Изобретение относится к контрольно-измерительной технике и может быт использовано в приборостроении для контроля дефектов типа вьтколок, царапин, точек, остающихся на поверхности оптических деталей после их окончательной- обработки.
Цель изобретения - повышение производительности контроля дефектов поверхностей оптических деталей.
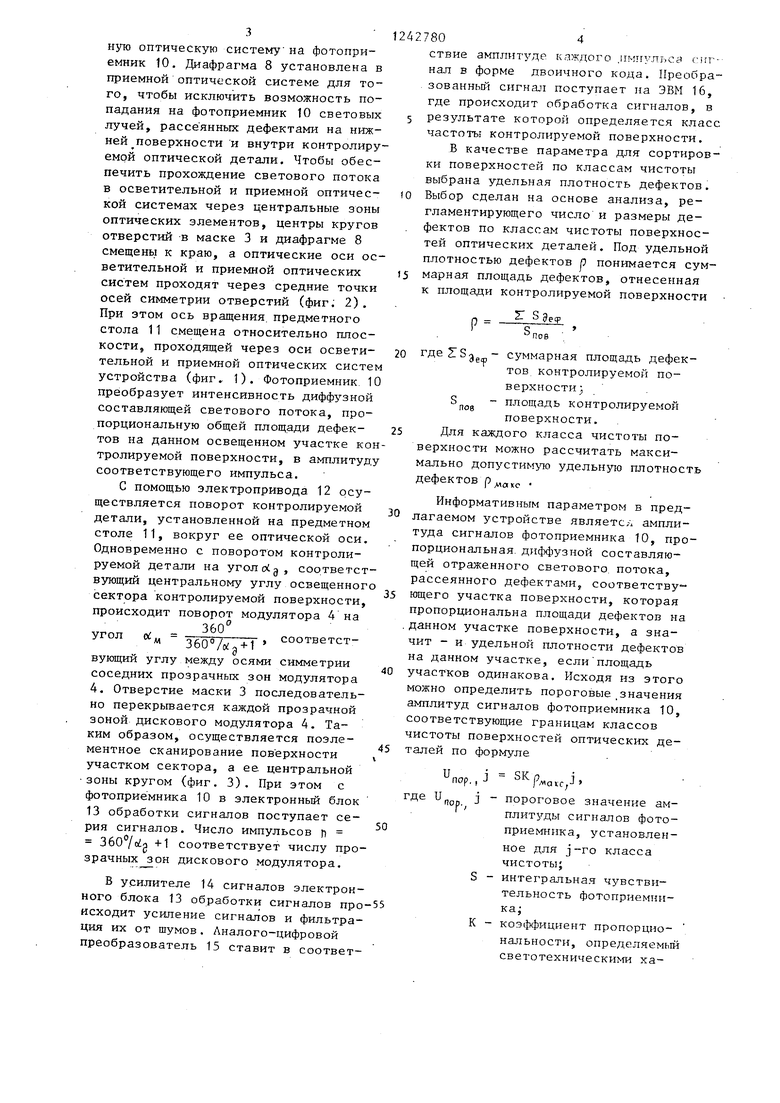
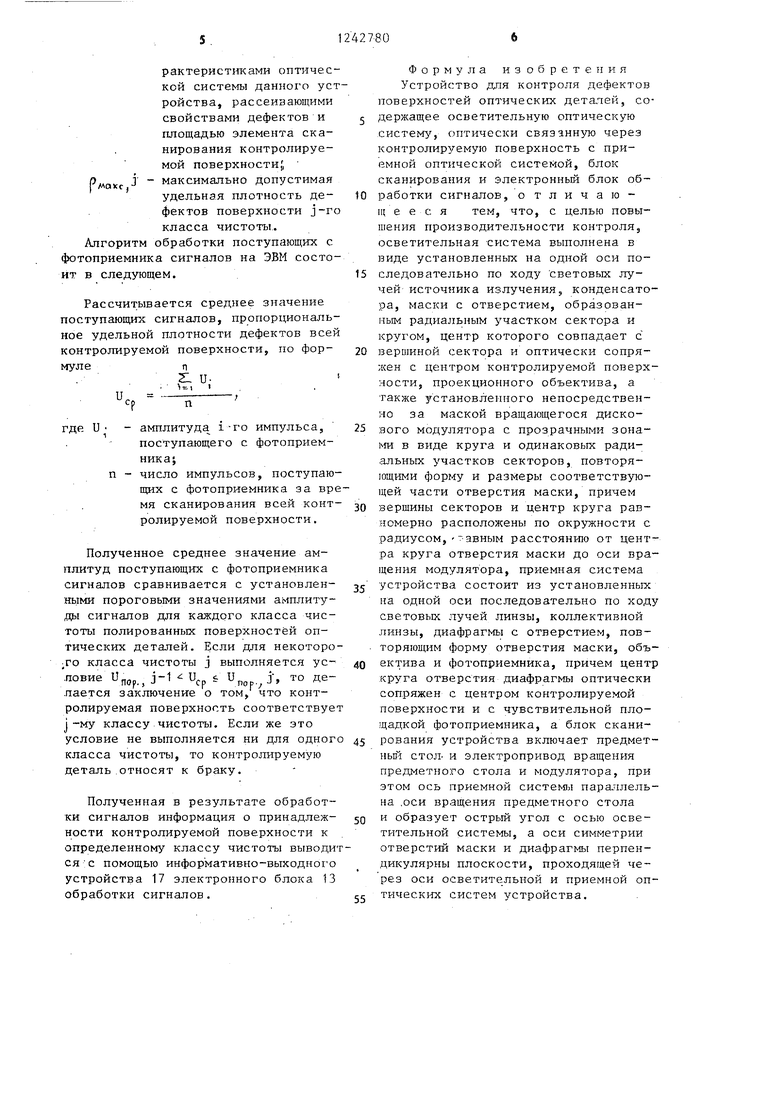
На фиг. 1 изображена принципиальная схема устройства для контроля дефектов поверхностей оптических деталей; на фиг. 2 - вид и взаимное расположение маски осветительной оптической системы устройства и дискового модулятораJ на фиг. 3 - схема сканирования контролируемой поверхности.
Устройство содержит осветитель- иую оптическую систему, приемную оптическую систему, блок сканирования и электронньш блок обработки сигналов.
Оптическая осветительная система состоит из установленных последовательно по ходу световр к лучей источника 1 излучения (фиг. 1),конденсора 2, маски 3, вращающегося дискового модулятора 4 и проекционного объектива. 5. Маска 3 представляет собой непрозрачный диск с отверстием в виде круга и сектора,причем центр круг совпадает с вершиной сектора. Форма отверстия маски напоминает замочную скважину. Непосредственно за маской 3 установлен-модулятор 4, который представляет собой непрозрачньй вращающийся диск с прозрачными зонами в виде круга и одинаковых радиальных участков секторов, повторяющими форму и размеры соответствующей части отверстия