(21)4098661/25-28
(22)13.05.86
(46) 30.01.88. Бгол. № 4
() Курганский машиностроительный
институт
(72) Г.Ю.Волков и Н.Н.Крохмаль
(53)621.574-86(088.8)
(56)Авторское свидетельство СССР № 314048, кл. F 16 Н 21/16, 1969.
(54)ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ
(57)Изобретение относится к машиностроению, а именно к преобразователям движения. Цель изобретения - расширение кинематических и динамических возможностей путем увеличения
хода ведомого звена и его тяговых способностей. Обеспечение периодического одновременного взаимодействия тел качения опорных подшипников 5 и эксцентрического подшипника с взаимодействующей с ведущим валом одной внутренней обоймой, выполненной в виде по крайней мере одного слоя роликов 7, позволяет при вращении ведущего вала всем телам качения механизма сохранять неизменным их положение относительно друг друга, т.е. выполнять им функции водила, а механизму, следовательно, быть планетарным, что и способствует достижению поставленной цели. 4 ил.
|
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ЭКСЦЕНТРИКОВАЯ ШАРИКОВАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2007 |
|
RU2341710C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 1996 |
|
RU2124661C1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ИЛИ КОЛЕБАТЕЛЬНОЕ | 2007 |
|
RU2352839C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |

(Л
00
о со сд
Фиг.1
1 1
Изобретение относится к машиностроению, а именно к механизмам, преобраз тощим вращательное движение в возвратно-поступательное, и может быть использовано в поршневых машинах станках, автоматах, испытательных стендах.
Целью изобретения является повьше ние кинематических и динамических возможностей путем увеличения хода ведомого звена и его тяговых способностей.
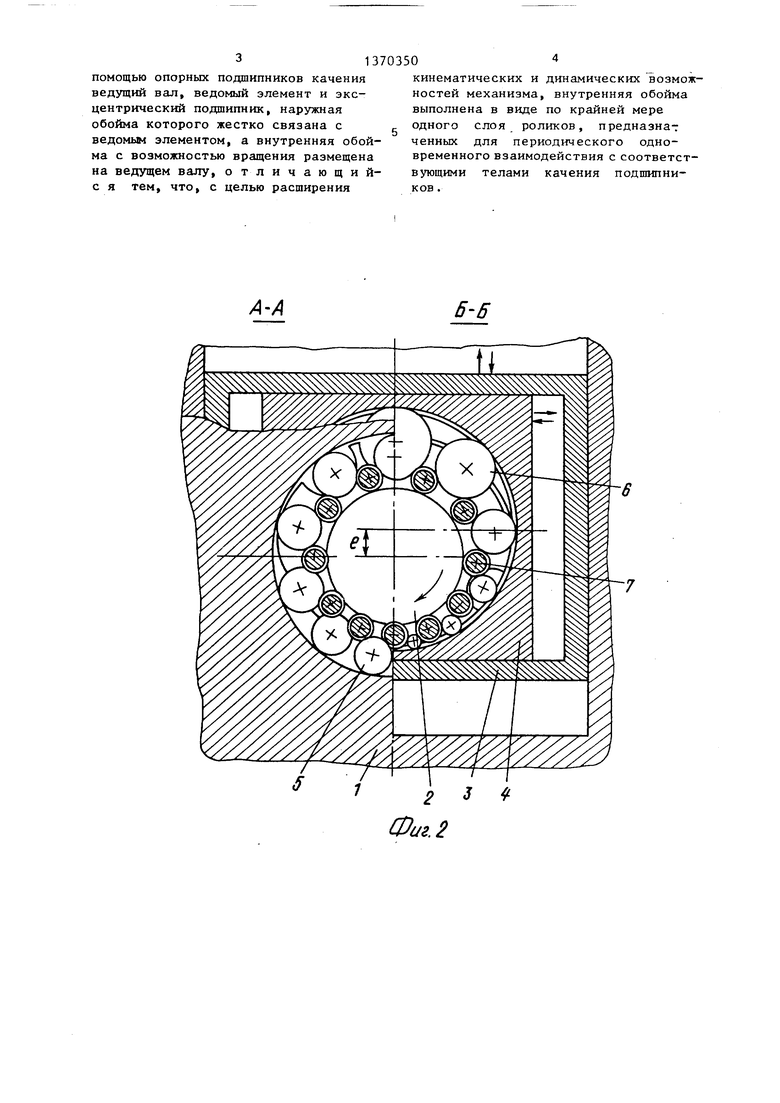
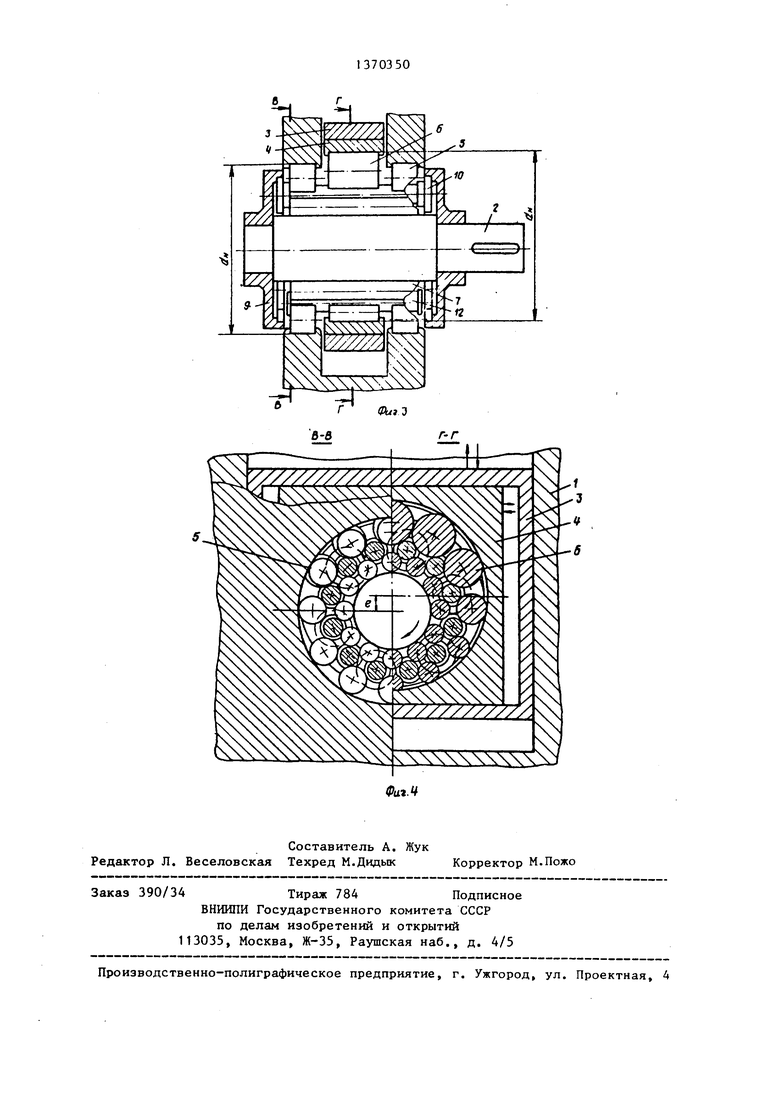
На фиг. 1 представлен механизм с однослойной внутренней обоймой из роликов, осевой разрез; на фиг. 2 - разрезы А-Л и Б-В на фиг. 1; на фиг. 3 - механизм с многослойной внутренней обоймой из роликов, осевой разрез} на фиг, 4 - разрезы В-В и Г-Г на фиг. 3.
Механизм (фиг. 1 и 2) содержит корпус 1, ведущий вал 2, поступатель но движущееся относительно корпуса исполнительное звено 3 и ведомое зве но 4. Ведущий вал 2 установлен в корпусе на двух опорных подшипниках 5. Ведомое звено 4 связано с валом 2 посредством эксцентрического подшипника 6. Внутренняя обойма выполнена в виде слоя роликов 7. На торцах роликов 7 выполнены цилиндрические выступы 8. Крышки 9, неподвижно закрепленные на корпусе механизма имеют проточку, цилиндрическая рабочая поверхность которой концентрична оси ведущего вала и предназначена для взаимодействия с выступами на торцах роликов 7. Диаметры наружных dц обойм опорных и эксцентрикового подшипников одинаковы. Для предотвращения осевого перемещения тел качения механизма вдоль ведущего вала 2 на роликах 7 можно, напр.чмер, выполнить кольцевые упоры 10, а на ведущем валу 2 - кольцевую проточку 11 для размещения в ней упоров 10 роликов 7.
