Изобретение относится к кривошипным механизмам, которыми производятся преобразования вращательных движений в качательные движения кривошипно-кулисными механизмами и в линейные возвратно-поступательные перемещения кривошипно-шатунными механизмами.
Названные преобразования производятся посредством применения сложных звеньев - кривошипов совместно с кулисами и шaтунами.
В предлагаемом изобретении "Эксцентриковый шатун" преобразование вращательного движения в качательное движение или в линейное возвратно-поступательное перемещение производится посредством применения более простого диска-эксцентрика в качестве кривошипа, выполняющего функции кривошипа и орбитально вращающегося вокруг оси вращения цельного цилиндрического вала.
Известны некоторые изобретения, в которых применялись эксцентрики в качестве кривошипов, но конструкция их оказалась сложной и малоэффективной, а поэтому их применение не превысило функциональных возможностей широко применяемых кривошипных механизмов, в результате чего они не применяются.
Например, наиболее близким аналогом к настоящей заявке на изобретение "Эксцентриковый шатун" является изобретение "Механизм взаимопреобразования вращательного и возвратно-поступательного перемещения" по патенту Великобритании GB 1517970, F 16 С 3/28, 19.07.1978 г. (далее механизм прототип).
Механизм прототип имеет вал 1 с консолью вала 2, разделенные кольцом 3. Вал 1 вставлен в подшипники с корпусами, закрепленными на каком-то основании, которое не показано. На консоль вала 2 насажены по скользящей посадки с зазором два эксцентрика 5 и 6 с переменным эксцентриситетом, который может быть предварительно установлен на одинаковую величину в противоположном направлении относительно оси вращения вала с помощью регулируемой посредством отвертки вручную оси 7, имеющей резьбовые концы с противоположным направлением резьбы (правой и левой) с каждой стороны от центрального кольца 26. Резьбовые концы оси 7 ввинчены в радиальные резьбовые отверстия 8 в выступах 24 эксцентриков 5 и 6, которые имеют удлиненные в радиальном направлении полупрямоугольные отверстия "в", имеющие длину "l" и высоту "w", которая больше диаметра консоли вала 2 на величину зазора скользящей посадки, а величину "l" - в несколько раз. Каждый эксцентрик 5 и 6 имеет два разных наружных диаметра с соответствующими цилиндрическими поверхностями. На цилиндрическую поверхность 18 меньшего диаметра одного эксцентрика 5 насажен подшипник 9, а на цилиндрическую поверхность 19 меньшего диаметра другого эксцентрика 6 насажен подшипник 10. На торцевой стороне каждого эксцентрика с большим диаметром имеется выступ 24 с радиальным резьбовым отверстием 8 и скользящим каналом 25, обеспечивающие совместным соединением типа "ласточкин хвост" совместное соединение и совместное вращение двух эксцентриков 5 и 6 вокруг оси вращения консоли вала 2, которая пустотелая, имеет внутреннюю полость крестообразного сечения с вертикальном каналом и прорезью 15. Полый конец консоли вала 2 имеет резьбовую нарезку 17. Эксцентрик 5 и 6 соединены между собой осью 7, которая вставляется при сборке средним кольцом 26 в крестообразную полость пустотелой консоли вала 2 и фиксируется в нужном положении посредством паза 28 деталью 14 тоже крестообразного сечения,
На фиг. 4 механизм прототип показан в исходном статическом положении, когда центры эксцентриков 5 и 6 сведены к центру оси вращения вала, т. е. нулевой эксцентриситет. В таком положении эксцентрики 5 и 6 не являются эксцентриками, а являются простыми дисками с разными диаметрами и с удлиненными в радиальном направлении полупрямоугольными отверстиями, имеющими длину "l" и высоту "w". На наружный диаметр подшипника 9 насажена круглой частью тяга 11, а на наружный диаметр подшипника 10 насажена круглой частью тяга 12. На зауженных концах тяг 11 и 12 шарнирно подсоединены поршни 20, которые предназначены для ввода их в собранном виде в цилиндрические полости 21 и 22 в общем корпусе 23. Bсe детали тоже в собранном виде вместе с дисками 4 и 13 насажены на пустотелую консоль вала 2 по скользящей посадке, предварительно отрегулированы вручную осью 7 на нужный эксцентриситет, стянуты вдоль консоли вала 2 в единую конструкцию посредством гайки 16 и резьбы 17. Диски 4 и 13 имеют уплотнение в кольцевой проточке 29, соприкасаемой с торцевой поверхностью меньших диаметров цилиндрических поверхностей 18 и 19, и внешнее уплотнение в кольцевой проточке 30, соприкасаемой с торцевой поверхностью на тягах 11 и 12.
В описании механизма прототипа работа не рассказана, но он работает следующим образом.
При вращении вала 1 от привода (не показан) с эксцентриками 5 и 6, установленными в положении " нулевого" эксцентриситета, поршни 20 находятся на одном уровне, механизм работает в режиме холостого хода и не оправдывает своего назначения.
При необходимости рабочего хода поранен 20 механизм обязательно останавливают, вынимают поршни 20 из цилиндрических полостей 21 и 22 корпуса 23, ослабляют гайку 16 и, вращая вручную отверткой паз 27 оси 7 на определенное число оборотов, устанавливают нужный размер эксцентриситета 5 и 6 и закрепляют весь механизм гайкой 16. Только после этого снова поршни 20 вводят в цилиндрические полости 21 и 22 корпуса 23, после чего механизм становится работоспособным.
При вращении вала 1 от привода консоль вала 2, воздействуя кромками прорези 15 перпендикулярно на резьбу оси 7 и вращая тем самым ось 7 перпендикулярно оси вращения консоли вала 2, вращает резьбовыми концами одновременно соединенные вместе два эксцентрика 5 и 6 вокруг оси вращения вала 1 и консоли вала 2 с соответствующим установленным эксцентриситетом. Круглая часть каждой тяги 11 и 12, вращаясь на подшипниках 9 и 10 вокруг эксцентриков 5 и 6, преобразует величину эксцентриситета в размер рабочего хода поршней, т. е. происходит взаимопреобразование вращательного движения вала 1 в возвратно-поступательное перемещение поршней 20.
Единственным достоинством механизма прототипа является возможность использования переменного эксцентриситета, в пределах от нуля до определенного размера, ограниченного длиной "l" полупрямоугольного отверстия "в" каждого эксцентрика 5 и 6. В то же время механизм обладает множеством непреодолимых недостатков, которые не позволили применить его в машиностроении.
Механизм прототип имеет следующие непреодолимые недостатки:
1. Максимальный размер эксцентриситета Lmax равен
Lmax= (l-dк.в),
где l - размер длины полупрямоугольного отверстия;
dк.в - диаметр консоли вала 2.
Поэтому максимальный ход поршней равен S= 2Lmax, который ограничен длиной "l" и может быть увеличен только посредством увеличения полупрямоугольного отверстия "в" в радиальном направлении. Поэтому при необходимости увеличения эксцентриситета даже на незначительную величину потребуется увеличение двойной величины диаметра меньшего, на которые насажены подшипники 9 и 10. Потребуется увеличение соответствующей радиальной длины резьбовых концов оси 7, резьбовых радиальных отверстий 8 и длины выступов 24 и скользящих каналов 25, т. е. еще большего увеличения больших диаметров эксцентриков 5 и 6. Следовательно, произойдет несоизмеримое увеличение габаритов и общей массы эксцентриков 5 и 6, подшипников 9 и 10, тяг 11 и 12, суммарный вес которых сосредоточен на слабой резьбовой оси 7, соединяющей эксцентрики 5 и 6, центры тяжести которых искусственно удалены от оси вращения пустотелой консоли вала 2. При этом радиус центра тяжести эксцентриков 5 и 6 относительно оси вращения консоли вала 2 больше эксцентриситета за счет наличия пустоты радиального полупрямоугольного отверстия "в", а суммарный вес эксцентриков 5 и 6, подшипников 9 и 10, тяг 11 и 12, поршней 20 с их противодействующими знакопеременными сопротивлениями, сосредоточен на удлиненных концах оси 7. Следовательно, резьбовые концы оси 7 являются удлиненными физическими радиусами кривошипа, аналогично радиусам кривошипов в кривошипно-кулисных или в кривошипно-шатунных механизмах, а эксцентрики 5 и 6 выполняют функции концевых шарниров или "камней" в кривошипных механизмах, у которых центры вращения кривошипов и валы вынесены за пределы кулис и шатунов, а резьбовые концы оси 7 и консоль вала 2 помещены внутри пустотелых полупрямоугольных отверстий "в", только в этом и разница, а физические действия их всех аналогичны.
