Изобретение относится к электроизмерительной технике и может быть использовано при построении импульсных рефлектометров.
Целью изобретения является повышение точности измерения расстояния до места повреждения путем аналого-цифрового преобразования выходнЬ1х напряжений датчиков расстояния и укорочения электромагнитных волн. .
На фиг. 1 представлена структурная схема устройства; на фиг. 2 (а-к) - временные диаграммы работы блоков устройства.
Устройство для измерения расстояния до места повреждения линий электропереУстройство работает следующим образом.
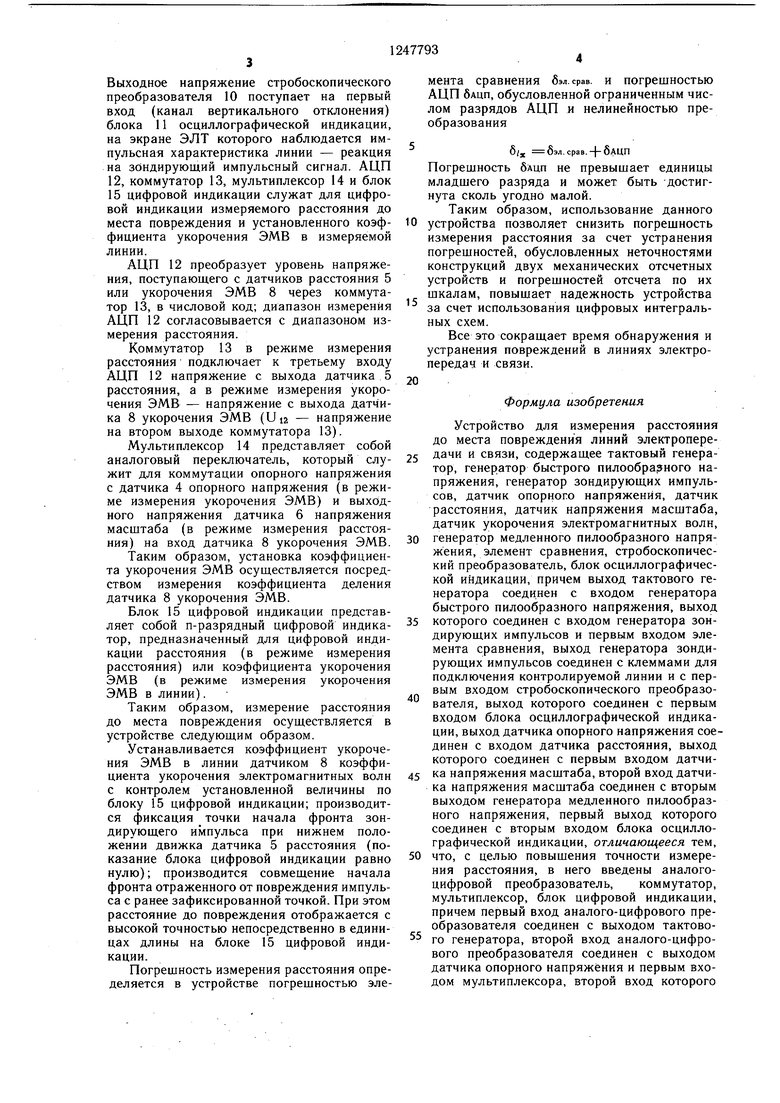
Тактовый генератор 1 вырабатывает тактовые импульсы (фиг. 2а), которые поступают на первый вход АЦП 12 и синхронизируют работу генератора 2 быстрого 5 пилообразного напряжения.
Генератор 2 быстрого пилообразного напряжения формирует линейное пилообразное напряжение U2, длительность которого определяется диапазоном измерения расстояния Q (фиг. 2,6). Это напряжение используется для запуска генератора 3 зондирующих импульсов и для формирования калиброванной задержки в элементе 9 сравнения (фиг. 2, ).
