Изобретение относится к машиностроению, а именно к механизмам для преобразования возвратно-поступательного движения во вращательное и наоборот, и может быть использовано в двигателях внутреннего сгорания, а также в нефтедобывающих насосах.
Известен преобразователь возвратно-поступательного движения во вращательное и наоборот (см. Алиев А.С., Алиев Р.А., Мамедов Г.А. Решение ФИПС на выдачу патента по заявке №2005118223/11 на «Преобразователь движения» от 14.06.2005 г.), который может быть указан в качестве прототипа.
Известный преобразователь движения содержит четыре цилиндра, расположенные попарно, поршни взаимно противоположных цилиндров, которых связаны друг с другом штангой неподвижно. Штанга через первую и вторую перемычки неподвижно связанна с параллельно-зубчатыми рейками. Данные рейки находятся в сцеплении с соответствующими сегментными шестернями. Сегментные шестерни установлены неподвижно на одном выходном валу. На каждой шестерне зубья занимают менее половины (1800) его делительной окружности. Взаимодействия зубчатых реек с соответствующими сегментными звездами сдвинуты во времени по фазе, преимущественно на 900.
К недостаткам указанного преобразователя возвратно-поступательного движения во вращательное и наоборот относятся:
а) необходимость точной синхронизации возвратно-поступательного движения поршней с вращательным движением сегментной шестерни.
б) жесткое соотношение между ходом поршней L и диаметром делительной окружности Dg сегментарной шестерни L=1/2Dgπ.
Известен также преобразователь движения [Алиев А.С., Алиев Р.А. Решение на выдачу патента по заявке №2007117882 на Преобразователь движения Алиевых от 14.05.2007 г.], содержащий не менее четырех цилиндров, расположенных попарно, штоки поршней взаимно противоположных цилиндров которых связаны друг с другом двумя параллельными зубчатыми рейками неподвижно, введены дополнительно не менее двух пар шестерен, установленных неподвижно на обоймах соответствующих обгонных муфт, ступицы которых неподвижно установлены на общем выходном валу. При этом первая и вторая рейка каждой пары сдвинуты относительно друг друга в поперечном направлении и взаимодействуют с первой и второй шестернями соответствующей пары с диаметрально противоположных сторон. Причем обгонные муфты каждой пары установлены так, что когда первые из них, передающие вращение на выходной вал по часовой стрелке, находятся в сцеплении, вторые муфты, передающие вращение в обратном направлении, находятся вне сцепления и наоборот. Кроме того, угол между параллельными зубчатыми рейками соседних пар цилиндров во фронтальной плоскости может меняться от 0 до 90°, а время их нахождения в «мертвых» точках сдвинуто по фазе на определенный промежуток, преимущественно на T/N, где N - число цилиндров.
Недостатком прототипа является сложность конструкции, большие габариты преобразователя движения, связанные с применением зубчатых реек, что снижает надежность конструкции.
Технической задачей данного изобретения является упрощение конструкции, повышение надежности эксплуатации преобразователя возвратно-поступательного движения во вращательное и наоборот.
Данная техническая задача решается следующим образом.
В преобразователь движения, содержащий двигатель с редуктором, шатун и шток, введены дополнительно кинематически связанные сегментная шестерня, первые и вторые шестерни, обгонные муфты, радиальные рычаги, а так же второй шатун. При этом зубья сегментной шестерни занимают менее половины делительной окружности, которые по очереди взаимодействуют с зубьями первой и второй шестерен, установленных на обоймах соответствующих обгонных муфт. Данные муфты неподвижно связанны с соответствующими радиальными рычагами, которые через соответствующие шатуны взаимодействуют со штоком.
Кроме того, преобразователь движения содержит дополнительно качалку с дугообразным наконечником, шарнирно связанным с верхними наконечниками шатунов. При этом через качалку перекинут трос, взаимодействующий с поршнем насоса нефтяной скважины.
Второй вариант преобразователя движения содержит шток, третий шатун и второй вал и взаимодействующие друг с другом четвертый шатун, третий и четвертый радиальные рычаги и шестерни, шарнирно установленные на соответствующих осях, а также третью и четвертую обгонные муфты. Ступицы обгонных муфт неподвижно установлены на втором валу, а на обоймах - пятая и шестая шестерни, входящие в сцепление с третьей и четвертой шестернями, неподвижно связанными с соответствующими радиальными рычагами, наконечники которых шарнирно соединены с наконечниками третьего и четвертого шатунов, связанных со штоком. При этом обгонные муфты установлены на втором валу так, чтобы при движении шатуна в ту или в другую стороны они входили в сцепление по очереди.
