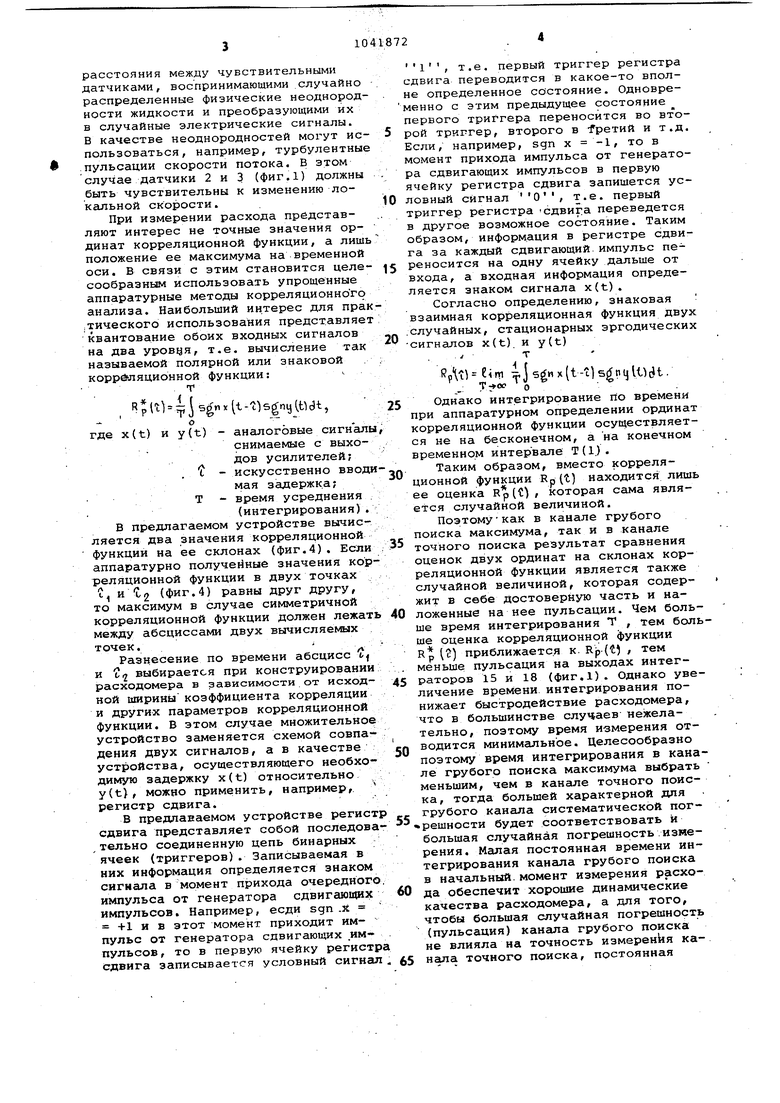
Изобретение относится к приборостррекию и предназначено для измере ния расхода жидких и газообразных сред. Известны корреляционные расходемеры, содержание два преобразовател скорости, -расположенные на некоторо расстоянии другот друга, и корреля ционную измерительную схему для измерения фазового сдвига между двумя непрерывными случайными сигналами и временного сдвига двух релейных функций f) . Наиболее близким к предлагаемому является корреляционный расходомер, содержащий участок трубопровода,дат чики случайного сигнала, усилители сигналов, индикатор, каналы грубого и точного поиска максимума, каждый из которых состоит из регистра сдви га, схем совпадения, .вычитающего устройства, интегратора и управляемого генератора сдвигающих импульсов з , Однако известные расходомеры обеспечивают измерение расхода в узком.диапазоне измерения. Целью изобретения является расширение диапазона и повышение точно ти измерения.. Поставленная цель достигается тем, что в корреляционный расходоме содержащий измерительный участок тр бопровода, последоватсельно расположенные на нем два датчика случайных сигналов, подключенные соответствен но к усилителям сигналов, пгервый из усилителей соединен с каналом грубо го поиска максимума, второй - с вхо дами схем совпадения канала точного поиска максимума, при этом каждый из каналов состоит из регистра сдви га, выходы которого подсоединены к входам двух схем совпадения, выходы схем совпадения подключены к входам схемы вычитания, выход которой соединен через интегратор с входом управляемого генератора сдвигающих импульсов, один из выходов которого подключен к входу регистра сдвига, второй выход генератора сдвигающих импульсов канала грубого поиска максимума подключен к входу генератора сдвигаю1цих импульсов канала точного поиска максимума, второй выход которого подключен к индикатору, введены два фильтра низких частот, схема управления и сумматор, при iiTOM выход первого усилителя подключен к входу канала грубого поиска максимума через первый фильтр низких частот, вход второго фильтра низких частот подключен к выходу второго уАилителя, выход второго фильтра низких частот - к входам двум схем совпадения канала грубого поиска максимума, выходы двух схем . совпадения канала точного поиска максимума подключены к входам схемы управления постоянной времени, выход схемы управления подключен к интегратору канала грубого поиска мАксимума, выходы каналов грубого и точного поиска максимума подключены к входам сумматора, выход которого соединен с входом генератора сдвиггиощих импульсов канала точного поиска максимума. На фиг.1 показана блок-схема кор- . рефляционного расходомера; на фиг.2 график взаимной корреляционной функции сигналов, снимаемых непосредственно с датчиков; на фиг.З - то же, прошедших фильтры нижних частот; на фиг.4 поясняется работа схемы управления. Корреляционный расходомер содер- ° жит участок трубопровода 1, датчики 2 и 3 случайного сигнала, усилители 4 и 5 сигналов. Усилитель 4 через фильтр 6 низких частот подсоединен к входу канала г,рубого поиска максимума, а именно к входу регистра 7 сдвига, и, кроме того, соединен непосредственно с регистром 8 сдвига канала точного поиска максимума. .Выходы регистра 7 сдвига канала грубого поиска максимума соединены с входами схем 9 и 10 совпадения того же канала. : Выход усилителя 5 соединен с входами схем 11 и 12 совпадения канала точного поиска максимума и, кроме того, через фильтр 13 низких частот усилител ь 5 соединен с другими входами схем 9 и 10 совпадения канала грубого поиска максимума, выходы которых подсоединеньа к вычитающему устройству 14, выход которого подсоединен к входу интегратора 15. Выходы схем 11 и 12 совпадения канала точного поиска максимума через схему 16 управления подключены к одному из входов интегратора