1
Изобретение относится к области измерения неоднородностей морских течений, преимущественно к технике океанографических измерений, и может быть использовано для исследова-, ния короткопериодичкой естественной турбулентности Океана.
Известен ряд способов исследования турбулентных течений, среди которых для капельных жидкостей наиболее пригодны методы, основанные на визуализации течения, метод термоанемометра и метод, основанный на принципе электромагнитной индукции 1 и. .2 .
Первые из них малопригодны для использования в открытом море и используются, в основном, при исследованиях в лабораторных каналах, трубопроводах и бассейнах. Кроме того, они вообще не позволяют регистрировать спектральные характеристики мелкомасштабной турбулентности.
Наиболее распространенным прибором для исследования турбулентности остается термоанемометр, устанавливаемый на подвижном носителе (корабль, гондола и т. п.), который
профилирует турбулентную область с постоянной скоростью 3.
однако дальнейшему распространению термоанемометрических методов препятствуют присущие им недостатки: нелинейная зависимость переноса тепла от скорости и температуры; сложность аппаратурного оформления; зависимость разрешающей способности
10 от постоянной времени нагретой пленки; чувствительность пленки к отложениям и ударам микрочастиц, из-за чего изменяются параметры пленки и требуется ее зачистка и новая тариров15ка и т. д.
Более привлекательны методы исследования неод нородностей турбулентных течений, основанные на принципе 2Q электромагнитной индукции, или магнитогидродинамические методы, свободные от недостатков, перечисленных выше 2 ,
25 Эти способы измерений и устройства с успехом используются .для определения средних относительных скоростей потока жидкости. Использование их для исследования турбулентной структуры пото3Q ка затруднительно и практически невозможно при натурных исследованиях в море.
Из известных магнитогидродинамических способов и устройств наиболее близким по технической сущности является магнитогидродинамический способ измерения неоднородностей среды, в котором измеряют электрическое пол создаваемое морскими течениями и скорость течений. Электрическое поле измеряют двумя электродами, расстояния между которыми последовательН9 увеличивают, а о величине неоднородностей судят по величине измеренного сигнала и размерам измерительно установки 4.
Однако, существующий .способ не может использоваться для регистрации неоднородностей турбулентных пульсаций скорости ввиду того, что он рассчитан на выделение стационарных неоднородностей. Дополнительно можно отметить недостатки, присущие аппаратурному оформлению. Это, прежде всего, низкая точность и .чувствительность для целого ряда исследовательских задач. Полоса пропускания измерительного канала устройств выбирается для всего интервала исследуеглых масштабов от минимального до максимального. Поэтому внешняя помеха и внутренние шумы канала интегрируются на всей широкой полосе, хотя полезный сигнал для каждого конкретного пересечения турбулентной области лежит в априорно неизвестном но более узком интервале частот. Применяемый последующий спектральный (корреляционный).анализ.занимает много времени и весьма трудоемок. Цель изобретения - разработка способа измерения неоднородностей морских течений,обладающего повышенной точностью и простотой измерений также устройства для его реализации
Поставленная цель достигается тем, что одновременно измеряют разность потенциалов в точках, расположенных на фиксированных расстояниях и ориентированных по двум направлениям, которые пересекаются под углом ± (54-135)к полному вектору магнитного поля Земли. Далее по скорости перемещения V точек наблюдения определяют масштабы турбулентнбсти, соответствующие каждой из частот С. Q , а по амплитуде напряжения судят о модуле вектора завихренности Si , ортогонального вектору напряженности магнитного пЬл)4 Земли . J(f
Л г-о
.u...(,
где сЛ константа координат пересечения данного потока;
ft - проекция вектора магнитной индукции на плоскость, перпендикулярную измерительной базе;
Со размер измерительной базы.
Другое отличие состоит в том, что для обеспечения равной предельной чувствительности и разрешающей способности для широкого интервала масштабов турбулентности от6(3,г1|п доЕц,„д , выбирают коэффициент увеличения размера измерительной базы к в пределах от 1,2 ,до 4 и устанавливают первую точку наблюдения на расстоянии Edi от нулевой, а последнюю - Р-ао ;, Все промежуточные точки наблюдения устанавливают на расстояниях 2 сг. в V раз больших, чем предыдущие .