2. Эксцентрики 5 и 6 жестко связаны с пустотелой консолью вала 2 только посредством резьбовой оси 7. Поэтому и крутящий момент, переданный со стороны привода или со стороны всех упомянутых суммарных масс всех деталей и узлов и сопротивлений со стороны поршней 20, воспринимаются двумя концами резьбовой оси 7. При этом точками приложения сил крутящих моментов, действующих на резьбу оси 7 перпендикулярно, являются радиусы кромок прорезей 15 пустотелой консоли вала 2. Силы от суммарных масс эксцентриков 5 и 6, подшипников 9 и 10, тяг 11 и 12 и их поршней 20 с сопротивлениями, умноженные на радиусы концов резьбовой оси 7, не соизмеримы с моментом сил, умноженных на радиусы кромок прорези 15 пустотелой консоли вала 2. Таким несоизмеримым силам по величине сопротивляется только площадь поперечного сечения внутреннего диаметра резьбы "d1" оси 7, которая должна преодолеть суммарные напряжения: от среза, от изгиба, от напряжения на разрыв, а при вращении вала от центробежных сил всех суммарных масс и сопротивлений, приложенных к концам резьбовой оси 7. Поэтому механизм прототип является маломощным, а число оборотов вала в единицу времени только наименьшее, так как центробежные силы от суммарных масс находятся в прямой квадратичной зависимости от числа оборотов их вокруг оси вращения вала 1 от радиуса концов резьбовой оси 7 и от суммарного веса всех вращающихся узлов и деталей.
3. Механизм прототип консольный, т. е. он может быть смонтирован только на одной консоли с одной стороны вала, так как с другой стороны вала 1 насажены корренные подшипники и средства силового привода, посадочные диаметры деталей которых меньше диаметра кольца 3. Консольное размещение всего механизма на одной пустотелой консоли вала 2 определено оборкой механизма только со стороны конца консоли вала 2. Поэтому механизм прототип не может быть размещен по всей длине вала 1.
4. При консольной конструкции механизма прототипа, как со стороны привода, так и со стороны поршней 20 с их сопротивлениями, создает опрокидывающий момент, который равен величине всех суммарных сил и сопротивлений, умноженных на плечо, равное от середины длины консоли вала 2 до первого коренного подшипника, установленного за кольцом 3 со стороны привода.
5. Механизм прототип работоспособен только при наличии двух эксцентриков 5 и 6, соединенных в одно целое совместно сложным соединением, содержащим пустотелую консоль вала 2 с крестообразной внутренней полостью, крестообразную деталь 14, резьбовую ось 7, соединяющую два сложных узла типа "ласточкин хвост", гайку 16 и резьбу 17, посредством которых все детали и узлы стянуты в один механизм.
6. Механизм прототип ограничен в размерах его выполнения, так как увеличение конструкции ведет к несоизмеримому увеличению его габаритных размеров и масс вращающихся и движущихся узлов и деталей, а уменьшение конструкции ограничено невозможностью уменьшения и изготовления диаметра пустотелой консоли вала 2 в внутренней полостью крестообразного сечения для размещения в ней резьбовой оси 7.
7. В описании механизма прототипа упоминается, что он предназначен для объемного измерения жидкостей и газов. Однако противоположное несоответствие между площадью поршней 20 и их ограниченным малым рабочим ходом ограничивает его целевое назначение, чем подтверждается маломощность механизма.
В настоящей заявке на изобретение "Эксцентриковый шатун" предлагается простейшая конструкция механизма, который исключает все перечисленные недостатки и обладает множеством достоинств, более мощный и эффективный.
Эксцентриковый шатун показан на прилагаемых к описанию семи чертежах, на девяти фигурах.
На фиг. 1 показан эксцентриковый шатун в разрезе по А-А на фиг. 2.
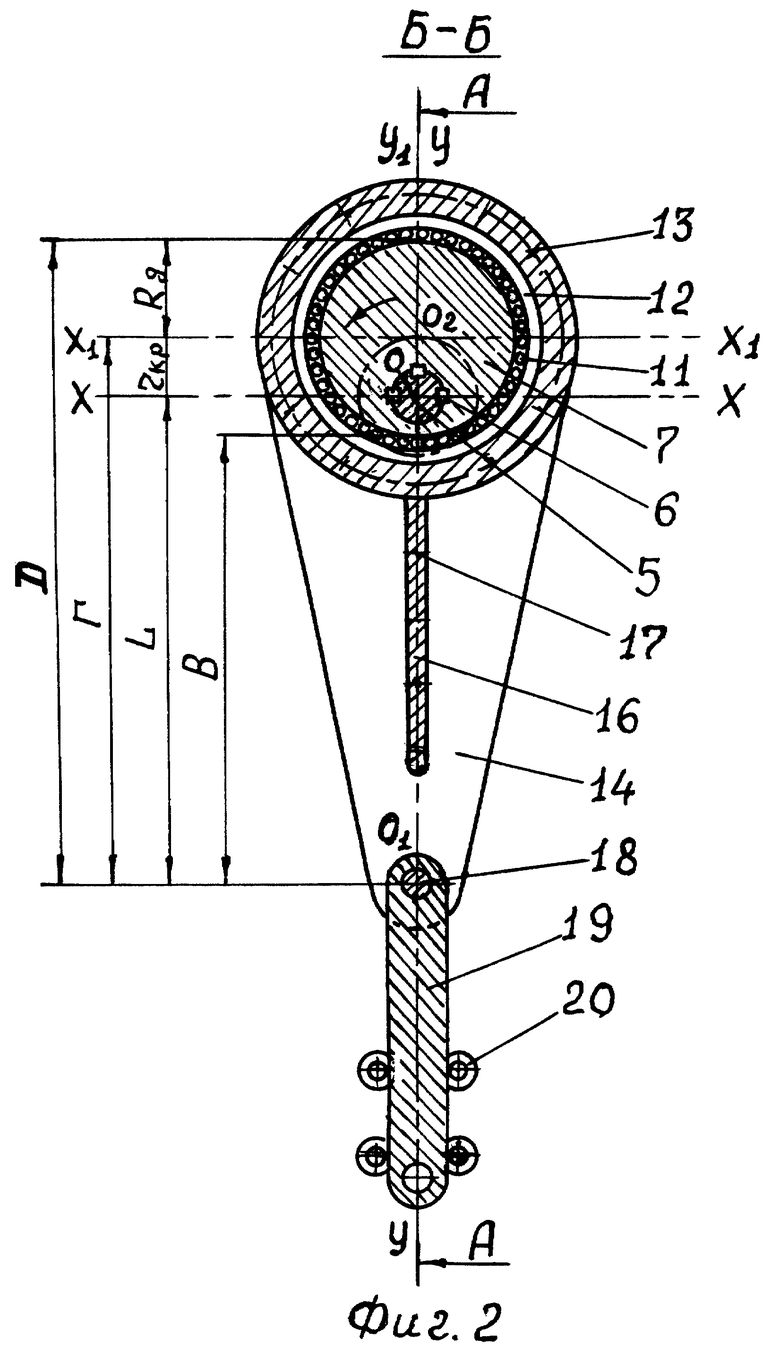
На фиг. 2 показан эксцентриковый шатун в разрезе по Б-Б на фиг. 1.