Генератор 3 зондирующих импульсов формирует зондирующие импульсы, которые
дач и связи содержит тактовый генератор 1, 15 поступают в исследуемую линию и на пер- генератор 2 быстрого пилообразного напря-вый вход стробоскопического преобразоватежения, генератор 3 зондирующих импульсов датчик 4 опорного напряжения, датчик 5 расстояния, датчик б напряжения масштаба, генератор 7 медленного пилообразного напряжения, датчик 8 укорочения электромагнитных волн , элемент 9 сравнения, стробоскопический преобразователь 10, блок 11 осциллографической индикации, аналого- цифровой преобразователь (АЦП) 12, коммутатор 13, мультиплексор 14 и блок 15 цифровой индикации.
Выход тактового генератора 1 соединен с входом генератора 2 быстрого пилообразного напряжения, выход которого соединен с первым входом элемента 9 сравнения и входом генератора 3 зондирующих импульсов, выход которого соединен с измеряемой линией и первым входом стробоскопического преобразователя 10, второй вход которого соединен с выходом элемента 9 сравнения, а выход - с первым входом блока 11 осциллографической индикации, второй вход которого соединен с первым выходом генератора 7 медленного пилообразного напряжения, второй выход которого соединен с вторым входом датчиля 10. Достигая повреждения в линии, зондирующий импульс отражается от него и начинает распространяться в обратном направлении (к точке подключения устройства). Стабильное постоянное напряжение с датчика 4 опорного напряжения, соответствующее максимальной величине измеряемого расстояния, поступает на второй вход АЦП 12, вход датчика 5 расстояния и первый вход 25 мультиплексора 14. Датчик 5 расстояния выдает постоянное стабильное напряжение.
(фиг. 2, д) величина которого устанавливается в процессе поиска повреждения от. нуля (начало линии) до максимального значения (выходного напряжения датчика 4
30 опорного напряжения). Выходное напряжение датчика 5 расстояния поступает на первый вход коммутатора 13 и первый вход датчика 6 напряжения масштаба. Датчик 6 напряжения масштаба представляет собой высокостабильный делитель, суммиру35 ющий медленное пилообразное напряжение с генератора 7 медленного пилообразного напряжения с выходным напряжением датчика 5 расстояния. Выходное напряжение датчика 6 напряжения масштаба через мулька 6 напряжения масштаба, первый вход Q типлексор 14 (фиг. 2, ж) поступает на вход
датчика 8 коэффициента укорочения ЭВМ, выходное напряжение которого в зависимости от установленного коэффициента уко.- рочения ЭВМ определяет величину прецизионной задержки (поступает на второй вход
45 элемента 9 сравнения).
Генератор 7 медленного пилообразного напряжения на первом выходе формирует напряжение Ui развертки, поступающее на второй вход (вход канала горизонтального отклонения) блока 11 осциллографической
50 индикации (фиг. 2, е).
Элемент 9 сравнения вырабатывает импульсы запуска стробоскопического преобразователя 10 в моменты равенства напряжений на его входах. Стробоскопический преобразователь 10 формирует аналоговое (трансформированное во времени) напряжение входного сигнала на первом входе путем модуляции стробимпульсов входным сигналом и их дальнейшего расширения.
которого соединен с выходом датчика 5 расстояния, вход которого соединен с выходом датчика 4 опорного напряжения, первый вход АЦП 12 соединен с выходом тактового генератора 1, второй вход АЦП 12 - с выходом датчика 4 опорного напряжения и первым входом мультиплексора 14, второй вход которого соединен с выходом датчика 6 напряжения масштаба, третий вход мультиплексора 14 соединен с первым выходом коммутатора 13, а второй выход коммутатора 13 соединен с третьим входом АЦП 12, выход которого соединен со входом блока 15 цифровой индикации, первый вход коммутатора 13 соединен с выходом датчика 5 расстояния, а второй вход коммутатора 13 - с выходом датчика 8 укорочения электромагнитных волн и вторым входом элемента 9 сравнения, выход мультиплексора 14 соединен с входом датчика 8 укорочения электромагнитных волн.
55
Устройство работает следующим образом.
Тактовый генератор 1 вырабатывает тактовые импульсы (фиг. 2а), которые поступают на первый вход АЦП 12 и синхронизируют работу генератора 2 быстрого 5 пилообразного напряжения.
