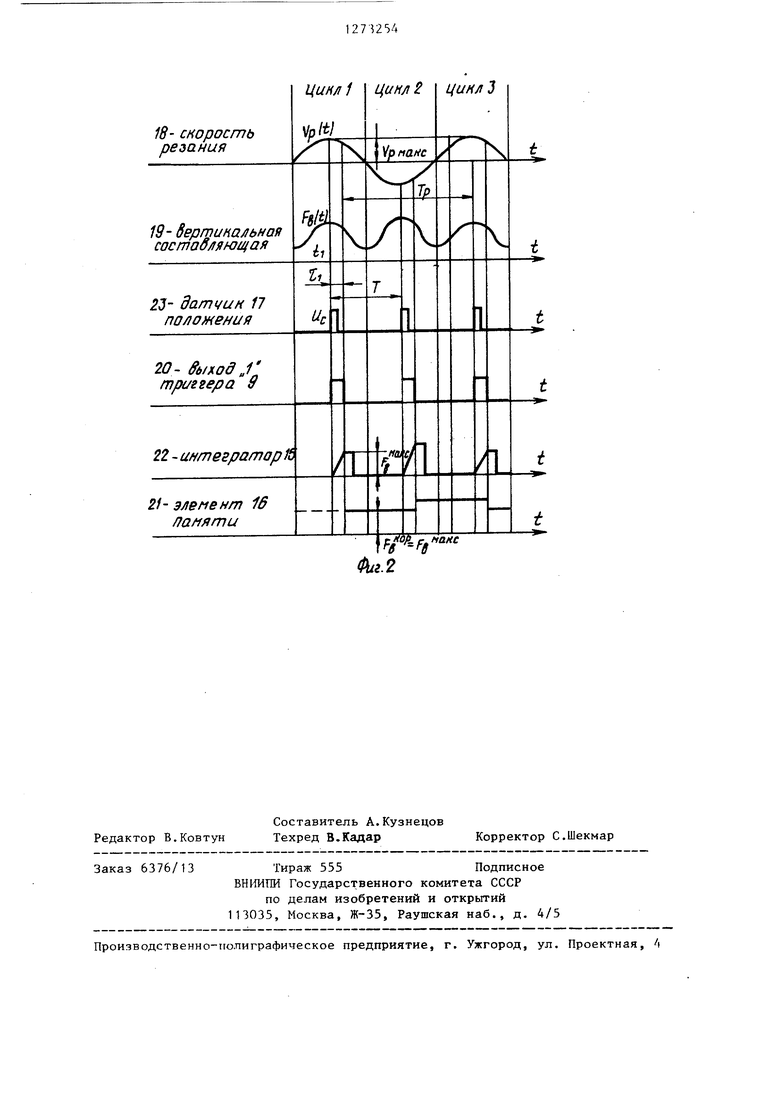
Изобретение относится к автоматизации технологических процессов в камнеобрабатывающей промышленности и может быть использовано, например для управления распиловкой камня на штрипсовых станках. Цель изобретения - повышение точности управления. На фиг. 1 приведено устройство для управления распиловочным станком; на фиг. 2 - временные диаграммы работы. Устройство для управления распиловочным станком содержит электродви гатель 1 резания (главный двигатель кинематически связанный с,пильной ра мой 2 посредством маховика с кривоши пом 3 и шатуна 4, электродвигатель подачи пильной рамы 2, кинематически связанный с ней через опорную раму и подвески 7, датчик 8 нагрузки пил ной рамы 2, триггер 9, элементы задержки 10 и 11, дифференциатор 12, блок задания 13, регулятор 14, интегратор 15, элемент 16 памяти, датчик 17 положения рамы. Блок 13 задания предназначен для задания оптимальной величины F регулируемого параметра - максимального за ход пильной рамы 2 значения вертикальной составляющей ее нагрузки (под оптимальной понимается близкая к максимально допустиF . пр мому значению величина . превьшзении которого возможен увод штрипсовьпс пил рамы 2). В качестве блока 13 задания может быть взят задатчик типа РЗД. Регулятор 14 служит для сравнени задания Р регулируемого параметра с его измеренным значением pxqp и усиления разностного сигзал j-Kop
необходо величины напряжения
а
димого для управления электродвигателем 5 (например, прибор РВА).
