i 1
Изобретение относится к области из мкреиий параметров движения, предназначено для исследования движения жидких сред и может быть использовано для измерения вектора пульсаций и средней скорости турбулентного поток в одном объеме измерения, что обеспечивает принципиальную возможность вычисления пространственного масштаба турбулентности .и анизотропии при проведении гидрофизических исследований и изучении полей скорости водной среды морей, океанов и потоков в гидротехнических сооружениях.
Известно устройство для измерения пульсаций скорости потоков жидкости, содержащее постоянный магнит и электроды,, однако это устройство позволяет измерять только пульсационные характеристики потока ij.
Наиболее близким к изобретению по технической сущности является устройство для измерения параметров турбулентного потока жидкости,содержащее магнитную систему с чередующимися полюсами, выполненную в виде тела вращения с двумя зазорами в рабочей части, заполненными диэлектриком, на поверхности которого установлены четыре электрода, а измерительный блок содержит схемы сложения и вычитания, к которым подключены электроды.
течение .жидкости - это трехмерное турбулентное движение, характеризуемое величиной вектора пульсаций скорости, пространственным масштабом и средней скоростью переноса. Таким образом, для полной характеристики турбулентного потока необходимы определение величины вектора пульсаций скорости, одновремен- ное (в том же объеме) измерение средней скорости и вычисление пространственного масштаба.
Известные устройства не предназначены для одновременного измерения трех компонент вектора пульсаций и средней скорости турбулетног.о потока и, следовательно, не обеспечивают возможности вычисления пространственного масштаба и анизотропии турбулентного потока.
Цель изобретения - увеличение объема получаемой информации.
Цель достигается м что в устройстве, содержащем магнитную систему с чередующимися полюсами, выполненную в виде тела вращения с зазо-
9Г-1042
parvSH, -lanoxiHeHiiHMH диэлектриком, в которых установлены две пары электродов , размещенные в вершинах квадрата, центр Которого находится на
J. оси тела вращения, а также измерительный блок, включающий схему сложения и две схемы выиитания, на входы которых подключены пары противолежа- нтих электродов, зазоры выполнены во
HQ взаимно перпендикулярных диаметральных плоскостях, при этом в одном из них си;уп етрично относительно оси тела вращения установлена пара дополнительных электродов, а в измеритель55 блок дополнительно введены три дифференциальных усилителя и корреляционный измеритель средней скорости, .к входам двух дополнительных диффе- (ренпиальных усилителей подключены по
2Q рве пары пр отиволежаш 1х электродов, расположенных в вершинах квадрата, выходы этих усилителей подключены к схеме сложения, к входу третьего дополнительного дифференциального уси25 лителя подктшчены дополнительные элек троды, на выхода корреляционного измерителя средней скорости подключены выходы двух ди рференциальньгх усилителей, к входам которых подключены основная и дополнительная пары электродов, размещенных в общем зазоре.
