Изобретение относится к управлению электрическими машинами и может бьп ь использовано при создании электроприводов с линейными асинхронными двигателями.
Цель изобретения - повышение надежности за счет упрощения конструкции, повьшения чувствительности и помехозащищенности датчика.
На чертеже показана функциональная схема линейного электропривода.
Электропривод содержит линейный асинхронный двигатель, состоящий из двух секций 1 и 2 индуктора, обмотки каждой из которых соединены по схеме звезда и подсоединены к блоку 3 управления двигателем, осуществляющим включение и отключение двигателя. Нулевые зажимы обмоток секций соединены с цепью, содержащей вторичную обмотку 4 разделительного трансформатора генератора 5 высокой частоты, первичную обмотку 6 измерительного трансформатора-и конденсатор 7. Вторичная обмотка измерительного трансформатора через подстроечный резистор 8 и вьшрямитель 9 связана с пороговым устройством - компаратором 10. Для питания электронных элементов электропривода служит блок. 11 I
Электропривод работает следующим
образом.
Обмотки секций линейного двигателя 1 и 2, обмотки 4 и 6 трансформато ного элемента амплитуда резонансных колебаний из-за внесения вторичных элементом дополнительных потерь, а также изменения индуктивности обмоток
5 секций резко падает, что приводит к падению уровня постоянного напряжения на входе компаратора и к срабатыванию последнего с вьщачей на блок управления команды на включение двигателя
10 Измерительная цепь датчика положения вторичного элемента обладает в пред- лагаем;ом электроприводе симметрией по отношению к трехфазной питающей сети. Напряжение нулевой последова1$ тельности, возникающее на нулевых выводах обмоток секций линейного асинхронного двигателя вследствие продольных краевых эффектов и искажений симметрии напряжения в питающей
20 сети, компенсируется и не сказывает влияния на работу датчика. Кроме того, как показал испытания опытного образца электропривода, вследствие сим1 4етричности измерительной цепи
25 резко падает уровень наводимых в ней радиопомех и помех, обусловленных работой мощной коммутационной аппаратуры. Возникающее при этом резкое увеличение отношения напряжений измеря- питания,30емого сигнала и помех на входе измерительного блрка датчика позволяет увеличивать чувствительность и быстродействие датчика без усложнения измерительной схемы.
40
45
ров, а- также конденсатор 7 образуют сложный колебательный контур, в котором с помощью генератора 5 высокой частоты возбуждаются колебания с частотой, близкой к основной резонансной частоте контура. При отсутствии над линейным индуктором вторичного элемента амплитуда колебаний и добротность резонансного контура максимальны. Высокочастотное напряжение, пропорциональное амплитуде резонансных колебаний, через измерительный трансформатор и подстроечный резистор 8, служащий для установки номинального Зфовня напряжения, подается на вьшря- митель 9, где выделяется его амплитудное значение. С выхода выпрямителя постоянное напряжение, пропорциональное амплитуде колебаний в резонансном контуре датчика, подается на вход компаратора 10, где формируется . команда на отключение двигателя, передавая блоку 3 управления. При появлении над секциями двигателя вторичТаким образом, в предлагаемом линейном электроприводе датчик положения вторичного элемента имеет повышенную помехозащищенность по сравнению с прототипом, поэтому не требуется установка блока динамических фильтров, что снижает сложность конструкции и стоимость датчика, увеличивая его чувствительность и повышая над{жность эхгектропривода в целом.
Формула изобретения
Линейный электропривод, содержащий линейный асинхронный двигатель с соединенной в звезду обмоткой индуктора, блок управления, двигателем и датчик положения подвижного элемента двигателя, включакаций цепь из последова- тельно соединенных вторичной обмотки разделительного трансформатора генератора высокой частоты и первичной обмоткн измерительного трансфоматора,
40
45
Таким образом, в предлагаемом линейном электроприводе датчик положения вторичного элемента имеет повышенную помехозащищенность по сравнению с прототипом, поэтому не требуется установка блока динамических фильтров, что снижает сложность конструкции и стоимость датчика, увеличивая его чувствительность и повышая над{жность эхгектропривода в целом.