На фиг. 3 и 4 представлен эксцентриковый механизм, внутренняя обойма которого выполнена в виде слоя роликов 7 и концентричного ему слоя роликов 12. При этом крьш1ки 9 закреп- лены на ведущем валу 2, а кольцевые упоры 10 выполнены на роликах 12 второго слоя.
Механизм работает следующим образом.
Вращение от ведущего вала 2 за счет сил трения, появляющихся при
703502
нагружении подшипников радиальной нагрузки, передается телам качения как всех подшипников, так и внутрен- g ней обоймы, которые вращаются вокруг своих осей и все вместе вокруг оси ведущего вала. При этом положение осей тел качения друг относительно друга остается неизменным, т.е. тела 10 качения выполняют функцию водила. Количество оборотов этого мнимого водила равно числу двойных ходов исполнительного звена 3.
Передаточное отношение данного 1р механизма как планетарной передачи определяется по формуле
и 1 - (-1)
Ei
25
30
35
40
где dj и d J, - диаметры дорожек качения внутренней и наружной обойм; k - число слоев роликов в
обойме.
Если число слоев роликов четное, например k 2, то передаточное отношение будет положительным и по абсолютной величине большим 2 (U 2), т.е. механизм понижает частоту движений исполнительного звена 3 по отношению к частоте вращения ведущего вала 2.
В случае нечетного числа слоев роликов (k 1 или k 3) и при 2 передаточное отношение может изменяться в следующих пределах: - 1 и 0, т.е. механизм работает в режиме мультипликатора, а при нечетном k и 2 - в режиме редуктора, но с передаточным отношением и -1. Практически передаточное число механизма может изменяться в
45 пределах от U
I ДО и
т.е. частота двойных ходов исполнительного звена может быть как выше, так и ниже частоты вращения ведущего в ала 2.
В частности, механизм, представленный на фиг. 1 и 2, имеет передаточное отношение U - 0,75, а механизм, представленный на фиг. 3 и 4, - и 3,5.
Формула изобретения
Эксцентриковый механизм, содержаий стойку, установленный на ней с
помощью опорных подшипников качения ведущий вал, ведомый элемент и эксцентрический подшипник, наружная обойма которого жестко связана с ведомым элементом, а внутренняя обойма с возможностью вращения размещена на ведущем валу, отличающий- с я тем, что, с целью расширения
кинематических и динамических возможностей механизма, внутренняя обойма выполнена в виде по крайней мере одного слоя роликов, предназнат ченных для периодического одновременного взаимодействия с соответствующими телами качения подшипников .