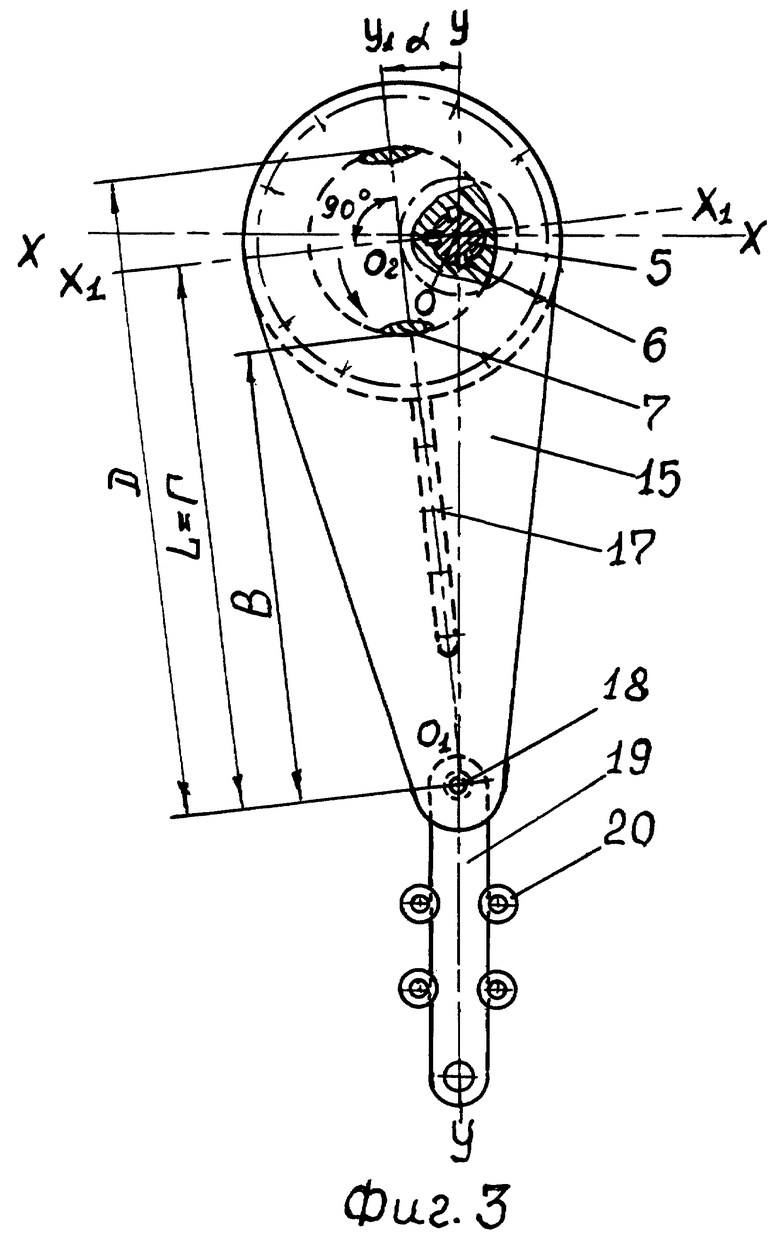
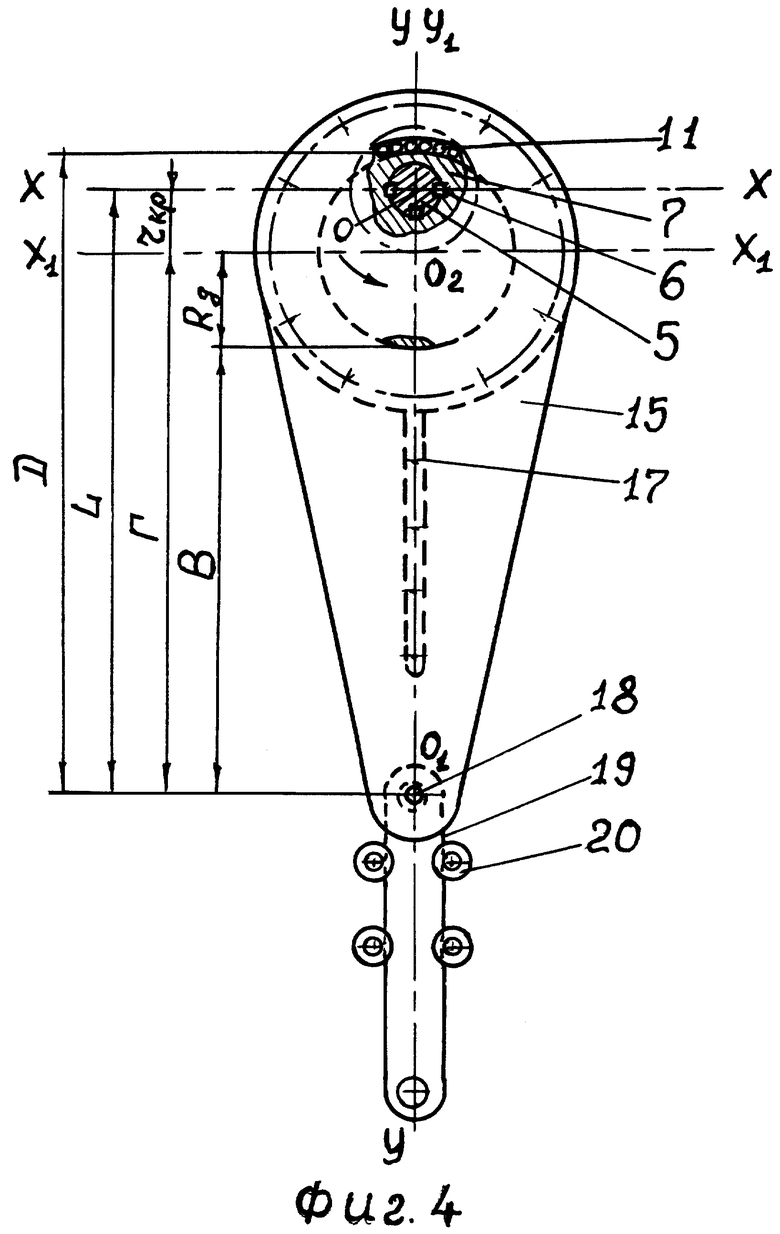
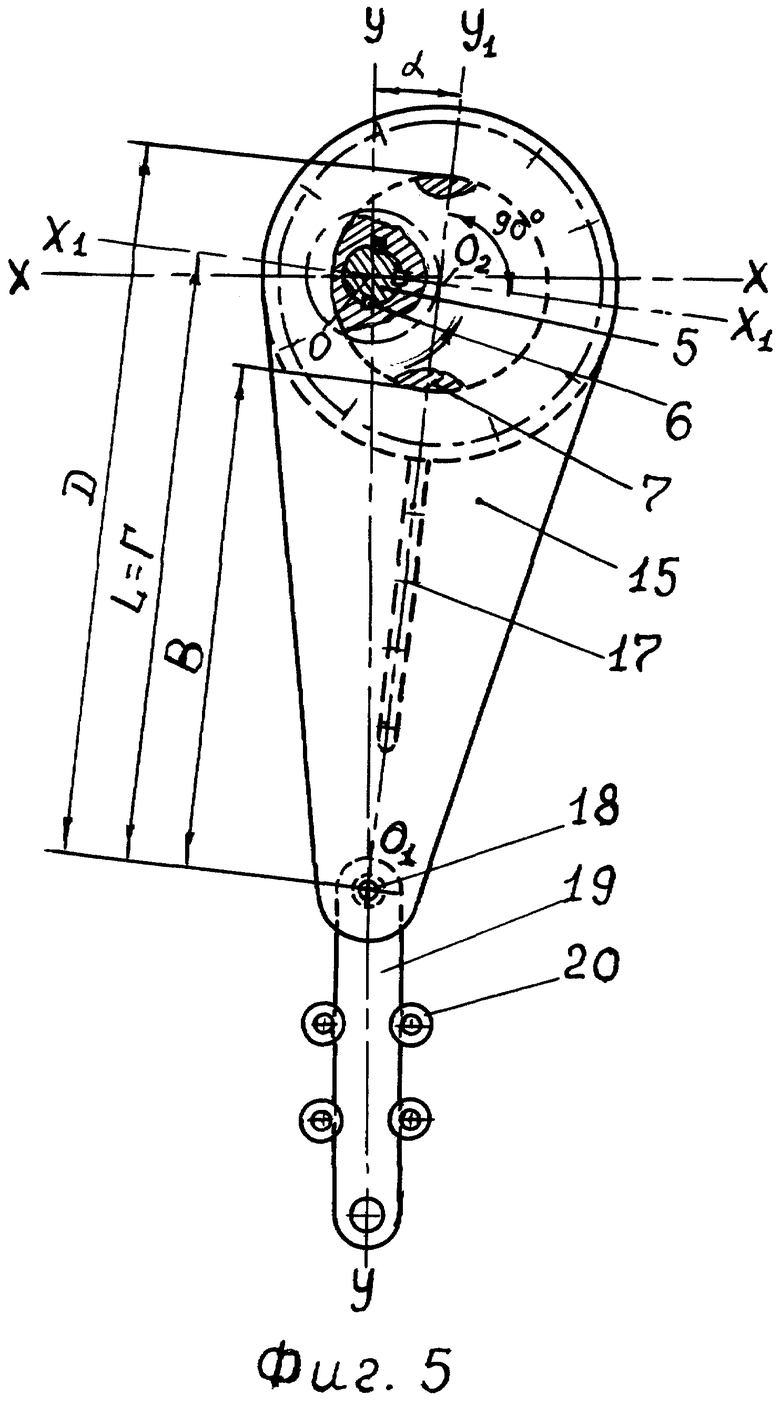
На фиг. 3, 4, 5 показаны различные рабочие положения эксцентрикового шатуна во время работы через каждую примерную четверть оборота ведущего вала с диском-эксцентриком.