Г5 канала грубого поиска максимума,кроме того, выходы указанных схем под- соединены также к входу вычитающего устройства 17 канала точного поиска максимума, выход которого соединен с входом интегратора 18. Выход интегратора 15 канала гру. бого поиска максимума подсоединен к входу генератора 19 сдвигающих импульсов. Выходы интеграторов,15 и 18 подсоединены к сумматору 20, выход которого соединен с входом генератора 21 сдвигающих импульсов, а выход генератора 21 подсоединен к индикатору 22. Генераторы 19 и 21 с помощью обратных связей соединены соответственно с регистрс1ми 7 и 8 сдвц,га. Работа корреляционных расходомеров основана.на .аппаратурном определении времени прохождения потоком расстояния между чувствительными датчиками, воспринимающими случайно распределенные физические неоднород ности жидкости и преобразующими их в случайные электрические сигналы. В качестве неоднородностей могут ис пользоваться, например, турбулентные пульсации скорости потока, В этом случае датчики 2 и 3 (фиг.1) должны быть чувствительны к изменению локёшьной скорости. При измерении расхода представляют интерес не точные значения ординат корреляционной функции, а лишь положение ее максимума на временной оси, В связи с этим становится целесообразным использовать упрощенные аппаратурные методы корреляционного анализа. Наибольший интерес для прак .тического использования представляет квантование обоих входных сигналов на два уровня, т,е, вычисление так называемой полярной или знаковой . корреляционной функции: Т l ; Jsgnx t-Jlsgni.j(,tl6t, где x(t) и y(t) - аналоговые сигналы снимаемые с выходов усилителей искусственно вводи мая задержка; время усреднения . (интегрирования), В предлагаемом устройстве вычисляется два значения корреляционной функции на ее склонах (фиг,4), Если аппаратурно полученные значения кор реляционной функции в двух точках , и Л 2 (фиг,4) равны друг другу, то максимум в случае симметричной корреляционной функции должен лежать между абсциссами двух вычисляемых точек,Разнесение по времени абсцисс и t выбирается при конструировании расходомера в зависимости от исходной ширины коэффициента корреляции и других параметров корреляционной функции, В этом случае множительное устройство заменяется схемой совпадения двух сигналов, а в качестве устройства, осуществляющего необходимую задержку x(t) относительно y(t, можно применить, например, регистр сдвига, В предлаваемом устройстве регистр сдвига представляет собой последова ,тельно соединенную цепь бинарных ячеек (триггеров), Записываемая в них информация определяется знаком сигнала в момент прихода очередного импульса от генератора сдвигающих импульсов. Например, есди sgn .х +1 и в этот момент приходит им- пульс от генератора сдвигающих импульсов, то в первую ячейку регистр сдвига записывается условный сигнал т.е. первый триггер регистра сдвига переводится в какое-то вполне определенное состояние. Одновременно с этим предыдущее состояние первого триггера переносится во второй триггер, второго в fpeтий и т.д. Если, например, sgn х -1, то в момент прихода импульса от генератора сдвигающих импульсов в первую ячейку регистра сдвига запишется условный сигнал О, т.е. первый триггер регистра -сдвига переведется в другое возможное состояние, Таким образом, информация в регистре сдвига за каждый сдвигающий импульс переносится на одну ячейку дальше от входа, а входная информация определяется знаком сигнала x(t). Согласно определению, знаковая взаимная корреляционная функция двух .