маски 3, причем вершины секторов и центр круга равномерно расположены по окружности с радиусом равным расстоянию от центра круга отверстия маски 3 до оси вращения модулятора (фиг. 2), Центр круга отверстия маски 3 оптически сопряжен с центром контролируемой поверхности (фиг. 1). Осью оптической осветительной системы является общая ось источника 1 излучения, конденсора 2, маски 3 и проекционного объектива 5.
Приемная оптическая система устройства состоит из установленных на одной оси последовательно по ходу
световых лучей линзы 6, коллективной линз-ы 7, диафрагмы 8, объектива 9 -и фотоприемника 10, Диафрагма 8 представляет собой непрозрачньй
диск с отверстием, повторяющим форму отверстия маски 3 осветительной оптической системы. Отверстие диафрагмы 8 оптически сопряжено с чуветви- тельной площадкой фотоприемника 10,
а центр.круга отверстия диафрагмы 8 оптически сопряжен с центром ролируемой поверхности.
Блок сканирования устройства состоит из предметного стола 11 для установки на нем контролируемой детали и электропривода 12, обеспечивающего вращение предметного стола 11 и дискового моду лятора 4 осветительной системы. При этом ось приемной оптической системы параллельна оси вращения предметного стола 11 и образует острый угол с осью осветительной оп- тической. системы. Оси симметрии отверстий маску 3 осветительной системы
и диафрагмы 8 приемной системы перпендикулярны плоскости, проходящей через оси осветительной и приемной оптически : систем устройства.
