Изобретение относится к испытательным стендам ручных механизмов возвратно-поступательного действия и может быть использовано в машиностроении.
Цель изобретения - приближение режима нагружения к реальным условиям работы путем одновременного приложения к рабочему органу дополнительной силы с изменением максимального ее значения, совпадающего с направлением основной силы до максимального значения, направленного в противоположную сторону.
На фиг. 1 изображена схема действия сил, приложенных к рабочему органу, Р|макс; на фиг. 2 - то же, PIMHH; на фиг. 3 - схема устройства для осуществления способа; на фиг. 4 - схема возможного варианта устройства для осуществления способа; на фиг. 5 - зависимости сил от величины хода рабочего органа испытываемого объекта.
Способ испытания ручных машин осуществляется следующим образом.
На испытываемый объект 2 действуют основной силой РО, которая линейно изменяется в зависи.мости от величины хода и направлена вдоль оси движения рабочего органа 1. Одновременно с основной силой РО на объект действуют дополнительной силой Р|, величина и направление которой изменяются в зависимости от величины хода от максимума P| (Р|макс), направленного в ту же сторону, что и основная сила РО (фиг. 1), до минимума PI (PiMmi), направленного в противоположную сторону (фнг. 2).
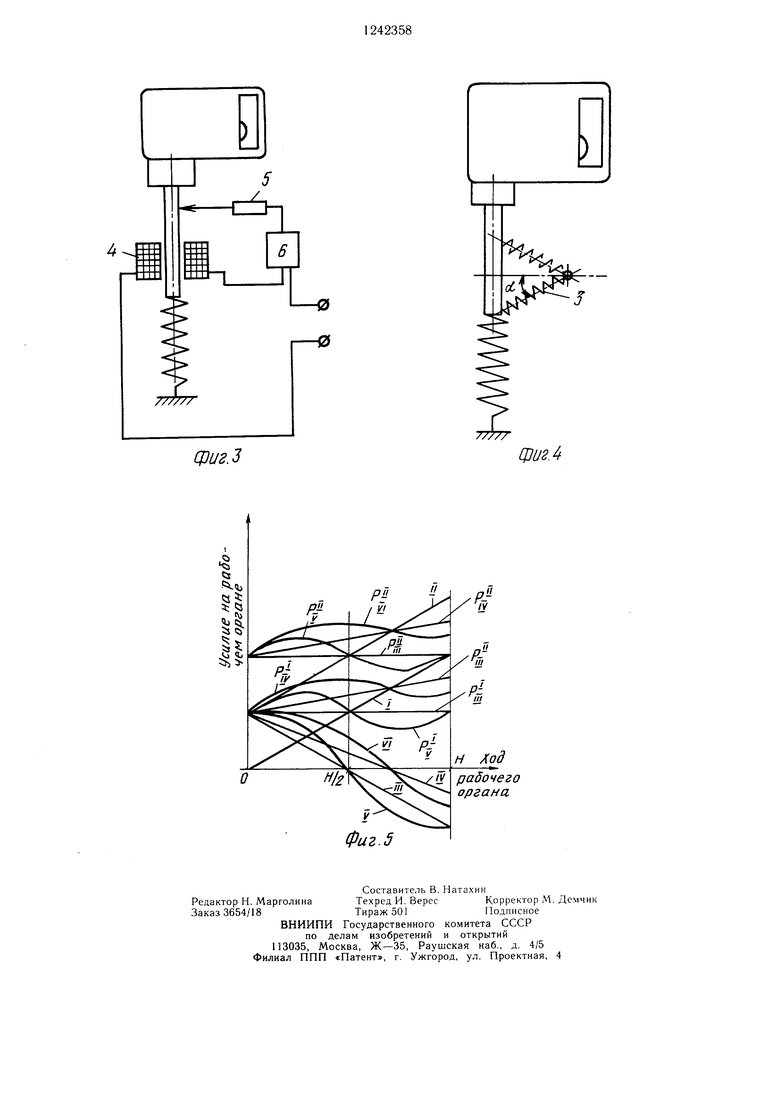
Такое испытание объекта может быть выполнено с помощью устройства (фиг. 3), где электромагнит 4, связанный с датчиком 5 положения рабочего орг ана 1 и осуществляющий приложение силы Р| с изменением ее величины и направления с помощью коммутационного устройства 6, установленного между электромагнитом 4 и датчиком 5.
Изменение основной силы РО (фиг. 5) показано прямой I, а изменение дополнительной си,лы -J прямой III. Суммарные прямые Pj и P,-Ji показывают характер резуль- тируюГцей силы нагружения.
5
0
Точка перехода дополнительной силы через нуль Pjy может быть смещена относительно середины хода рабочего органа испытуемого объекта, при этом получается другой закон нагружения (прямые Р,, Р|| на фиг. 5).
Способ реализуется с помощью устройства (фиг. 2). Коммутация питания электромагнита 4 во время движения рабочего органа испытуемой мащины обеспечивает пе- 0 реход силы электромагнита через нуль в любой заданной точке хода в зависимости от положения датчика.
Дополнительная сила изменяется пропорционально синусу угла фазы движения точки, повторяющей движение рабочего органа испытуемого объекта от начала до конца нагружения вдоль оси приложения силы. Таким образом, дополнительная сила Р| К sin а, где а - угол фазы движения точки А на фиг. 1.
