1
Изобретение относится к промысловой геофизике и может быть использовано в инклинометрах для определения магнитного азимута.
Цель изобретения - повышение точности за счет исключения влияния на результат измерения азимута разности фаз между сигналами феррозондов и сигналом генератора.
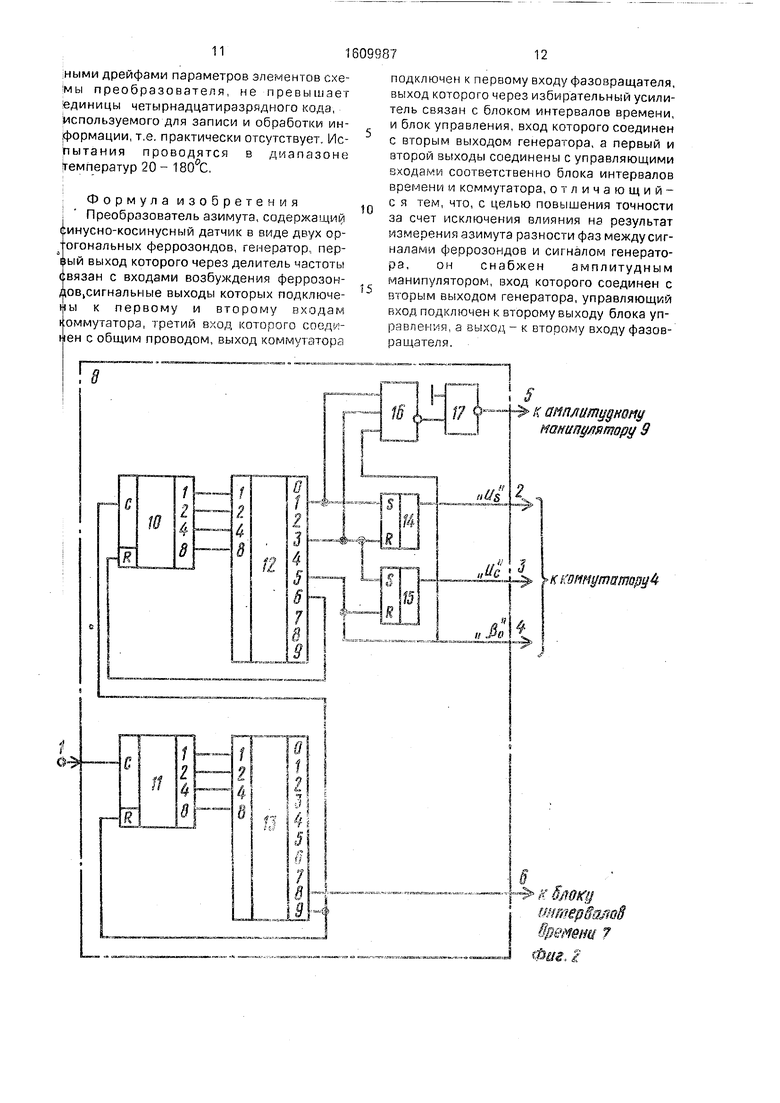
На фиг. 1 представлена структурная схема преобразователя азимута; на фиг.2 - блок управления; на фиг.З - блок интервалов времени; на фиг.4 - амплитудный манипулятор.
Преобразователь азимута содержит си- нусно-косинусный датчик 1 в виде двух ортогональных феррозондов (1 - 1) и (1 - 2), генератор 2, первый выход которого через делитель 3 частоты связан с входами возбуждения феррозондов. Сигнальные выходы последних подключены к первому и второму входам коммутатора 4, т ретий вход которого соединен с общим проводом схемы. Выход коммутатора 4 подключен к первому входу RC-фазовращателя 5,. выход которого через избирательный усилитель 6 связан с блоком 7 интервалов времени. Преобразователь азимута содержит также блок 8 уп равления, вхбд которого соединен с вторым входом генератора 2, а первый и второй выходы соединены с управляющими входами соответственно блока 7 инте рвалов времени и коммутатора 4, Кроме того, в состав преобразователя азимута входит амплитудный манипулятр 9, вход которого соединен с вторым выходом генератора 2, управляющий вход подключен к второму выходу блока 8 управления, а выход - к второму входу фазовращателя 5.
Блок 8 управления (фиг.2) состоит из двух счетчиков 10 и 11, двух дешифраторов 12 и 13, двух RC-триггеров 14 и 15 и логических элементов 16 и 17.
