«
Изобретение, относится к машино- - строению и может быть применено в приводах транспортеров, шнеков.
Цель изобретения - повышение надежности в работе за счет обеспечения фиксации корпуса в продольном и радиальном направлениях.
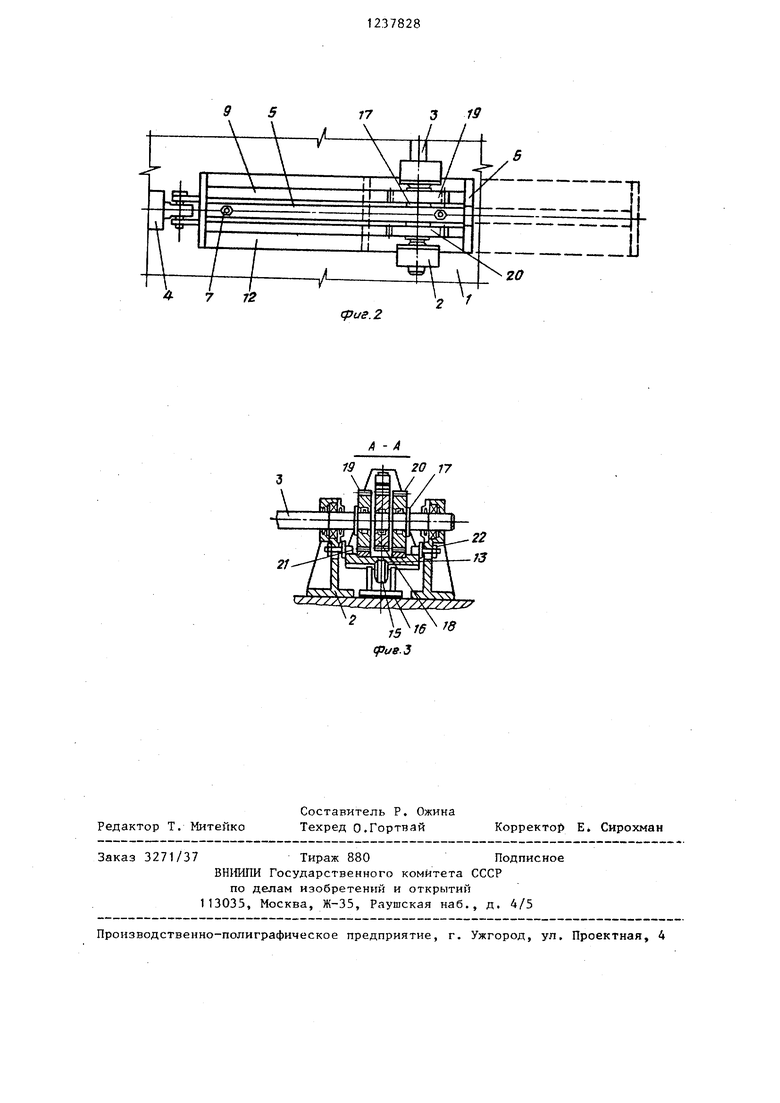
На фиг. 1 изображен предлагаемый механизм, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1.
Механизм для преобразования воз- вратчо-поступательного движения во вращательное в горизонтальной плоскости содержит основание 1, опоры 2, установленный на них вал 3, привод 4 (например, гидроцилиндр), корпус, состоящий из параллельных друг другу пластин 5 и 6, к которым с помощью болтов 7 прикреплены зубчатые рейки 8 и 9, кронштейны 10 служат для подсоединения привода 4. Между верхней пластиной 5 корпуса и рейкой 8 установлены регулировочные проклад- ки 11, нюкняя пластина 6 сверху по бокам имеет дорожки 12, а на наружной поверхности пластин 5 и 6 корпуса выполнен профильньй паз 13.
На основании 1 на кронштейнах 14 установлены регулируемые рохшки 15, имеющие наружную трапецеидальную форму для взаимодействия с профильным пазом 13 пластины 6. Под кронштейнами 14 установлены регулировочные прокладки 16.
rfa валу 3 с помощью стопорных колец 17 установлены три шестерни 18, 19 и 20. Шестерня 18 взаимодействует с рейкой 8, а шестерни 19 и 20 - с рейкой 9 соответственно. Все шестерни имеют обгонные муфты (не показано) , причем у шестерен 19 и 20 муфты работают в одну сторону, а у шестерни 18 - встречно. На опорах 2 установлены ролики 21 с ребордами 2 взаимодействующие с профильными дорожками 12 пластины 6. Причем ролики 21 по отношению к роликам 15 размещены перпендикулярно.
Механизм для преобразования возвратно-поступательного движения во вращательное в горизонтальной плоскости работает следующим образом.
При перемещении корпуса с помощью привода 4 вправо рейки 9, взаимодей378282
ствуя с шестернями 19 и 2Q, вращают их, а вместе с ними и ведомый вал 3 против часовой стрелки. Корпус, перемещаясь по роликам 15 в горизонтальg ном направлении, поддерживаемом также роликами 21, вращает крайние шестерни 19 и 20 до тех пор, пока не будет выбран весь ход привода (фиг. 1). Шестерня 18, взаимодействуя в это
10 время с рейкой 8 и вращаясь в ту же сторону (против часовой стрелки), что и крайние шестерни с помощью обгонной муфты, свободно поворачивается на валу 3.
