Изобретение относится ic контрольно-измерительной технике, в частности к измерению электрических (емкость конденсатора индуктивност и неэлектрических величин,, KOTojSbie можно преобразовать при помощи индуктивных или емкостных датчиков.
Цель изобретения - повьшшние чув ствительности и быстродействия фазо генераторного преобразователя.
На фиг.1 представлена структурна схема устройства, реализующего способу на фиг,2 - временные диаграммы работы устройства.
Фазогенераторный преобразователь состоит из датчика 1, первого генератора 2, компенсирующего блока 3, второго генератора 4 управляемого блока 5 СВЯЗИ; фазового Iiз 5epитeля 6 и блока 7 управления,
Датчик 1 связан с первым генератором 2, второй генератор 4 связан с компенсирующим блоком З фазовый измеритель 6 подключен выходом к блоку 7 управления, вы.ходы блока 7 управления соединены с управляемьш блоком 5 связи, блоком 3 компенсации и фазовьм измерителем б«
Способ определения параметра, фазогенераторным преобразователем осуществляют следующим .образом.
Связывают генераторы 2 и 4 управляемым сопротивлением блока 5 что обеспечивает взаимную синхрони- зац.ию генераторов, при этом настраивают генераторы так, чтобы фазовый сдвиг мелсду их выходными сигналами бы.л близок или равен нулю, т.е. не. превышал некоторого начального малого значения Pн При помощи датчика 1, взаимодействующего с контролируемым объектом, выводят расстройку генератора 2, Срывают взаимную синхронизацию генераторов путем увеличения сопротивления связи до величины RG RCMAK.C в блоке 5, С этого момента пропорционально времени и расстройке генератора 2,, нарастает фазо.вый сдвиг между сигналами генераторов.
Спустя время t,i после срыва синхронизации, производят измерение фазового сдвига между сигналами генераторов „ По результату измерения фазового сдвига при помоир-1 блока 3 подстраивают генератор 4 так, чтобы скомпенсировать фазовый сдвиг, вызванный расстройкой генератора 2. Восстанавливают синхронизац ™ генераторов путем уменьшения сопротив- ления связи до величины Re Re ммн. Вследствие малого сопротивления связи длительность переходного процесса восстановления синхронизации и установления нового значения фазового сдвига будет небольшой. По величине компенсирующей подстройки в генераторе 4 судят о величине контролируемого или измеряемого датчиком 1 параметра объекта.
Компенсирующая подстр.ойка генератора 4 как при использовании известного способа, так и предлагае.-ЮГО может производиться за несколько тактов методом последовательного прибли;женйя,
Преобразователь, реализующий способ, работает следуюш н образом.
В исходном состоянии датчик 1 находится в нулевом положении и не вносит расстройки в генератор 2, при этом генераторы 2 и 4 настроены так, что их собственные частоты и)
равные или очень близкие (собственные частоты - это частоты не связанных генераторов). После вк.пючения цепи связи .8 блоке 5 генераторы начнут работать в режиме взаимной синхронизации на частоте i-Jo а между их выходными сигналами возникнет начальный фазовьш сдвиг / м .
35
При (л)2. ) частота и)и -feJ2-- И f/j О, а при t Js/ ч - - оРасполагается между о) 1 и (О/ч и f к У: о.
В реальном преобразователе настроить генераторы так, чтобы ьОг Ч трудно, поэтому далее будем рассматривать второй случай при cJ -. uJi/.
В исходном состоянии выходные напряжения генераторов описываются следующими зависимостями:
Uj - иог
Uc,2 Ui, Uoi, sin(cJot+-f4),
(1)
где U2 , UH , Uo2 5 U(X( - текущие и амплитудные значения выходных сигналов генераторов 2 и 4 соответственно.
Пусть в некоторый момент времени под воздействием изменившегося контролируемого параметра объекта дат- чик 1 вносит расстройку в генератор 2, При этом изменяется частота (. на величинуйч)р и возникает дополнительный фазовый сдвиг P (ийдеке -Р обозначает расстройку), а сигналы Uj и U4 принимают вид
и, Uoгsin(lJЗc+йu)p)t
h
Uo sin(a)o+ub)p)t+fH-«- l p . (2)
Из выражения (2), следует, что контролируемая величина, преобразованная в расстройку генератора 2, может быть измерена в том случае, если превысит порог чувствительности фазового измерителя.