Между регулятором 14 и электродвигателем 5 может быть включен согласующий элемент в виде преобразователя, который осуществляет плавное регулирование скорости вращения W электродвигателя 5 подачи в заданном диапазоне по сигналу управления Uy от регулятора 14. Поскольку в распи,11
С „
,
Я
Триггер 9, элементы задержки 10 и 11 и дифференциатор 12 предназначены для формирования из периодического переменного сигнала вертикальной составляющей Fg нагрузки рамы 2, измеренной датчиком 8, сигнала
(6)
макс
-г ловочных станках для paRoqeii подачи применяются в основном электродвигатели постоянного тока, то в качестве согласующего элемента могут быть использованы тиристорные преобразователи постоянного тока, например, типа БТУ. Датчик 8 нагрузки пильной рамы представляет собой трансформатор тока, первичная обмотка которого включена в цепь якоря электродвигателя 5 постоянного тока рабочей подачи пильной рамы 2. Датчик 8 измеряет вертикальную составляющую Fg нагрузки, приложенной к пильной раме 2, с высокой точностью. Вертикальная составляющая Р создает на валу двигателя 5 подачи нагрузку (момент сопротивления) Р где рп - радиус приведения поступательного вертикального движения рамы 2 к валу электродвигателя 5, которьш находится из выражения (3) - линейная скорость опускания пильной рамы 2; W - угловая скорость вращения электродвигателя 5 подачи. Момент М J развиваемый электро двигателем 5 постоянного тока, про- порционален току его якоря 3 , т.е. /Л сЗ , (4) где С - коэффициент пропорциональности, зависящей от конструкции электродвигателя. Поскольку при установившемся движении М « ЛЛр , то из выражения (2) И (4) следует, что т.е. сигнала, равного максимальному противодействию распиливаемого камн оказываемому им на пильную раму 2 в момент наиболее тесного контакта штрипсовых пил с камнем при среднем положении рамы 2. На фиг. 2 показана (кривая 18) зависимость скорости Vp резания пил ной рамы 2 от времени Vp (t) . Рам 2совершает возвратно-поступательное движение посредством маховика 3с кривошипом и шатуна 4 (фиг. 1), поэтому кривая 18 представляет собо равную времени двой синусоиду ного хода рамы 2, т.е. макс . Sir f :М„ -5110- ; - амплитудное значение скорости. Кривая 19 изображает зависимость Fg(f) вертикальной составляющей F нагрузки рамы 2 от времени, кото рая является периодической функцией с периодом ,(8) поскольку пиление происходит как при прямом, так и обратном ходе рамы 2. Интегратор 15 предназначен для интегрирования указанной функции Fg (1) в области ее максимума, когда к пилам рамы 2 прикладывается наибольшее противодавление Р камня. Эта область задается выходом триггера 9, сигнал на котором имеет длительность t, и начинается в момент времени t, (кривая 20). Благо1- даря применению интегратора 15 вьзделявтся не мгновенное значение сигнала Fg (f) , а среднее за интервал ff. i +0,1 . Это повьш1ает точност J .- jMaxc измерения сигнала Fg , поскольку в реальных условиях возможны случайные отклонения сигнала F. от г макс / .F g, (колебания напряжения сети, влияние структуры камня и т.д.). Элемент памяти 16 (кривая 21) слу жит для хранения вычисленного интег4 гс маге ., ратором 15 значения rg (кривая 22) в течение периода Т функции РВ(-Ь) . Датчик 17 положения пильной рамы 2 служит для синхронизации работы, момент срабатывания датчика 17 долже соответствовать моменту времени i,, области максимума функции (f). этого он размещается на стенке , чтобы фиксировать среднее положение подвесок 7 рамы 2. Датчик 17 представляет собой бесконтактный выключатель типа КВП-16. Устройство работает следующим образом. После установки камня на станке и врезания в него пил рамы 2 с помощью блока 13 задания устанавливают оптимальное задание с учетом вида камня, количества пил в раме 2 и длины реза. После этого электропривод 5 подачи рамы 2 переводя т-- на автоматический режим работы. В автоматическом режиме в момент прохождения подвесок 7 пильной рамы 2 места установки датчика 17 положения последний