JS При подаче приводом 4 корпуса влево рейка 8, взаимодействуя с шестерней 18, меняет вращение на обратное и продолзкает вращать вал 3 в прежнем направлении (против часовой
201 стрелки). А шестерни 19 и 20, изменив вращение на обратное, с помощью обгонных муфт свободно проворачиваются на валу 3. При выборе всего хода влево привод 4 начинает пода25 вать корпус вправо, и процесс вращения в;1ла 3 против часовой стрелки повторяется. Таким образом, возвратно-поступательное движение привода 4 преобразуется в постоянное вращатель30 ное движение вала 3 в одну сторону.
В продольном направлении фиксация корпуса обеспечивается за счет роликов 15, а в радиальном - роликами 21. Регулировка зазора в зубчатом зацеплении производится в следующей последовательности.
Вначале устанавливается нормальный зазор в зацеплении шестерен 19 и 20 с рейкой 9. Он выдерживается с помо д щью прокладок 16 путем изменения установки по высоте кронштейнов 14 при горизонтальном расположении пластины 6, после чего этот зазор фиксируется с помощью роликов 21 до соприкосновения с пазом 12. Затем с помо- ш,ью прокладок 11 вьщерживается зазор между рейкой 8 и шестерней 18.
В процессе эксплуатации ролики 21 обеспечивают постоянство отрегулированного зазора в зацеплении шестерен 18, 19 и 20 как с рейкой 8, так и рейкой 9 за счет того, что пластина 6 находится между взаимно перпендикулярными роликами 15 и 21, обеспечивая постоянное расположение по высоте корпуса, а следовательно, и зазора в зацеплении при работе механизма.
45
50
55
4 7 7J
сриг.2
3 13
Tl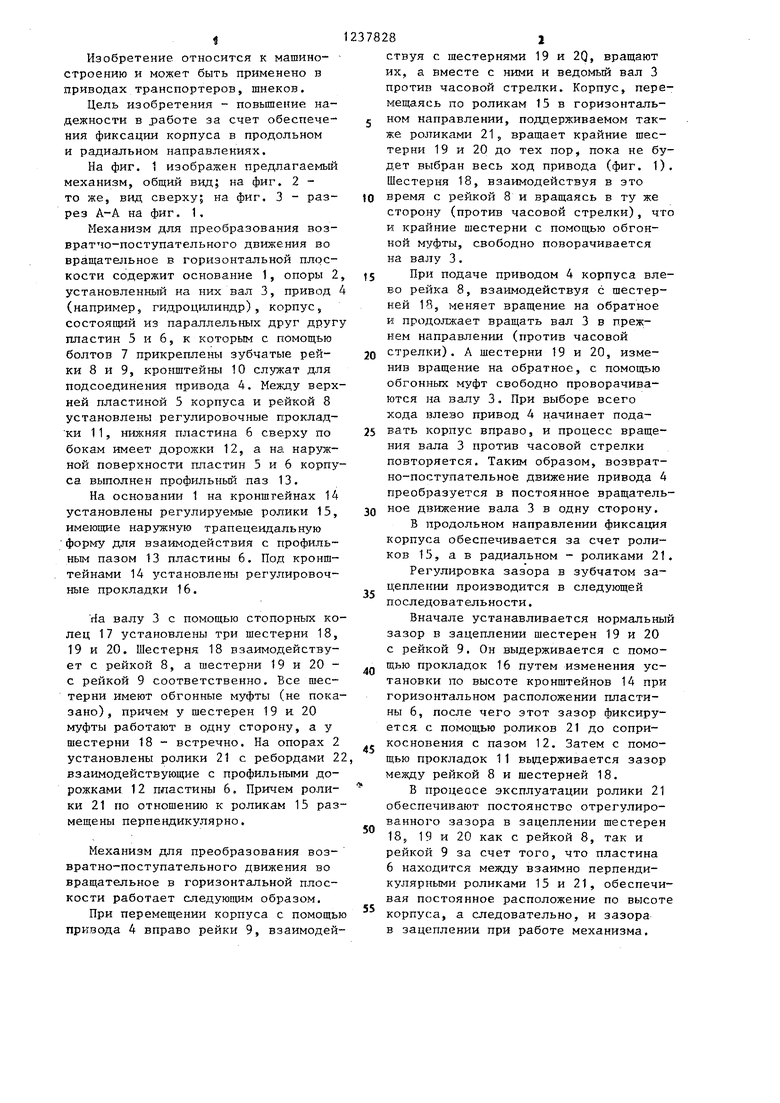
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2009 |
|
RU2386066C1 |
| Устройство для передачи штучных грузов с одного конвейера на дрYгой | 1984 |
|
SU1244063A1 |
| Поршневая машина | 1989 |
|
SU1728501A1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ АЛИЕВЫХ | 2007 |
|
RU2349814C1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2005 |
|
RU2298714C2 |
| КОСИЛКА | 2009 |
|
RU2406287C1 |
| ВОЛНОВОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2373424C1 |
| Устройство для преобразования возвратно-поступательного движения в однонаправленное вращательное | 2024 |
|
RU2838384C1 |
| Преобразователь возвратно-поступательного движения в однонаправленное вращательное | 2023 |
|
RU2813755C1 |
| Объемная машина | 1989 |
|
SU1767203A1 |

20 17
Редактор Т. Митейко
Составитель P. Ожина Техред О.Гортвай
Заказ 3271/37Тираж 880Подписное
ВНРШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор) Е. Сирохман
| Прямоточный клапан | 1988 |
|
SU1562576A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПРОИЗВОДСТВА ПИЩЕВОГО ПРОДУКТА ИЗ БОЛЬШОЙ САПОТЫ | 2012 |
|
RU2501320C1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
