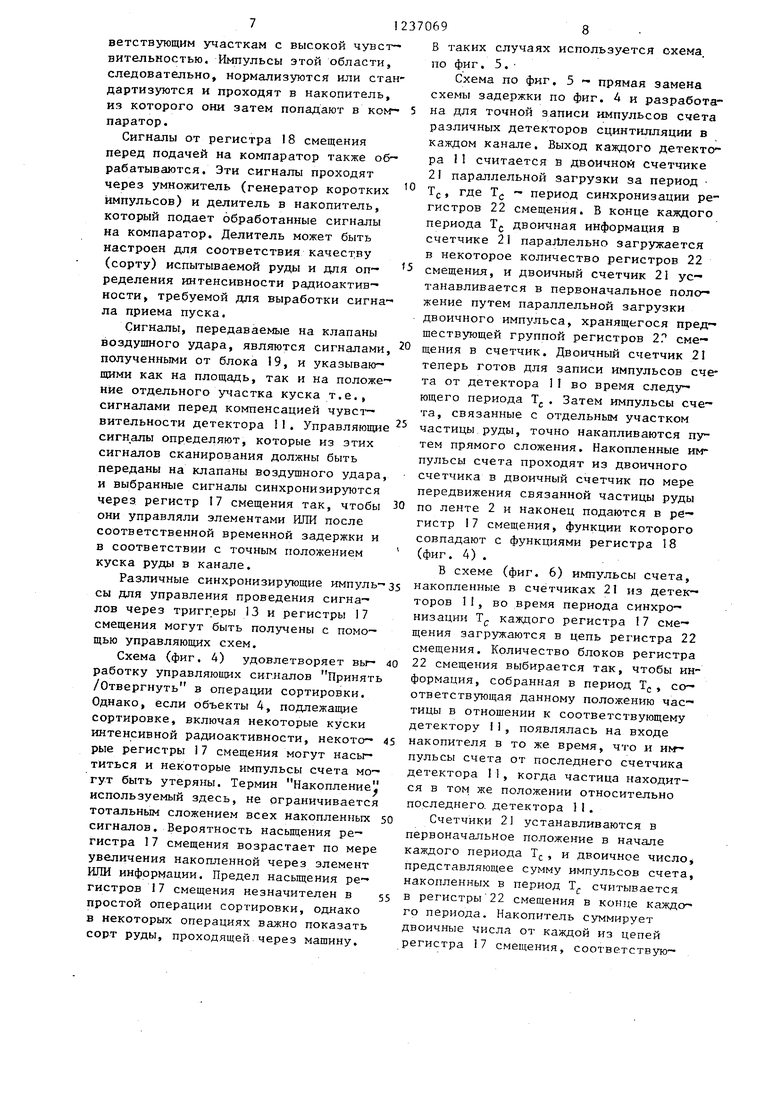
В таких случаях используется схема. по фиг. 5.
Схема по фиг. 5 - прямая замена схемы задержки по фиг. 4 и разработана для точной записи импульсов счета различных детекторов сцинтилляции в каждом канале. Выход каждого детектора 11 считается в двоичной счетчике 2I параллельной загрузки за период T, , где Т - период синхронизации регистров 22 смещения. В конце каждого периода Т двоичная информация в счетчике 21 параллельно загружается в некоторое количество регистров 22 смещения, и двоичный счетчик 21 устанавливается в первоначальное положение путем параллельной загрузки двоичного импульса, хранящегося пред- ществующей группой регистров 2Г смещения в счетчик. Двоичный счетчик 21 теперь готов для записи импульсов счета от детектора I 1 во время следз - ющего периода Т. . Затем импульсы счета, связанные с отдельным участком частицы руды, точно накапливаются путем прямого сложения. Накопленные импульсы счета проходят из двоичного счетчика в двоичный счетчик по мере передвижения связанной частицы руды по ленте 2 и наконец подаются в регистр 17 смещения, функции которого совпадают с функциями регистра 18 (фиг. 4) .
В схеме (фиг. 6) и тульсы счета, накопленные в счетчиках 21 из детекторов 11, во время периода синхронизации Т каждого регистра 17 смещения загружаются в цепь регистра 22 смещения. Количество блоков регистра 22 смещения выбирается так, чтобы информация, собранная в период Tj, соответствующая данному положению частицы в отношении к соответствующему детектору I1, появлялась на входе накопителя в то же время, что и utr- пульсы счета от последнего счетчика детектора I1, когда частица находится в том же положении относительно последнего, детектора 1 I .
Счетчики 21 устанавливаются в первоначальное положение в начале каждого периода Т(. , и двоичное число, представляющее сумму импульсов счета, накопленных в период Т. считывается в регистры 22 смещения в конце каждого периода. Накопитель суммирует двоичные числа от каждой из цепей регистра 17 смещения, соответствую-
щей каждому счетчику детектора 11, и сумма в виде двоичного числа затем подается на регистр 17 смещения, торый задерживает информацию на период, соответствующий времени, кото- рое требуется куску руды, чтобы пе- рейти .расстояния между последним детектором 11 и блоком 19.