Разности потенциалов измеряют в потосе частот от ,-; до fcfKli-K) Гц . Частотные искажения при этом исключают умножением измеряемого сигнала на|б1( .
Поставленная цель достигается . также тем, что устройство для измерения неоднородностей морских течений состоит из ряда измерительных каналов, каждый из которых включает последовательно соединенные усилител с автоматической регулировкой усиления (АРУ) , полосовой полуоктавный и корректирующий фильтры и регистратор В устройство включены также датчики магнитного поля Земли, ориентированные параллельно измерительным базам многоэлектродных датчиков. Для решения поставленной, задачи пары измерительных датчиков расположены симметрично диаметральной плоскости но-сителя по линиям, пересекающим ее в точке установки нулевого электрода под углом ±45-, причем, первая пара отстоит от нулевого электрода на
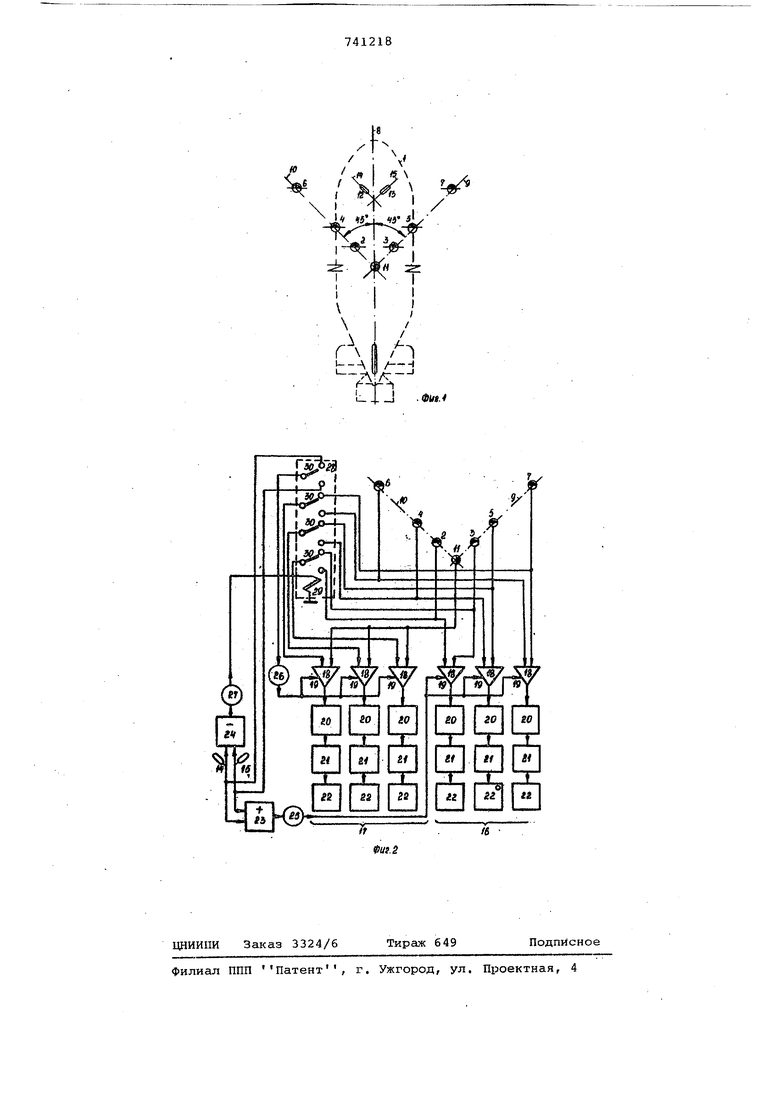
расстояние & о- -(-Xl) о mm , а все последующие - на расстояние вдвое большее, чем предыдущие. Полосовые фильтры характеризуются частотами H(va4A-)Rcri и ig -Ча-Сн , корректирующий фильтр имеет характеристику «in (Jt -f ) . Каналы разделены на два ряда - коммутируемый некоммтируемый. Сигнальные входы последнего подключены к симметричным парам измерительных датчиков, а входы АРУ этих каналов соединены параллельно и через формирователь управляющего напряжения и сумматор подключеньР к датчикам магнитной индукции.У коммтируемого ряда каналов одна из сигнальных лент соединена с нулевым злектродом,а вторая - через переключающий ключ к одной из входных клемм некоммутируемых каналов.Все управляющи входы АРУ этого ряда каналов также соединены параллельно и через второй формирователь управляющего напряжени и дополнительный переключающий ключ подключены к датчикам магнитной индукции . Все ключи KOivnviyTaTOpa имеют общую цепь управления,подключенную к выходу компаратора через третий формирователь управляющего напряжеНИИ, а входы компаратора подключены к датчикам магнитной индукции. На носителе может быть установле дополнительный датчик относительной скорости, который подключают к цепям управления регулируемых полосовых и корректирующих фильтров всех каналов. Таким образом, основой способа и устройства для его осуществления является регистрация электрической составляющей электромагнитного поля вмороженного в вихревую структу ру турбулентного потока. Причем, электромагнитное поле .индуцируется в турбулентном потоке не за счет магнитного поля искусственного маг,нита, а под действием однородного магнитного поля Земли. В развитом ту булентном потоке существуют простран ственно-временные области, практиче ки однородные, изотронные и стационарные. Турбулентность внутри таких областей имеет одинаковую структуру а ее статистические характеристики не зависят от направления.