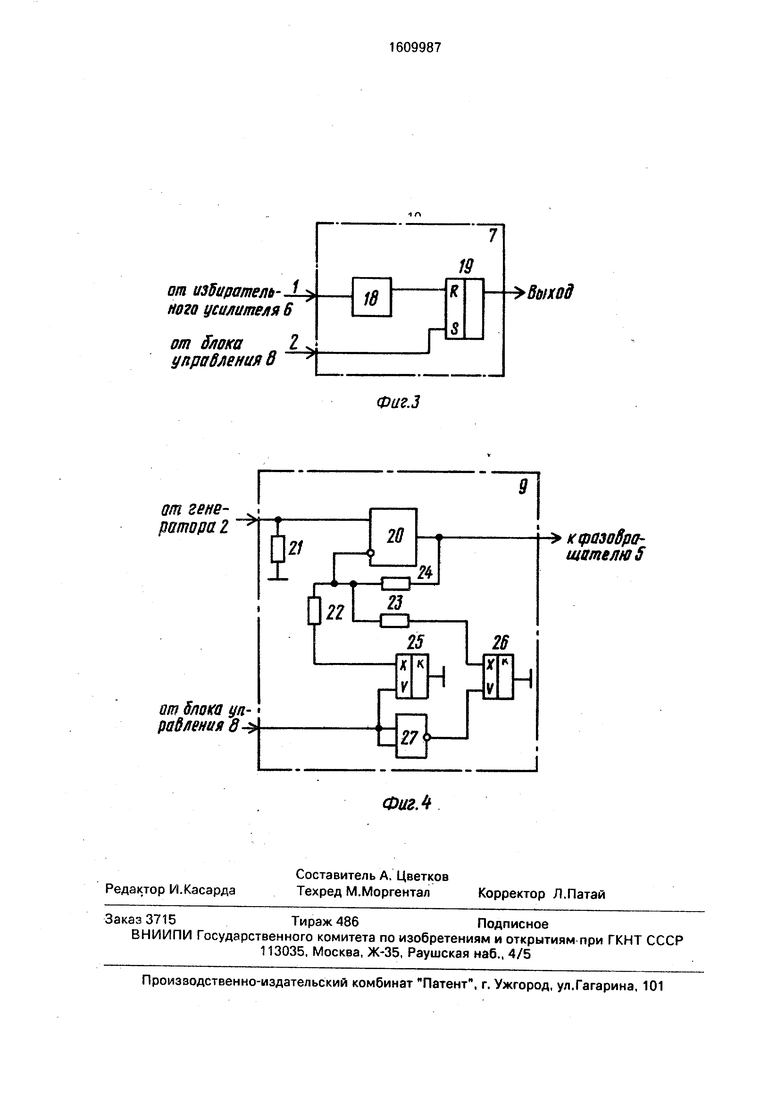
Блок 7 интервалов времени (фиг.З) содержит два элемента - компаратор 18 и RC-триггера 19,
.Амплитудный манипулятор 9 (фиг.4) представляет собой усилитель с изменяемым коэффициентом передачи. Он содержит операционный усилитель 20, резисторы 21 - 24, два аналоговых ключа 25 и 26 и логический элемент И-НЕ 27,
Рассмотрим работу RC-фазовращателя 5 (фиг.1), один вход которого с помощью коммутатора 4 последовательно подключается к сигнальным обмоткам синусно-косинусного датчика и к общему проводу схемы.а на втором вход подается опорный сигнал.
10
0
Представим сигналы синусно-косинусного датчика и опорный сигнал в виде
Us UsmSin( +ip, Uc UcmSln(ftJt+ (p), Uo Uom sin ft) t,/ 4
где Usm, Ucm, Uom амплитуды сигналов;
(D - частота сигналов;
(f - фазовый сдвиг, вносимый цепями возбуждения синусно-косинусного датчика.
Фазы сигналов Us и Uc равны между собой с достаточно высокой степенью точности, что практически просто достигается разгрузкой сигнальных обмоток датчика. Фаза опорного сигнала принята равной нулю, так как относительно опорного сигнала формируется временной интервал на выходе преобразователя.
Фаза сигнала на выходе RC-фазовращателя при последовательной работе ключей коммутатора принимает значения
25
д Uom к + Usm ( 51П(;о) Uom Usm ( CG5 (р + К
РС arctg К 4- Ucm ( К cos - sin ф }
Uom K- - Ucm ( COS + К sin tp)
PO arctg 1 / К
.(2)
35
0
5
где К wRC,
R и С- параметры элементов RC-фазовращателя.
