Изобретение относится к области магнитоизмерительной и магнитометрической техники, в частности, к навигации с использованием данных о параметрах геомагнитного поля, магниторазведке, магнитному картографированию и т.д.; для измерения и компенсации магнитных помех подвижных носителей или устранения магнитной девиации навигационных компасов, индукционных датчиков магнитного курса и может быть использовано совместно с компенсаторами магнитных помех подвижных носителей прецизионных бескардановых магнитометров.
При магнитных измерениях на подвижном объекте (ПО), в частности, на летательном аппарате (ЛА), магнитная девиация индукционного датчика магнитного курса курсовой системы, создающая магнитные помехи, определяется соотношениями Пуассона [Гузеев С.Т., Семевский Р.Б. Определение параметров Пуассона по измерениям магнитной индукции Т-магнитометром. Геофизическая аппаратура. - Л.: Недра, 1980, вып.70, с.25…30], учитывающими влияние магнитомягкого и магнитотвердого железа на показания индукционного датчика. Из теории и практики измерения магнитных помех известно, что коэффициенты Пуассона и компоненты постоянного магнитного поля объекта, характеризующие помехи, можно считать постоянными величинами для конкретного фиксированного распределения ферромагнитных масс объекта. Поэтому задачей измерения параметров помех является определение коэффициентов Пуассона и составляющих постоянного магнитного поля подвижного объекта.
Известен способ определения коэффициентов Пуассона подвижного объекта в точке пространства, жестко связанной с системой координат объекта (патент РФ №2134426, кл. G01R 33/02, опуб. 10.08. 1999 г.), заключающийся в измерении в выбранном месте пространства при отсутствии подвижного объекта проекций вектора магнитной индукции на оси опорной системы координат, размещении подвижного объекта в упомянутом месте пространства, изменении углов курса, крена и тангажа объекта относительно опорной системы координат, синхронном измерении этих углов и проекций векторов магнитной индукции на объекте на оси системы координат объекта, причем проекции векторов магнитной индукции на объекте измеряют при трех различных значениях одного из углов курса, крена, тангажа объекта, но при двух других углах, равных нулю, затем изменяют по крайней мере один из двух упомянутых углов, равных нулю, измеряют эти углы и соответствующие им проекции вектора магнитной индукции на объекте и по указанным величинам, заданным в виде функций измеренных углов курса, крена и тангажа, и измеренным проекциям вектора магнитной индукции магнитного поля при отсутствии объекта определяют искомые проекции вектора магнитной индукции постоянного магнитного поля объекта и коэффициенты Пуассона.
К недостаткам известного способа можно отнести следующее. На практике существует целый ряд крупногабаритных и высокоскоростных объектов, например, самолетов, вертолетов, ракетоносителей, судов большого водоизмещения и т.д., для которых реализация подобного способа как в движении - из-за сложности осуществления эволюции, так и на специальных немагнитных стендах - сложна или невыполнима из-за необходимости осуществления продольных или поперечных кренов. Кроме того, необходимость точного определения проекций вектора индукции геомагнитного поля вызывает потребность правильного использования ориентиров на местности и поправок при изменении высоты полета и обеспечения стабильности угловых положений объекта в движении. Необходимость применения дорогостоящих горючих средств для обеспечения специальных полетов самолетов, вертолетов и других объектов повышает стоимость осуществления известного способа.
Известен способ определения девиации курсоуказателя подвижного объекта (авторское свидетельство SU № 1633930, кл. G01C 17/38, 1995 г.), при котором последовательно устанавливают объект в фиксированные курсовые положения, регистрируют показания курсоуказателя и обрабатывают результаты измерений. Дополнительно не менее чем в четырех курсовых положениях объекта измеряют нормальную составляющую напряженности магнитного поля объекта, углы крена и тангажа, а при обработке результатов измерений находят через коэффициенты Пуассона продольную, нормальную и поперечную составляющие магнитного поля объекта.