Третий вариант преобразователя движения содержит кинематически связанные вал, центральную шестерню, шатун и шток, а также четвертый и пятый валы, пятые и шестые обгонные муфты, шестерни, радиальные рычаги и шатуны, вторую и третью сегментные шестерни. При этом на четвертом и пятом валах установлены взаимодействующие с центральной шестерней вторая и третья сегментные шестерни и пятая и шестая шестерни, закрепленные на обоймах муфт. Ступицы обгонных муфт неподвижно установлены на четвертом и пятом валах соответственно и взаимодействуют через пятый и шестой радиальные рычаги и шатуны со штоком, установленным с возможностью возвратно-поступательного движения.
Кроме того, сегментные шестерни установлены на валах с возможностью поворота на угол, соответствующий модулю зуба.
На фиг.1 представлен вид (А-А), конструкция первого варианта преобразователя движения, где:
1 - первая и вторая плоскопараллельные пластины;
2 - кронштейны;
3 - двигатель с редуктором (не виден);
4 - вал;
5, 6 - оси;
7, 8 - обгонные муфты;
9, 10 - радиальные рычаги;
11 - сегментная шестерня;
12, 13 - первая и вторая шестерни;
14, 15 - шатуны;
16 - качалка с противовесом;
17 - ось;
18 - трос;
19 - шарнирные соединения;
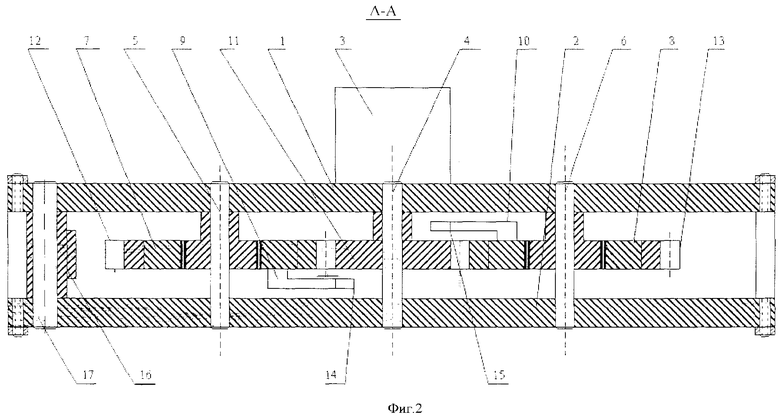
На фиг.2 представлен вид сбоку (А-А), конструкция первого варианта преобразователя энергии, где позиции те же, что на фиг.1
На фиг.3 представлен вид сбоку, конструкция второго варианта преобразователя, где:
20 - вал;
21 - первая обгонная муфта;
22, 23 - оси;
24, 25, 26 - шестерни;
27 - радиальный рычаг;
28, 29 - шатуны;
30 - шток;
31 - плоскопараллельные пластины;
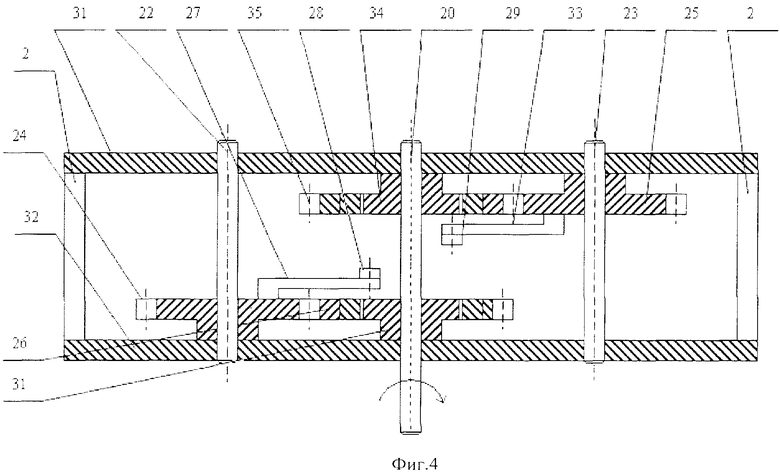
На фиг.4 представлен вид С-С по фиг.3, где позиции 20-31 те же, что на фиг.3:
32 - кронштейны;
33 - радиальный рычаг;
34 - вторая обгонная муфта;
35 - шестерня;
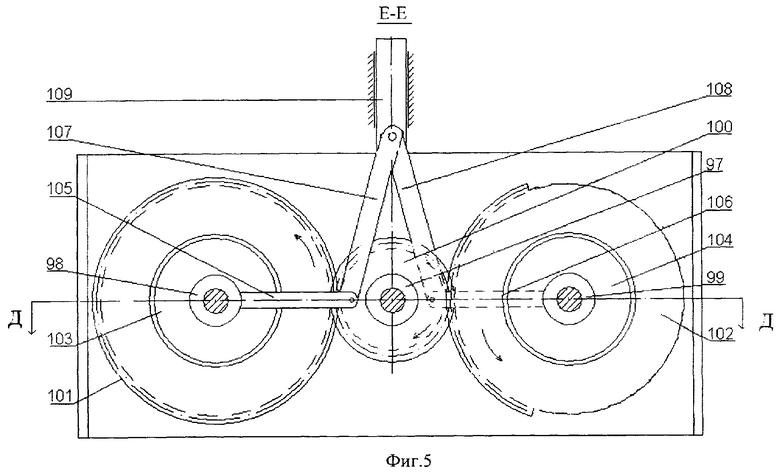
На фиг.5 представлена конструкция третьего варианта преобразователя движения, вид Е-Е по фиг.6:
97, 98, 99 - валы;
100, 101, 102 шестерни;
103, 104 - обгонные муфты;