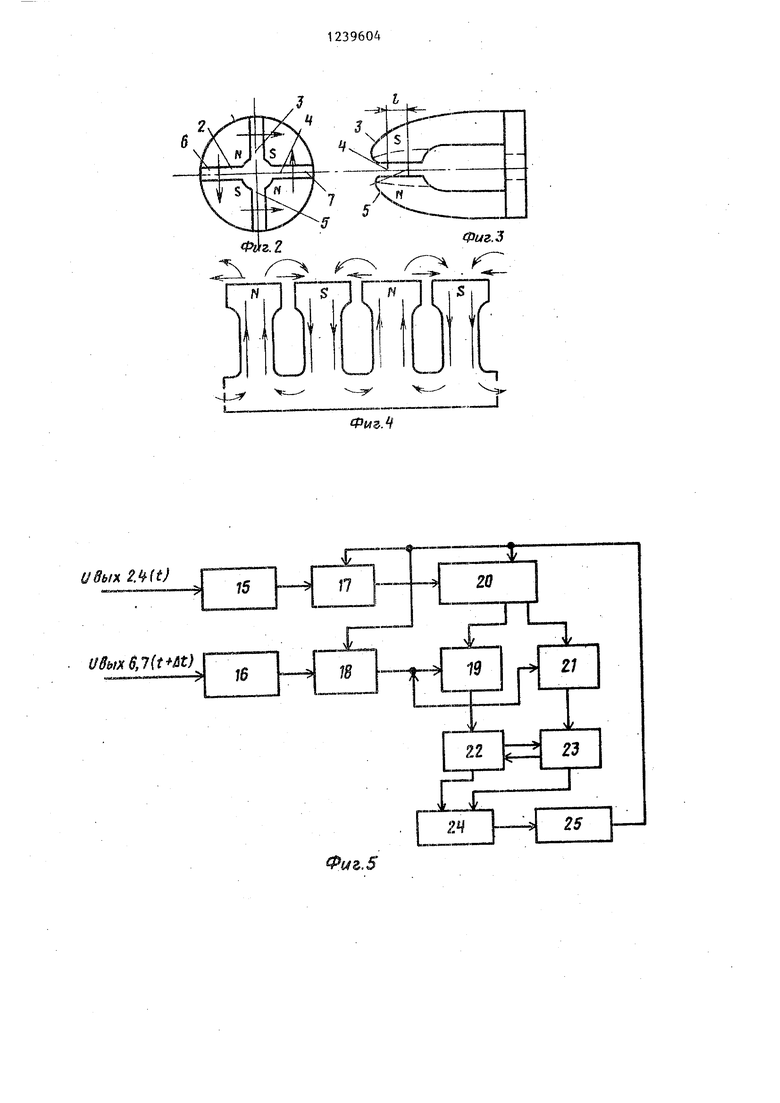
На фиг. 1 приведена блок-схема устройства с первичным измерительным преобразователем; на фиг. 2 - магнитная система с указанием точек расположения электродов., вид спереди; на фиг. 3 - то же, вид сбоку; на фиг.4- развернутая схема магнитной системы с пиниями направлений магнитных потоков в полюсах и зазорах: на фиг.5Af
блок-схема корреляционного измерителя средней скорости; на фиг. 6 - осциллограммы сигналов с выходов усилителей „
На корпусе 1 устройства размещены
- электроды 2-7, которые подключены к входам дифференциальных усилителей 8 - 12, связанным с сумматором 13 и корреляционным измерителем 14, средней, скорости. Измерительный блок так30
35
50
же содержит усилители-ограничители
15 и 16,, схемы 17-20 совпадения, стандартный последовательный регистр 21 ciiBifr a,, счетчики 22 и 23, схему управления частотой генератора 24 55 тактовых; импульсов 24 и генератор 25 тактовых импульсов.
Измерение компонент вектора пульсаций скорости производится в системе координат, две оси которой совпа- дают по направлениям с осями зазоров, а третья - с продольной осью преобразователя.
Устройство работает следующим об- с разом.
Примем, что вектор средней скорости потока (или направление движения первичного измерительного преобразователя) совпадает по направлению с JQ продольной осью К системы координат, связанной с преобразователем, тогда сумма величин потенциалов электродов преобразователя, расположенных в одной диаметральной плоскости, j пропорциональна величине продольной компоненты вектора пульсаций скорости Vjj , а разности величин потенциалов электродов в каждой из диаметральных плоскостей, совпадающих с осями «о ij и , выбранной системы координат, соответственно пропорциональны компонентам Vy и Vj .
Учитывая созданные направления полей в зазорах магнитной системы, ,(фиг. 2) и направления векторов скорости обтекания, которые направлены вдоль зазоров, мгновенные значения потенциалов на электродах 2 и 4, 3 и 5 всегда одинаковых знаков и на выходах дифференциальных усилителей 8 и 9, подкпюче14ных к этим электродам, сигналы пропорциональны разности потенциалов на входе, т.е. пропорцио25
30
нальны компонентам вектора Уц и V и являются выходными.