Электронный блок 13 .обработки сигналов состоит из усилителя 14 сигналов, аналого-цифрового преобразователя 15, ЭВМ 16 и информативно-выходного устройства 17. Выход фотоприемника 10 связан с входом усилителя 14
сигналов, выход усилителя 14 сигналов связан с входом аналого-цифрового преобразователя 15, выхо ц которого соединен с ЭВМ 16, которая связана с информативно-выходным устройством 17.
Устройстззо работает следующим образом.
С помош;ью источника 1 излучения, установленного в фокусе конденсора 2, освещается отверстие ма:ски 3. Часть отверстия маски 3 через соот- ,ветствующую прозрачную зону диска модулятора 4.проецируется объективом 5 на контролируемую поверхность детали, расположенной на предметном столе 11, в результате чего на поверхности контролируемой оптической детали освещается участок в виде части сектора или круга. Диффузная составляющая отрешенного светового потока, рассеянного дефектами на освещенном участке контролируемой поверхности, поступает через приемную оптическую систему на фотоприемник 10, Диафрагма 8 установлена в приемной оптической системе для того, чтобы исключить возможность попадания на фотоприемник 10 световых 5 лучей, рассеянных дефектами на нижней поверхности и внутри контролируемой оптической детали. Чтобы обеспечить прохождение светового потока в осветительной и приемной оптичес- (о кой системах через центральные зоны оптических элементов, центры кругов отверстий в маске 3 и диафрагме 8 смещены к краю, а оптические оси осветительной и приемной оптических 15 систем проходят через средние точки осей симметрии отверстий (фиг. 2). При этом ось вращения предметного стола 11 смещена относительно плоскости, проходящей через оси освети- 20 тельной и приемной оптических систем устройства (фиг . 1). Фотоприемник 10 преобразует интенсивность диффузной составляющей светового потока, пропорциональную общей площади дефек- 25 тов на данном освещенном участке контролируемой поверхности, в амплитуду соответствующего импульса.
С помощью электропривода 12 осуществляется поворот контролируемой зо детали, установленной на предметном столе 11, вокруг ее оптической оси. Одновременно с поворотом контролируемой детали на уголоСд, соответствующий центральному углу освещенного сектора контролируемой поверхности, происходит поворот модулятора 4 на
360 угол 360% +1 « оответствующий углу между осями симметрии соседних прозрачных зон модулятора 4. Отверстие маски 3 последовательно перекрывается каждой прозрачной зоной дискового модулятора 4. Таим образом, осуществляется поэлеентное сканирование поверхности частком сектора, а ее центральной зоны кругом (фиг. 3). При этом с отоприёмника 10 в электронный блок 13 обработки сигналов поступает сеия сигналов. Число импульсов п 360°/« 3 соответствует числу прорачных зон дискового модулятора.
В усилителе 14 сигналов электроного блока 13 обработки сигналов про-55 сходит усиление сигналов и фильтраия их от шумов. Аналого-цифровой реобразователь 15 ставит в соответ40
45
50
5 (о 15 20 25
о
0
5
ствие амплитуде каждого .импульса сигнал в форме двоичного кода. Преобра- зованный сигнал поступает на ЭВМ 16, где происходит обработка сигналов, в результате KOTopoii определяется класс частоть контролируемой поверхности.
В качестве параметра для сортировки поверхностей по классам чистоты выбрана удельная плотность дефектов. Выбор сделан на основе анализа, регламентирующего число и размеры дефектов по классам чистоты поверхностей оптических деталей. Под удельной плотностью дефектов р понимается суммарная площадь дефектов, отнесенная к площади контролируемой поверхности
п - ST S 9eip
Рс
пов
- суммарная площадь дефектов контролируемой поверхности}S - площадь контролируемой
поверхности.
Для каждого класса чистоты поверхности можно рассчитать максимально допустим то удельную плотность дефектов , .