Устройство, реализующее данный способ, содержит, в частности, блок из трех ортогональных жестко закрепленных на корпусе объекта магнитометров для измерения проекций продольной, поперечной и нормальной составляющих вектора напряженности результирующего магнитного поля объекта на оси связанной системы координат OXYZ, вычислитель для определения в процессе предстартовой подготовки коэффициентов Пуассона и компонент магнитного поля объекта и вычислитель для определения угла магнитного курса подвижного объекта.
К недостаткам известных способа и устройства можно отнести, в т.ч., большой объем работ по измерению составляющих вектора напряженности результирующего магнитного поля объекта на разных курсах в период подготовки ЛА к полету.
Наиболее близким по технической сущности к заявляемому изобретению является способ определения магнитной девиации на подвижном объекте в точке пространства, жестко связанной с системой координат объекта (патент РФ №2365877, G01C 17/00, G01V 3/00, 27.08.2009 г.), заключающийся в измерении в выбранном месте пространства при отсутствии подвижного объекта магнитной индукции как проекции ее вектора на оси опорной системы координат, размещении подвижного объекта в упомянутом месте пространства, изменении углов курса объекта относительно опорной системы координат, синхронном измерении этих углов и проекций векторов магнитной индукции на объекте на оси системы координат объекта при трех различных значениях угла курса, затем измерении при отсутствии подвижного объекта магнитной индукции как проекции ее вектора на оси опорной системы координат в другом выбранном месте пространства (на другой географической широте или в аномальных полях) с другим существенно отличающимся значением проекции вектора магнитной индукции на вертикальную ось опорной системы координат, размещении подвижного объекта в данном месте пространства, затем, по крайней мере на одном из измеренных курсов относительно опорной системы координат измерении проекций вектора магнитной индукции на объекте на оси системы координат объекта, причем при измерении всех вышеупомянутых проекций векторов магнитной индукции на объекте в обоих местах пространства при равных нулю или малых (паразитных) измеряемых углах крена и тангажа объекта в движении (полете) или в стояночном положении, а затем определении коэффициентов Пуассона и проекций вектора магнитной индукции постоянного магнитного поля на оси объекта по указанным величинам, заданным в виде функций измеренных в обоих местах пространства углов курса, малых углов крена и тангажа и измеренным проекциям вектора магнитной индукции магнитного поля при отсутствии объекта, после этого определении по известным формулам магнитной девиации.
Недостатком известного способа является недостаточная точность определения их попарных сумм и разностей из-за ограниченно малых значений кренов, ограниченная возможность точного задания курсов с периодическими кренами и одинаковой амплитудой, а требование большого количества измерений магнитной индукции с поддержанием во времени постоянной частоты и амплитуды колебаний объекта усложняет реализацию способа в экстремальных условиях и приводит к существенным затратам времени на осуществление измерений и на их обработку, требующих существенного объема памяти вычислительного устройства.
Технической проблемой заявляемого изобретения является разработка способа определения магнитной девиации на подвижном объекте, позволяющего расширить технические возможности определения магнитной девиации на подвижном объекте в экстремальных условиях.
Техническим результатом является повышение точности способа определения магнитной девиации при отсутствии необходимости осуществления дополнительных продольных и поперечных кренов.
Для достижения технического результата в способе определения магнитной девиации на подвижном объекте в точке пространства, жестко связанной с системой координат объекта, заключающемуся в измерении в выбранном месте пространства параметров магнитного поля как проекции его вектора на оси опорной системы координат, измерении углов курса, крена и тангажа объекта, определении коэффициентов Пуассона и магнитной девиации, согласно изобретению, в качестве параметров магнитного поля используют напряжённость, которую измеряют с помощью трехкомпонентного бескарданового магнитометра, выбирают такие углы тангажа и крена подвижного объекта, при которых нормальная ось трехкомпонентного бескарданового магнитометра совпадает с направлением вектора напряженности геомагнитного поля, для каждого курсового угла определяют девиационную поправку как разность между значениями углов эталонного курса и текущего магнитного курса.