Для получения сигнала, пропорционального компоненте вектора пульсаций скорости V)(, применена схема двойного суммирования. Дифференциальные усилители 10 и 11 подключены соответственно к электродам 2 и 3, 4 и 5, которые установлены в зазорах с различными (по отношению к обтекающему патоку) направлениями магнитных полей, и мгновенные значения потенциалов на электродах 2 и 3, 4 и 5 будут различных знаков, следовательно, на выходах усилителей 10 и 11 сигналы пропорциональны суммам входных сигна лов (однако, эти суммы не пропорцио- нальны компоненте Vy, так как электроды, подключенные к входам усилителей, находятся в разных диаметральных плоскостях). Сигналы с усилителей 10 и 11 поступают на вход сумма- тора 13, на выходе которого получим сумму потенциалов четырех электродов, пропорциональную удвоенной величине компоненты V , что подтверждается простыми формулами. Известно, что
с
JQ j «о
5
0
5
. 0 5
1+ ,+ 5 KV,
где К - постоянный коэффициент, имеющий размерность кГ М/а, с (произведение магнитной индукции на расстояние) , и сумма четырех .электродов
/tfz+ 4/ +/4,+4-5/ 2KV.
Так как величина суммы от перестановки слагаемых не меняется, то
+/Ч 4+ Р5/ 2KV,.
Следовательно, сумма потенциалов четырех электродов является выходным сигналом, пропорциональным продольной компоненте вектора пульсаций скорости V,. .
Измерение средней скорости потока в том же объеме, в котором измеряются компоненты вектора пульсаций, производится с помощью дополнительных электродов 6 и 7, установленных на расстоянии. 1 от электрода 2 и 4 в тех же зазорах, показанных на фиг. 1 и 2. Сигналы на выходе дифференциального усилителя 12 (вход которого подключен к электродам 6 и 7) запаздывают от сигналов усилителя 8 (вход которого подключен к электродам 2 и 4) на время fit,.пропорциональное средней скорости потока V.. . На фиг. 4 .приведены осциллограммы сигналов с ВЫХОДОВ усилителей 8 и 12 и показано время запаздывания At. Это время определяется простой зависимостью
ut
Чр
тогда средняя скорость измеряемого потока определяется по формуле
V Р at
Расстояние между парами электродов 2 и 4, 6 и 7 отсчитывается по направлению оси У и его величина определяется следующим требованием. Величина задержки At не должна превышать (фиг. 4) половину периода Т максимальной частоты полосы пропус- :каийя усилителей 8 и 12. Тогда имеем
е 4t
ср mi Г)
с.
у ср.
пчп
2f
max
Измерение средней скорости по времени запаздашания случайных сигналов, полученных из различных точек движущейся среды, широко применяется в технике и, в частности, для измерения средней скорости проката металла„
Таким образом, для измерения средней скорости турбулентного потока жидкости с помощью первичного измерительного преобразователя магнито- гидродинамического типа обтекаемой формы при .установке в зазорах одной диаметральной плоскости по одному дополнительному .электроду может быть применена корреляционная схема измерения средней скорости потока.
Для измерения средней скорости потока в предлагаемом устройстве ис- пользуется корреляционный измеритель скорости с дискретным полярным коррелятором, в котором в качеств 1 блока переменной задержки применен регистр сдвига с переменной частотой тактовых (передвигающих) импульсов.
Сущность работы такого измерителя средней скорости заключается в автоматическом слежении за перемещением максимума функции взаимной корреляции двух- сигналов, полученных из разных точек движущейся среды, что соответствует измерению времени задержки между сигналами с выходов усилителей 8 и 1 2.