На основании этого проанализируем работу устройства-прототипа. Допустим, что в его схеме действуют сигналы вида (1) и примем во внимание равенства Usm Um
Ucm UmCOS1/) ,
где Urn - максимальный размах сигналов синусно-косинусного датчика, а тр угол поворота чувствительного элемента датчика. Тогда искомый угол определится по формуле
tg (
V n arctg
tg ((
(3)
или с учетом ( 2 )
V%-arctg P-Jfei l - 2f
Uom К - Urn sin ф
- X
0 „ Uom Urn COS sin (f) Um COS ip cOS
(4)
Его значение отличается от истинного значения вследствие наличия сдвига фаз р . Следовательно, устройство-прототип имеет погрешность, обусловленную фазовым сдвигом между сигналами датчика и опорным сигналом. Эта погрешность имеет вид
А , 0,25 sin 2 т/ sin 2 «7 (-cost/ + sin t/ )/г-ч
arctg ---- - - (5)
М2П1К cosy - 0,25 sin 2 sin 2 (cos ip + sin V)
Urn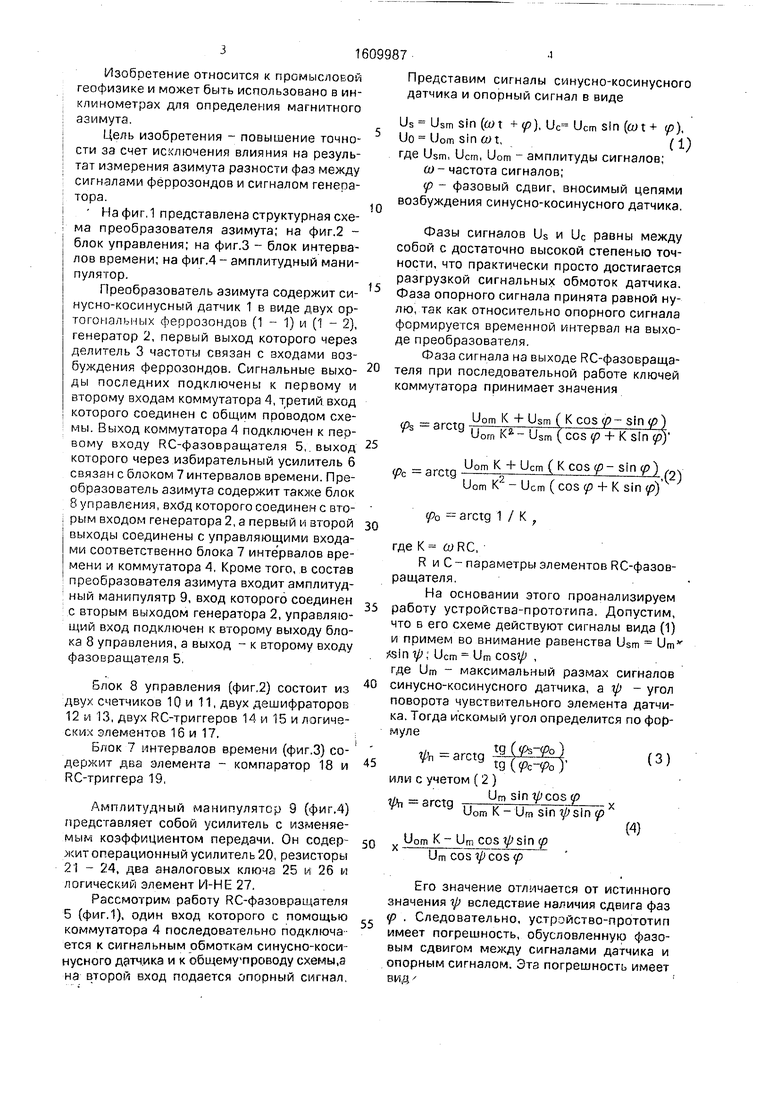
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь азимута | 1988 |
|
SU1615347A1 |
| Преобразователь азимута инклинометра | 1990 |
|
SU1760324A1 |
| Преобразователь азимута | 1980 |
|
SU947408A1 |
| Устройство для определения углов искривления скважины | 1982 |
|
SU1139835A1 |
| Преобразователь азимута инклинометра | 1990 |
|
SU1763644A1 |
| Феррозондовый преобразователь азимута | 1981 |
|
SU956773A1 |
| Феррозондовый датчик азимута | 1982 |
|
SU1121407A1 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |
| Преобразователь азимута | 1987 |
|
SU1452953A1 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
Изобретение относится к промысловой геофизике и предназначено для определения магнитного азимута. Цель - повышение точности за счет исключения влияния на результат измерения азимута разности фаз между сигналами феррозондов (Ф) и сигналом генератора (Г). Преобразователь азимута содержит синусно-косинусный датчик 1 в виде двух ортогональных Ф(1-1) и (1-2), с входами возбуждения которых через делитель 3 частоты связан первый вход Г 2. Сигнальные выходы Ф подключены к первому и второму входам коммутатора (К) 4, третий вход которого соединен с общим проводом. Выход К 4 подключен к первому входу фазовращателя 5, выход которого через избирательный усилитель 6 связан с блоком 7 интервалов времени. С вторым выходом Г 2 соединен вход блока 8 управления, первый и второй выходы которого соединены с управляющими входами соответственно блока 7 и К 4. С вторым выходом Г 2 соединен вход амплитудного манипулятора 9. Управляющий вход манипулятора 9 подключен к второму выходу блока 8, а выход - к второму входу фазовращателя 5. Сигнальные выходы Ф и общий провод схемы К 4 последовательно подключают к первому входу фазовращателя 5 при двух значениях амплитуды опорного сигнала с манипулятора 9. В блоке 7 разность фаз сигнала усилителя 6 и управляющего сигнала, синфазного с сигналом Г 2, преобразуется в пропорциональную длительность импульсов, которую измеряют и определяют азимут по соответствующему алгоритму. 4 ил.