Новым в предлагаемом способе определения магнитной девиации на подвижном объекте в точке пространства, жестко связанной с системой координат объекта, является выполнение измерений трехкомпонентным бескардановым магнитометром напряженности геомагнитного поля в проекциях на оси опорной системы координат при таких определенных углах тангажа и крена подвижного объекта, при которых нормальная ось трехкомпонентного бескарданового магнитометра совпадает с направлением вектора напряженности геомагнитного поля, а разворот трехкомпонентного бескарданового магнитометра вокруг его нормальной оси осуществляют на 360 угловых градусов, и при этом, вычисляя магнитный курс по сигналам трехкомпонентного бескарданового магнитометра и сравнивая его со значением эталонного магнитного курса, определяют величины девиационных поправок на каждом угле курса подвижного объекта.
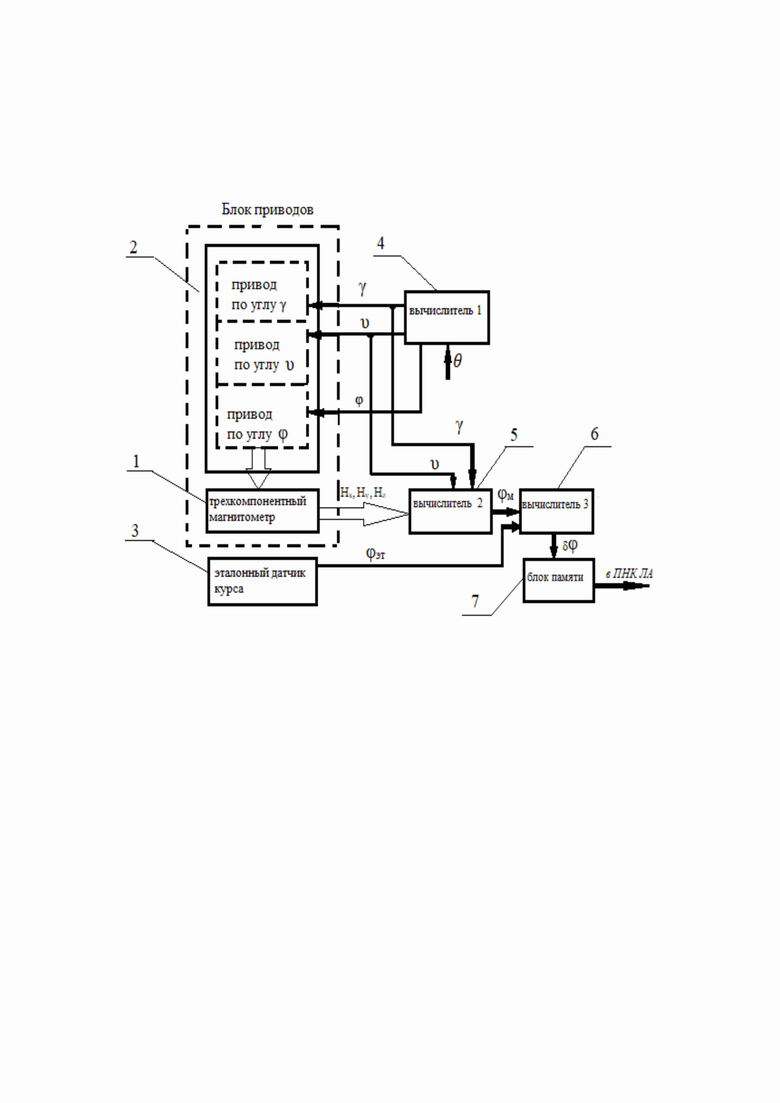
Предлагаемый способ определения магнитной девиации на подвижном объекте может быть реализован с помощью устройства, блок-схема которого приведена на чертеже, где цифрами обозначено:
1 - трехкомпонентный бескардановый магнитометр, установленный на немагнитной площадке, способной разворачиваться по сигналам блока приводов 2;
2 - блок приводов по углам разворота тангажа, крена и курса;
3 - эталонный датчик курса
4 - первый вычислитель для определения углов тангажа и крена летательного аппарата (ЛА), однозначно связанных с углом курса ЛА и углом магнитного наклонения, при которых нормальная ось трехкомпонентного бескарданового магнитометра 1 совпадает с направлением вектора напряженности  ;
;
5 - второй вычислитель для определения угла магнитного курса подвижного объекта;
6 - третий вычислитель для определения величины девиационной поправки к углу курса подвижного объекта;
7 - блок памяти для хранения массива девиационных поправок для значений определенных углов курса подвижного объекта.