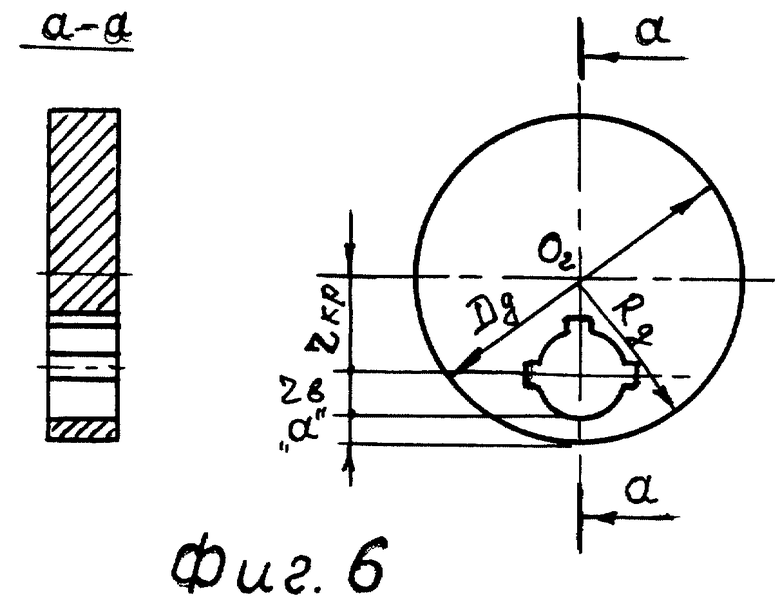
На фиг. 6 показан диск-эксцентрик.
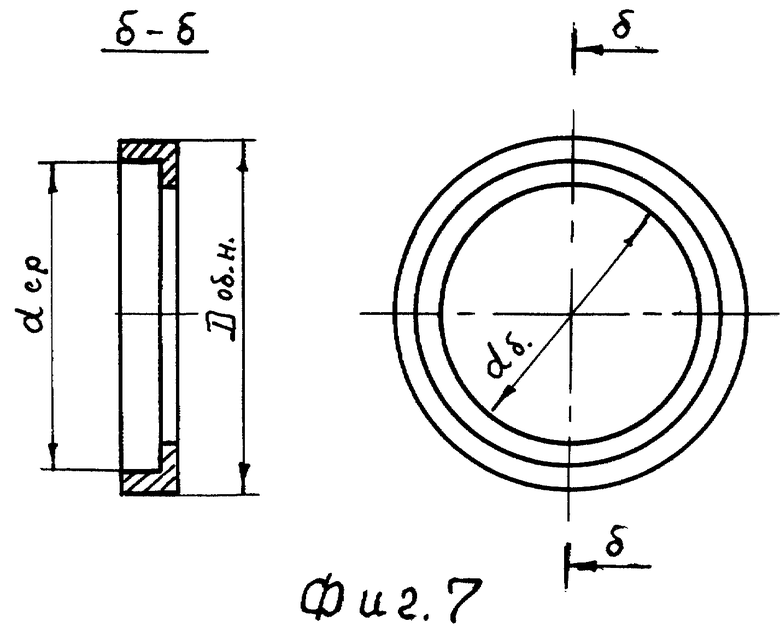
На фиг. 7 показана обойма.
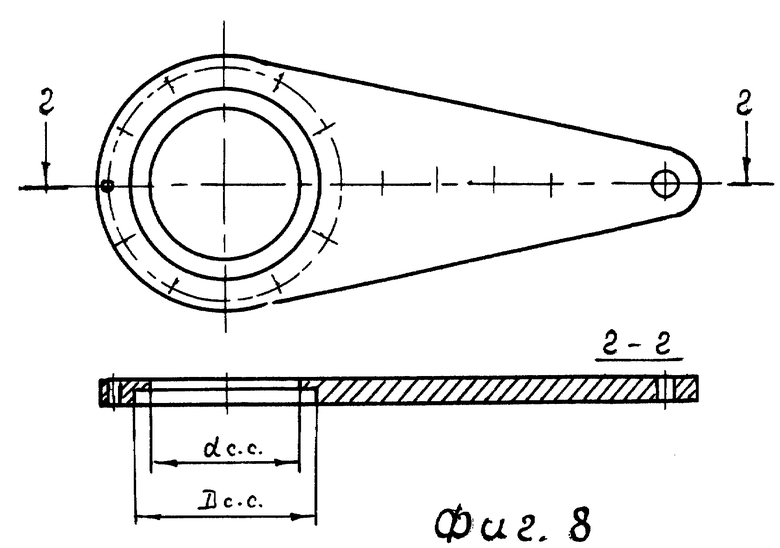
На фиг. 8 показана сквозная силовая стенка.
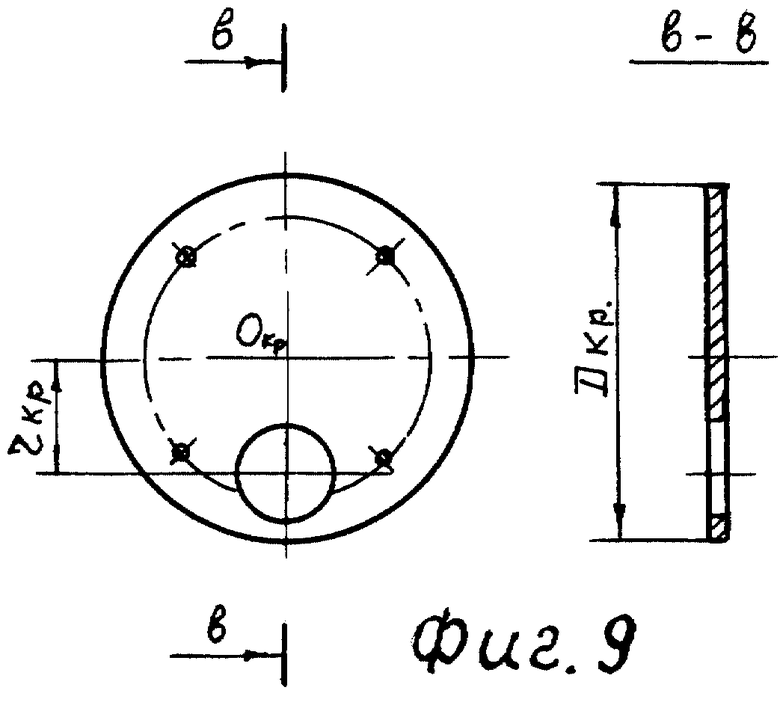
На фиг. 9 показана крышка диска-эксцентрика.
Эксцентриковый шатун содержит основание в виде фундаментной рамы 1, на которой прикреплены корпуса 2 с подшипниками 3, закрытые крышками 4. В подшипники 3 вставлен цельный цилиндрический вал 5, на левой консоли которого закрепленный шпонками 6 насажен диск-эксцентрик 7 с закрепленной на нем крышкой 8, а от осевого смещения вдоль вала 5 диск-эксцентрик дополнительно зафиксирован шайбой 9 и винтами 10.
Диск-эксцентрик 7 (отдельно показан на фиг. 6) имеет круглое отверстие с шпоночными канавками (на чертеже их три). Центр круглого отверстия смещен от центра O2 диска-эксцентрика 7 на расстояние эксцентриситета, которое является радиусом кривошипа, в качестве кривошипа которого применен диск-эксцентрик 7 диаметром Dg, радиусом Rg. При этом радиус диска- эксцентрика 7 Rg больше суммы радиуса кривошипа rкр и радиуса вала 5 rв на величину оставшейся перемычки "а", от площади сечения которой определяется наружный диаметр Dg и радиус Rg диска-эксцентрика 7.