ИЛИ при малых углах (в пределах О - )
AV 0,5 K8ln2V(-cosV + slnV)cos4oA«.(6)
Um
Закон изменения погрешности достаточно сложен и зависит от отношения амплитуд сигналов датчиков и опорного сигнала, от расстройки RC-фазовращателя (К 1), а также от величины самого измеряемого угла, причем указанные параметры существенно зависят от температуры. Указанную погрешность скомпенсировать весьма сложно, что составляет существенный недостаток прототипа.
Таким образом, низкая точность прото- типа обусловлена существованием сдвига фаз между сигналами датчика и опорным сигналом генератора, от которого возбуждается датчик.
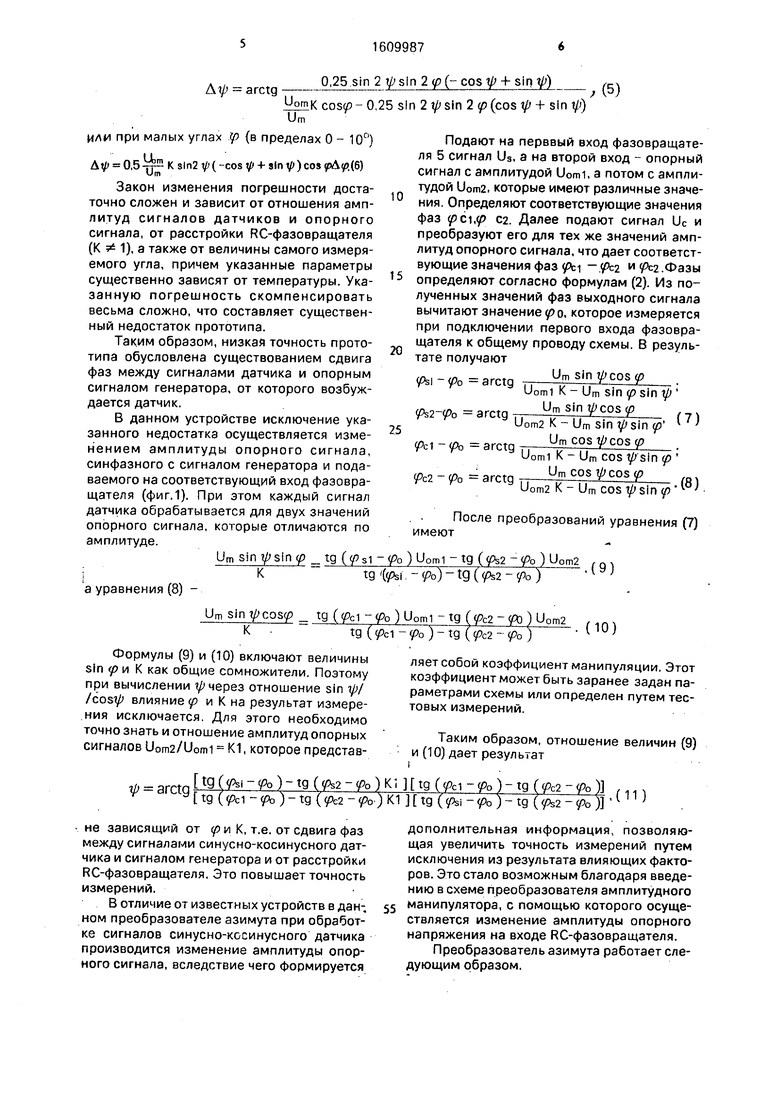
В данном устройстве исключение указанного недостатка осуществляется изменением амплитуды опорного сигнала, синфазного с сигналом генератора и подаваемого на соответствующий вход фазовращателя (фиг.1). При этом каждый сигнал датчика обрабатывается для двух значений опорного сигнала, которые отличаются по амплитуде.
Urn sin t/;sln (р д(р5
а уравнения (8)
UmSinV COS p tg ()Uom1-tg(|y7c2- A))Uom2
tg (99ci - o ) - tg ((pc2 - PO )
Формулы (9) и (10) включают величины sin и К как общие сомножители. Поэтому при вычислении через отношение sin t/J/ /cosV влияние у) и К на результат измерения исключается. Для этого необходимо точно знать и отношение амплитуд опорных сигналов Uom2/Uomi К1, которое представ-
ф arctq tg ( У ) 9 ( - (ро )К1 tg(i-V5o)-tg()K
не зависящий от f и К, т.е. от сдвига фаз между сигналами синусно-косинусного датчика и сигналом генератора и от расстройки RC-фазовращателя. Это повышает точность измерений.