105, 106 - радиальные рычаги;
107, 108 - шатуны;
109 - шток.
На фиг.6 представлен вид Д-Д по фиг.6, конструкция третьего варианта преобразователя движения, где позиции 97-109 те же, что на фиг.5:
110, 111 - сегментные шестерни;
112 - двигатель с редуктором;
113 - плоскопараллельные пластины;
114 - кронштейны;
115 - шпонки.
Принцип действия первого варианта преобразователя движения, конструкция которого представлена на фиг.1 и фиг.2, заключается в следующем.
Преобразователь размещен между двумя плоскопараллельными пластинами, соединенными кронштейнами 2. На валу 4 двигателя с редуктором 3 установлена сегментная шестерня 11. Зубья сегментной шестерни занимают менее половины ее делительной окружности. С двух сторон от сегментной шестерни симметрично на осях 5 и 6 вращения шарнирно установлены обгонные муфты 7, 8 [3]. Зубья сегментной муфты по очереди входят в сцепление с зубьями первой 12 и второй 13 шестерен. Данные шестерни неподвижно закреплены на обоймах обгонных муфт, соответственно. Кроме того обоймы обгонных муфт 7, 8 неподвижно связаны с соответствующими радиальными рычагами 9, 10.
Радиус делительной окружности шестерен 12 и 13 в два раза больше соответствующего диаметра сегментной шестерни. При вращении сегментной шестерни на угол 180° сегментные шестерни поворачиваются на 90°. На такой же угол ±45° от горизонта колеблются радиальные рычаги 9 и 10.
Концы первого и второго радиальных рычагов шарнирно соединены с корневыми наконечникам шатунов 14 и 15 соответственно. Периферийные наконечники шатунов также шарнирно могут быть соединены со штоком 30, аналогично второму варианту преобразователя движения (см. фиг.3).
На фиг.1 преобразователь вращательного движения во возвратно-поступательное движение используется в качестве привода качалки с противовесом 16 для нефтяных скважин. Концы шатунов 14 и 15 шарнирно соединены с качалкой 16, нижний конец которого установлен на оси 17 с возможностью свободных колебаний. Верный конец качалки имеет дугообразную форму, центр кривизны которого совпадает с осью колебаний 17.