На поверхности наружного диаметра диска-эксцентрика 7 размещены ролики 11, охваченные двумя обоймами 12 (отдельно обойма 12 показана на фиг. 7). Обоймы 12 охватывают ролики 11 средним диаметром dср, монтируются с двух сторон диска-эксцентрика 7, с целью упрощения монтажа и демонтажа роликов 11, ограничивая их от продольного смещения посредством бортиков, имеющих диаметр dб меньше среднего диаметра dср, охватывая тем самым заодно боковые кромки плоскости диска-эксцентрика 7, с возможностью свободного вращения его и вала 5, чем заодно и сами фиксируются относительно боковых плоскостей диска-эксцентрика 7 с необходимым осевым зазором. На наружные диаметры Dоб.н двух обойм 12 насажены кольцевой корпус 13 и с двух сторон силовые стенки 14 и 15. Силовая стенка 14 (показана на фиг. 8) имеет сквозное отверстие с диаметром dc.с, равным диаметру dб бортиков обоим 12 и расточной диаметр Dс.с, которыми силовые стенки 14 и 15 насаживаются на наружный диаметр Dоб.н обойм 12. Между двух силовых стенок 14 и 15 закреплено ребро жесткости 16. Силовая стенка 15 аналогична силовой стенке 14 по всем размерам, но она глухая, т. е. не имеет сквозного отверстия диаметром dc.с.. Кольцевой корпус 13, силовые стенки 14, 15 и ребро жесткости 16 стянуты в единую жесткую конструкцию винтами 17.
На фиг. 9 показана крышка 8 диска-эксцентрика 7, которая имеет круглое отверстие, центр которого смещен от центра крышки Окр на расстояние, равное радиусу кривошипа rкр, например, четырьмя отверстиями крышка крепится винтами к диску-эксцентрику 7, а сквозь эксцентриситетное круглое отверстие проходит вал 5. Наружный диаметр крышки Dкp меньше диаметра dб бортиков обойм 12 и сквозного диаметра dc.с силовой стенки 14 на соответствующее уплотнительное кольцо (на чертеже не показано, чтобы не усложнять чертежи мелкими подробностями).
Силовые стенки 14 и 15 выполнены с зауженными концами с отверстиями, в которые вставлена общая ось 18, шарнирно соединенная с шатуном 19, который, с возможностью поворота вокруг центра О1 оси 18 и с возможностью продольного перемещения, ограничен от поперечных перемещении роликами 20, вращающимися вокруг зафиксированных осей 21. На противоположном конце шатуна 19 имеется свободное отверстие для возможности подсоединения какого-либо последующего звена или механизма. К общей оси 18 может быть шарнирно подсоединено и какое-либо другое исполнительное звено, например поршень.
В кольцевой объем, в котором размещены ролики 11, залито машинное масло до оптимального уровня.
На фиг. 1 и фиг. 2 показан эксцентриковый шатун в статическом состоянии в момент, когда центр О2 диска-эксцентрика 7, центр О продольной оси О-О вращения цилиндрического вала 5, продольная ось силовых стенок 14 и 15 и продольная ось шатуна 19 расположены на одной вертикальной оси Y-Y. Центр О оси вращения О-О цилиндрического вала 5 находится на пересечении вертикальной оси Y-Y и горизонтальной оси X-Х. Центр O2 диска-эксцентрика находится на пересечении вертикальной оси Y-Y и горизонтальной оси X1-X1 выше оси X-Х на расстоянии радиуса кривошипа rкр.
Буквой В обозначено расстояние от центра О1 оси 18 до нижней точки диска-эксцентрика 7.
Буквой L обозначено расстояние от центра О1 оси 18 до центра О оси вращения вала 5, т. е. до оси X-X.
Буквой Г обозначено расстояние от центра О1 оси 18 до центра О2 диска-эксцентрика 7, т. е. до оси X1-X1.
Буквой Д обозначено расстояние от центра O1 оси 18 до наивысшей диаметральной точки диска-эксцентрика 7.
В данном положении расстояние Г равно сумме расстояния L и радиуса кривошипа rкр, т. е. Г= L+rкр.
Расстояние Д равно сумме расстояния Г и радиуса Rg диска-эксцентрика 7. Или расстояние Д равно сумме расстояния L, радиуса кривошипа rкр и радиуса Rg диска-эксцентрика 7, т. е. Д= L+rкр+Rg.
Имеется еще дополнительная ocь Y1-О1, которая на фиг. 2 совмещена с вертикальной осью Y-Y.
Эксцентриковый шатун работает следующим образом.
При вращении цилиндрического вала 5 вокруг продольной оси О-О закрепленный на валу 5 диск-эксцентрик 7 тоже вращается вокруг оси О-О вала 5 таким образом, что его центр О2 орбитально перемещается вокруг оси О-О вала 5 по окружности с радиусом кривошипа rкр.
Так как цилиндрический вал 5 зафиксирован в подшипниках 3 c возможностью вращения только вокруг собственной оси О-О, а центр О1 оси 18 с возможностью перемещения только вдоль вертикальной оси Y-Y зафиксирован от боковых перемещений шатуном 19, роликами 20 и зафиксированными осями 21, то вся верхняя круглая часть конструкции отклонится в соответствующую боковую сторону, в зависимости от направления вращения цилиндрического вала 5. Например, на чертежах стрелками указано направление вращения вала 5 против часовой стрелки. Toгдa центр О2 диска-эксцентрика 7, двигаясь орбитально по окружности с радиусом кривошипа rкр, верхнего положения выше вала 5 (на фиг. 2), переместится влево и вниз относительно центра О оси вращения вала 5, отклоняя всю верхнюю часть конструкции на соответствующий угол качания относительна центра О1 оси 18. При этом отклонится ось Y1-О1 относительно оси О1 на соответствующий угол α. На такой же угол наклонится и ось X1-X1, строго перпендикулярная оси Y1-О1, одновременно опускаясь вниз.
На фиг. 3 показан момент, когда ось Y1-О1 повернулась относительно центра О1 оси 18 на максимальный угол α, а угол между осью Y1-О1 и радиусом кривошипа стал равен 90o. Ocь X1-X1, разворачиваясь и опускаясь, совместилась с центром О оси вращения вала 5. В этот момент вся жесткая конструкция эксцентрикового шатуна опустилась относительно центра О оси вращения вала 5, передвинув зауженный конец стенок 14 и 15 с общей осью 18 и шатун 19 вдоль вертикальной оси Y-Y на величину радиуса кривошипа rкр. При этом расстояния - B, Г и Д строго сохранили свои размеры неизменяемой конструкции, а расстояние L увеличилось и уравнялось с расстоянием Г, т. е. L= Г.
На фиг. 4 показан момент, когда, при последующем повороте вала 5, ось Y1-О1 совместилась с вертикальной осью Y-Y. Ocь X1-X1, опускаясь, развернулась и приняла положение параллельно оси Х-Х ниже ее и вала 5 на расстояние радиуса кривошипа rкр. Центр О2 диска-эксцентрика 7, двигаясь орбитально по окружности с радиусом кривошипа rкр вокруг центра О оси вращения вала 5, достиг вертикальной оси Y-Y. Вся конструкция эксцентрикового шатуна опустилась относительно центра О оси вращения вала 5, передвинув ось 18 и шатун 19 вдоль вертикальной оси Y-Y еще на величину радиуса кривошипа rкр. Следовательно, за полоборота вала 5 произошло одностороннее левое качание верхней части эксцентрикового шатуна, повернувшись относительно центра O1 оси 18, и односторонний полный ход зауженного конца стенок с общей осью 18 и с шатуном 19 вниз, равный двум радиусам кривошипа, т. е. S= 2rкр. При этом расстояния - В, Г и Д строго сохранили свои размеры, а расстояние L увеличилось еще на величину радиуса кривошипа, т. е. расстояние L от положения на фиг. 2 до положения на фиг. 4 тоже увеличилось на величину полного хода, равного двум радиусам кривошипа, т. е. S= 2rкр.
На фиг. 5 показан момент, когда, при последующем повороте вала на соответствующую часть оборота вала 5, ось Y1-О1, повернувшись относительно центра оси 18, отклонилась вправо на максимальный угол α, ось Y1-О1 совместилась с центром О оси вращения вала 5, а угол между осью Y1-О1 и радиусом кривошипа rкр, совпавший с направлением оси X1-X1, стал равен 90o, а центр О2 диска-эксцентрика 7, двигаясь по окружности с радиусом кривошипа rкр, достиг оси X1-X1. Расстояния В, Г и D неизменно и строго сохранили свои размеры, а расстояние L убавилось на величину радиуса кривошипа и сравнялось с расстоянием Г, т. е. L= Г.