В преобразователе, управляемом согласно известному способу, при цнЦ р Орор измерение не может быть произведено, так как фазовый измеритель 6 не срабатывает. Повьшение чувствительности преобразователя в этом случае может быть достигнуто
за счет повьшения чувствительности
(уменьшения | qo) фазового измерителя, что сопряжено с большими трудностями и не всегда выполнимо.
Способ определения параметра фа- зогенераторным преобразователем поз- воляет получить высокую чувствительность фазового измерителя. Достигается это за счет того, что перед измерением фазового сдвига производя срыв синхронизации генераторов путем увеличения сопротивления связи в блоке 5 до величины RC RC MCIKC,
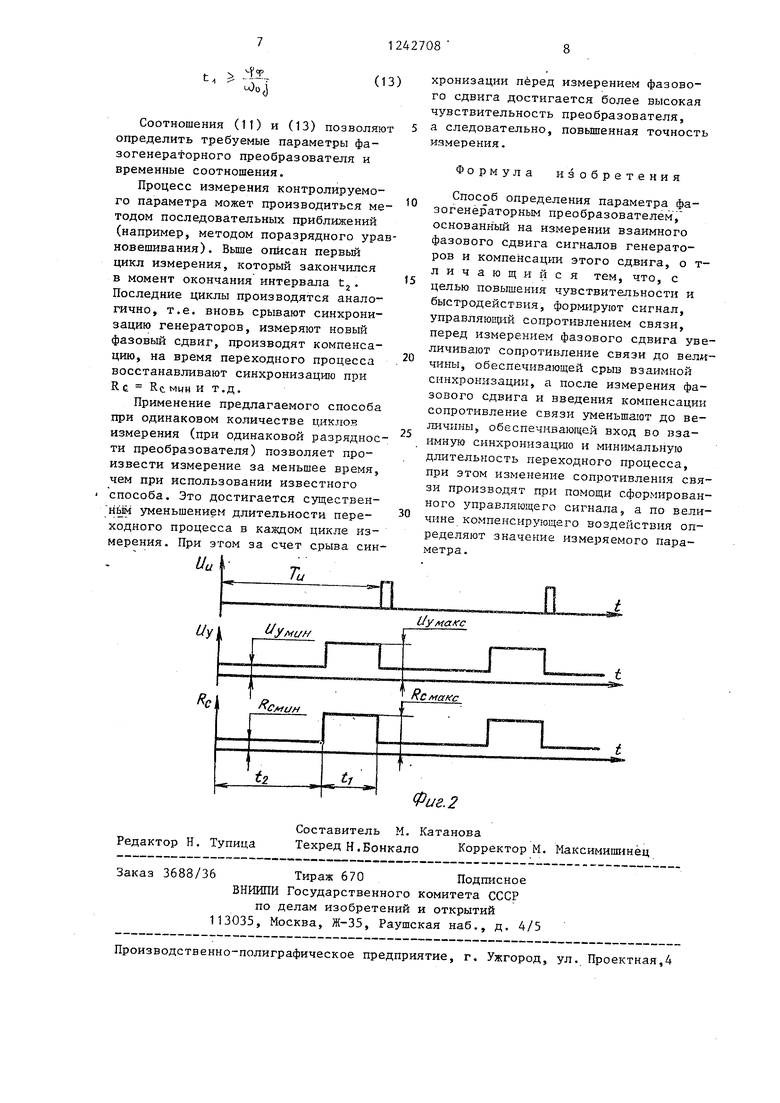
В блоке 7 управления формируются сигналы UM и Uy с периодом следования Т(1 (фиг. 2), Сигнал Un иницииру ет измерение фазового сдвига, а Uv управляет величиной сопротивления связи в блоке 5. Период измерения Тц состоит из двух временных интервалов tv и tj. В течение интервала t под действием сигнала сопротивление связи в бло.ке 5 прини- мает значение Ко, Rс МАКС при котором происходит срыв синхронизации генераторов.
Рассмотрим процессы, происходящие в преобразователе на интервале t. После срыва синхронизации генераторы начинают работать на собственных частотах ч) и и;, о - частота ге- нератора 2 после внесения расстройки датчиком 1), что приводит к росту фазового сдвига между их выходными сигналами
H(t) н + С +COU -0)4t TM + f )
где У (t) - текущее значение фазового сдвига
д lO иО 2 - uJ/i t - текущее значение времени, отсчитьтаемое на интерва- . ле t-tДлительность интервала t является важным параметром, во многом определяющим чувствительность преобразователя. Сформулируем требования к длительности t/, .