В отличие от известных устройств в дан-, ном преобразователе азимута при обработке сигналов синусно-косинусного датчика производится изменение амплитуды опорого сигнала, вследствие чего Формируется
0
5
„
5
Подают на перввый вход фазовращателя 5 сигнал Us, а на второй вход - опорный сигнал с амплитудой Uomi, а потом с амплитудой Uom2, которые имеют различные значения. Определяют соответствующие значения фаз (pc,p 02. Далее подают сигнал Uc и преобразуют его для тех же значений амплитуд опорного сигнала, что дает соответствующие значения фаз i и .Фазы определяют согласно формулам (2). Из полученных значений фаз выходного сигнала вычитают значение 0, которое измеряется при подключении первого входа фазовращателя к общему проводу схемы. В результате получают
|- o arctg ..Uomi К-Urn /)
yv.-y, оггтр , . C°S (р
Uom2 K-UmSin Sin
- УЪ arctg °f ° Р
Uomi К - Urn COS Sin (р
рс2 - (Ро arctg Urn cos cos
Uom2 K-UmCOS Siny
имеют
После преобразований уравнения (7)
Uomi - tg ( - РО} Uom2
I uiiii a V r J - om ( Q ) PO} - tg ((ps2 - po )
(10)
ляет собой коэффициент манипуляции. Этот коэффициент может быть заранее задан параметрами схемы или определен путем тестовых измерений.
Таким образом, отношение величин (9) и (10) дает результат
tg ((pc )-ig( ) , . tg(y5si-9%)-tg(2-fb)
дополнительная информация, позволяющая увеличить точность измерений путем исключения из результата влияющих факторов. Это стало возможным благодаря введению в схеме преобразователя амплитудного 5 манипулятора, с помощью которого осуществляется изменение амплитуды опорного напряжения на входе RC-фазовращателя.
Преобразователь азимута работает следующим образом.
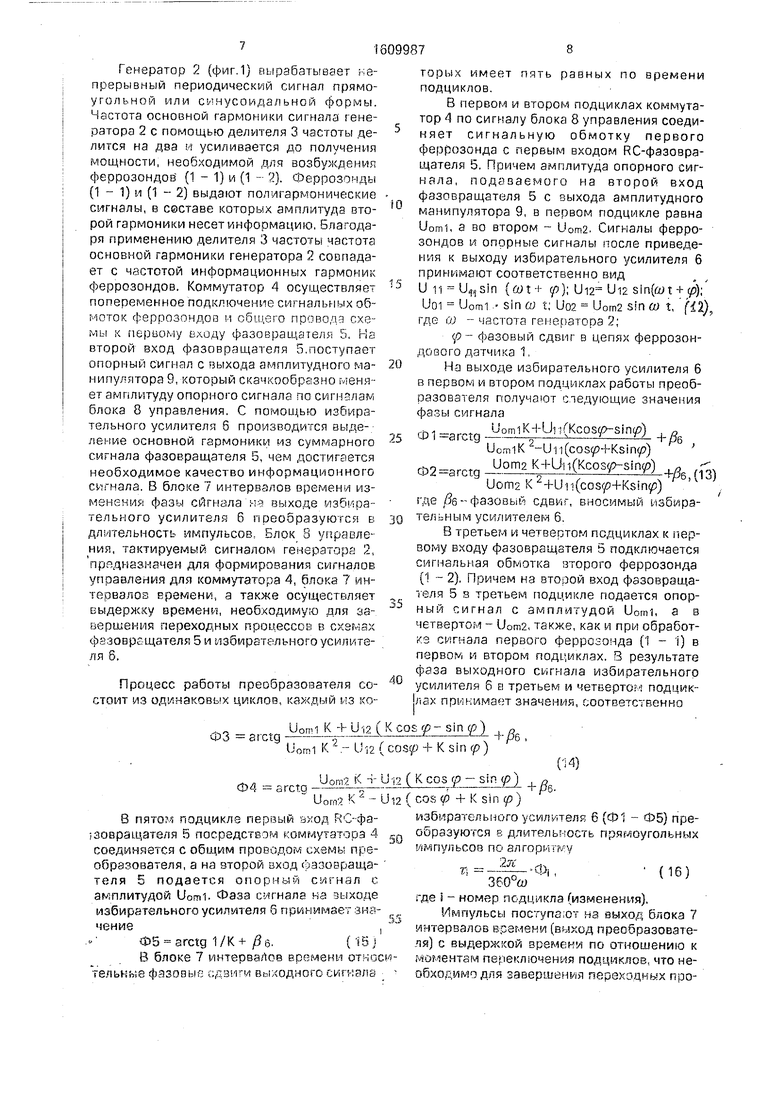
Генератор 2 (фиг.1) вырабатывает непрерывный периодический сигнал прямоугольной или синусоидальной формы. Частота основной гармоники сигнала генератора 2 с помощью делителя 3 частоты делится на два и усиливается до получения мощности, необходимой для возбуждения феррозондов (1 - 1) и (1 - 2). Феррозондь (1 - 1) и (1 - 2) выдают полигармонические С11гналы, в составе которых амплитуда второй гармоники несет информацию, Благодаря применению делителя 3 частоты частота основной гармоники генератора 2 совпадает с частотой информационных гармоник феррозондов. Коммутатор 4 осуществляет попеременное подключение сигнальных обмоток феррозондов и общего провода схемы к первому входу фазовращателя 5. Hs второй вход фазовращателя 5.поступает опорный сигнал с выхода амплитудного манипулятора 9, который скачкообразно пленяет амплитуду опорного сигнала по сигналам блока 8 управления. С погмощью избирательного усилителя б производится выделение основной гармоники из сумрларного сигнала фазовращателя 5, чем достигается необходим-ое качество информационного сигнала. В блоке интервалов времени изменения фазы сигнала на выходе избирательного усилителя 6 преобразуются в длительность ьчмпульсов, Блок 8 управления, тактируемый сигналом генератора 2, предназначен для формирования сигналов управления для коммутатора 4, блока 7 интервалов времени, а также осуществляет выдержку времени, необходимую для завершения переходных процессов в схемах фэзовращателй 5 и ,1збирательного усилителя 6.