Такое нагружение может быть осуществле - но, например, с помощью устройства (фиг. 4), где дополнительная сила прикладывается предварительно сжатой пружиной 3, положение которой изменяется в течение хода нагружения в соответствии с измене- нием угла а фазы движения точки А, в зависимости этой силы от величины хода показана на фиг. 5 кривой V. Кривая VI показывает возможность изменения обплего усилия нагружения (вместо кривых Ру для кривой V) с получением кривой для другого, характера нагружепия, получаем кривые P-J - для кривой VI.
Таким образом,предлагаемый способ дает возможность изменения закона нагружения испытуемого объекта а щироких пределах. В частности, кривая Р., (фиг. 5) обеспечивает нагружение эл ектролобзика практически постоянной силы, которая изменяется примерно так, как при реальной работе - врезание пильного полотна по всей длине реза с ростом усилия и последующее снижение усилия по мере выхода пильного полотна из контакта с разрезаемым материалом.
Таким образом, предлагаемый способ испытания позволяет приблизить режим нагружения к реальным условиям работы ручных машин возвратно-поступательного действия.
0
0
IJHOUK
фиг.1
П-41и.Нof I
-sy
Л фиг. г
CpU2.3
фиг. 4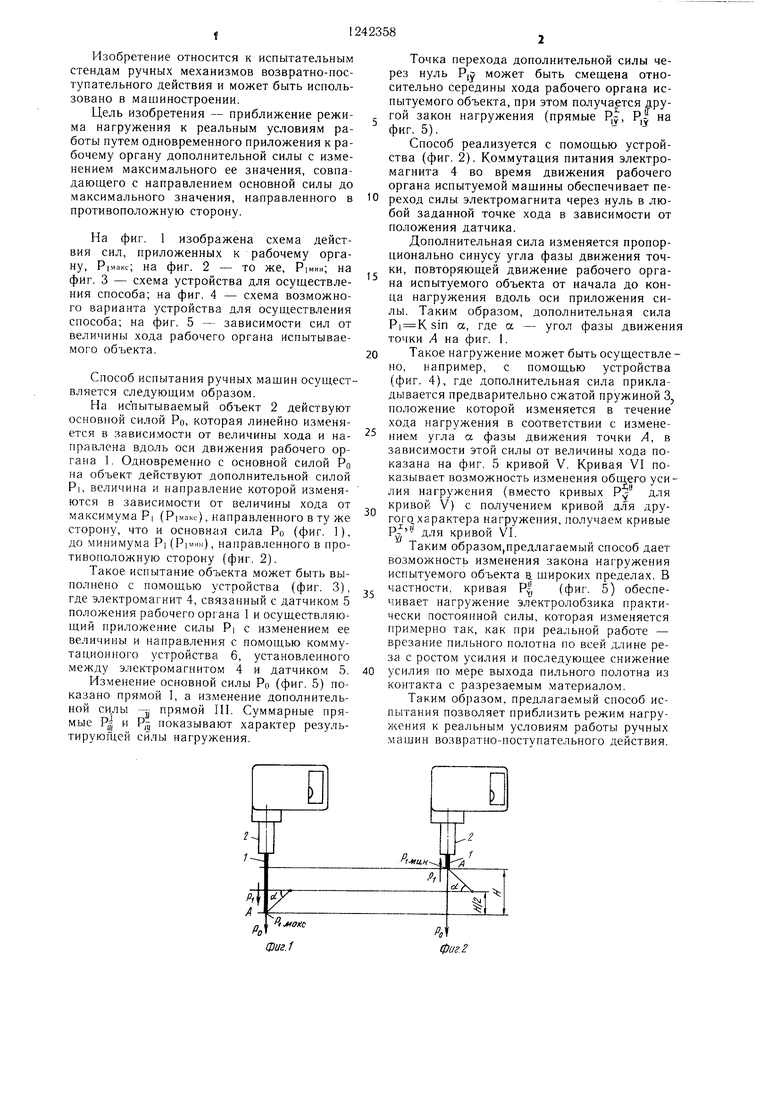
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный тормоз для нагрузочных устройств | 1978 |
|
SU932308A1 |
| Стенд для испытания ручных шлифовальных машин на надежность | 1977 |
|
SU615383A1 |
| Устройство для испытания ручных машин возвратно-поступательного действия | 1978 |
|
SU750315A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ШВЕЙНЫХ МАТЕРИАЛОВ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2538725C2 |
| Устройство для испытания и замера усилий кузнечно-прессовых машин возвратно-поступательного действия | 1974 |
|
SU557283A1 |
| Стенд для испытания ручных электроинструментов | 1985 |
|
SU1265499A1 |
| Устройство для управления распиловочным станком | 1985 |
|
SU1273254A1 |
| Стенд для испытания ручных ударных инструментов | 1979 |
|
SU854705A1 |
| Способ поперечной инерционной распиловки лесоматериалов круглыми пилами | 1983 |
|
SU1357226A1 |
| Лесозаготовительная машина | 1988 |
|
SU1713804A1 |
н Аод
рабочего органа
Составитель В. Натахин
Редактор Н. МарголинаТехред И. ВересКорректор Л1. Демчик
Заказ 3654/18Тираж 501Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Устройство для испытания ножниц | 1973 |
|
SU470726A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения усилия на ноже ручных электроножниц | 1972 |
|
SU446780A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
