Известны способы автоматической компенсации помех работе Т-магнитометра, создаваемых магнитными полями платформы, на которую установлен магнитоме1р, например, самолета, основанные на применении компенсационных элементов, устанавливаемых вблизи магниточувствительных блоков магнитометра. Недостаток подобных способов состоит в сложности процесса компенсация помех, так как при их реализации приходится определять составляющие постоянных и индуктивных полей носителя по трем осям при эволюциях самолета. Для оформления этих составляющих необходимо производить з полете слолсные измерения значений модуля, вектора Т, его наклонения, курса, углов крена и уровня помех.
В описываемом способе этот недостаток устранен тем, что используемьи для компенсации помех сигнал, подаваемый на обмотку измерительного зонда, формируют в счетно-решающем устройстве, в котороз вводят данные о характере изменения помехи, значения двух углов отклонения носителя относительно вектора напряженности поля и величчны модуля этого вектора.
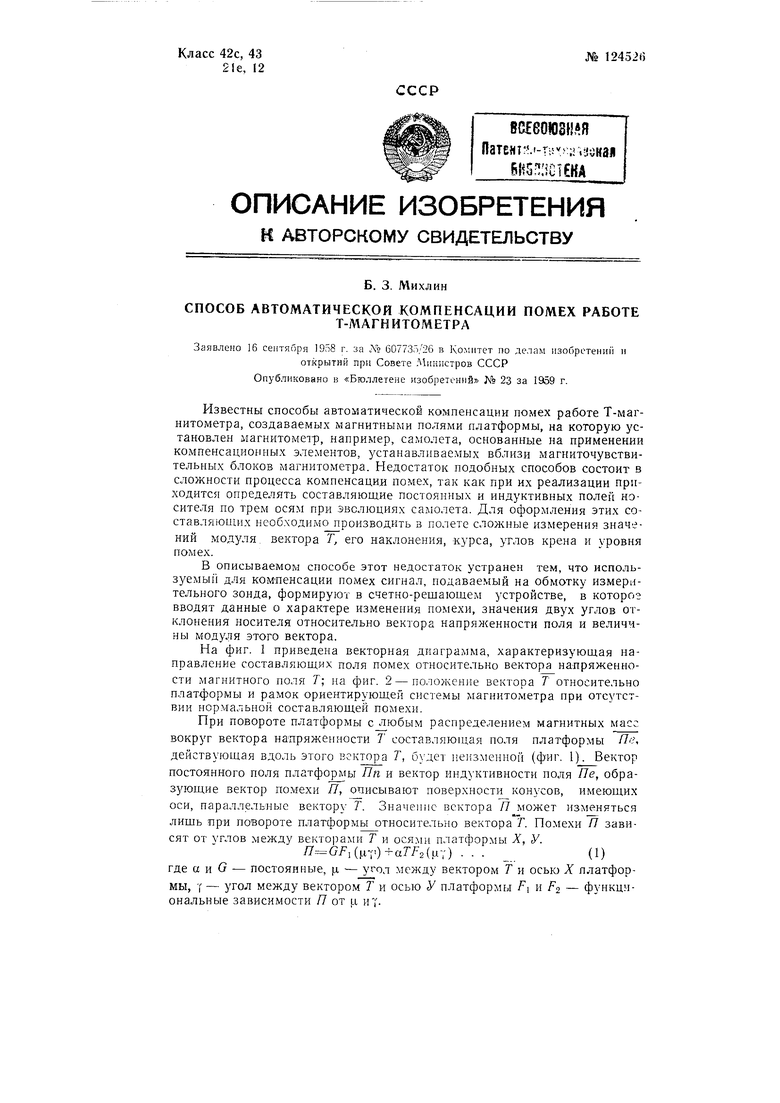
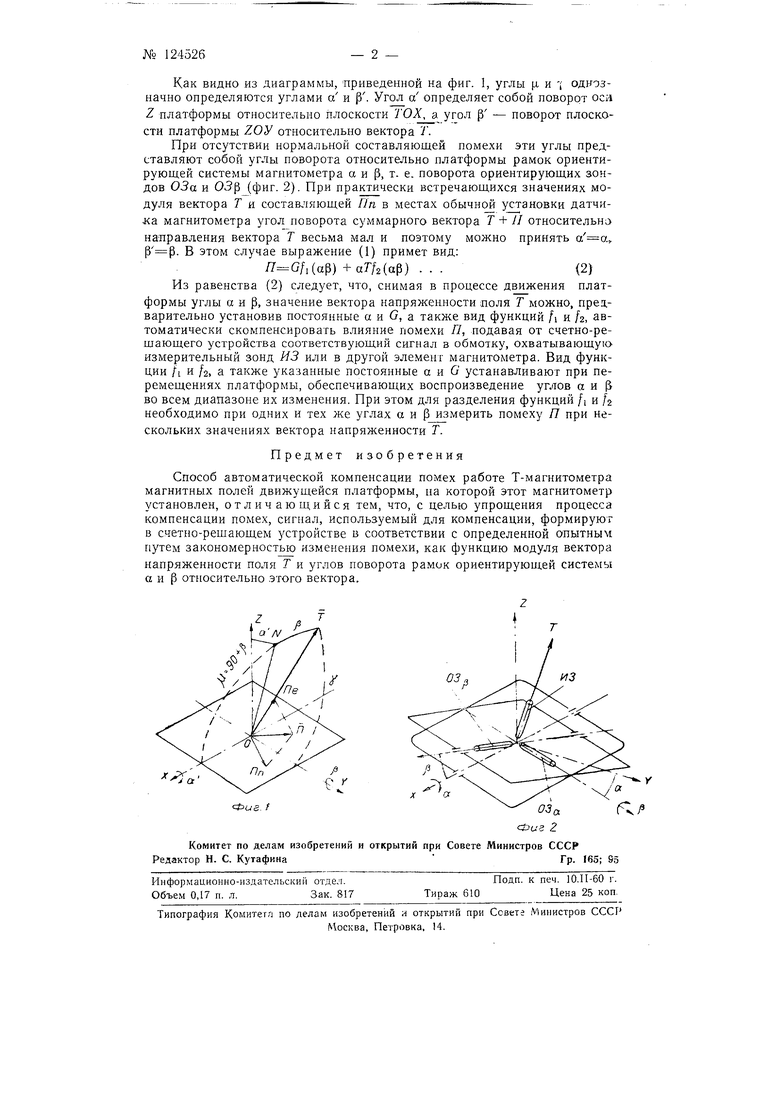
На фиг. 1 приведена векторная диаграмма, характеризующая направление составляющих поля помех относительно вектора напряженности магнитного поля Т; на фиг. 2 - положение вектора Т относительно платформы и рамок ориентирующей системы магнитометра при отсутствии нормальной составляющей помехи.
Нри повороте платформы с любым распределением магнитных масс вокруг вектора напряженности Т составляющая поля платформы Я., действующая вдоль этого вектора Т, будет неизменной (фиг. 1). Вектор постоянного поля платфорамы Пп и вектор индуктивности поля Пе, обра35ющие вектор помехи Я, описывают поверхпости конусов, имеющих оси, параллельные вектору Т. Значение вектора изм еняться лищь при повороте платформы относительно вектора Т. Помехи Я зависят от УГЛОВ между векторами Т и ося.ми платформы X, У.
(i.ir-)+aTF2( ... (О
где а и G - постоянные, д, - угол между вектором Т и осью X платформы, т - угол между вектором Т и осью У платформы f i и FZ - функциональные зависимости Я от LI и Т