При этом выходы первого вычислителя 1, на вход которого, например, с потенциометра ручной выставки, вводится фактическое значение угла магнитного наклонения, по углам тангажа и крена, при которых вертикальная ось ЛА совпадает с направлением вектора ; соединены с входами второго вычислителя 5 и блока приводов 2 по углам разворота тангажа, крена и курса, на котором на немагнитной площадке установлен трехкомпонентный бескардановый магнитометр 1, способной разворачиваться по сигналам блока приводов 2; выходы трехкомпонентного магнитометра 1 соединен с входами второго вычислителя 5, а выход второго вычислителя 5 и выход эталонного датчика курса 3 соединен с входами третьего вычислителя (6), выход которого соединен с блоком памяти 7, в котором сохраняется массив девиационных поправок к углам курса подвижного объекта.
Способ осуществляется следующим образом.
В начальный момент времени при нулевом угле курса на горизонтированной немагнитной площадке, размещенной в помещении с отсутствием магнитных возмущений и помех и способной разворачиваться по сигналам блока приводов 2, устанавливают и ориентируют по ее продольной, нормальной и боковой осям трехкомпонентный бескардановый магнитометр 1. В первый вычислитель 4 с помощью, например, потенциометра ручной выставки, вводят значение текущего угла магнитного наклонения, после чего приводят в движение блок приводов 2 по углам разворота тангажа, крена и курса. При этом горизонтированная немагнитная площадка с установленным на ней трехкомпонентным бескардановым магнитометром 1 по определенным в первом вычислителе углам тангажа и крена при помощи соответствующих приводов разворачивается таким образом, чтобы ее вертикальная ось и, следовательно, нормальная ось трехкомпонентного бескарданового магнитометра 1, совпадала с направлением вектора напряженности геомагнитного поля; после чего с помощью привода по курсовому углу она совершает в указанном положении разворот на 360 угловых градусов. Второй вычислитель 5 по сигналам трехкомпонентного бескарданового магнитометра 1 о проекциях вектора напряженности геомагнитного поля на его входные оси и информации вычислителя 1 о текущих углах тангажа и крена постоянно при развороте определяет текущее значение магнитного курса φм, поступающее в третий вычислитель 6, в который также постоянно, например, с частотой (10…50 Гц) поступает с эталонного датчика курса 3 значение эталонного угла курса φэт. В третьем вычислителе 6 постоянно определяется как разность между значением эталонного угла курса φэт и текущего угла магнитного курса φм величина девиационной поправки δφ для каждого курсового угла, которая далее поступает в блок памяти 7 и запоминается в нем. В дальнейшем при движении подвижного объекта (ПО), в том числе, полете ЛА, величины девиационных поправок из блока памяти 7 поступают в пилотажно-навигационный комплекс ЛА и учитываются в показаниях курса, определенных по сигналам трехкомпонентного бескарданового магнитометра курсовой системы ЛА, выполняя тем самым результат девиационных работ, то есть, осуществляя коррекцию по углу курса и устраняя погрешности от магнитной девиации магниточувствительных датчиков курсовых систем.
Приведем теоретическое обоснование, позволяющее реализовать предлагаемый способ.
Магнитная девиация магниточувствительных датчиков обусловлена наличием собственного магнитного поля подвижного объекта, которое содержит постоянную и переменную составляющую, а изменение проекций результирующего магнитного поля подвижного объекта на оси чувствительности магниточувствительных датчиков связано с изменением ориентации подвижного объекта относительно вектора напряженности геомагнитного поля. Поэтому постоянное магнитное поле носителя зависит от наличия на подвижном объекте элементов из магнитомягких и магнитотвердых материалов, характеризующихся магнитной восприимчивостью к внешнему магнитному полю (намагниченностью в технологических и эксплуатационных условиях).
