Изобретение относится к электротехнике и может быть использовано при создании электроприводов с линеными асинхронньфли двигателями.
Известен электропривод на базе линейного асинхронного двигателя, вторичный элемент которого имеет ограниченную длину и при работе двигателя занимает различное положение по отношению к индуктору ClJНедостатком такого привода является значительное увеличение потребляемого тока при отсутствии вторичного элемента над индуктором линейного асинхронного двигателя, что приводит к непроизводительному увеличению потребляемой из сети мощности, перегреву двигателя и, как следстпие, к снижению эксплуатационной надежности и увеличению затрат на эксплуатацию электропривода. Кроме того, в этом случае приходится устанавливать аппараты управления . электроприводом, рассчитанные на повышенный ток. Поэтому подобный электропривод, как правило, снабжается различными датчиками положения вторичного элемента, управляющими включением или отключением линейног двигателя при наличии или отсутствии над его индуктором вторичного элемента. Наиболее часто применяются бесконтактные датчики: фотоэлектрические , емкостные, индуктивные и с магнитоуправляелыми контактами .
Наиболее близким по технической сущности к предлагаемому является линейный электропривод, содержащий линейный асинхронный двигатель с соединенными в звезду фаэньичи обмотками индуктора, датчик положения вторичного элемента двигателя и бло управления. При попадании в зону чувствительности датчика вторичного элемента линейного асинхронного двигателя датчик вырабатывает команду, поступающую на. блок управления двигателем и обеспечивающую работу электропривода Г2.
Недостатками привода являются пониженная надежность, так как для его работы необходимо малое расстоя ние между датчиком и вторичным элементе линейного асинхронного двигателя (расстояние коммутации К Кроме того, датчик имеет низкую механическую прочность, что приводит к частому выходу электропривода из строя. Увеличение же расстояния коммутации требует существенного увеличения габаритов и стоимости датчиков подобного типа. В условиях сильных магнитных полей индуктивные датчики необходимо устанавливать на некотором, расстоянии от линейных индукторов, что приводит к ложному срабатыванию электропривода в случае, когда вторичная часть находясь над датчике, не перекрывает индуктор линейного асинхронного двигателя.
Цель изобретения - повьниение надежности электропривода за счет устранения ложных включений и улучшения защиты датчика.
Указанная цель достигается тем, что в линейном электроприводе,
0 содержащем линейный асинхронный двигатель, с соединенными в звезду фазными обмотками индуктора, датчик положения вторичного элемента двигателя и блок управления, датчик вклю5- чает в себя измерительный трансфер- . матор, компаратор, три конденсатора и генератор высокой частоты с разделительным трансформатором, вторичная обмотка которого соединена с нуле0 вюй точкой индуктора и включена последовательно с первичной обмоткой измерительного трансформатора, второй вывод которой соединен с выводами трех конденсаторов, другие
С выводы которых подключены к фазным обмоткам индуктора, а вторичная обмотка измерительного трансформатора связана с входом компаратора, выход которого подключен к входу блока управления.
На чертеже показана функциональная схема электропривода.
Электропривод содержит линейный асинхронный двигатель 1, обмотка которого соединена по схеме звезда
5 и имеет три двигательных зажима
(А, В, С ) и нулевой зажим (N) , анализирующий блок 2 и блок 3 управления двигателем, осуществляющий включение и отключение индуктора.
0 В состав анализирующего блока входят генератор 4 высокой частоты, высокочастотные трансформаторы 5 и 6, подстроечный резистор 7, конденсаторы 8-11 блок 12 динамических
5 фильтров, пороговое устройство - компаратор 13 и блок 14 питания. Резонансный контур датчика включает кроме последовательно соединенных обмоток высокочастотных трансформап торов 5 И 6, конденсаторов 8-11,
находящихся в одном блоке, .также обмотку линейного асинхронного двигателя. В указанном резонансном контуре с помощью генератора 4 высокой частоты через трансформатор 5 возбуждаются резонансные колебания с частотой, определяемой внутренними параметрами контура. При отсутствии над индуктором линейного асинхронного двигателя вторичного элемента
0 добротность контура и амплитуда
резонансных колебаний в нем максимальны, при появлении же вторичной части в контур вносятся потери, вызывающие уменьшение амплитуды колеба5 НИИ вследствие уменьшения добротности, что и используется для уп 1авления двигателем в функции положения вторичного элемента.
Электропривод работает следующим образом.
Высокочастотное напряжение с вторичной обмотки измерительного трансформатора 6 через подстроечный резистор 7, служащий для установки нсминального уровня напряжения, подается на вход блока 12 динамических фильтров, предназначенного для выделения адтлитудного значения высокочастотного напряжения и подавления помех, возникающих при работе тиристорных электроприводов. Постоянное напряжение, пропорциональное амплитуде высокочастотных колебаний в контуре датчика, подается с выхода блока динамических фильтров на вход порогового устройства - компаратора 13 выполненного в виде компаратора с гистерезисом и регулируемым в определенных пределах порогом срабатывания. В случае отсутствия над индуктором линейного двигателя вторичного элемента амплитуда высокочастотных колебаний максимальна, следовательно, максимален и уровень постоянного напряжения, поступающего с выхода блока динамических фильтров. Это позволяет с помощью регулировки порога срабатывания компаратора формироват сигнал на отключение линейного электродвигателя 1 от питающей сети. При появлении над индуктором линейного двигателя 1 вторичного элемента амплитуда высокочастотных колебаHHR В контуре датчика падает, что ,. в свою очередь, вызывает резкое уменьшение уровня постоянного напряжения на выходе блока 12 динамических фильтров и ведет к срабатыванию
компаратора 13 с выдачей на блок 3 управления команды на включение линейного асинхронного электродвигателя 1. При уходе вторичной части с индуктора линейного Двигателя 1 рез0ко повышаются амплитуда высокочастотных колебаний в контуре датчика и уровень постоянного напряжения на выходе блока 12 динамических фильтров, срабатывает компаратор 13 с
5 выдачей на блок 3 управления двигателем команды на отключение линейного двигателя 1 от питающей сети.