Формула изобретения
Линейный электропривод, содержащий линейный асинхронный двигатель с соединенной в звезду обмоткой индуктора, блок управления, двигателем и датчик положения подвижного элемента двигателя, включакаций цепь из последова- тельно соединенных вторичной обмотки разделительного трансформатора генератора высокой частоты и первичной обмоткн измерительного трансфоматора,
312414054
вторичная обмотка которого через вы-защищенности датчика, указанный инпряьмтель связана с входом компарато-дуктор разделен на две секции, обмотра, выход которого подключен к входу ки каждой из которых соединены в
блока управления, отлича. ющий-звезду, а к нулевым вьюодам секций
с я тем, что, с целью повьшения на- 5через дополнительно введенный кондендежности путем упрощения конструкции,сатор подсоединена указанная цепь из
повышения чувствительности и помехо-обмоток трансформаторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный электропривод | 1982 |
|
SU1073865A1 |
| Электропривод | 1982 |
|
SU1051664A1 |
| РЕКУПЕРИРУЮЩИЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА С ДВУХЗВЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2014 |
|
RU2584002C1 |
| Транспортное средство с гибридной силовой установкой | 2018 |
|
RU2701282C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2031509C1 |
| МАЛОВЕНТИЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 2017 |
|
RU2702761C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2019 |
|
RU2722689C1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| Электропривод для механизма с вентиляторным моментом нагрузки | 1987 |
|
SU1494190A1 |
| УСТРОЙСТВО ОГРАНИЧЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ ПРИ АВАРИЙНЫХ РЕЖИМАХ | 1990 |
|
RU2014706C1 |
Изобретение относится к управлению электрическими машинами и направлено на повышение надежности электропривода с линейнь№1 асинхронным двигателем за счет упрощения конструкции, повышения чувствительности и по- мёхоз ащищенности датчика положения подвижного элемента двигателя. Индуктор двигателя состоит из двух сек- дий 1 и 2, обмотки каждой из которых соединены по схеме звезда -и подсоединены к блоку управления 3. Нулевые зажимы обмоток секций соединены с цепью, включающей вторичную обмотку 4 разделительного трансформатора генератора 5 высокой частоты, первичную обмотку 6 измерительного трансформатора и конденсатор 7. Обмотки 1 и 2 и упомянутая цепь образуют сложный . колебательньй контур, амплитуда колебаний и добротность которого при отсутствии над индуктором подвижного элемента максимальны и резко падают, при его появлении. Измерительная цепь такого датчика положения обладает симметрией по отношению к трехфазной питающей сети, вследствие чего резко падает уровень наводимых в ней радиопомех и помех от мощной коммутационной аппаратуры. 1 ил. с б (Л ел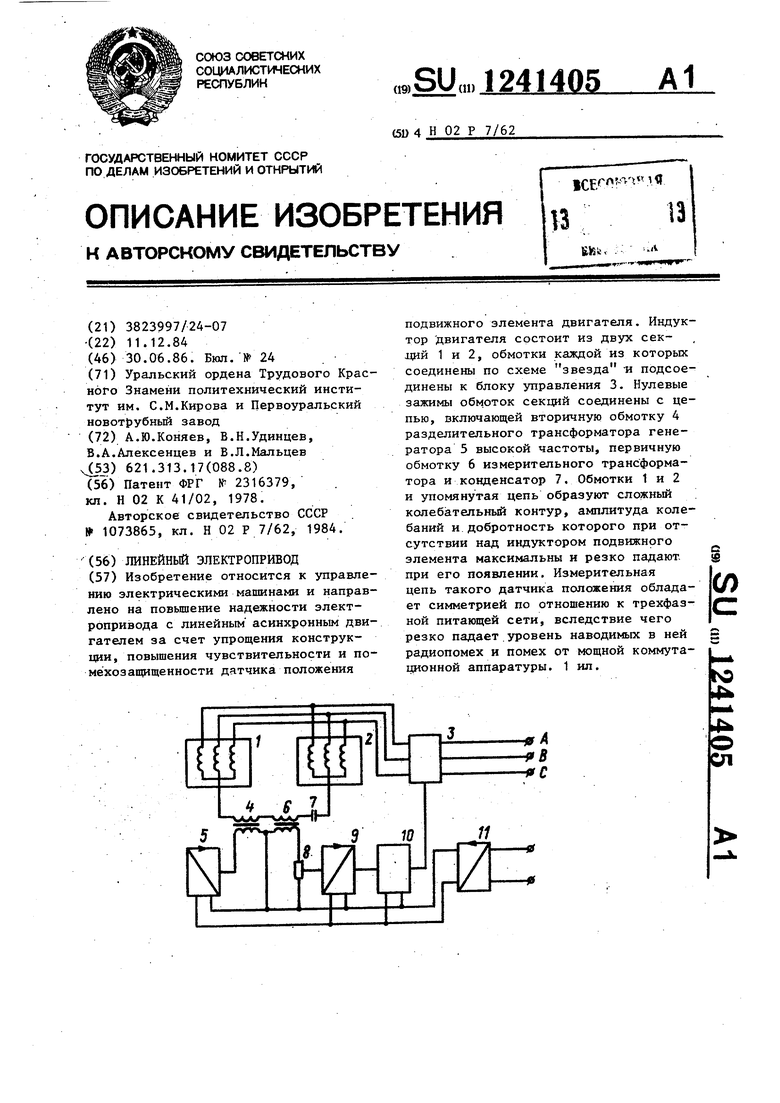
| ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД |
