Изобретение относится к области магнитоизмерительной техники, в частности к магнитной навигации, магниторазведке, магнитному картографированию и т.д., для измерения и компенсации магнитных помех носителей или устранения магнитной девиации магнитных навигационных компасов и может быть использовано совместно с компенсаторами магнитных помех носителей прецизионных бескарданных магнитометров.
При магнитных измерениях на подвижном объекте его собственные магнитные помехи или, что то же самое - магнитная девиация, определяются выражениями Пуассона [1, с.25-30], учитывающими влияние мягкого и твердого в магнитном отношении железа. Из теории и практики измерения магнитных помех известно, что коэффициенты Пуассона и компоненты постоянного магнитного поля объекта, характеризующие помехи, можно считать постоянными величинами для конкретного фиксированного распределения ферромагнитных масс объекта. Поэтому задачей измерения параметров помех является определение коэффициентов Пуассона и составляющих постоянного магнитного поля объекта.
Известен способ определения и устранения магнитных помех на подвижном объекте [2, с.44-58], заключающийся в измерении модуля вектора магнитной индукции сначала при периодических поперечных, а затем продольных кренах объекта на четырех основных магнитных курсах, соответственно равных 0°, 90°, 180°, 270°, при прохождении объекта над ориентиром. Затем по измеренным параметрам магнитного поля, известному наклонению и модулю вектора магнитного поля Земли (МПЗ) в районе пребывания объекта определяют две разности и три суммы коэффициентов Пуассона, а также составляющие постоянного магнитного поля объекта.
Недостатком известного способа является отсутствие возможности определения полного набора всех коэффициентов Пуассона, низкая точность определения их попарных сумм и разностей из-за ограниченно малых значений кренов. Кроме того, ограниченная возможность точного задания курсов с периодическими кренами и одинаковой амплитудой также ограничивают точность способа, а требование большого количества измерений магнитной индукции с поддержанием во времени постоянной частоты и амплитуды колебаний объекта усложняет реализацию способа, например, для тяжеловесных объектов (судна, самолета и т.д.) и приводит к существенным затратам времени на осуществление измерений и на их обработку, требующих существенного объема памяти вычислительного устройства.
Устранением многих недостатков обладает известный также способ определения коэффициентов Пуассона подвижного объекта [3] в точке пространства, жестко связанной с системой координат объекта, заключающийся в измерении в выбранном месте пространства модуля вектора магнитной индукции при отсутствии объекта, размещении объекта в упомянутом месте, в изменении и измерении, по крайней мере, двух из трех углов курса, крена, тангажа объекта и определении по измеренным углам направляющих косинусов осей системы координат объекта в опорной системе координат, измерение проекций векторов магнитной индукции синхронно с измерениями углов, выборе проекций десяти векторов магнитной индукции, при которых направляющие косинусы осей различны, и определении коэффициентов Пуассона и проекций постоянного магнитного поля объекта по результатам вышеупомянутых измерений.
Недостатком известного способа является сложность его осуществления для тяжеловесных объектов, обусловленная большим количеством изменений и измерений углов курса, крена, тангажа объекта и измерений проекций векторов магнитной индукции, требующих существенного объема памяти вычислительного устройства и времени обработки результатов.
Заметное исключение указанных недостатков осуществлено в известном способе определения коэффициентов Пуассона подвижного объекта в точке пространства, жестко связанной с системой координат объекта [4], который по совокупности существенных признаков наиболее близок к предлагаемому и принят за прототип.
Указанный способ заключается в измерении в выбранном месте пространства при отсутствии подвижного объекта проекций вектора магнитной индукции на оси опорной системы координат, размещении подвижного объекта в упомянутом месте пространства, изменении углов курса, крена и тангажа объекта относительно опорной системы координат, синхронном измерении этих углов и проекций векторов магнитной индукции на объекте на оси системы координат объекта, причем проекции векторов магнитной индукции на объекте измеряют при трех различных значениях одного из углов курса, крена, тангажа объекта, но при двух других углах, равных нулю, затем изменяют по крайней мере один из двух упомянутых углов, равных нулю, измеряют эти углы и соответствующие им проекции вектора магнитной индукции на объекте и по указанным величинам, заданным в виде функций измеренных углов курса, крена и тангажа, и измеренным проекциям вектора магнитной индукции магнитного поля при отсутствии объекта определяют искомые проекции вектора магнитной индукции постоянного магнитного поля объекта и коэффициенты Пуассона.
Существует целый ряд тяжеловесных и высокоскоростных объектов, например самолетов, вертолетов, больших ракет, судов с большим водоизмещением и т.д., для которых реализация подобного способа как в движении из-за сложности осуществления эволюции, так и на специальных немагнитных стендах сложна или невыполнима из-за необходимости осуществления продольных или поперечных кренов. Кроме того, необходимость точного определения проекций вектора индукции МПЗ вызывает потребность правильного использования ориентиров на местности и поправок при изменении высоты полета и обеспечения стабильности угловых положений объекта в движении. Необходимость применения дорогостоящих горючих средств для обеспечения специальных полетов самолетов, вертолетов и прочих объектов повышает стоимость осуществления известного способа.
Целью предлагаемого изобретения является повышение точности и расширение технической возможности определения магнитной девиации на тяжеловесном подвижном объекте, то есть задачей изобретения является повышение точности способа определения девиации при отсутствии необходимости осуществления продольных и поперечных кренов, а также возможности определения помех не только в движении, но и в статическом - стояночном положении объекта без применения дорогостоящих поворотных немагнитных стендов.
Предлагаемый способ определения магнитной девиации на подвижном объекте в точке пространства, жестко связанной с системой координат объекта, заключается в измерении в выбранном месте пространства при отсутствии подвижного объекта магнитной индукции как проекции ее вектора на оси опорной системы координат, размещении подвижного объекта в упомянутом месте пространства, изменении углов курса объекта относительно опорной системы координат, синхронном измерении этих углов и проекций векторов магнитной индукции на объекте на оси системы координат объекта при трех различных значениях угла курса, затем измерении при отсутствии подвижного объекта магнитной индукции как проекции ее вектора на оси опорной системы координат в другом выбранном месте пространства (на другой географической широте или в аномальных полях) с другим существенно отличающимся значением проекции вектора магнитной индукции на вертикальную ось опорной системы координат, размещении подвижного объекта в данном месте пространства, затем, по крайней мере на одном из измеренных курсов относительно опорной системы координат измерении проекций вектора магнитной индукции на объекте на оси системы координат объекта, причем при измерении всех вышеупомянутых проекций векторов магнитной индукции на объекте в обоих местах пространства при равных нулю или малых (паразитных) измеряемых углах крена и тангажа объекта в движении (полете) или в стояночном положении, а затем определении коэффициентов Пуассона и проекций вектора магнитной индукции постоянного магнитного поля на оси объекта по указанным величинам, заданным в виде функций измеренных в обоих местах пространства углов курса, малых углов крена и тангажа и измеренным проекциям вектора магнитной индукции магнитного поля при отсутствии объекта, после этого определении по известным формулам магнитной девиации.
Сущность предлагаемого способа поясняется используемым в прототипе [4] устройством, представленным на функциональной схеме.
Компоненты вектора магнитной индукции на объекте определяются в матричном виде уравнениями Пуассона

где S - тензор магнитных масс мягкого железа объекта или матрица коэффициентов Пуассона а, b, с, d, e, f, g, h, k, причем

* - знак транспонирования; ВX, BY, BZ - составляющие суммарной индукции МПЗ и объекта по осям O'X', O'Y', O'Z' объекта, a В'X, B'Y, B'Z - составляющие индукции магнитного поля Земли по этим осям; ВXP, ВYP, BZP - составляющие магнитной индукции по осям объекта, вызванной постоянной намагниченностью, то есть компоненты вектора магнитной индукции от намагничивания твердого железа объекта.
В выражении (1) выделим матричное выражение для определения магнитной девиации

где ΔBX=ВX-В'X, ΔВY=ВY-В'Y, ΔBZ=BZ-B'Z.
Для объекта компоненты вектора магнитной индукции B'X, B'Y, B'Z в координатах объекта можно представить в виде

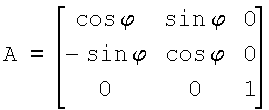
где BXt, BYt, BZt компоненты вектора индукции МПЗ в координатах опорной системы координат OXYZ, у которой, например, ось ОХ совпадает с направлением горизонтальной составляющей BXt вектора магнитной индукции геомагнитного поля (МПЗ), касательного к магнитному меридиану и направленного на северный магнитный полюс, ось OZ совпадает с вертикальной составляющей BZt вектора индукции МПЗ и направленного вниз, а ось OY перпендикулярна осям ОХ и OZ и направлена в сторону востока (в данном случае BYt=0); А - матрица преобразования (поворота) проекций BXt, BYt, BZt вектора индукции опорной (горизонтальной) системы координат OXYZ в проекции В'X, B'Y, B'Z связанной с осями объекта системы координат O'X'Y'Z'. Взаимное положение систем OXYZ и O'X'Y'Z' характеризуется тремя эйлеровыми углами: курса φ, крена θ и тангажа ψ, то есть согласно [5, с.72]

В предлагаемом способе идеальной является установка объекта на заданные курсы при равных нулю углах крена и тангажа. В [6, с.26-39] показано, что в реальном движении объекта условие обеспечения равенства нулю продольных и поперечных кренов при поворотах объекта по курсу невыполнимо, так как поворот относительно любой из осей объекта вызывает дополнительные (паразитные) повороты относительно двух других осей, причем эти паразитные эволюции при движении могут быть уменьшены только частично. При проведении процедур определения параметров Пуассона в статическом положении объекта значения стояночных углов θ и ψ изменяются при каждой установке объекта на заданный курс. Принимая во внимание малость паразитных углов, то есть sinθ≈θ, cosθ≈1, simψ≈ψ, cosψ≈1 и пренебрегая величинами второго порядка малости, выражение (5) приводится к виду

и в частности при θ=ψ=0 имеем
Вводя обозначения матриц
 ,
,  ,
, 
приведем выражение (1) с учетом (4) к следующему упрощенному виду
М=М'+SМ'+Мр
или

где
Q=М-М'=М-АMt, Mt=[BXtBYtBZt]*
В выражении (7) элементы матрицы Mt являются известными значениями измеренных компонент BXt, BYt, BZt в опорной системе координат при отсутствии объекта. Элементы матрицы А, измеряемые углоизмерительным устройством, определяют положение объекта относительно опорной системы координат на разных курсах при малых или равных нулю стояночных или полетных значениях паразитных углов крена и тангажа. Элементы матрицы М также являются известными значениями, измеряемыми, например, трехкомпонентным магнитометром с жестко связанными с объектом осями. Задачей изобретения является реализация оптимальных матричных преобразований для получения системы уравнений, решением которой являются неизвестные значения элементов матриц Мр и S. При этом необходимым условием преобразований в отличие от прототипа, является исключение поворотов объекта по крену и тангажу, в виду их сложной реализации для тяжеловесных объектов. Для этого осуществим процедуры измерений и поворотов объекта в двух разных точках земного пространства с существенно отличающимися значениями вертикальных составляющих вектора индукции геомагнитного поля.
Осуществляя синхронное измерение на объекте проекций результирующего вектора магнитной индукции и углов поворота при трех заданных значениях угла курса φi (i=1, 2, 3) при малых или равных нулю двух других углов θ и ψ в первой выбранной точке пространства, а затем во второй точке пространства на другой географической широте или в аномальных полях на одном из значений углов курса, например, из вышеуказанных значений φi=φ4=φ3 при предварительно измеренных значениях проекций ВXt1, ВYt1, BZt1 в первой (Mt1=[ВXt1ВYt1BZt1]*), а затем проекций ВXt2, ВYt2, BZt2 во второй точке пространства (Mt2=[ВXt2ВYt2BZt2]*), получим значения проекций векторов магнитной индукции, определяемые в первом случае матричными выражениями Мi=[ВXiBYiBZi] при i=1, 2, 3 и во втором случае выражением Мi=М4=[ВX4ВY4BZ4]* (i=4). В данном случае запишем общую систему матричных уравнений для преобразований (7) в обоих точках земного пространства
 ,
,
или в развернутом виде
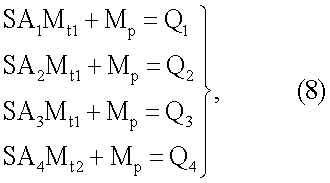
где
Qi=Mi-AiMti при i=1, 2, 3 и Q4=M4-A4Mt2 при i=4.
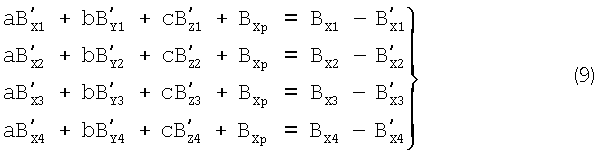
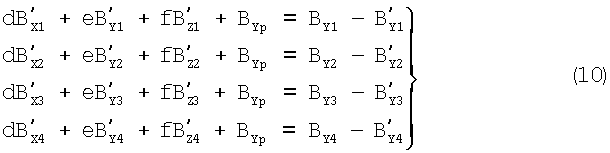
В системе линейных уравнений (8) с учетом выражений (1), (2), выделим три подсистемы уравнений

Все полученные системы уравнений (9)-(11) имеют общий определитель, представляемый в следующем виде

Решения первой системы уравнений (9) можно определить с помощью выражений

соответственно второй системы (10)

и третьей (11)

где Δа, Δb, Δс, Δd, Δе, Δf, Δg, Δh, Δk, и ΔBxp, ΔBур, ΔBzр - дополнительные определители, получаемые из определителя системы Δ путем замены коэффициентов при указанном неизвестном на соответствующие свободные члены qji=Bji-B'ji (j=X, Y, Z; i=1, 2, 3, 4).
Запишем выражения элементов определителя (10), полученных с помощью выражения (4) подстановкой в него выражений (2), (6) с учетом равенства BYt=-0

В частности, при φ1=0, φ2=90° и φ3=180° имеем

Следовательно, с помощью полученных выражений, представляющих преобразования в двух точках пространства с существенно различными значениями вертикальной составляющей вектора индукции МПЗ (BZt1≠BZt2), определяются элементы матриц S и Мр, то есть коэффициенты Пуассона и компоненты постоянного магнитного поля объекта, характеризующие магнитные помехи последнего, или, что то же самое, магнитную девиацию (3).
В простейшем случае при θi=ψi=0 (i=1, 2, 3, 4) последние выражения, определитель и свободные члены qji=Bji-B'ji (j=X, Y, Z) линейных систем уравнений, определяемых выражениями (8) или (9)-(11), приводятся к следующему виду