Информативным параметром в предлагаемом устройстве являетсл амплитуда сигналов фотоприемника 10, пропорциональная, ди)фузной составляющей отраженного светового потока, рассеянного дефектами, соответству™ ющего участка поверхности, которая пропорциональна площади дефектов на данном участке поверхности, а значит - и удельной плотности дефектов на данном участке, если площадь участков одинакова. Исходя из этого можно определить пороговые .значения амплитуд сигналов фотоприемника 10, соответствующие границам классов чистоты поверхностей оптических деталей по
и
пор
.,J SK|7,,,j,
где Ujjp j - пороговое значение амплитуды сигналов фотоприемника, установленное для j-ro класса ЧИСТОТЫ5
S - интегральная чувствительность фотоприемни- ка
К - коэ(|к зициент пропорциональности, определяемый светотехническими хаМО ICC .
рактериСтиками оптической системы данного устройства, рассеивающими свойствами дефектов и площадью элемента сканирования контролируемой поверхности; J - максимально допустимая
удельная плотность де- фактов поверхности j-ro класса чистоты.
Алгоритм обработки поступающих с фотоприемника сигналов на ЭВМ состоит в следующем.
Рассчитывается среднее знгшение поступающих сигналов, пропорциональное удельной плотности дефектов всей контролируемой поверхности, по фор-
муле
п
ZL и.
W, I
п
где U - амплитуда 1-го импульса.
поступающего с фотоприемник а j
п - число импульсов, поступающих с фотоприемника за время сканирования всей конт- ролируемой поверхности.
Полученное среднее значение амплитуд поступающих с фотоприемника сигналов сравнивается с установлен- ными пороговыми значениями амплитуды сигналов для каждого класса чистоты полированных поверхностей оптических деталей. Если для некоторо- ;Го класса чистоты j выполняется ус- ловие Uno j-1 и,р с и„ j, то делается заключение о том, что контролируемая поверхность соответствует j-му классу чистоты. Если же это условие не выполняется ни для одного класса чистоты, то контролируемую деталь относят к браку.
Полученная в результате обработки сигналов информация о принадлеж- нести контролируемой поверхности к определенному классу чистоты выводится: с помощью информативно-выходного устройства 17 электронного блока 13 обработки сигналов.
g
0
5
0
5
Q
0 5
0 5
Формула изобретения Устройство для контроля дефектов поверхностей оптических деталей, содержащее осветительную оптическую систем , оптически связанную через контролируемую поверхность с приемной оптической системой, блок сканирования и электронный блок обработки сигналов, отличаю- щ е ее я тем, что, с целью повышения производительности контроля, осветительная -система выполнена в виде установленных на одной оси последовательно по ходу световых лучей источника излучения, конденсатора, маски с отверстием, образованным радиальным участком сектора и кругом, центр которого совпадает с вершиной сектора и оптически сопряжен с центром контролируемой поверхности, проекционного объектива, а также установленного непосредственно за маской вращающегося дискового модулятора с прозрачными зонами в виде круга и одинаковых радиальных участков секторов, повторяющими форму и размеры соответствующей части отверстия маски, причем вершины секторов и центр круга равномерно расположены по окружности с радиусом,-авным расстоянию от центра круга отверстия маски до оси вращения модулятора, приемная система устройства состоит из установленных на одной оси последовательно по ходу световых лучей линзы, коллективной линзы, диафрагмы с отверстием, повторяющим форму отверстия маски, объектива и фотоприемника, причем центр круга отверстия диафрагмь оптически сопряжен с центром контролируемой поверхности и с чувствительной площадкой фотоприемника, а блок сканирования устройства включает предмет- Hbrft СТОЛ и электропривод вращения предметного стола и модулятора, при этом ось приемной системы параллельна ,оси вращения предметного стола и образует острый угол с осью осветительной системы, а оси симметрии отверстий маски и диафрагмы перпендикулярны плоскости, проходящей через оси осветительной и приемной оптических систем устройства.
Фu.