Указанное устройство бьшо приведено дли примера и может быть сущест венно изменено. Например, в качестве дет-екторов мо.жно использовать другие типы детекторов для определения дру- гих характеристик сортируемых объектов .
Несмотря на то, что предпочтительно сканировать куски во время свободного полета, поскольку это поэво- ,j
ляет использовать блок 19, куски могут сканироваться перед появлением над детекторами 11, и детекторы 11 тогда будут работать для получения сигнала только тогда, когда кусок проходит над ними.
Предлагаемое изобретение не обя зательно ограничивается сортирующими машинами 5 а система детектирования может использоваться для автоматического сортирования или клеймления объектов 4. Соответственно, предлагаемое изобретение ни в коем случае не ограничивается деталями указанного устройства. Использование изобретения повышает точность сортирования.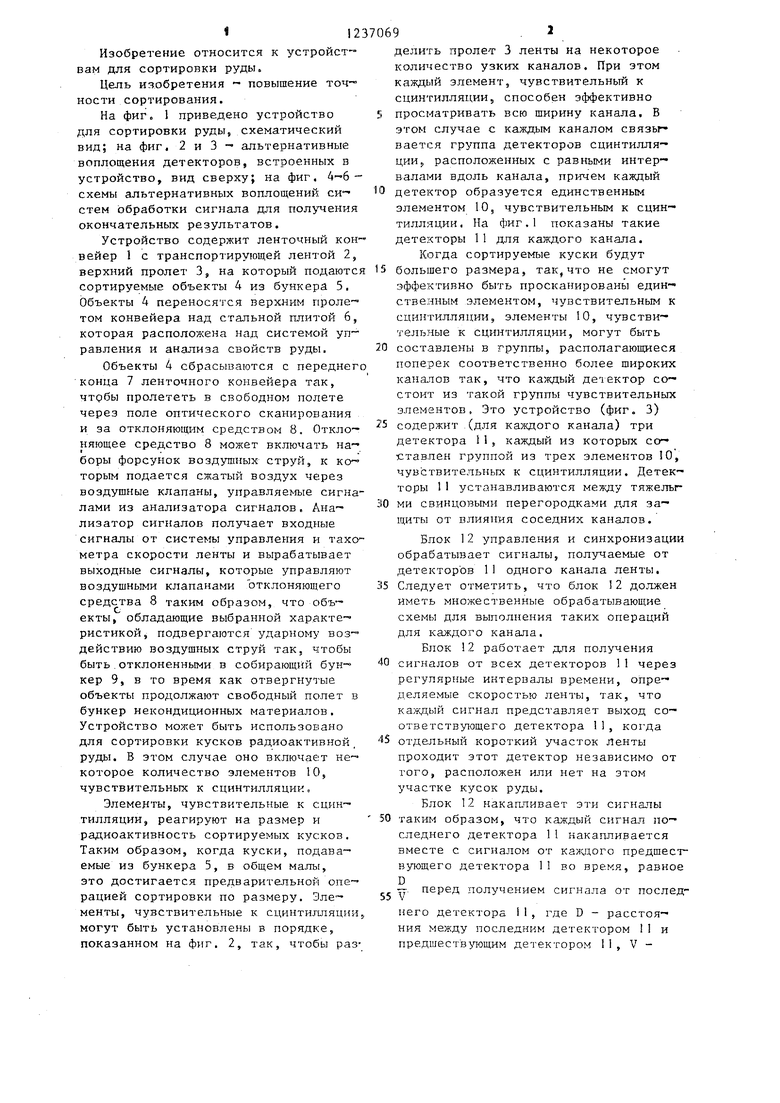
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической сорбировки кускового материала | 1989 |
|
SU1697906A2 |
| СПОСОБ СОРТИРОВКИ КУСКОВОГО МИНЕРАЛЬНОГО СЫРЬЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2103075C1 |
| МНОГОКАНАЛЬНЫЙ РЕНТГЕНОРАДИОМЕТРИЧЕСКИЙ СЕПАРАТОР | 2010 |
|
RU2432206C1 |
| СПОСОБ ОБОГАЩЕНИЯ МИНЕРАЛИЗОВАННОЙ ГОРНОЙ МАССЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2151643C1 |
| Устройство для программного управления группой станков | 1970 |
|
SU871745A3 |
| Устройство для автоматической сортировки кускового материала | 1988 |
|
SU1567269A1 |
| Устройство для сепарации руды | 1989 |
|
SU1729620A1 |
| Устройство для автоматического управления процессом покусковой сортировки минерального сырья | 1982 |
|
SU1050741A1 |
| Устройство для отображения телетекста на экране телевизионного приемника | 1980 |
|
SU1181568A3 |
| Устройство для сортировки кусков губчатого титана | 1987 |
|
SU1443981A1 |
ОЖ Редактор А. Сабо
Составитель С.Александров Техред Л.Сердюкова
фиг 6 Корректор И.Муска
3100/59
Тираж 565 Подписное BHtninii Государственного комитета СССР
по делам изобретений и открытий И3035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Патент США № 3802558, кл | |||
| Парный рычажный домкрат | 1919 |
|
SU209A1 |