При повороте сегментной шестерни на 180° по часовой стрелке вторая шестерня, находящаяся с ней в сцеплении, поворачивается на 90° против часовой стрелки. Радиальный рычаг 10, связанный с обоймой обгонной муфты 8, опускается вниз и тянет за собой шатун 15. Это приводит к опусканию качалки 16. При этом обгонная муфта 7 находится вне сцепления. Обойма данной муфты и связанная с ней первая шестерня 12 поворачиваются на 90° против часовой стрелки.
Во второй полупериод поворота сегментной шестерни в сцепление входит обгонная муфта 7, а обгонная муфта 8 выходит из сцепления. В результате взаимодействия сегментной шестерни с первой шестерней 12 последняя поворачивается на 90° против часовой стрелки. При этом радиальный рычаг 9, связанный с обоймой обгонной муфты 7, поднимается вверх совместно с шатуном 14. Шатун, в свою очередь, поднимает качалку вверх.
Таким образом, качалка совершает возвратно-поступательные колебания в вертикальной плоскости.
Через наконечник качалки перекинут трос 18, конец которого связан с поршнем нефтеперегонного насоса.
КПД предлагаемого преобразователя вращательного движения в возвратно-поступательное движение шатунов 14 и 15 выше, чем у широко применяемого кривошипно-шатунного преобразователя. Это связано с тем, что средний момент на валу у кривошипно-шатунного преобразователя за пол-оборота вала двигателя 3 в пределах от 0 до π равен 0,6 Rρ. В предлагаемой конструкции преобразователя движения средний момент в пределах угла π/2 составляет 0,9 Rρ. Средний момент по сравнению с прототипом возрастает в 1,5 раза.
Дополнительное увеличение момента на валу на 40% можно достичь за счет увеличения рычага R в 1,4 раза, так как в прототипе размах 2R в 1,4 раза больше, чем размах в данной конструкции. Таким образом, суммарный момент возрастает в 2,1 раза.
Первый вариант преобразователя энергии может быть использован и для обратного преобразования возвратно-поступательного движения штока (см. фиг.3) или колебательного движения качалки 16 в возвратно-поступательное движение вала 4.
Амплитуда возвратно-поступательного движения штока определяется диаметром сегментной шестерни и длиной радиальных рычагов.
Второй вариант преобразователя движения, конструкция которого представлена на фиг.3 и фиг.4, предназначен для преобразования возвратно-поступательного движения штока 30 во вращательное движение вала 20.
Второй вариант преобразователя движения размещен между плоскопараллельными пластинами 31, соединенными друг с другом кронштейнами 32. Между пластинами параллельно установлены вал 20, оси 22 и 23. На осях 22 и 23 шарнирно установлены шестерни 24 и 25 соответственно. На валу 20 неподвижно установлены ступицы первой 21 и второй 34 обгонных муфт. На обоймах данных муфт неподвижно установлены шестерни 26 и 35 соответственно. При этом шестерня 24 находится в сцеплении с шестерней 26, а шестерня 25 - с шестерней 35. Кроме того, шестерня 24 неподвижно связана с радиальным рычагом 27. Шестерня 25 также неподвижно связана с радиальным рычагом 33. Периферийные наконечники радиальных рычагов 27 и 33 шарнирно соединены с наконечниками шатунов 28 и 29 соответственно. Вторые наконечники данных шатунов также шарнирно связаны со штоком 30. При опускании штока вниз с помощью шатуна 29 шестерня 25 вращается против часовой стрелки. Находящаяся с ней в сцеплении шестерня 35 вращается по часовой стрелке. Вторая обгонная муфта 34 входит в сцепление и поворачивает вал 20 по часовой стрелке. В этот момент первая обгонная муфта 21 находится вне сцепления, шестерня 21, установленная на обойме данной муфты, крутится вхолостую против часовой стрелки. Находящаяся в сцеплении с шестерней 26 шестерня 24 под воздействием опускающегося шатуна 28 и радиального рычага 27 вращается вхолостую по часовой стрелке.
При обратном движении штока 30 вверх в сцепление входит первая обгонная муфта 21. Ведущей становиться шестерня 24, которая крутиться против часовой стрелки. Ведомая шестерня 26 через обгонную муфту 21 приводит во вращение вал 20 в прежнем направлении - по часовой стрелке. При этом вторая обгонная муфта 34 находится вне сцепления. Шестерня 25 и шестерня 35, установленная на обойме второй обгонной муфты 34, вращается вхолостую в обратном направлении.