Подстановкой полученных выражений (19), (20) в выражения формул (13)-(15) получим в данном случае следующие решения систем уравнений (9)-(11) при BZt1≠BZt2
 ,
,
 ,
,
 ,
,  ,
,  ,
,
 ,
,  ,
, 
 ,
,
 ,
,
 ,
,
 .
.
Устройство для осуществления способа определения магнитной девиации на подвижном объекте, представленное на функциональной схеме, содержит установленные на объекте 6 последовательно соединенные трехкомпонентный магниточувствительный датчик 1, трехканальный блок преобразователей 2, регистрирующий блок 3 и устройство обработки информации 4, а также углоизмерительное устройство 5, с первого по третий выходы которого подключены соответственно к четвертому, пятому и шестому входам регистрирующего блока 3.
Заявленный способ реализуется посредством показанного устройства следующим образом.
На первом, втором и третьем выходах трехкомпонентного датчика 1 формируются напряжения полезного сигнала, амплитуда каждого из которых пропорциональна проекции вектора магнитной индукции на соответствующую магнитную ось датчика 1. Выходные сигналы с датчика 1 в трехканальном блоке преобразователей 2 усиливаются, детектируются и преобразуются в напряжения постоянного тока или в кодовые эквиваленты, подаваемые соответственно на первый второй и третий входы регистрирующего блока 3, на четвертый, пятый и шестой входы которого подаются выходные сигналы с углоизмерительного устройства 5, пропорциональные соответственно углам курса, крена и тангажа объекта 6. Регистрирующий блок обеспечивает синхронную регистрацию сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена и тангажа, и передачу их на устройство обработки информации 4. В последнее осуществляется ввод данных о проекциях вектора индукции магнитного поля на оси опорной системы координат (BXt1, ВYt1, BZt1 и ВXt2, BYt2, BZt2) при отсутствии объекта соответственно в первом и во втором местах пространства (например, на разных географических широтах) с различными значениями вертикальной составляющей вектора индукции МПЗ. При нахождении объекта 6 в первом месте пространства в устройство обработки информации 4 осуществляется также ввод данных Bji (j=X, Y, Z; i=1, 2, 3), получаемых в процессе измерений при проведении последовательных поворотов объекта, то есть проекций векторов магнитной индукции на оси объекта на трех различных курсах φ1, φ2, φ3 при соответствующих им малых или равных нулю стояночных углов крена θ1, θ2, θ3 и тангажа ψ1, ψ2, ψ3 при проведении измерений в стояночном положении объекта 6 на неармированной площадке или также при малых или равных нулю значениях этих углов (θ, ψ) при проведении измерений в полете на трех вышеуказанных курсах. При нахождении объекта 6 во втором месте пространства в устройство обработки информации 4 осуществляется также ввод данных Вji при i=4, получаемых в процессе измерений на одном из вышеуказанных курсов (например, φ3 при соответствующих ему стояночных или малых (в полете) углов крена (θ4) и тангажа (ψ4). Далее по результатам измерений в первом и во втором местах (пунктах) земного пространства в устройстве обработки информации 4 с помощью выражений (16) или (17) определяются значения компонент Bji (j=X, Y, Z; i=1, 2, 3, 4), а затем при подстановке их в выражения (12)-(15) с помощью последних осуществляется определение всех девяти коэффициентов Пуассона и компонент постоянного магнитного поля объекта 6. Подстановкой этих значений в выражение (3) определяется магнитная девиация на объекте.
Выполнение магниточувствительного датчика 1 и трехканального блока преобразователей 2 по известной схеме прецизионного феррозондового магнитометра [7], а реализация углоизмерительного устройства на основе гиростабилизированной платформы или в виде навигационной системы на основе лазерных гироскопов является одним из возможных вариантов построения устройства определения параметров Пуассона [4]. Следовательно, с помощью показанного устройства подтверждается техническая реализуемость предложенного способа.
Заявленный способ исключает необходимость осуществления поворотов объекта по крену и тангажу, что обеспечивает возможность определения магнитной девиации не только в движении, но и в статическом стояночном положении объекта, обеспечивая тем самым точность изменения, а следовательно, и измерения углов, а также компонент вектора индукции, что в свою очередь повышает возможность и точность определения магнитной девиациии на тяжеловесных объектах без осуществления поворотов по крену и тангажу, и при малом количестве изменений и измерений углов.