срабатывает и вьщает импульсы синхротгизации У (кривую 23). Сигналом 0 триггер 9 устанав 1. На выходе ливается в состояние 1 триггера 9 появляется единичный сигнал, который поступает на вход интегратора 15 (фиг. 1) и разрешает его работу. Интегрирование продолжается дочтех пор, пока через время t, на выходе элемента 10 с величиной задержки с, не появится импульс датчика 17 положения и триггер 9 не установится в состояние О. Одновременно на выходе О триггера 9 появляется единичный уровень сигнала, который на выходе дифференциатора 12 превращается в импульс, разрешающий запись вычисленного интегратором 15 за интервал времени i, , t,+2il среднего значения нагрузки Р: мсткс g элемент памяти 16. Элев ., Mate 4 .Г хранит величину FB течение одного цикла работы станка (периода Т ) до тех пор, пока при обратном ходе пильной рамы 2 на его вход не постуштт новое измеренное значение F J . . Для подготовки к аботе в следующем цикле интегратор 15 сбрасывается. Этот сигнал появяется через промежуток времени i осле импульса записи на выходе диференциатора 12, когда показание нтегратора 15 уже нанесено в элемент 16. Интервал Гг обеспечивается элеeJrtoM 11 задержки. В каждом цикле работы регулятор 14 сравнивает измеренное значение t кор .- мачг егулируемого параметра г - г , оступшоцее от элемента памяти 16, с заданным блоком 13 задания значением F , Если разность , (9) что является следствием вскрытия и начала распила твердых включений в камне, то регулятор 14 уменьшает скорость п подачи пильной рамы 2. В результате давление f ц на штрипсы уменьшается до допустимой величины. Таким образом, прохождени области твердьпс включений происходи с меньшей производительностью Q , однако она является максимально возможной для сложившейся ситуации. При выходе на более мягкие участки камня величина падает, разность uF становится положительной и устройствоотрабатьшает скорость подачи рамы 2 в сторону увеличения производительности. Если в силу конструктивных или технологических особенностей станка затруднена установка датчика 17 пол жения в плоскости качания подвесок 7 пильной рамы 2, то в этом случае датчик 17 может быть размещен, например, в плоскости вращения махови ка 3, на котором дополнительно уст навливаются два диаметрально противоположных флажка, взаимодействующие при вращении маховика 3. Такая установка датчика 17 эквивалентна приведенной ранее, поскольку при этом частота следования его выходн импульсов синхронизации {., (10) где V/ р - угловая скорость вращен маховика 3, и так как то из выражений (8), (10) и (11) следует, что период синхронизации равен периоду функции T,.j. T.(,2) Данное устройство позволит повысить точность управления, а следовательно, и производительность распиловки, при этом обеспечивается высокое качество продукции, повьшгается коэффициент использования оборудования. Формула изобретения Устройство для управления распиловочным станком, содержащее электродвигатель резания, кинематически связанный с пильной рамой, датчик нагрузки, блок задания и электродвигатель подачи пильной рамы, отличающееся тем, что, с целью повышения точности управления, оно снабжено датчиком положения рамы, регулятором, элементом памяти, интегратором, триггером, двумя элементами задержки и дифференциатором, причем датчик положения рамы подключен к одному из входов триггера и к входу первого элемента задержки, выход которого подключен к другому входу триггера, один из выходов которого соединен с одним из входов интегратора и с входом второго элемента задержки, выход которого под-, i ключен к другому входу интегратора, другой выход триггера соединен через дифференциатор с одним из входов элемента памяти, выход элемента памяти соединен с одним из входов регулятора, другой вход которого соединен с блоком задания, а выход регулятора соединен с электродвигателем подачи пильной рамы, который подключен к входу датчика нагрузки, выход которого соединен через интегратор с другим входом элемента памяти.