Таким образом, первая и вторая обгонные муфты входят в сцепление по очереди. Это приводит к тому, что ведущими становятся то обгонная муфта 21, то обгонная муфта 34 и соответствующие шестерни 26 и 35. Независимо от этого вал 20 вращается в одном направлении - по часовой стрелке.
КПД второго варианта преобразователя движения также выше, чем у кривошипно-шатунного преобразователя в 2,1 раза. При этом шестерни 24 и 25 колеблются в пределах 90°. Зубья могут занимать 90° делительной окружности данных шестерен.
Принцип работы третьего варианта преобразователя движения, конструкция которого представлена на фиг.5 и фиг.6, заключается в следующем.
Третий вариант преобразователя преобразует вращательное движение вала 97 во возвратно-поступательное движение второго штока 109 и наоборот.
Преобразователь движения собран на каркасе, состоящем из двух плоскопараллельных пластин 114, соединенных угловыми кронштейнами 115.
На каркасе закреплен второй двигатель с редуктором 113. На валу двигателя 97 неподвижно установлена центральная шестерня 100. Параллельно второму валу шарнирно установлены валы 98 и 99. На данных валах неподвижно установлены ступицы обгонных муфт 103 и 104 соответственно. На обоймах указанных обгонных муфт неподвижно закреплены шестерни 101 и 102 соответственно. Кроме того, ступицы данных обгонных муфт неподвижно связаны с радиальными рычагами 105 и 106. Концы радиальных рычагов 105 и 106 шарнирно соединены с нижними наконечниками соответствующих шатунов 107 и 108. Верхние наконечники шатунов шарнирно соединены со штоком 109.
Центральная шестерня 100, установленная на валу двигателя с редуктором 112, входит в сцепление с шестернями 101 и 102, установленными на обоймах обгонных муфт 103 и 104. Кроме того, шестерня 100 по очереди взаимодействует с первой 110 и второй 111 сегментной шестернями.
Диаметры делительных окружностей шестерен 101 и 102 и первой 110, второй 111 сегментных шестерен в два раза больше, чем соответствующего диаметра шестерни 100. При повороте пятой шестерни на 180° вышеуказанные шестерни поворачиваются на 90°. На такой же угол поворачиваются радиальные рычаги 105 и 106.
Колебательное движение рычагов через соответствующие шатуны 107 и 108 передается на шток 109. Шток при этом совершает возвратно-поступательное движение.
Возвратно-поступательное движение шатунов может быть передано на качалку нефтеперегонного насоса, аналогично первому варианту преобразователя движения (см. фиг.1)
Шестерня 100 имеет большую толщину и одновременно входит в сцепление с шестернями 101 и 102, установленными на обоймах обгонных муфт 103 и 104. Кроме того, шестерня 100 по очереди взаимодействует со первой 110 и второй 111 сегментными шестерными. У данных сегментных шестерен зубья занимают угол менее 90°. Обгонные муфты 103 и 104 установлены на осях вращения 98 и 99 так, чтобы при вращении шестерни 100 по часовой стрелке они входили в сцепление по очереди.
При взаимодействии шестерни 100 с второй сегментной шестерней 111 обгонная муфта 104 входит в сцепление и поворачивает ступицу и связанный с ней радиальный рычаг на 90° против часовой стрелки. Это приводит к опусканию шатуна 108 и штока 109 вниз. При опускании шатуна 107 вниз обгонная муфта 103 выходит из сцепления, радиальный рычаг 105 и связанная с ней через ступицу первая сегментная шестерня 110 поворачиваются по часовой стрелке на +90°.
В следующий полупериод вращения пятой шестерни она входит в сцепление с первой 110 сегментной шестерней и шестерней 101, установленной на обойме обгонной муфты 103. Поворот шестерни 100 против часовой стрелки приводит к сцеплению обгонной муфты 103, и радиальный рычаг 105 становиться ведущим. Рычаг, в свою очередь, через шатун 107 толкает шатун 109 вверх. При этом шатун 108 и радиальный рычаг 106 выводят из сцепления обгонную муфту 104.
Радиальный рычаг 106 и вторая сегментная шестерня 111 вращаются вхолостую по часовой стрелке.
В последующий полупериод вращения пятого колеса процесс повторяется.