Литература
1. Гузеев С.Т., Семевский Р.Б. Определение параметров Пуассона по измерениям магнитной индукции Т-магнитометром. Геофизическая аппаратура. - Л.: Недра, 1980, выл.70.
2. Лысенко А.П. Теория и методы компенсации магнитных помех. Сб. статей «Геофизическое приборостроение». - Л.: Мингеологии и охраны недр СССР, ОКБ, 1960, вып.7.
3. Патент РФ №2096818, G05D 1/08, 1997.
4. Патент РФ №2134426, 6 G01R 33/02, 1998.
5. Ривкин С.С. Статистический синтез гироскопических устройств. Л.: Судостроение, 1970.
6. Резник Э.Е., Канторович В.Л. Некоторые вопросы компенсации магнитных полей самолета. // Сб. статей, «Геофизическое приборостроение». Л.: Недра, 1964, вып.18.
7. Афанасьев Ю.В. Феррозондовые приборы. - Л.: Энергоатомиздат, 1986.
Изобретение относится к области магнитоизмерительной техники, в частности к магнитной навигации, магниторазведке, магнитному картографированию и т.д., для измерения и компенсации магнитных помех носителей или устранения магнитной девиации магнитных навигационных компасов. Техническим результатом изобретения является повышение точности и расширение технической возможности определения магнитной девиации на тяжеловесных подвижных объектах, повышение точности определения девиации при отсутствии необходимости осуществления продольных и поперечных кренов, а также определение помех не только в движении, но и в статическом - стояночном положении объекта без применения дорогостоящих поворотных немагнитных стендов. Указанный результат достигается тем, что способ предусматривает измерение проекций вектора магнитной индукции на оси опорной системы координат в двух выбранных местах пространства с существенно различными значениями вертикальной составляющей вектора индукции геомагнитного поля при отсутствии объекта, синхронные измерения проекций результирующего вектора магнитной индукции и углов поворота при трех разных значениях углов курса и при малых или равных нулю углах крена и тангажа на объекте, расположенном в указанных местах пространства, по указанным величинам определение параметров Пуассона, а затем определение магнитной девиации. 1 ил.
Способ определения магнитной девиации на подвижном объекте в точке координат, жестко связанной с системой координат объекта, основанный на измерениях в выбранном месте пространства при отсутствии подвижного объекта магнитной индукции, как проекции ее вектора на оси опорной системы координат, размещении подвижного объекта в упомянутом месте пространства, изменении углов курса объекта относительно опорной системы координат, синхронном измерении этих углов и проекций векторов магнитной индукции на объекте на оси системы координат объекта, при трех различных значениях угла курса, отличающийся тем, что затем осуществляют измерение при отсутствии подвижного объекта магнитной индукции, как проекции ее вектора на оси опорной системы координат, по крайней мере, в одном другом выбранном месте пространства (например на другой географической широте или в аномальных полях) с другим существенно отличающимся значением проекции вектора магнитной индукции на вертикальную ось опорной системы координат по сравнению с соответствующей проекцией первого места пространства, размещают подвижный объект в данном месте пространства, затем, по крайней мере, на одном из установленных и измеренных курсов объекта относительно опорной системы координат измеряют проекции вектора магнитной индукции на объекте на оси системы координат объекта, причем все вышеупомянутые измерения проекций векторов магнитной индукции на объекте в обоих местах пространства осуществляют при малых или равных нулю (полетных или стояночных) измеряемых углах крена и тангажа объекта и по указанным величинам, заданным в виде функций измеренных углов курса, малых углов крена и тангажа, измеренным проекциям вектора магнитной индукции магнитного поля при отсутствии объекта в первом и во втором местах пространства, определяют коэффициенты Пуассона и компоненты вектора индукции постоянного магнитного поля объекта, а затем по известным формулам определяют магнитную девиацию.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU1829578C |
| SU 1822248 A2, 20.01.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕВИАЦИИ КУРСОУКАЗАТЕЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1989 |
|
SU1633930A1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1996 |
|
RU2108546C1 |