При полном повороте вала вокруг оси О-О на 360o эксцентриковый шатун окажется в первоначальном положении, показанном на фиг. 2. Далее все повторяется.
Как видно из описания конструкции и работы, эксцентриковый шатун не имеет недостатков механизма прототипа, обладает множеством достоинств и наибольшей мощностью при передаче максимального крутящего момента, как со стороны привода, так и со стороны исполнительного звена или механизма. Это определяется тем, что средства жесткого крепления диска-эксцентрика на цельном цилиндрическом валу 5 находятся в одной плоскости с диском-эксцентриком 5, с силовыми стенами 14 и 15, соединенными воедино ребром жесткости 16 и с исполнительным звеном или с исполнительным механизмом. В то время как у механизма прототипа средства переменного крепления двух совместных дисков 5 и 6 к консоли вала 2 выполнено посредством слабого резьбового стержня 7 в одной плоскости, подшипники 9 и 10, тяги 11 и 12 с поршнями 20 расположены в другой плоскости. При этом эксцентриковый шатун выполняет все функциональные возможности механизма прототипа на более высоком техническом уровне и с наибольшей эффективностью.
Как видно из описания работы, эксцентриковый шатун также выполняет все функциональные возможности кривошипно-кулисных механизмов с качающейся кулисой, преобразуя вращательное движение цельного цилиндрического вала в качательные движения, и функциональные возможности кривошипно-кулисного механизма с поступательно движущейся кулисой и функциональные возможности кривошипно-шатунного механизма, преобразуя вращательное движение цельного цилиндрического вала в линейное возвратно-поступательное перемещение исполнительного звена.
Следовательно, один эксцентриковый шатун при работе может выполнить работу четырех механизмов - механизма прототипа и трех упомянутых кривошипных механизмов. При этом исключаются почти все их недостатки, сохраняются их достоинства и дополнительно эксцентриковый шатун обладает новыми, присущими только ему, достоинствами и преимуществами в различных видах эффективности и технических максимальных возможностей.
Например, сохраняется полезное во многих случаях применения отношение времени обратного хода к времени прямого хода, т. е. Тох: Тп.х= 1. Длина хода конца силовых стенок с общей осью 18 и с шатуном 19 равна величине двух радиусов кривошипа, т. е. S= 2rкр, что соответствует рабочему ходу кривошипно-шатунного механизма и кривошипно-кулисного механизма с поступательно движущейся кулисой.
Эффективность применения эксцентрикового шатуна в промышленности широко определяется сопоставительным анализом между основными недостатками широко применяемых кривошипных механизмов и сравнительными достоинствами эксцентрикового шатуна.
Основными недостатками кривошипных механизмов являются:
1. Основным элементом для преобразования вращательного движения в качательное или в возвратное прямолинейно-поступательное перемещение в кривошипных механизмах являются коленчатые валы различных конструкций. Но все они имеет общую ось вращения, которая прерывается коленами с шейками, оси которых смещены от общей оси на величину радиуса кривошипа. Изготовить коленчатый вал неразборной конструкции создает большие трудности и обходится слишком дорого.
2. Шейка колена соединяется с шатуном чаще посредством подшипника скольжения. Установить подшипник качения на шейку колена коленчатого вала неразборной конструкции невозможно.
3. Ограниченная контактная площадь подшипников скольжения ограничивает величину усилия передаваемого шейкой колена шатуну или наоборот.
4. Шатун "пересекает" общую ось вращения коленчатого вала при каждом его обороте.
5. Зависимость воспринимаемых или передающих усилии шейкой колена шатуну, или наоборот, от углов поворота кривошипа и шатуна.
6. Уравновешивание коленчатого вала во время его вращения преодолевается с большими трудностями и сложными устройствами.
Достоинства эксцентрикового шатуна.
1. В эксцентриковом шатуне в центре вращения кривошипа применен цельный цилиндрический вал 5, который изготовить проще, быстрее, дешевле, не представляет никаких трудностей, он несравнимо прочнее коленчатого вала.
2. На фиг. 1 эксцентриковой шатун показан консольным, т. е. закреплен жестко на левой консоли вала 5 посредством, например, нескольких шпонок для передачи максимальных крутящих моментов. Однако эксцентриковый шатун можно жестко закрепить на любом месте цельного цилиндрического вала 5 по всей его длине. Для этого достаточно глухую стенку 15 заменить силовой стенкой 14 с дополнительной крышкой 8. Следовательно, на одном валу при необходимости можно жестко закрепить несколько эксцентриковых шатунов, что и будет применено при монтаже привода механической лестницы.
3. На фиг. 1 правая консоль вала 5 показана свободной. При эксплуатации одного или нечетного количества эксцентриковых шатунов на одних совместных цельных цилиндрических валах 5 должен быть до четного количества добавлен соответствующий противовес. Наиболее эффективно будет применяться эксплуатация четного количества эксцентриковых шатунов. При этом диски-эксцентрики 7 у каждой их пары на совместных общих валах у каждого соседнего должны быть повернуты и закреплены у одних относительно соседних других дисков-эксцентриков 7 на угол 180o. Тогда просто решается проблема уравновешивания эксцентриковых шатунов. Уравновешивание эксцентриковых шатунов нечетного количества, но делящегося на три, достигается путем поворота каждого соседнего шатуна на угол 120o.
4. Известно, что в кривошипных механизмах при вращении кривошипов, в моменты "мертвых" положений, знаки действия сил на шейки кривошипов и направления движения шатунов с исполнительными звеньями меняются на противоположные при каждом полуобороте кривошипного вала, а прилагаемые силы действуют знакопеременно: то с одной стороны вала, то с другой стороны при каждом полуобороте вала.
При работе эксцентрикового шатуна при каждом полуобороте цельного цилиндрического вала 5 меняется направление движения исполнительного звена на противоположное, а приложение сил на вал 5 происходит только с одной стороны.
При совместной взаимосвязанной между собой работе общего количества эксцентриковых шатунов, вращающихся в одну сторону, и все вращающиеся элементы общего привода, тоже вращающиеся в одну сторону, в целом обладают совместной инерцией, в качестве инерционных маховиков, посредством чего будут легко и безударно преодолеваться "мертвые" положения.
5. При вращении цельного цилиндрического вала 5 диск-эксцентрик 7 не "пересекает" ось вращения цилиндрического вала 5, а просто орбитально обходит ось вращения вала 5, строго сохраняя расстояния до центра качания О1 оси 18, что и подтверждается постоянством размеров расстояний В, Г и Д.
6. В условном разрыве цельного цилиндрического вала 5 между корпусами подшипников 2 (на фиг. 1) предполагается жесткое крепление на валу 5 элементов привода. Поэтому четное количество эксцентриковых шатунов может быть смонтировано на нескольких цельных цилиндрических валах, соединенных между собой соответствующими передачами в один общий привод, который будет приводиться во вращение от одного электродвигателя.
7. Крутящий момент от цилиндрического вала 5 передается диску-эксцентрику 7, который необходимой расчетной площадью поверхности наружного диаметра Dg передает силу крутящего момента иночеству роликов 11. Общая сила соответственно распределяется на соответствующее количество роликов 11. Каждый ролик 11 воспринимает или передает соответствующую часть силы от общей силы обойме 12 по нормали, направленной к центру О2 диска-эксцентрика 7. В зависимости от направления воспринимающих или передающих сил они распределяются на количество роликов 11, расположенных на площади, длина которой равна половине развернутой дуги окружности наружного диаметра диска-эксцентрика 7. Этого количества роликов 11 вполне достаточно, чтобы воспринять или передать во много раз большее суммарное усилие, чем передается шейкой кривошипа коленчатого вала, а тем более несоизмерима передача усилия тонким резьбовым стержнем 7 в механизме прототипе. Например, центральной кривошипно-шатунный механизм часто используется в прессах и других машинах для получения более значительных сил на ползуне при подходе его к "мертвому" положению, при котором ползун останавливается и меняет направление движения на противоположное. Сила на шейке колена коленчатого вала, в моменты "мертвых" положений, направлена перпендикулярно продольной оси шатуна и, преодолевается моментом равного произведению силы на радиус кривошипа, соединенного шарнирно с шатуном, когда угол между шатуном и направлением движения ползуна равен нулю или около нуля.