Эта составляющая напряженности магнитного поля носителя (δНп=colon (P, Q, R) фиксирована относительно корпуса основания при изменении ориентации объекта. Переменное магнитное поле носителя δНпер складывается из четырех составляющих: магнитного поля вихревых токов δНвх; индуктивного поля магнитных масс δНи; магнитного поля электрических нагрузок δНэ; магнитного поля двигателей δНдв.
Напряженность результирующего магнитного поля носителя определяется векторной суммой составляющих

где: – напряженность геомагнитного поля,  .
.
Превалирующую роль в формировании магнитного поля носителя обычно играют три первые составляющие (причем  и
и  образуют в сумме магнитные помехи от ферромагнитных масс
образуют в сумме магнитные помехи от ферромагнитных масс  ), определяемые в проекциях на связанные оси объекта OXYZ векторно-матричным уравнением Пуассона:
), определяемые в проекциях на связанные оси объекта OXYZ векторно-матричным уравнением Пуассона:

где: S - матрица коэффициентов Пуассона:

A - матрица направляющих косинусов; то есть, матрица ориентации системы координат, связанной с объектом OXYZ, относительно горизонтальной геомагнитной системы координат; определяемая тригонометрическими функциями углов ориентации:

φ, υ, γ - углы магнитного курса, тангажа и крена ЛА, соответственно.
Укажем, что в работе авторов "Построение алгоритмов функционирования безгироскопной системы ориентации", ["Гироскопия и навигация", № 2, 1993 г., с. 12…17] получены и приведены алгоритмы определения магнитного курса на борту ПО – в частности ЛА - для различных режимов полета.
Для этого используется информация жестко установленных относительно связанных осей ПО трехкомпонентного бортового магнитометра и трех акселерометров, измерительные оси которых параллельны соответствующим осям ПО.
Дополнительно рассмотрим трехкомпонентный магнитометр, чувствительные элементы которого жестко установлены на борту ЛА таким образом, что углы крена (γ) и тангажа (υ) ЛА одновременно являются углами отклонения чувствительных элементов магнитометра от горизонтальной плоскости. Показания магнитометра определяются проекциями вектора напряженности геомагнитного поля на оси датчика. Рассмотрим следующий вариант определения магнитного курса на борту ЛА. Используя ранее принятые обозначения, запишем проекции вектора напряженности геомагнитного поля на оси горизонтального сопровождающего трехгранника:

Символ “T” обозначает операцию транспонирования матричного произведения. Запишем в скалярной форме уравнения (4):

Тогда угол магнитного курса ЛА, определяемый по приведенным ранее соотношениям, с учетом (4) запишем следующим образом:

Отметим, что при совпадении нормальной оси ЛА с направлением вектора (то есть, при Нx=Нz=0) соотношение (5) принимает следующий вид:

Все множество пространственных положений чувствительного элемента магнитометра, при которых проекции вектора на горизонтальную плоскость нулевые (Нx=Нz=0), может быть получено путем вращения чувствительного элемента магнитометра на угол  вокруг его нормальной оси Oη1, предварительно совмещенной с направлением вектора .
вокруг его нормальной оси Oη1, предварительно совмещенной с направлением вектора .
С другой стороны, все это множество пространственных положений чувствительного элемента магнитометра может быть получено путем трех последовательных поворотов трехгранника Oζηξ на углы φ, υ, γ – курса, тангажа и крена ЛА. Запишем это в матричной форме:

где θ – угол магнитного наклонения.