Рассмотрим последовательность про хоткдения сигналов в блок-схеме и выработку выходного сигнала, пропорционального средней скорости потока. Сигналы с выходов дифферендаальных усилителей 8- и 12 поступают на усилители-ограничители 15 и 16, где преоб- разуются (клиппируются) в последовательности прямоугольньк импульсов. .Затем поступают на схемы 17 и 18 совпадений, на вторые входы которых поступают короткие импульсы с генератора 25 тактовых импульсов. На выходах схем совпадения импульсы будут только в те моменты времени, когда последовательности прямоугольных импульсов усилителей 8 и 1 2 будут иметь положительные значения. И1-1пульсы со схемы 17 совпадения поступают на .стандартный последовательный регистр 19 сдвига, который вьтолняет функцию блока переменной задержки. Регистр ;сдвига имеет два выхода, с которых , импульсы поступают на две следующие схемы 20 и 21 совпадения, на вторые
5
0
входы этих схем совпадения поступают импульсы канала усилителя 12, сдвинутые по времени на величину дС. В схемах 20 и 21 совпадения (осуществляю- :щих функцию перемножения) фактически производится оценка (сравнение) величины задержки импульсов канала усилителя 8 в регистре сдвига t p с величиной задержки ut, пропорциональной средней скорости потока. Разница в задержках с учетом знака (больше или меньше) определяется счетчиками 22 и 23, Bbixopib которых подключены к схеме 24 управления частотой генератора 25 тактовых имггульсов.
Генератор тактовых импульсов по цепи обратной связи управляет величиной задержки в регистре сдвига. Управление производится таким образом, чтобы разница в задержках была равной нулю и это состояние автоматичес- ки по;здерживается при изменении, т.е. средней скорости потока. При автоматическом слежении выполняется условие
t
At NT,
р,с откуда следует
9
fp
NT
KF
гй
ги
ru
Tf
где К - число ячеек регистра сдвигаj Т,,- период частоты генератора тактовых импульсов; частота генератора тактовых импульсов;
К - постоянный коэффициент пропорциональности, равный и соответственно имеющий размерность длины, м. В результате средняя скорость потока в принятой схеме линейно опреде лается частотой генератора тактовых импульсов. Постоянный коэффициент К может быть вычислен по конструктивным параметрам.
Таким образом, применение в устройстве магнитной системы с четырьмя зазорами с принятым направлением магнитных полей и использование схемы двойного сум шрования обеспечивает .независимое измерение трех компонент вектора пульсаций скорости в выбранной системе координат, а установка дополнительных электцрдов с корреля- )дионным измерителем скорости обеспечивает одновременное измерение средней скорости потока в том же объеме измерения.
Независимость измерения трех компонент вектора пульсации скорости в выбранной системе координат обусловлена ее симметрией относительно зазоров. Отклонение вектора скорости относительно оси V в силу симметрии и совпадения осей с направлением зазоров вызывает изменение в разности потенциалов электродов, расположенных только по оси V , а отклонения относительно оси 2 повлияют только на разность потенциалов злект
родов оси Z , что равносильно появлению соответствующих компонент вектора пульсаций скорости.