Сила приложенная к центру О2 диска-эксцентрика 7 эксцентрикового шатуна в моменты "мертвых" положений тоже перпендикулярна продольной оси эксцентрикового шатуна, но действие этой силы происходит с одновременным отклонением всей верхней части эксцентрикового шатуна вокруг центра оси 18 на соответствующий угол качания α, чем увеличивается абсолютная угловая скорость движения центра О2 диска-эксцентрика 7 вокруг оси О-О вращения вала 5, своим внешним диаметром катится на роликах и вкручивается или выкручивается в них или из них, с меньшим усилием преодолевает сравнительно небольшой подъем по наклону, у которого высотой наклона является радиус кривошипа, а длиной наклона является развернутая длина дуги, равная половине дуги развернутой окружности наружного диаметра диска-эксцентрика 7. Все это определяет высокий КПД эксцентрикового шатуна по сравнению КПД кривошипных механизмов.
Следовательно, прессы и другие машины, оснащенные приводами с эксцентриковыми шатунами будут мощнее и эффективнее при меньших затратах энергии.
Перечисленные далеко не полностью достоинства, функциональные возможности и отличительные признака эксцентрикового шатуна дают все основания предполагать, что уже в ближайшем будущем эксцентриковый шатун должен заменить кривошипные валы на многих широко применяемых машинах, во многих областях техники, где применяются кривошипные механизмы, так как эксцентриковый шатун, по сравнению с известными кривошипными механизмами, проще и компактнее по конструкции, проще при эксплуатации, дешевле и быстрее при изготовлении, долговечнее в работе, может быть изготовлен в любых размерах, а по мощности при соответствующих размерах превысит известные кривошипные механизмы.
Широкое применение "Эксцентрикового шатуна" должно быть в первую очередь в составе приводов "Механических лестниц", на которые были выдана пять авторских свидетельств СССР: М. кл. В 66 3 21/08 - 1248928 (46) 07.08.86. Бюл. 29: 1341141 (46) 30.07.87. Бюл. 36: 137737 (46) 29.02.88 Бюл. 8: 1495258 (46) 23.07.89 Бюл. 27: 1684223 (46) 15.10.91. Бюл. 38.
Механическая лестница пока только теоретически признана новым видом вертикального транспорта.
В нерабочем состоянии она представляет собой обычную стационарную лестницу, которую видят и пользуются ею жители многоэтажных домов в каждом подъезде. Каждый марш механической лестницы содержит чередующиеся подвижные и неподвижные ступени, которые во время работы попеременно уравниваются между собой или с этажными и междуэтажными площадками, перемещаются вертикально по закону гармонических колебании. В моменты уравниваний скорость вертикального перемещения подвижных ступеней равна нулю или около нуля. В эти моменты пассажиры переходят с предыдущих подвижных ступеней на последующие. Весовой принцип работы механической лестницы посредством вертикально возвратных перемещении взаимно уравновешенных подвижных ступеней в каждом марше на всех этапах позволяет производить подъем-спуск одними и теми же маршами одновременно на всех этажах непрерывный поток пассажиров разных категорий, пола, возраста, здоровья, интеллектуальных возможностей. Потоки пассажиров могут быть на одних и тех же маршах в виде двух встречных потоков или в виде одного потока вверх или вниз. Весовой принцип работы механической лестницы способствует тому, что расход электроэнергии на одного пассажира может быть в несколько раз меньше, чем расходуется при работе лифтов и в десятки раз меньше, чем расходуется при работе эскалаторов. Например, количество пассажиров, спускающихся вниз, своим весом и носимым с собою грузом будут "помогать" электроприводу "поднимать" такое же количество пассажиров поднимающихся вверх. Когда же количество пассажиров, спускающихся вниз, будет преобладать над количеством пассажиров, поднимающихся вверх, то двигатель электропривода будет работать в режиме генераторного торможения. Когда же количество пассажиров, поднимающихся вверх, будет преобладать над количеством пассажиров, опускающихся вниз, то расход электроэнергии будет только на преобладающее количество пассажиров.
Индивидуальный каркас механической лестницы, встроенной в подъезд здания или в виде предподъездной пристройки, или в виде отдельно стоящего сооружения, обеспечивает абсолютную безопасность пассажиров во время подъема-спуска и во время различных бедствий (пожарах, землетрясениях и т. д. ). Дешевая при строительстве, простая по конструкции и при эксплуатации и при обслуживании, сравнительно высокая производительность - все это позволит поставить вопрос о целесообразности дальнейшей эксплуатации существующих и вновь строящихся лифтов и даже эскалаторов, особенно на окраинах городов, где интенсивность потоков пассажиров значительно меньшая, а поэтому одна механическая лестница, обладающая двухсторонним движением потоков пассажиров, сможет заменить два-три эскалаторе с односторонним движением пассажиров. Механические лестницы, построенные в виде предподъездных пристроек позволят демонтировать лифты и стационарные лестницы, за счет которых высвободится площадь в каждом подъезде жилых зданий, посредством чего любой город сможет увеличить общую жилую площадь с минимальными затратами без изменения размеров зданий.
Однако до настоящего времени механические лестницы не внедрялись в жизнь общества по следующим причинам.
Знакопеременные вертикальные движения подвижных ступеней должны производиться строго по синусоидальному закону гармонических движений со средней скоростью от 0,15 м/с до 0,5 м/с, изменяясь от нудя до определенней скорости и от определенной скорости до нуля в моменты уравнивания проступей подвижных ступеней с проступями соседних неподвижных ступеней или с этапными и междуэтажными площадками, предоставляя тем самым в эти моменты возможность пассажирам переходить с предыдущих ступеней или площадок на последующие ступени или площадки. При этом привод механической лестницы должен быть таким, чтобы поднять максимально возможное число пассажиров в виде непрерывного потока, поднимающегося только одновременно вверх, когда приводу придется поднять одновременно общий вес пассажиров, преодолевая силу земного притяжения, или одновременно опустить всех пассажиров в виде непрерывного потока, одновременно опускающегося только вниз, когда приводу придется удерживать одновременно общий вес пассажиров, который под воздействием земного притяжения будет ускоренно двигаться вниз, а в момент cмeны знака в крайнем нижнем положении всех спускающихся подвижных ступеней с пассажирами должны быть погашены инерционные силы безударно и "мягко", чтобы пассажиры испытывали комфорт при подъеме-спуске без каких-либо силовых грубостей. Хотя и слишком редко, но суммарный вес одновременно поднимающихся-опускающихся пассажиров в некоторые моменты может исчисляться тоннами. Например, десятиэтажная механическая лестница может одновременно поднять-опустить 72 пассажира на десятый этаж за две-три минуты. Если учесть, что расчетный вес одного пассажира принят в России G= 80 кг, то общий вес составит Goб.= 80•72= 5760 кг.
В пяти вариантах механической лестницы согласно перечисленным авторским свидетельствам применены три варианта кривошипных механизмов, которые могут обеспечить вертикальные движения ступеней по синусоидальному закону гармонических движений, но, по многочисленным недостаткам кривошипных механизмов, они не пригодны к безударным перегрузкам, исчисляемым тоннами, не смогут обеспечить необходимые условия абсолютной безопасности подъема-спуска интеллектуального "живого" груза.
Поэтому "Механические лестницы" могут быть использованы человечеством только оснащенные приводами, в составе которых в необходимом количестве будут применены эксцентриковые шатуны, обладающие перечисленными и многими уникальными достоинствами, которые обеспечивают безударный "мягкий" режим работы в механизмах машин, в которых они будут применены, при этом будет меньше затрачено энергии.
Но еще более широкое применение эксцентриковый шатун возможно найдет в качестве замены кривошипных механизмов: в двигателях, движителях, в прессах, в металлорежущих или в других обрабатывающих станках. Это предположение подтверждается теоретическими расчетами, уникальными достоинствами и возможностями эксцентрикового шатуна, его высоким КПД и отсутствием подобных аналогов, обладающих такими же достоинствами и возможностями, какими обладает эксцентриковый шатун.
Общая сущность изобретения "Эксцентриковый шатун" может быть определена следующим образом.