Фазовый сдвиг f (t) увеличивается пропорционально времени t, и, следовательно, при самой малой внесенной в генератор 2 расстройке (при малом Аи)) выполняется условие
Lp(t) f cpj
(4)
при котором срабатывает фазовый измеритель 6, а следовательно, будет произведено измерение контролируемого параметра объекта.
Таким образом, предлагаемый способ позволяет получить максимально возможную чувствительность преобразователя .
Из выражений (3) и (4) определяют требуемое значение длительности интервала
р .р ,
w)e
Г
(5)
-35ц 4045
е 50
55
дьО
V дьи
где J -у - относительная расстройка генератора 2. После измерения фазового сдвига в генераторе 4 производят такую подстройку, чтобы скомпенсировать фазовый сдвиг, вызванный расстройкой генератора 2, и восстанавливают синхронизацию генераторов путем уменьшения сопротивления связи в блоке 5 до величины Re Rt глчн. .
Б преобразователе эти операции выполняются следующим образом. При
срабатывании фазового измерителя 6 блок 7 управления вырабатывает сигнал, который посредством блока 3 производит подстройку генератора 4. Подстройка может производиться, например, подключением или отключением
(в зависимости от величины и знака фазового сдвига) конденсаторов в частотозадающем контуре генератора. Одновременно с этим блок 7 управления выдает сигнал Us мни (фиг. 2) в
iблок 5 связи, под действием которого сопротивление связи уменьшается до
Re RcMWHi,B качестве переменного сопротивления в блоке 5 связи можно использовать, например, полевые транзисторы. С этого момента восста- навливается синхронизация генераторов и начинается переходный процесс, заканчивающийся установлением новых значений частоты и фазового сдвига. Длительность этого процесса в основ- ном определяет быстродействие преобразователя и зависит от степени связи генераторов, т.е. от величины со- противления связи в блоке 5.
Скорость изменения фазы во время переходного процесса описывается выражением
d aQa)coi,) .dt иТ ()(к -cwVO «(t-)(K-p)
-ic.t, a(t) е
9э
9с
М.
кэ
и fic начальное и конеЗДое значения сдвига фазы-,
9э(Кэ), 9с(RC) - эквивалентная проводимость (сопротивление) контура генератора и проводимость (сопротив- ление) связи соответственно;
-- - постоянные времени 9э
г
тура,,тенератора
. ; К 1-31п4 к з1пЦ к. В. математическом смысле переходd А ный процесс закончен, если -j - и,
что выполняется при
(t)cos2fK (sinfK-sinfH)0, (7)
Обозначив А (siпfк-siп Pк) и подставив в выражение (7) a(t), получаем
tcosfit. Hi:
2А.е
(8)
Решив выражение (8) относительно t, нетрудно убедиться, что t
На практике переходный процесс можно считать законченным, если разность между установившимся значением и текущим значением, отнесенная к начальному значению, составит 0,01
(1%).
При наложенном условии выражение
(8) принимает вид
it сдг f;
пТ
.0,01 А ,
(9)
5 Ю .
15
2°
25
30
5
0
5
0
55
Из выражения (9) следует, что длительность переходного процесса
0, 4,6пЯГ .(10)
Фазогенераторный преобразователь работает в режиме компенсации при фазовом сдвиге,, близком к нулю, сле- доват(гльно . Учитывая последнее и подставляя в выражение (10). значение п,получаем
tnn ; 6 9 Rc.(ll)
Как видно из выражения (11), чем меньше сопротивление Re., тем меньше длительность переходного процесса и вьше быстродействие преобразователя. При RC.- О быстродействие преобразователя приближается к максимально возможному.
Рассмотрим формулу (5) и упростим ее. В числителе (5) приведены составляющие фазового сдвига fн (начальный сдвиг, вызванный неточностью начальной настройки генераторов) и fp (сдвиг, вызванный расстройкой генератора 2 датчиком 1). Величина м+ fp зависит от расстройки генераторов и от величины сопротивления связи RC.
Установившееся значение фазового сдвига
- arcsinbo J Ln arcsin ---- (12)
К
Из выражения (12) видно, что сумма iH представляющая собой фазовый сдвиг в конце интервала времени tjjT.e. после окончания переходного процесса,, который протекал при Rt- RCMUH составит малую величину.
При использовании предлагаемого способа в преобразователе можно более точно произвести Начальную настройку генераторов, т.е. обеспечить значительно меньшее значение f н.
Таким образом, исключение из формулы (5) суммы Ц- н+fp мало повлияет на величину t, и не изменит характера неравенства (5). С принятыми допущениями определение необходимой длительности интервала t можно производить по формуле
VT
A)OJ
Соотношения (11) и (13) позволяют определить требуемые параметры фа- зогенераторного преобразователя и временные соотношения.