Процесс работы преобразователя состоит из од|/ наковых циклов, из коФЗ ar-ctg ll-iiJ : l: ll Pi liil ,
Uomi К -.- U12 ( + К Sirs (р )
Uom2 К -i- и 12 ( - Sin ) n
Uom3 К - и 12 ( COS + К Sin 99 )
Ф4 arctq
i Vf JO у ) (Ч СЭ I I 1 1 J
8 ПЯТО. подцикле пер1зый вход RC-фа- 3овращателя 5 посредством коммутатора 4 Q соединяется с общим проводом схемы преобразователя, а на второй вход фазовраща- теля 5 подается опорный сигнал с амплитудой Uomi. Фаза сигнала на зыходе избирательного усил лтеля б пр1/ нимает значениеIФ5 агсгд 1/К-н 6. (Ш В блоке 7 интервалов времени относительные фазовые сдвиги вь ходногс сиг -;зла 0
0
5
0
торых имеет пять равных по времени подциклов.
В первом и втором подциклах коммутатор 4 по сигналу блока 8 управления соединяет сигнальную обмотку первого феррозонда с первым входом RC-фазовра- щателя 5. Причем амплитуда опорного сигнала, подаваемого на второй вход фазовращателя 5 с выхода амплитудного манипулятора 9, в первом подцикле равна Uomi, а во втором - Uom2. Сигналы феррозондов и опорные сигналы после приведения к выходу избирательного усилителя б принимают соответственно вид и 11 U,,sin (0)1+ р Ui2 Ui2 sin((yt+ )Г
Uoi Uomi .- sin 0) t; Uo2 Uom2 Sfn Ш t, ,,
где 0) - частота генератора 2;
p - фазовый сдвиг в цепях феррозон- дозого датчика 1,
На выходе избирательного усилителя б в первом и втором подциклах работы преобразователя получают следующие значения фазы сигнала Ф1 -arctg (
UomlK -Uii(cos 4-Ksinv)
02 arctg-.ni24i j(fc°sy smy.) . Uom2 К 4Uii(cos +Ksin) где /Зб фазовый сдвиг, вносимый тельным усилителем 6.
В третьем и четвертом подциклах к tiep- вому входу фазовращателя 5 подключается сигнальная обмотка второго феррозонда (1 - 2). Причем на второй вход фазовращателя 5 в третьем подцикле подается опорный сигнал с амплитудой Uomi, а в четвертом - Uom2, также, как и при обработ- кэ сигнала первого феррозонда (1 - 1) в первом и втором подциклах. В результате фаза выходного сигнала избирательного усилителя 6 Е1 третьем м четвертом подцик- |лах принимает значения, соответственно
( COS + К Sin 99 )
i Vf JO у ) (Ч СЭ I I 1 1 J
избирательного усилителя б (Ф1 - Ф5) преобразуются 8 длительность прямоугольных s/if inyfibCOB по алгорит /у
2л,
Oi ,
(16)
где i - номер подцикла (изменения).
Импульсы поступают на выход блока 7 интервалов времени (выход преобразователя) с выдержкой времени по отношению к jviuMeHTaM переключения подць1клов, что необходимо для завершения переходных про цессов в схемах фазовращателя 5 и избирательного усилителя 6. После измерения длительностей импульсов и обработки
МД tg(01 -Ф5)-тд(Ф2-Ф5)К1 tg(03-05)-tg(04-05)l
Ui2 tg ( ФЗ - 05 ) - tg ( Ф4 - Ф5 ) К1 tg ( Ф1 - Ф5 ) -tg ( Ф2-Ф5
представляющее собой тангенс искомого угла. Но так как оси чувствительности фер-. розондов ортогональны и с помощью, например подвижных рамок, с грузами устанавливаются в горизонтальную плоскость, то амплитуды вторых информационных гармоник изменяются по законам
Uii Um sin а, Ui2 UmCosa , (1Ю, где ее - магнитный азимут.