Фи1.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления камнераспиловочным станком | 1986 |
|
SU1337269A1 |
| Устройство для натяжения штрипсовых пил распиловочных станков | 1990 |
|
SU1768401A1 |
| Способ установки штрипсов распиловочного станка и устройство для его осуществления | 1985 |
|
SU1299811A1 |
| СТАНОК ДЛЯ РАСПИЛОВКИ ПРИРОДНОГО КАМНЯ | 1998 |
|
RU2150384C1 |
| Способ управления подачей абразива при штрипсовой распиловке камня | 1987 |
|
SU1431937A1 |
| ШТРИПСОВАЯ ПИЛА ДЛЯ РАСПИЛОВКИ КАМНЯ | 1991 |
|
RU2020070C1 |
| Станок для распиловки камня | 1990 |
|
SU1735024A1 |
| Распиловочный станок для обработки камня | 1977 |
|
SU631354A1 |
| Устройство для распиловки камня | 1983 |
|
SU1197859A1 |
| Устройство для управления распиловочным станком | 1978 |
|
SU686883A1 |
Изобретение относится к области автоматизации технологических процессов в камнеобрабатывающей промышленности. Может быть использовано, например, для управления распиловкой камня на штрипсовых. станках. Позволяет повысить точность управления. Устройство содержит электродвигатель 1 резания, кинематически связанный с пильной рамой 2 посредством маховика с кривошипом 3 и шатуна 4, электродвигатель 5 подачи пильной рамы 2, кинематически связанный с ней через опорную раму 6 и подвески 7, датчик 8 нагрузки пильной рамы, триггер 9, элементы задержки 10 и 11, дифференциатор 12, (в блок задания 13, регулятор 14, интегратор 15, элемент 16 памяти, датСО чик 17 положения рамы. 2 ил. -1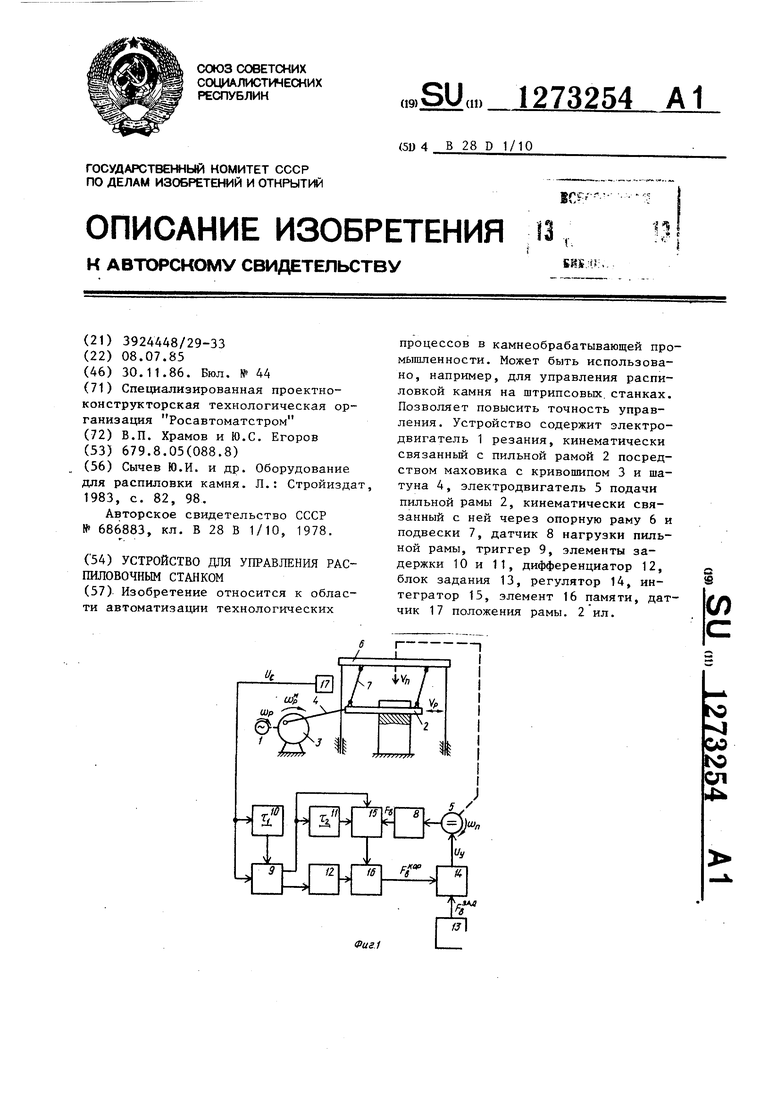
| Сычев Ю.И | |||
| и др Оборудование Л.: Стройиздат, для распиловки камня 1983, с | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Устройство для управления распиловочным станком | 1978 |
|
SU686883A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