Предлагаемое устройство позволяет путем изменения магнитной системы, добавления электронных блоков, установки дополнительных электродов и введения корреляционного измерителя скорости расширить его функциональные возможности для измерения параметров турбулентного потока жидкости измерять среднюю скорость и обеспечивать возможность вычисления простран- ствен«ых масштабов и анизотропии.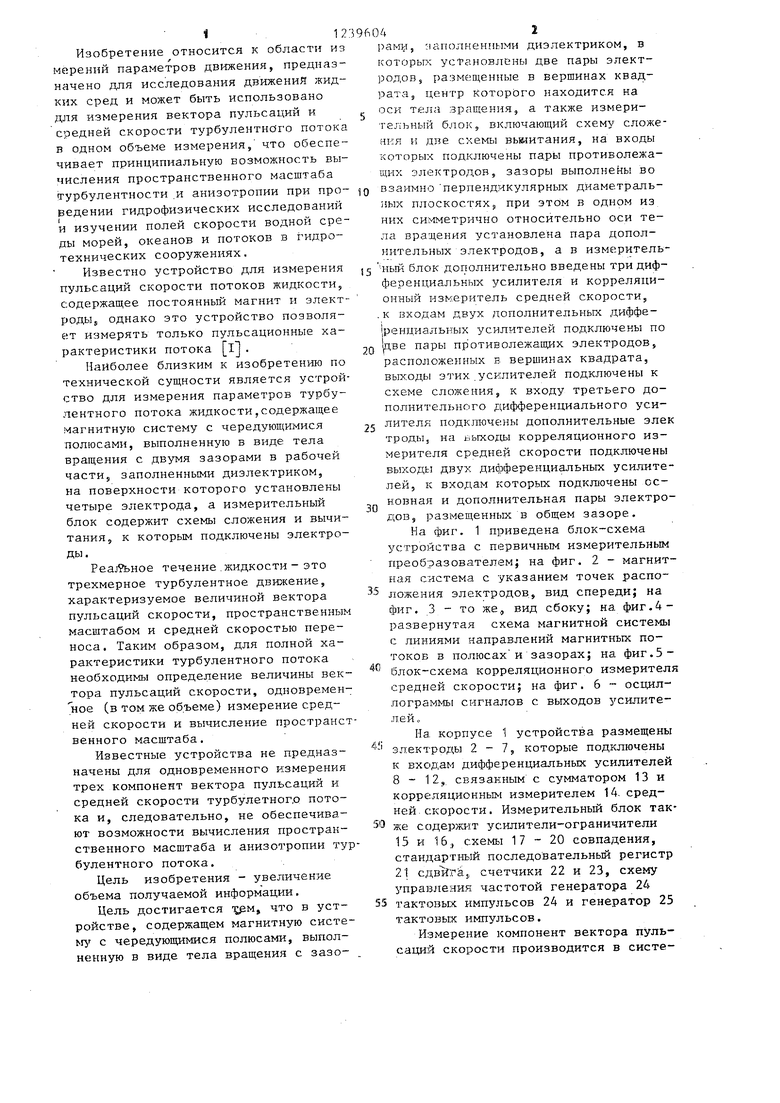



| название | год | авторы | номер документа |
|---|---|---|---|
| КОРРЕЛЯЦИОННЫЙ РАСХОДОМЕР | 1991 |
|
RU2010167C1 |
| Электромагнитный измеритель гидродинамических характеристик потока жидкости | 1980 |
|
SU898328A1 |
| Корреляционный измеритель скорости проскальзывания | 1983 |
|
SU1083119A1 |
| Магнитогидродинамический способ измерения неоднородностей морских течений и устройство для его реализации | 1977 |
|
SU741218A1 |
| Корреляционный измеритель скорости | 1981 |
|
SU1016743A2 |
| Электромагнитный первичный измерительный преобразователь скорости | 1979 |
|
SU960630A1 |
| Корреляционный расходомер | 1981 |
|
SU1041872A1 |
| Устройство для измерения пути и линейной скорости объекта | 1983 |
|
SU1108362A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТУРБУЛЕНТНОГО ПОТОКА ЖИДКОСТИ (ВАРИАНТЫ) | 2014 |
|
RU2561304C1 |
| Двухкомпонентный измеритель скорости воздушных потоков | 1991 |
|
SU1797710A3 |


VCP
Фиг.1
/::2 о тгтпг- -пг
.h
I
Фиъ.Ц
ивыу. 2Mt)
U8bt}($,)
Фi4г.5
Редак рор Л. Гратилло
Составитель В. Назарова
Техред О.Сопке , Корректор М. Демчик
Заказ 3390/44Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Ф14г.6 .
| Устройство для измерения пульсаций скорости топока жидкости | 1978 |
|
SU679878A1 |
| Устройство для измерения пульсаций скорости потока жидкости | 1979 |
|
SU775699A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