случайных, стационарных эргодических сигналов x(t). и y(t) . V Т egnx(t-t)s tnjlt t. Однако интегрирование по времени при аппаратурном определении ординат корреляционной функции осуществляется не на бесконечном, а на конечном временном интервале Т(1.), Таким образом, вместо корреляционной функции Rp(t) находится лишь ее оценка R () , которая сама является случайной величиной. Поз тому как в канале грубого поиска максимума, так и в канале точного поиска результат сравнения оценок двух ординат на склонах корреляционной функции является также случайной величиной, которая содержит в себе достоверную часть и наложенные на нее пульсации. Чем больше время интегрирования Т , тем больше оценка корреляционной функции RP с) приближается к. Rp-( / тем меньше пульсация на выходах интеграторов 15 и 18 (фиг.1), Однако увеличение времени, интегрирования понижает быстродействие расходомера, что в большинстве случаев нежелательно, поэтому время измерения отводится минимальное. Целесообразно поэтому время интегрирования в канале грубого поиска максимума выбрать меньшим, чем в канаше точного поиска, тогда большей характерной для грубого канала систематической погрешности будет соответствовать и большая случайная погрешность.измерения. Малая постоянная времени интегрирования канала грубого поиска в начальный, момент измерения расхода обеспечит хорошие динамические качества расходомера, а для того, чтобы большая случайная погрешность (пульсация) канала грубого поиска не влияла на точность измерен11я канаша точного поиска, постоянная времени интегратора 15 сделана пере менной. Положение максимума функции на временной оси определяет расход потока. Очевидно, чем более узкий будет пик корреляционной функции, тем точнее может быть определена коорди ната максимума, тем может быть выше точность измерения расхода. Однако узкий пик взаимной корреляционной функции делает затруднительным и да же невозможным начальный поиск максимума в широком диапазону измерения расхода автоматической дифферен циальной схемой. . Для обеспечения нормальной работ расходомера предлагается схема грубого поиска максимума на которую сигнал с выходов усилителей подаетс .через фильтры низких частот. Сформированная фильтрами б и 13 низких взаимная корреляционная функция имеет достаточную ширину (фиг.З) для отыскания схемой ее максимума во всем измеряемом .диапазоне. Сигнал рассогласования с выхода интегратора 15 канала грубого поиск максимума подается на сукянатор 20, в котором он суммируется ;. сигналом рассогласования канала точного поиска максимума (фиг.1). Суммарный сигнал управляет генератором 21 сдвигающих импульсов канала точного поиска Максимума, обеспечивая высокую точность поиска максимума при . широком диапазоне измерения. Момент переключения постоянной Бремени интегратора 15 канала грубого поиска максимума задается схемой 16 управления, которая представляет собой сумматор, суммирующий сигналы с выходов схем 11 и 12 совпадения, интегратор, интегрирующий эту сумму и пороговое устройство, которое подает сигнал на переключение постоянной .времени интегратора 15. Работа схемы управления поясняется на фиг.4. В начальный момент времени измерения расхода может установиться произвольное значение частоты генератора сдвигающих импульсов канала точного поиска максимума. Поэтому сумма ординат взаимной .корреляционной функции в точках t я может .быть равной нулю. Пороговое устройство схемы управления не подает сигнала на переключение постоянной времени и грубый канал производит поиск максимума с малой постоянной времени, т.е. с наибольшей скоростью и, соответственно, с большой случайной погрешностью с выхода сумматора 20на вход управляемого генератора 21сдвигающих импульсов. Таким образом, генератор 21 сдвигающих импульсов канала точного поиска управляется суммой сигналов рассогласования обоих каналов, благодаря чему необходимый для управления сигнал рассогласования точного канала будет всегда меньше их суммы. Так как сигнал рассогласования - это «шибка следящей системы поиска максимума, то его уменьшение приводит к уменьшению систематической, погрешности измерения расхода. Изменяющееся напряжение с выхода интегратора изменяет значение частоты генератора сдвигающих импульсов, смещая тем- самым взаимную корреляционную .