Процесс измерения контролируемого параметра может производиться ме тодом последовательных приближений (например, методом поразрядного уравновешивания). Выше описан первый цикл измерения, который закончился в момент окончания интервала tj. Последние циклы производятся аналогично, т.е. вновь срывают синхронизацию генераторов, измеряют новый фазовьЕй сдвиг, производят компенсацию, на время переходного процесса восстанавливают синхронизацию при RG RC мин и т.д.
Применение предлагаемого способа при одинаковом количестве циклов измерения (при одинаковой разрядности преобразователя) позволяет произвести измерение за меньшее время, чем при использовании известного способа. Это достигается существен- HbiM уменьшением длительности переходного процесса в каждом цикле измерения. При этом за счет срыва син- и и
Редактор Н. Тупица
Составитель М. Катанова
Техред Н.Бонкало Корректор М. Максимишинёц
Заказ 3688/36 Тираж 670Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
)
10
15
20
25
30
хронизации перед измерением фазового сдвига достигается более высокая чувствительность преобразователя, а следовательно, повьшгенная точность измерения.
Формула изобретения
Способ определения параметра фа- зогенёраторным преобразователем , основанньй на измерении взаимного фазового сдвига сигналов генераторов и компенсации этого сдвига, о т- личающийся тем, что, с целью повышения чувствительности и быстродействия, формируют сигнал, управляюпр й сопротивлением связи, перед измерением фазового сдвига увеличивают сопротивление связи до величины, обеспечивающей срыв взаимной синхронизации, а после измерения фазового сдвига и введения компенсации сопротивление связи уменьшают до величины, обеспечивающей вход во взаимную синхронизацию и минимальную длительность переходного процесса, при этом изменение сопротивления связи производят при помощи сформированного управляющего сигнала, а по величине компенсирующего воздействия определяют значение измеряемого параметра.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОГЕНЕРАТОРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2198382C2 |
| Фазогенераторное измерительное устройство | 1986 |
|
SU1392341A1 |
| ФАЗОГЕНЕРАТОРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2199090C1 |
| Устройство для измерения неэлектрических величин | 1987 |
|
SU1490448A1 |
| Фазогенераторное измерительное устройство | 1985 |
|
SU1339391A1 |
| Фазогенераторный измеритель магнитной восприимчивости | 1986 |
|
SU1420564A1 |
| СПОСОБ ИЗМЕРЕНИЯ НОМИНАЛЬНОЙ ЧАСТОТЫ СИНУСОИДАЛЬНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2503019C1 |
| Преобразователь азимута | 1988 |
|
SU1609987A1 |
| Устройство для измерения малых девиаций частоты | 1977 |
|
SU661387A1 |
| ФАЗОГЕНЕРАТОРНЫЙ ДАТЧИК КОНТРОЛЯ ФЕРРИТОВЫХ ОБЪЕКТОВ | 2020 |
|
RU2781802C2 |
Изобретение относится к измерению электрических и неэлектрических величин, которые можно преобразовать при помощи индуктивных или емкостных датчиков. Цель изобретения - повьшение чувствительности и быстродействия фазогенераторного преобразователя. Взаимную синхронизацию генераторов 2 и 4 обеспечивают управляемым сопротивлением блока 5. При этом фазовый сдвиг между выходными сигналами генераторов близок или равен нулю. Посредством датчика 1 выводят расстройку генератора 2, а за счет увеличения сопротивления связи до величины Re RcMQKC срывают взаимную синхронизацию генераторов и спустя время . ti производят измерение фазового сдвига между сигналами генераторов 2 и 4. По результату измерения при помощи блока 3 подстраивает генератор 4 так, чтобы скомпенсировать фазовьй сдвиг, и, уменьшая сопротивление связи до величины Re, RCMHH восстанавливают синхронизацию генераторов. О величине контролируемого или измеряемого датчиком 1 параметра объекта судят.по величине компенсирующей подстройки в генераторе 4. Использование способа позволяет произвести измерения за меньшее время за счет уменьшения времени переходного процесса в каждом цикле измерения. При этом за счет срыва синхронизации перед измерением фазового сдвига достигается более высокая чувствительность преобразователя. 2 ил. 1 (Л 1чЭ 4 to О 00 фиг.1
| 1972 |
|
SU410202A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Полулях Н.С | |||
| Резонансные методы измерений | |||
| М.: Энергия, 1980, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