Решая матричное уравнение (7), приравнивая соответствующие элементы матриц и, исключая из соотношения вспомогательный угол (χ), получаем в итоге следующие зависимости, связывающие углы тангажа и крена ЛА с углом курса ЛА и углом магнитного наклонения, при которых вертикальная ось ЛА совпадает с направлением вектора :

Программный разворот немагнитной площадки с размещенным на ней трехкомпонентным бескардановым магнитометром 1 на углы тангажа (υкор) и крена (γкор), при которых нормальная ось трехкомпонентного бескарданового магнитометра 1, совпадает с направлением вектора напряженности геомагнитного поля; а также ее последующий разворот на 360 угловых градусов вокруг нормальной оси осуществляется блоком приводов 2, например, с помощью стандартных малогабаритных электроприводов – актюаторов (официальный сайт: www.actuator.com), имеющих магнитную экранировку.
В качестве гироскопических датчиков для определения курса и вертикали, а также магнитометрических датчиков могут быть использованы, например, микросборки (IMU) высокоточных датчиков, выполненные по МЕМS-технологии, например, MEMS типов SFIM300 и др. компании Sensonor AS, Norway; (официальный сайт www.sensonor.com), а также Инерциальный модуль ГКВ-5, разработанный и выпускаемый в Лаборатории Микроприборов, Зеленоград, Россия, (официальный сайт www.mp-lab.ru).
Инерциальный модуль ГКВ-5 выполнен в малых габаритах и состоит из триады МЭМС-датчиков угловой скорости, триады МЭМС-акселерометров, высокопроизводительного вычислителя, магнитометра, датчика давления и необходимой периферии. Каждый модуль индивидуально калибруется во всем диапазоне рабочих температур.
В качестве эталонного датчика курса могут быть использованы, например, прецизионные волоконно-оптические гироскопы группы ВГ 035, имеющие дрейф не более 0,30/час, выпускаемые ЗАО “Физоптика”, г. Арзамас, Россия, (официальный сайт: https://www.fizoptika.ru).
Предложенные зависимости для определения во время полета магнитного курса объекта, горизонтальной и вертикальной составляющих геомагнитного поля и других величин могут быть реализованы вычислительным путем в бортовой ЦВМ.
Изобретение относится к области измерительной техники, в частности к навигации с использованием данных о параметрах геомагнитного поля, магниторазведке, магнитному картографированию и т.д. Сущность предлагаемого изобретения заключается в следующем. В способе определения магнитной девиации на подвижном объекте, заключающемся в измерении параметров магнитного поля как проекции его вектора на оси опорной системы координат, измерении углов курса, крена и тангажа объекта, определении коэффициентов Пуассона и магнитной девиации, в качестве параметров магнитного поля используют напряжённость, измеряемую с помощью трехкомпонентного бескарданового магнитометра, выбирают такие углы тангажа и крена подвижного объекта, при которых нормальная ось трехкомпонентного бескарданового магнитометра совпадает с направлением вектора напряженности геомагнитного поля. При этом для каждого курсового угла определяют девиационную поправку как разность между значениями углов эталонного курса и текущего магнитного курса. Техническим результатом заявленного изобретения является повышение точности способа определения магнитной девиации при отсутствии необходимости осуществления дополнительных продольных и поперечных кренов. 1 ил.
Способ определения магнитной девиации на подвижном объекте в точке пространства, жестко связанной с системой координат объекта, заключающийся в измерении в выбранном месте пространства параметров магнитного поля как проекции ее вектора на оси опорной системы координат, измерении углов курса, крена и тангажа объекта, определении коэффициентов Пуассона и магнитной девиации, отличающийся тем, что в качестве параметров магнитного поля используют напряжённость, которую измеряют с помощью трехкомпонентного бескарданового магнитометра, выбирают такие углы тангажа и крена подвижного объекта, при которых нормальная ось трехкомпонентного бескарданового магнитометра совпадает с направлением вектора напряженности геомагнитного поля, осуществляют разворот горизонтированной немагнитной площадки на 360 угловых градуса, при этом определяют текущее значение магнитного курса, а для каждого курсового угла определяют девиационную поправку как разность между значениями углов эталонного курса и текущего магнитного курса.
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2008 |
|
RU2365877C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ ДЕВИАЦИИ МАГНИТОМЕТРИЧЕСКИХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550774C1 |
| WO 2020146855 A1, 16.07.2020 | |||
| US 20200158505 A1, 21.05.2020. | |||