и времени Поэтому поле случайных скоростей изо ронной области сколь угодно точно (в статистическом смысле) представля ется конечной суммой некоррелированных волн различной длины (масштаба) со случайными амплитудами и фазами. Для каждой из этих пространственных гармоник, соответствующих потоку с постоянной периодичностью, можно найти решение уравнения Пуассона, о ределяющего потенциал индуцированно электрического поля: .8Л „iait2.JC2Л1, - -|;- -|lVco. гК -о -о -Q где В - модуль напряженности магнитно го поля Земли, ортогональный вектору завихренности турбулентного поля скоростей Я; 8о- масштаб турбулентности; Х,У,2: - текущие координаты. При- пересечении турбулентного потока датчиком с размером измерительной базыС.з-по определенной траектори со скоростью V ,для напряжения на электродах датчика на основании (1) будем иметь: , U-Bn.e.e,n3.co., 2 гдес - константа для заданной траектории пересечения турбулентной области, величина которой зависит от ориентации измерительной базы датчика относительно вектора В . Причем ) при ориентации 2 (J параллельно вектору 8 . Для устранения слепых пересечений измерительная база датчика должна ориентироваться под углом t (45 - 135)°к вектору В . При угле, равном 90°, значение cf, максиглально. Исключение слепых масштабов, при которых (ЛР(5/Во) о, ДОСТИгается использованием многоэлектродного датчика с различными Р(5 Из (2) следует, что частота наблюдаемого сигнала прямо пропорциональна скорости пересечения турбулентной области и обратно пропорциональна масштабу регистрируемой турбулентности: .(3) 2Jt ео Таким образом, по частоте регистрируемых сигналов определяется масштаб турбулентности ol (4) а при известном масштабе и амплитуде напряжения на каждой частоте можно судить о модуле вектора завихренности, ортогонального вектору магнитной индукции: и, Как уже отмечалось, для регистрации спектра завихренности используется датчик, с каждого из измерительных электродов которого сигнал подают на измерительный канал. Для сохра- нения предельной чувствительности и разрешающей способности желательно в каждом канале иметь одинаковый уровень шумов. Известно, что в области низких частот шумы электронных схем имеют распределение типа V , поэтому уровень-шума пропорционален отношению полосы пропускания к частоте сигнала, т. е, требование пос|Тоянства уровня шумов в каналах своТдится к требованию: Af-, c3nst (б) Для выполнения условия (6) необ- , ходимо соблюдать определенные соотношения между размерами измерительных баз многоэлектродного датчика. Пусть интервал интересую11Ц1х масштабов турбулентности заключен в пределах:, (7, Из (2) следует, что оптимальный размер базы датчика определяется из условия ein(jrgdonT/Po)- , откуда 1 (1-ат) сГопт 2. где ,1,2...