функцию, по временной оси (фиг.З) Сумма ординат корреляционной функции в точках , и станет отличной от нуля и; когда она превысит какой-то наперед заданный уровень, схема управления подаст сигнал на переключение постоянной времени интегратора 15. С этого момента слежение осуществляется и каналом точного поиска максимума, а с канала грубого поиска по-прежнему снимается сигнал, но уже сглаженный большей постоянной временили не вносящий дестабильности в работу канала Т9Чного поиска. Таким образом, в предлагаемом устройстве суммирование сигналов рассогласования в точном канале уменьgiaeT систематическую погрешность измерения расхода, а переключение постоянной времени интегрирования канала грубого пЬиска максимума уменьшает случайную погрешность расходомера, что приводит к повышению точности измерения расхода.
с/
:.J

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1980 |
|
SU1840270A1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 1981 |
|
SU1840149A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840118A1 |
| КОРРЕЛЯЦИОННЫЙ РАСХОДОМЕР | 1991 |
|
RU2010167C1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА | 1980 |
|
SU1840288A1 |
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 1982 |
|
SU1840503A1 |
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 1981 |
|
SU1840035A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1976 |
|
SU1840434A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМИ СИГНАЛАМИ | 1981 |
|
SU1840501A1 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |

КОРРЕЛЯЦИОННЫЙ РАСХОДОМЕР, содержащий измерительный участок трубопровода, последовательно распо-. .ложенные на нем два датчика случайных сигналов, подключенные соответственно к усилителям сигналов, первый на усилителей соединен с каналом. грубого поиска максимума, второй с входами схем совпадения канала точного поиска максимума, при этом каждый из кангшов состоит из регистра ; сдвига, выходи которого подсоединены к входам двух схем совпадения, .выходы схем совпадения подключены к входгш схемы вычитания, выход которой соединен через интегратор с дом управляемого генератора сдвигаю щих импульсов,один из выходов котррого подключен к входу регистра сдвига, второй выход генератора сдвигающих импульсов канала грубого поиска максимума подключен к ВХОДУ генератора сдвигающих импульсов канала точного поиска максимума, второй выход которого подключен к ин. дикатору, отличающийся тем, что, с целью расширения диапазона и повышения точности измерения, в устройство введены два фиЛьтра низких частот, схема управления и сумматор, при этом выход первого усилителя подключен к входу канала грубого поиска максимума через первый фильтр низких частот, вход вто(Л рого фильтра низких частот подключен к выходу второго усилителя, выход второго фильтра низких частот - к входам двух схем совпадения канала грубого поиска максимума, выходы двух схем coвпaдeн я канала точного поиска максимума подключены к входам э схемы управления постоянней времени, выход схемы управления подключен к 4: интегратору канала грубого, поиска максимума, выходы каналов грубого и точного поиска максимума подключеэо 1 ны к входам сумматора, выход которого соединен с входом генератора сдвигающих импульсов канала точного го (Поиска максимума.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ильинский В.М | |||
| Бескочтактное измерение расходов | |||
| М., Энергия, 1970, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| A.M | |||
| Hayes and G | |||
| Musgrave | |||
| Correlation design for fPow measure-, .ment | |||
| - The Radio and ECectronic EngiAeer | |||
| VoZ | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Способ получения бензонафтола | 1920 |
|
SU363A1 |