Таким образом, в предлагаемом электроприводе управление линейньйл асинхронным двигателем производится
0 без отдельного датчика положения вторичного элемента, функции которого выполняет контур, составной частью которого является индуктор
5 линейного асинхронного двигателя. В таком электроприводе чувствительность, энергетические характеристики и механическая прочность датчика положения определяются габаритами и степенью защиты линейного индуктора.
0 Пространственное совмещение датчика положения и индуктора линейного асинхронного двигателя упрощает монтаж электропривода и исключает возможность ложного срабатывания
5 двигателя при отсутствии над индуктором вторичного элемента, что повьииает надежность электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный электропривод | 1984 |
|
SU1241405A1 |
| РЕКУПЕРИРУЮЩИЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА С ДВУХЗВЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2014 |
|
RU2584002C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2019 |
|
RU2722689C1 |
| УСТРОЙСТВО ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2530532C1 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2006 |
|
RU2300169C1 |
| ЧАСТОТНЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2581629C1 |
| Управляемый электропривод | 1984 |
|
SU1197031A1 |
| Электропривод переменного тока | 1989 |
|
SU1713071A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ МОМЕНТА МАХОВИЧНОГО ДВУХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ТОЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 1968 |
|
SU1840055A1 |
ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД, содержаний линейный асинхронный двигатель с соединенными в звезду фазными обмотками индуктора, датчик положения вторичного элемента двигателя и блок управления, о тл и ч а ю щ и и с я тем, что, с целью повышения надежности электро-: привода за счет устранения ложных включений и улучшения зашиты датчика, он включает в себя измерительный трансформатор, компаратор, три конденсатора и генератор высокой частоты с разделительным трансформатором, вторичная обмотка которого соединена с нулевой точкой индуктора и включена последовательно с первичной, обмоткой измерительного трансформатора, второй вывод которой соединен с выводами трёх конденсаторов , другие выводы которых подключены к фазным обмоткам индуктора, а вторичная обмотка измеритель-i (Л ного трансформатора связана с входом компаратора, выход которого с подключен к входу блока управления. DO X О) СП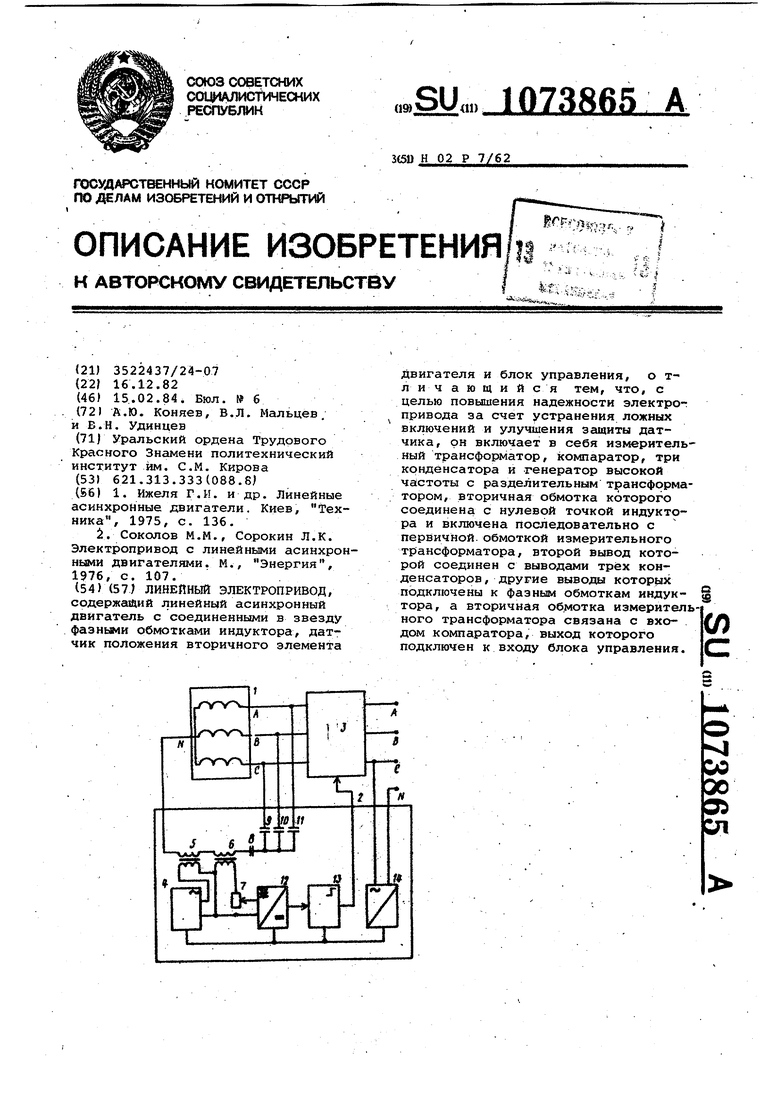
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ижеля Г.И | |||
| и др | |||
| Линейные асинхронные двигатели | |||
| Киев, Техника, 1975, с | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| i | |||
| Соколов М.М., Сорокин Л.К | |||
| Электропривод с линейными асинхронными двигателями | |||
| М., Энергия, 1976, с | |||
| Счетный сектор | 1919 |
|
SU107A1 |