(8) Требование (8) для интервала масштабов (7), можно выполнить при использовании датчика с периодически и плавно изменяющимися размерами базы. Однако, такая конструкция настолько сложна, что становится невозможным ее практическое использование в натурных условиях. Возможени другой путь. Если из-за рассогласования датчика допустить уменьшение амплитуды сигнала (2) на малую величину а , т. е. s n3|i- e,n{2., о датчик, близкий к оптимальному, удет содержать конечное числоизмеительных электродов. При сГ - 0,020,5 из (9) для угла рассогласования датчика и коэффициента увеличения размера измерительных баз соответственно следует: «ОД-j s -«При этом число измерительных электр дов (каналов) и размеры измерительных баз будут равны: En (Zoinax/.огпщ „ УЧ-Л о.. . (10 УЧ-Л max Comm о р . di K-i-А ошш .(+ii Задав v 3,2 или n 4 из (11) дл интервала (7), требуемые размеры измерительных баз будут: 6(f 237 с Чб -- 74 см,есГэ 23 см, 7,2 см Каждый из. каналов при этом будет предназначен для регистрации турбулентности с масштабами от .(Vv Ajed; Откуда в соответствии с (3) граничн полосы пропускания t .Х- , .t tA ±. Come., e aomin-, . Легко проверить, что (13) с учетом (12) отвечает условию (6). В рассматриваемом примере полосы прозрачности каждого канала при ско рости пересечения V Ю узлов будут равны: &f (0,5-1,6) Гц; . (1,6-5,1) Гц; д€ (5,1-16,5) Гц uf (16,5-53) Гц. Для удобства использования резул татов измерений желательно иметь коэффициент преобразования постоян ..для всех частот-масштабов. Это обес , печивается введением корректирующего множителя. На фиг. 1 схематически представл расположение многоэлектродного дат чика и датчиков магнитной индукции на носителе; на фиг. 2 - блок-схем устройства, осуществляющего способ регистрации спектра завихренности турбулентного течения. На носителе 1 установлен многоэлектродный датчик, пары измерител ных электродов которого 2 и 3, 4 и 6.и 7 расположены симметрично по о ношению к диаметральной плоскости по линиям 9 и 10, пересекающим эту плоскость под углом ±45 в точке ус тановки нулевого электрода 11. На носителе укреплены и датчики 12 и магнитной индукции, оси 14 и 15 чув ствительности которых параллельны линиям 10 и 9 соответственно. Регистрирующие каналы разделены на два ряда 16 и 17, в каждом из которых находится равное число кан лов, состоящих из усилителей 18 с входами 19 АРУ, полосовых фильтров .корректирующих фильтров 21 и регис торов 22. Кроме того, устройство со держит сумг-iaTOp 23 и компаратор 24 входы которых подключены к датчикам магнитной индукции, три формирователя управляюишх напряжений 25, 26 и 27, а также коммутатор 28 с цепью 29 управления и переключающими контактами. 30 . В зависимости от ориентации носителя по отношению к вектору магнитной индукции поля Земли, будет изменяться соотношение между его проекциями на направление измерительных баз датчика 9 и 10. Абсолютное значение этих проекций регистрируется датчиками 15 и 14 соответственно, подключенных ко входам сумматора 23 и компаратора 24. Сигнал на выходе сумматора будет пропорционален проекции вектора магнитной индукции поля Земли на ось носителя. Компаратор 24 определяет больший из сигналов с датчиков 14 и 15 и через формирователь 27 подает сигнал на цепь 29 управления коммутатора 28, который подключает входы коммутируемого ряда каналов 17 к измерительным электродам, расположенным на измерительной базе с меньшей проекцией вектора В На фиг. 2 переключающие ключи 30 коммутатора 28 изображены в положении, когда сигнал с датчиком 14 превышает сигнал сДатчика 15. Коэффициенты усиления усилителей 18 устанавливаются автоматически за счет цепей АРУ так, чтобы независимо от абсолютного значения проекции вектора В на направления, перпендикулярные линиям, соединяющим измерительные электроды каждого из каналов, выходные напряжения усилителей соответствовали настоящему и фиксированному значениям модуля в . Таким образом, значение модуля вектора завихренности, определенное по (5), будет соответствовать не фактическому, изменяющемуся от пересечения к пересечению,модулю вектора В ,а постоянной величине, . одинаковой для всех каналов. Это обеспечивает сопоставимость результатов измерений. Коэффициент увеличения размера измерительных баз для рассматриваемого устройства , что позволяет легко определить граничные полосы полосовых фильтров 20 и характеристику корректирующего фильтра 21. Йрн установке на носителе датчика относительной скорости можно обеспечить управление характеристиками фильтров 20 и 21, что исключает погрешность за счет неравномерности движения носителя. Формула изобретения 1. Магнитогидродинамический способ измерения неоднородностей морских течений, основанный на измерении потенциалов электрического поля, индуцированного морскими течениями в магнитном поле Земли, от л и чающийся тем, что, с целью повышения точности и упрощения измерений, одновременно измеряют разность потенциалов в точках, расположенных на фиксированных расстояниях и ориентированных по двум направлениям, которые пересекаются под углом ±(45-135) полному векто ру магнитного поля Земли, и по частоте сигнала i и скорости перемещения точек наблюдения V определяют масштаб турбулентности о J , а по амплитуде сигнала судят о модуле век тора завихренности « ( : ч-6-г -е п(:5сг tf/Go) где ck- константа, определяющая взаимную ориентацию скорости морского течения, точки измерения и магнит ного поля Земли; В - проекция вектора магнитн индукции на плоскость, п пендикулярную измеритель ной базе 2(5- . 2.Способ по п. 1, отличаю щ и и с я тем, что при регистрации масштабов неоднороднОстей от Когпш до Йотах выбирают первую точку изме рения на расстоянии 2(5-; j; , от .нулевой, последнюю точку - на расст а все промежуто ные - на расстояниях в и, раз бол ших, чем предыдущие, где Уч - коэффи циент увеличения размера измеритель ной базы, выбираемый в пределах от 1,2 до 4. 3.Способ по п. 2, отлич а ющ и и с я тем, что измеряют разност потенциалов в полосе частот (1 - К ) есп(к4 1 -) (} f а частотное искажение исключают умножением измеряемого сигнала на sln (зс ). 