Эксцентриковый шатун, содержащий диск-эксцентрик с круглым отверстием, посредством которого диск-эксцентрик насажен на цилиндрический вал и жестко закреплен на нем, при этом диск-эксцентрик связан средствами качения со звеном шатуна, связанным с исполнительном звеном, зафиксированным от поперечных перемещении и имеющим возможность линейного возвратно-поступательного перемещения, цилиндрический вал выполнен цельным с возможностью размещения и жесткого крепления на нем дополнительных дисков-эксцентриков на любом месте по всей длине вала, центр отверстия диска-эксцентрика смещен от центра этого диска на расстояние радиуса кривошипа и центр этого эксцентриситетного отверстия диска-эксцентрика совмещен с центром оси вращения цельного цилиндрического вала, при этом радиус диска-эксцентрика больше суммы радиуса кривошипа и радиуса вала, средства качения, например poлики, размещены на поверхности наружного диаметра диска-эксцентрика и охвачены обоймами, кольцевым корпусом и силовыми стенками, составляющими звено шатуна, причем эти стенки выполнена с зауженными концами с отверстиями, в которые вставлена общая ось шарнирного соединения звена шатуна с исполнительным звеном.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВЕРТИКАЛЬНО-ПОСТУПАТЕЛЬНОЕ ПЕРЕМЕЩЕНИЕ | 2000 |
|
RU2199045C2 |
| ГИДРОМАШИНА | 2002 |
|
RU2234617C2 |
| Механическая лестница | 1989 |
|
SU1684223A1 |
| Механическая лестница | 1985 |
|
SU1341141A1 |
| Механическая лестница | 1987 |
|
SU1495258A2 |
| ЭКСЦЕНТРИКОВЫЙ ВАЛ | 2010 |
|
RU2432505C1 |
| Механическая лестница | 1984 |
|
SU1248928A1 |
| Механическая лестница | 1984 |
|
SU1377237A2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2037631C1 |
| Установка для сортировки | 1978 |
|
SU776595A1 |
Изобретение относится к машиностроению и касается создания передачи для преобразования движения с помощью кривошипов и эксцентриков. Шатун имеет диск-эксцентрик с круглым отверстием, посредством которого диск-эксцентрик насажен на цилиндрический вал и жестко закреплен на нем. Диск-эксцентрик средствами качения связан со звеном шатуна. Звено шатуна связано с исполнительным звеном, имеющим возможность возвратно-поступательного перемещения. Центр отверстия диска-эксцентрика смещен от центра этого диска на расстояние радиуса кривошипа. Радиус диска-эксцентрика больше суммы радиуса кривошипа и радиуса вала. Ролики размещены на поверхности наружного диаметра диска-эксцентрика и охвачены обоймами, кольцевым корпусом и силовыми стенками, составляющими звено шатуна. Эти стенки выполнены с зауженными концами с отверстиями. В эти отверстия вставлена общая ось шарнирного соединения звена шатуна с исполнительным звеном. Диск-эксцентрик и цилиндрический вал выполнены с возможностью вращения вокруг одной общей оси, проходящей через центр эксцентриситетного отверстия диска-эксцентрика и вдоль оси цилиндрического вала. Технический результат реализации изобретения заключается в снижении стоимости изготовления эксцентрикового шатуна и в повышении его эксплуатационных качеств. 9 ил.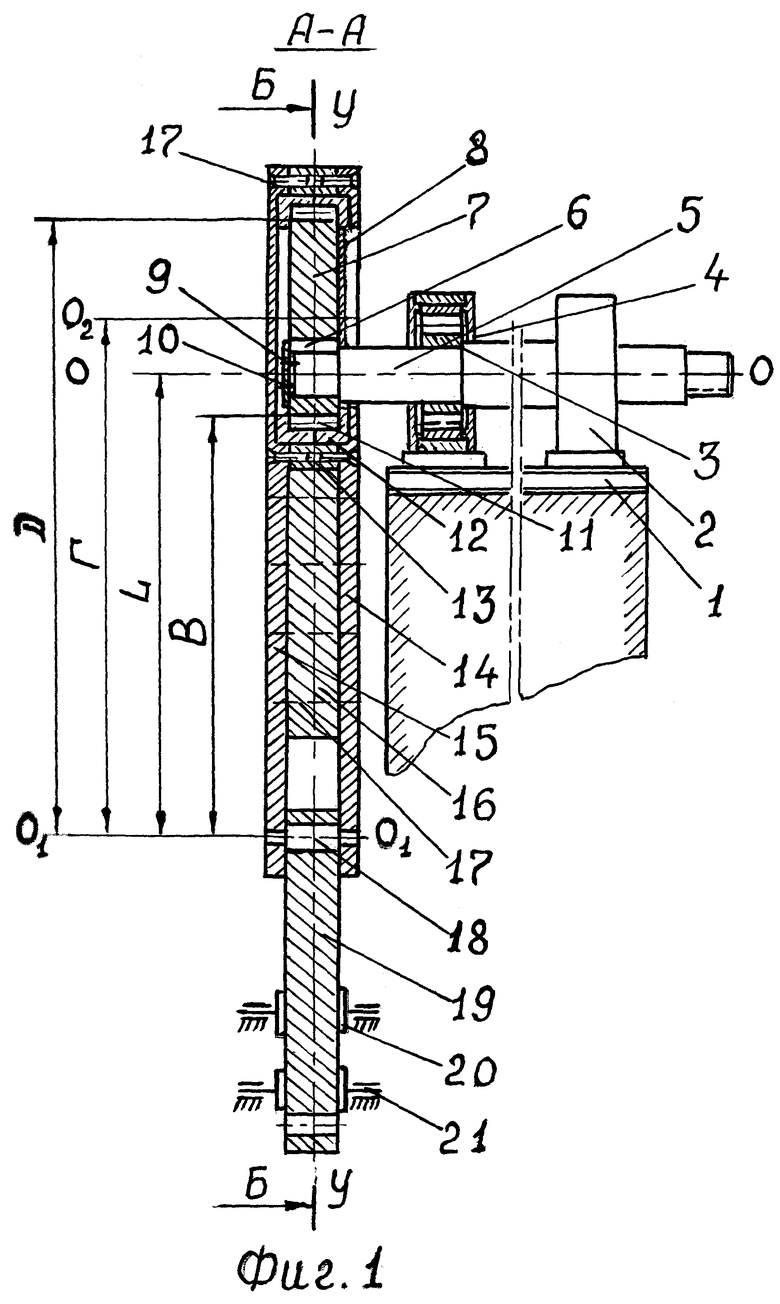
Эксцентриковый шатун, содержащий диск-эксцентрик с круглым отверстием, посредством которого диск-эксцентрик насажен на цилиндрический вал и жестко закреплен на нем, при этом диск-эксцентрик связан средствами качения со звеном шатуна, связанным с исполнительным звеном, зафиксированным от поперечных перемещений и имеющим возможность линейного возвратно-поступательного перемещения, отличающийся тем, что центр отверстия диска-эксцентрика смещен от центра этого диска на расстояние радиуса кривошипа, при этом радиус диска-эксцентрика больше суммы радиуса кривошипа и радиуса вала, средства качения, например ролики, размещены на поверхности наружного диаметра диска-эксцентрика и охвачены обоймами, кольцевым корпусом и силовыми стенками, составляющими звено шатуна, причем эти стенки выполнены с зауженными концами с отверстиями, в которые вставлена общая ось шарнирного соединения звена шатуна с исполнительным звеном, при этом диск-эксцентрик и цилиндрический вал выполнены с возможностью вращения вокруг одной общей оси, проходящей через центр эксцентриситетного отверстия диска-эксцентрика и вдоль оси цилиндрического вала.
| Электромеханическая игра | 1988 |
|
SU1517970A1 |
| Эксцентриковый механизм | 1982 |
|
SU1057722A1 |
| Способ получения эритрена | 1923 |
|
SU2316A1 |
| КУЛАЧКОВЫЙ МЕХАНИЗМ | 1992 |
|
RU2067233C1 |
| Эксцентриковый механизм | 1985 |
|
SU1237833A2 |
| Синусный механизм | 1983 |
|
SU1208380A1 |
| GB 1460986 А, 06.01.1977 | |||
| DЕ 4445131 А1, 27.06.1996 | |||
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ НА ОБЪЕКТЫ ЖИВОЙ И НЕЖИВОЙ ПРИРОДЫ | 1999 |
|
RU2160613C2 |
| DE 1907349 А, 28.01.1978. | |||