Фиг. 2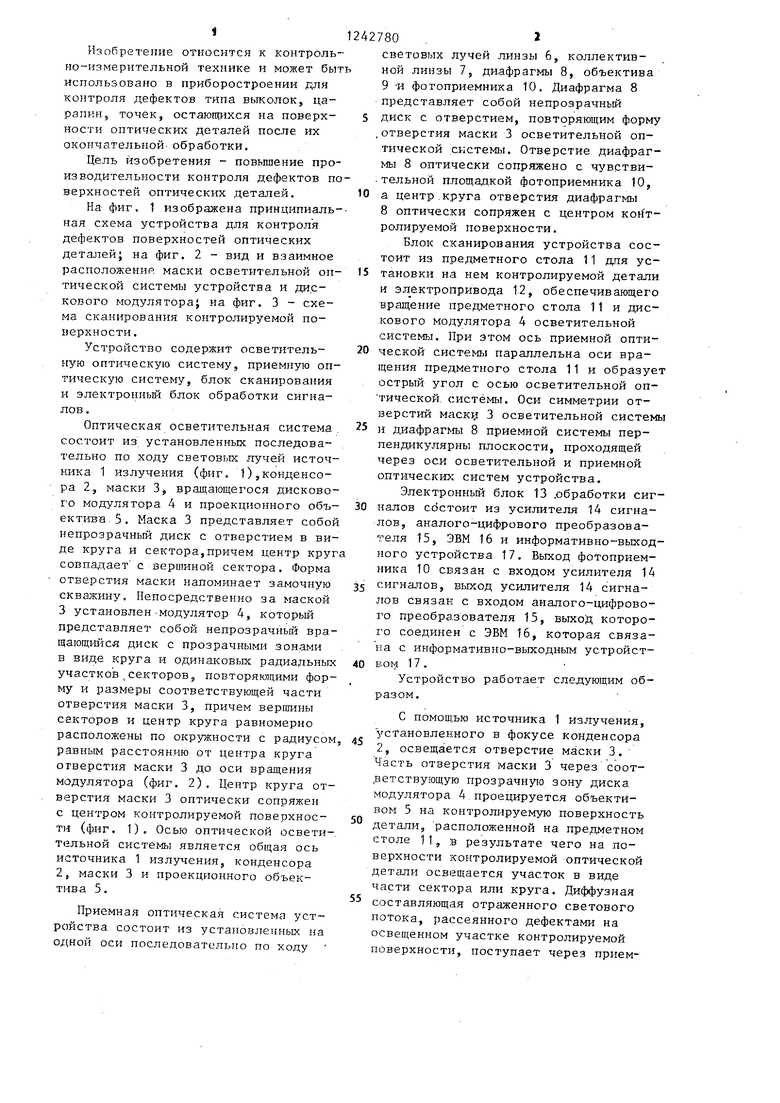
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля качества текстильных и трикотажных полотен | 1986 |
|
SU1409902A1 |
| Устройство для контроля текстильных и трикотажных полотен | 1985 |
|
SU1318868A1 |
| Устройство для контроля качества изготовления поверхности параболического отражателя | 1984 |
|
SU1267191A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2514162C1 |
| Сканирующий оптический микроскоп | 1991 |
|
SU1797717A3 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ МИКРООБЪЕКТА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2525152C2 |
| Фотоэлектрический дефектоскоп для контроля поверхностей тел вращения | 1973 |
|
SU499521A1 |
| Устройство для контроля полупроводниковой структуры | 1987 |
|
SU1422001A1 |
| Устройство для измерения вибраций объектов (его варианты) | 1984 |
|
SU1223029A1 |
| Устройство для контроля фокусировки проекционного объектива | 1983 |
|
SU1091104A1 |
Устройство для контроля дефектов поверхностей оптических деталей относится к контрольно-измерительной технике и может быть использовано в оптическом приборостроении. С целью повьшения производительности контроля осветительная оптическая система содержит маску, а также модулятор с диском, перфорированньтм ра- диальными участками секторов и одним кругом,.а приемная - диафрагму с отверстиями, 1 виде радиального участка сектора и круга. 3 ил. с @
Фиг.З
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Гребнев А.А | |||
| и др | |||
| Автоматический контроль дефектов оптических деталей | |||
| - Оптико-механическая про-, мьшшенность, 1984, № 5, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