4.Устройство для реализации способа по пп. 1, 2 и 3, состоящее из ряда измерительных каналов, каждый из которых включает последовательно соединенные два датчика, усилитель с автоматической регулировкой усиления (АРУ),полосовой полуоктавный и корректирующий фильтры и регистратор а-также датчиков магнитного поля Зем ли,- ориентированных параллельно измерительным базам многоэлектродного датчика, отличающееся тем, что пары измерительных датчиков расположены симметрично диаметральной плоскости носителя по линиям, пересекающим ее в точке установки нулевого электрода под углом ± 45-, причем, первая пара отстоит от нулевого электрода , на расстояние (2 - Г2)Воп1(пга все последующие на расстояние, вдвое большее, чем предыдущие, дополнительно введен коммутируемый ряд измерительных каналов, сигнальные входы ряда измерительных каналов подключены к симметричным парам измерительных датчиков , а управляющие входы АРУ включены параллельно и через формирователь управляющего напряжения и сумматор подключены к датчикам магнитноро поля, у коммутируемого ряда измерительных каналов одна из сигнальных клемм соединена с нулевым электродом, а вторая через переключающий ключ с одной из входных клемм рядаизмерительных каналов, а все управляющие входы АРУ также включены параллель-но и через второй формирователь и дополнительный переключающий ключ. подключены к датчикам магнитного поля, все ключи имеют общую цепь управления, подключенную через третий формирователь к выходу компаратора, входы которого соединены с датчиками магнитного поля. Источники информации, .дринятые во внимание при экспертизе . 1.Лоуренс Л. Электроника в океанографии, М., Воениздат, 1969, с. 211 - 217. 2.Ефимдев В. Н. и др. Измерение солености, скорости и направления орских течений, скорости распространения звука в морской воде, сер. Океанология, Обнинск, 1977, с. 8 - 24. . 3.Шули А. Электронная аппаратура океанографии, л., Гидрометеоиздат, 1967, с. 27 - 32. 4.Авторское свидетельство СССР о заявке 2444602/18-25, л. G 01 V 3/00, 19.01.77 (прототип).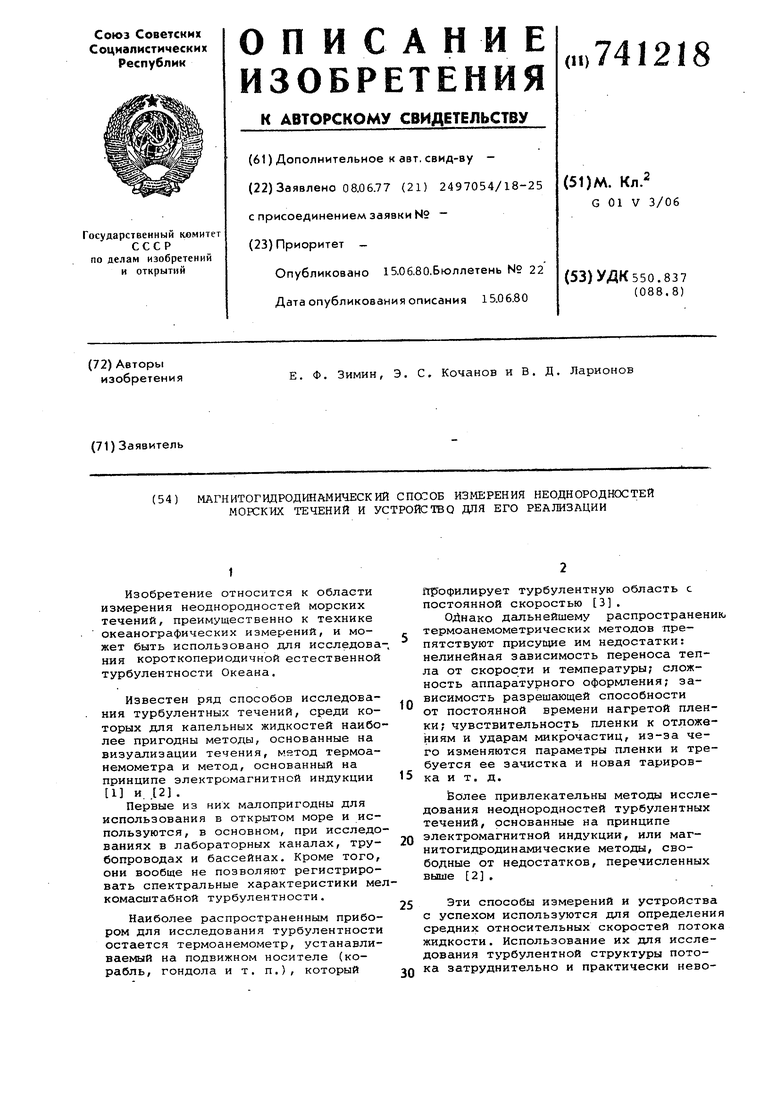

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТУРБУЛЕНТНОГО ПОТОКА ЖИДКОСТИ (ВАРИАНТЫ) | 2014 |
|
RU2561304C1 |
| Устройство для измерения пульсаций скорости потока жидкости | 1979 |
|
SU775699A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК | 2014 |
|
RU2556289C1 |
| Способ определения опасности цунами | 2020 |
|
RU2738589C1 |
| Электромагнитный первичный измерительный преобразователь скорости | 1979 |
|
SU960630A1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО КОНТРОЛЯ ЗАГРЯЗНЕНИЙ ВОДНОЙ СРЕДЫ, ДОННЫХ ОТЛОЖЕНИЙ И АТМОСФЕРЫ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ, УЛОЖЕННЫХ НА ДНЕ ВОДОЕМОВ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331876C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА МЕТОДОМ МАГНИТОМЕТРИЧЕСКОЙ СЪЕМКИ | 2013 |
|
RU2542625C1 |