Таким образом, вращение пятой шестерни приводит к возвратно-поступательному движению штока.
Третий вариант преобразователя движения решает и обратную задачу: преобразует возвратно-поступательное движение штока 109 во вращательное движение вала 97.
При входе и выходе из сцепления обгонных муфт 103 и 104 происходит сдвиг между зубьями сегментных шестерен 110, 111 и шестернями 101 и 102 соответственно. Такой сдвиг может привести к заклиниванию спаренных шестерен с шестерней 100. Для предотвращения заклинивания сегментных шестерен 110, 111 должны быть установлены на валах 98 и 99 с возможностью колебания в пределах угла, соответствующего хорде, равной модулю зуба. Для этого ширина шпоночного паза сегментных шестерен должна быть больше ширины шпонки, чтобы обеспечить одновременное вхождение зубьев сегментных шестерен и шестерен 101 и 102 с зубьями шестерни 100.
Предлагаемые преобразователи движения, а также преобразователь движения, указанный в качестве прототипа, могут быть использованы в нефтедобывающих установках непосредственно без качалки. В этом случае шток преобразователя движения 109 соединяют тросом или непосредственно со штоком насоса, установленного в скважине.
При условии опускания поршня под собственным весом преобразователь движения может быть существенно упрощен.
Отпадает необходимость в муфте 104, шестерне 101, радиальном рычаге 106 и шатуне 108.
Шток 109 может быть установлен с нижней стороны и связан с тросом нефтеперерабатывающей установки непосредственно.
Предложенные преобразователи движения могут заменить широко применяемые в настоящее время кривошипно-шатунные преобразователи движения, в частности в нефтяных скважинах, транспортных средствах, возобновляемых источниках энергии, велосипедах, катамаранах, инвалидных колясках и т.д.
Применение предложенного преобразователя движения в приводах мощных нефтедобывающих насосов, которые работают круглосуточно на электродвигателях, поможет существенно сэкономить электрическую энергию в России и во всем мире.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕЛОСИПЕД (ВАРИАНТЫ) | 2009 |
|
RU2404901C2 |
| ШАГАЮЩАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2009 |
|
RU2404900C1 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА (ВАРИАНТЫ) | 2009 |
|
RU2387434C1 |
| ВОДНОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО | 2008 |
|
RU2361109C1 |
| КОЛЕБЛЮЩИЙСЯ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ (ВАРИАНТЫ) | 2008 |
|
RU2386855C1 |
| ВОЛНОВАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2008 |
|
RU2374484C1 |
| ВОЛНОВОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2373424C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ АЛИЕВЫХ | 2007 |
|
RU2349814C1 |
| ВОДНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2008 |
|
RU2370661C1 |
| ШАГАЮЩИЙ ВЕЗДЕХОД | 2007 |
|
RU2356775C2 |


Изобретение относится к машиностроению, а именно к механизмам для преобразования возвратно-поступательного движения во вращательное и наоборот. Преобразователь движения содержит двигатель с редуктором, качалку, два шатуна, две обгонные муфты, два радиальных рычага и кинематически связанные сегментную шестерню, первую и вторую шестерни. При этом зубья сегментной шестерни занимают менее половины делительной окружности, которые по очереди взаимодействуют с зубьями первой и второй шестерен, установленных на обоймах соответствующих обгонных муфт. Данные муфты неподвижно связаны с соответствующими радиальными рычагами, которые через соответствующие шатуны взаимодействуют с качалкой. Вместо качалки шатуны могут быть связаны со штоком. Решение направлено на упрощение конструкции, повышение надежности эксплуатации преобразователя возвратно-поступательного движения во вращательное и наоборот. 3 н. и 2 з.п. ф-лы, 6 ил.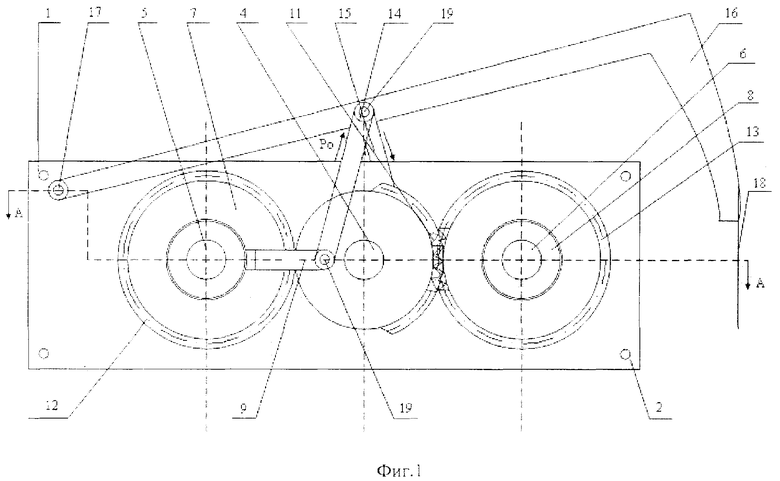