Отношение (17) определяет азимут
a arctg .(19)
Конечный результат измерения не зависит от расстройки фазовращателя и от относительного фазового сдвига сигналов феррозондов. Кроме того, результат не зависит от собственного фазового сдвига Зе избирательного усилителя, благодаря вычислению разностей Ф1 - Ф5, Ф2 - Ф5, ФЗ - Ф5, Ф4 - Ф5.
Функциональные блоки преобразователя азимута работают следующим образом.
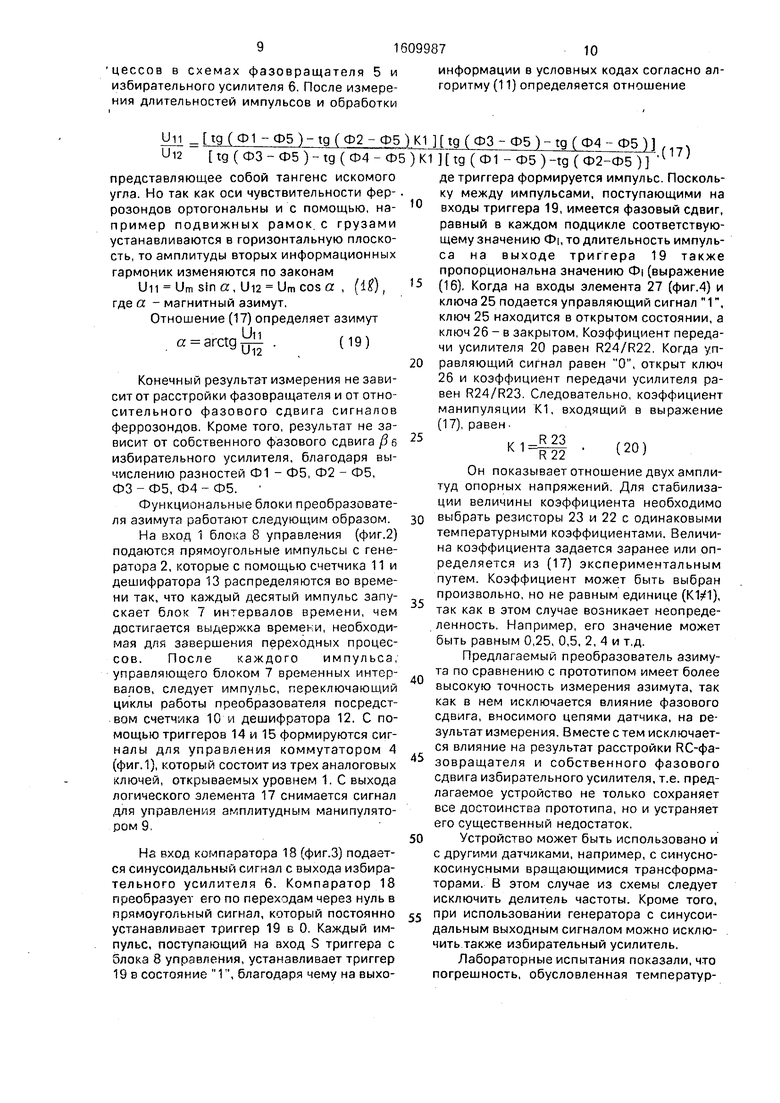
На вход 1 блока 8 управления (фиг.2) подаются прямоугольные импульсы с генератора 2, которые с помощью счетчика 11 и дешифратора 13 распределяются во времени так, что каждый десятый импульс запускает блок 7 интервалов времени, чем достигается выдержка времени, необходимая для завершения переходных процессов. После каждого импульса, управляющего блоком 7 временных интервалов, следует импульс, переключающий циклы работы преобразователя посредством счетчика 10 и дешифратора 12. С помощью триггеров 14 и 15 формируются сигналы для управления коммутатором 4 (фиг. 1), который состоит из трех аналоговых ключей, открываемых уровнем 1. С выхода логического элемента 17 снимается сигнал ,У1я управления амплитудным манипулятором 9.
На вход компаратора 18 (фиг.З) подается синусоидальный сигнал с выхода избира- тельного усилителя 6. Компаратор 18 преобразует его по переходам через нуль в прямоугольный сигнал, который постоянно устанавливает триггер 19 в О, Каждый импульс, поступающий на вход S триггера с блока 8 управления, устанавливает триггер 19 в состояние V, благодаря чему на выхо10
15
20
25
30
35
40
45
50
55
де триггера формируется импульс. Поск ку между импульсами, поступающими входы триггера 19, имеется фазовый сд равный в каждом подцикле соответст щему значению Ф|, то длительность имп са на выходе триггера 19 та пропорциональна значению Ф| (выраже (16). Когда на входы злемента 27 (фиг ключа 25 подается управляющий сигнал ключ 25 находится в открытом состояни ключ 26 - в закрытом. Коэффициент пер чи усилителя 20 равен R24/R22. Когда равляющий сигнал равен О, открыт к 26 и коэффициент передачи усилителя вен R24/R23. Следовательно, коэффици манипуляции К1, входящий в выраже (17), равен.