1. Преобразователь движения содержит двигатель с редуктором (3), два шатуна (14, 15), качалку (16), кинематически связанные сегментную шестерню (11), первую (12) и вторую (13) шестерни, обгонные муфты (7, 8), радиальные рычаги (9, 10), при этом зубья сегментной шестерни (11) занимают менее половины делительной окружности, которые по очереди взаимодействуют с зубьями первой (12) и второй (13) шестерен, установленных на обоймах соответствующих муфт (7, 8) неподвижно связанных с соответствующими радиальными рычагами (9, 10), при этом качалка (16) шарнирно связана с верхними наконечниками шатунов (14, 15).
2. Преобразователь движения по п.1, отличающийся тем, что качалка выполнена с дугообразным наконечником, при этом через качалку с противовесом перекинут трос (18), взаимодействующий с поршнем насоса нефтяной скважины.
3. Преобразователь движения содержит шток (30), два шатуна (28, 29), вал (20), первый (27) и второй (33) радиальные рычаги и шестерни (24, 25), шарнирно установленные на соответствующих осях (22, 23), а также первую (21) и вторую (34) обгонные муфты, ступицы которых неподвижно установлены на валу (20), а на обоймах муфт (21, 34) - первую (26) и вторую (35) шестерни, входящие в зацепление с третьей (24) и четвертой (25) шестернями, неподвижно связанными с соответствующими радиальными рычагами (27, 33), наконечники которых шарнирно соединены с наконечниками первого (28) и второго (29) шатунов, связанных со штоком (30), при этом обгонные муфты (21, 34) установлены на валу (20) так, чтобы при движении шатунов (28, 29) в ту или в другую стороны они входили в сцепление по очереди.
4. Преобразователь движения, содержащий кинематически связанные валы (97, 98, 99), центральную шестерню (100), шатуны (107, 108), обгонные муфты (103, 104), шестерни (101, 102), радиальные рычаги (105, 106), первую и вторую сегментные шестерни (110, 111) и шток (109), при этом на валах (98, 99) установлены взаимодействующие с центральной шестерней (100) первая (110) и вторая (111) сегментные шестерни и шестерни (101, 102), которые закреплены на обоймах муфт (103, 104), ступицы которых неподвижно установлены на указанных валах (98, 99) соответственно и взаимодействуют через радиальные рычаги (105, 106) и шатуны (107, 108) со штоком (109), установленным с возможностью возвратно-поступательного движения.
5. Преобразователь движения по п.4, отличающийся тем, что сегментные шестерни (110, 111) установлены на валах (98, 99) с возможностью поворота на угол, соответствующий модулю зуба.
| СИСТЕМА РЕВЕРСИВНОГО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЯМОЛИНЕЙНОЕ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 1992 |
|
RU2106553C1 |
| Поршневой двигатель внутреннего сгорания | 1988 |
|
SU1693272A1 |
| УСТРОЙСТВО ХРАНЕНИЯ И ПЕРЕДАЧИ ДАННЫХ С ИСПРАВЛЕНИЕМ ОДИНОЧНЫХ ОШИБОК В БАЙТЕ ИНФОРМАЦИИ И ОБНАРУЖЕНИЕМ ПРОИЗВОЛЬНЫХ ОШИБОК В БАЙТАХ ИНФОРМАЦИИ | 2011 |
|
RU2450331C1 |
| JP 57137761 A, 25.08.1982 | |||
| WO 2005052340 A1, 09.06.2005 | |||
| JP 61149525 A, 08.07.1986. | |||