(20) Он показывает отношение двух ам туд опорных напряжений. Для стабил ции величины коэффициента необход выбрать резисторы 23 и 22 с одинаков температурными коэффициентами. Вел на коэффициента задается заранее или ределяется из (17) экспериментальн путем. Коэффициент может быть выб произвольно, но не равным единице (K так как в этом случае возникает неопре ленность. Например, его значение мо быть равным 0,25, 0,5, 2, 4 и т.д.
Предлагаемый преобразователь ази та по сравнению с прототипом имеет бо высокую точность измерения азимута, как в нем исключается влияние фазов сдвига, вносимого цепями датчика, на зультат измерения. Вместе с тем исключ ся влияние на результат расстройки RCзовращателя и собственного фазов сдвига избирательного усилителя, т.е. пр лагаемое устройство не только сохран все достоинства прототипа, но и устран его существенный недостаток.
Устройство может быть использован с другими датчиками, например, с синус косинусными вращающимися трансфор торами. В этом случае из схемы след исключить делитель частоты. Кроме то при использовании генератора с синус дальным выходным сигналом можно искл чить также избирательный усилитель.
Лабораторные испытания показали, погрешность, обусловленная температ
информации в условных кодах согласно алгоритму (11) определяется отношение
0
5
0
5
0
5
0
5
0
5
де триггера формируется импульс. Поскольку между импульсами, поступающими на входы триггера 19, имеется фазовый сдвиг, равный в каждом подцикле соответствующему значению Ф|, то длительность импульса на выходе триггера 19 также пропорциональна значению Ф| (выражение (16). Когда на входы злемента 27 (фиг.4) и ключа 25 подается управляющий сигнал 1, ключ 25 находится в открытом состоянии, а ключ 26 - в закрытом. Коэффициент передачи усилителя 20 равен R24/R22. Когда управляющий сигнал равен О, открыт ключ 26 и коэффициент передачи усилителя равен R24/R23. Следовательно, коэффициент манипуляции К1, входящий в выражение (17), равен.
(20) Он показывает отношение двух амплитуд опорных напряжений. Для стабилизации величины коэффициента необходимо выбрать резисторы 23 и 22 с одинаковыми температурными коэффициентами. Величина коэффициента задается заранее или определяется из (17) экспериментальным путем. Коэффициент может быть выбран произвольно, но не равным единице (KV1), так как в этом случае возникает неопределенность. Например, его значение может быть равным 0,25, 0,5, 2, 4 и т.д.
Предлагаемый преобразователь азимута по сравнению с прототипом имеет более высокую точность измерения азимута, так как в нем исключается влияние фазового сдвига, вносимого цепями датчика, на результат измерения. Вместе с тем исключается влияние на результат расстройки RCфа- зовращателя и собственного фазового сдвига избирательного усилителя, т.е. предлагаемое устройство не только сохраняет все достоинства прототипа, но и устраняет его существенный недостаток.
Устройство может быть использовано и с другими датчиками, например, с синусно- косинусными вращающимися трансформаторами. В этом случае из схемы следует исключить делитель частоты. Кроме того, при использовании генератора с синусоидальным выходным сигналом можно исключить также избирательный усилитель.
Лабораторные испытания показали, что погрешность, обусловленная температур:ными дрейфами параметров элементов схе- 1МЫ преобразователя, не превышает единицы четырнадцатиразрядного кода, Используемого для записи и обработки ин- |формации, т,е. практически отсутствует. Ис- рытания проводятся в диапазоне (температур 20 - 180,
: Формула изобретения
Преобразователь азимута, содержащий (;инусно-косинусный датчик в виде двух ор- огональных феррозондов, генератор, пер- 11ЫЙ выход которого через делитель частоты связан с входами возбуждения феррозон- дов,сигнальные выходы которых подключе- vfb к первому и второму входам ||оммутатора, третий вход которого соедк- Н1ен с общим проводом, выход коммутатора
0
подключен к первому входу фазовращателя, выход которого через избирательный усилитель связан с блоком интервалов времени, и блок управления, вход которого соединен с вторым выходом генератора, а первый и второй выходы соединены с управляющими входами соответственно блока интервалов времени и коммутатора, отличающий- с я тем, что, с целью повышения точности за счет исключения влияния на результат измерения азимута разности фаз между сигналами феррозондов и сигналом генератора, он снабжен амплитудным манипулятором, вход которого соединен с Езторым выходом генератора, управляющий вход подключен к второму выходу блока уп- равлен1 я, а выход- к второму входу фазовращателя.
К амплитудкопу манипе//1ятору 9
к оммутатвру4
Bmxoff
Фиг.З
кфазовра- щителаЗ
| Авторское свидетельство СССР N51008432 | |||
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Преобразователь азимута | 1987 |
|
SU1452953A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