Генератор 2 быстрого пилообразного напряжения формирует линейное пилообразное напряжение U2, длительность которого определяется диапазоном измерения расстояния Q (фиг. 2,6). Это напряжение используется для запуска генератора 3 зондирующих импульсов и для формирования калиброванной задержки в элементе 9 сравнения (фиг. 2, ).
Генератор 3 зондирующих импульсов формирует зондирующие импульсы, которые
5 поступают в исследуемую линию и на пер- вый вход стробоскопического преобразоватепоступают в исследуемую линию и на пер- вый вход стробоскопического преобразователя 10. Достигая повреждения в линии, зондирующий импульс отражается от него и начинает распространяться в обратном направлении (к точке подключения устройства). Стабильное постоянное напряжение с датчика 4 опорного напряжения, соответствующее максимальной величине измеряемого расстояния, поступает на второй вход АЦП 12, вход датчика 5 расстояния и первый вход мультиплексора 14. Датчик 5 расстояния выдает постоянное стабильное напряжение.
(фиг. 2, д) величина которого устанавливается в процессе поиска повреждения от. нуля (начало линии) до максимального значения (выходного напряжения датчика 4
опорного напряжения). Выходное напряжение датчика 5 расстояния поступает на первый вход коммутатора 13 и первый вход датчика 6 напряжения масштаба. Датчик 6 напряжения масштаба представляет собой высокостабильный делитель, суммирующий медленное пилообразное напряжение с генератора 7 медленного пилообразного напряжения с выходным напряжением датчика 5 расстояния. Выходное напряжение датчика 6 напряжения масштаба через мульВыходное напряжение стробоскопического преобразователя 10 поступает на первый вход (канал вертикального отклонения) блока 11 осциллографической индикации, на экране ЭЛТ которого наблюдается импульсная характеристика линии - реакция на зондирующий импульсный сигнал. АЦП 12, коммутатор 13, мультиплексор 14 и блок 15 цифровой индикации служат для цифровой индикации измеряемого расстояния до места повреждения и установленного коэффициента укорочения ЭМВ в измеряемой линии.
АЦП 12 преобразует уровень напряжения, поступающего с датчиков расстояния 5 или укорочения ЭМВ 8 через коммутатор 13, в числовой код; диапазон измерения AU,n 12 согласовывается с диапазоном измерения расстояния.
Коммутатор 13 в режиме измерения расстояния подключает к третьему входу АЦП 12 напряжение с выхода датчика 5 расстояния, а в режиме измерения укорочения ЭМВ - напряжение с выхода датчика 8 укорочения ЭМВ (Uta - напряжение на втором выходе коммутатора 13).
Мультиплексор 14 представляет собой аналоговый переключатель, который служит для коммутации опорного напряжения с датчика 4 опорного напряжения (в режиме измерения укорочения ЭМВ) и выходного напряжения датчика 6 напряжения масштаба (в режиме измерения расстояния) на вход датчика 8 укорочения ЭМВ.
Таким образом, установка коэффициента укорочения ЭМВ осуществляется посредством измерения коэффициента деления датчика 8 укорочения ЭМВ.
Блок 15 цифровой индикации представляет собой п-разрядный цифровой индикатор, предназначенный для цифровой индикации расстояния (в режиме измерения расстояния) или коэффициента укорочения ЭМВ (в режиме измерения укорочения ЭМВ в линии).
Таким образом, измерение расстояния до места повреждения осуществляется в устройстве следующим образом.
Устанавливается коэффициент укорочения ЭМВ в линии датчиком 8 коэффициента укорочения электромагнитных волн с контролем установленной величины по блоку 15 цифровой индикации; производится фиксация точки начала фронта зондирующего импульса при нижнем положении движка датчика 5 расстояния (показание блока цифровой индикации равно нулю); производится совмещение начала фронта отраженного от повреждения импульса с ранее зафиксированной точкой. При этом расстояние до повреждения отображается с высокой точностью непосредственно в единицах длины на блоке 15 цифровой индикации.
Погрешность измерения расстояния определяется в устройстве погрешностью эле5
мента сравнения бэл.срав. и погрешностью АЦП бАцп, обусловленной ограниченным числом разрядов АЦП и нелинейностью преобразования
6/3j .срав.-|-бАЦП
Погрешность бАцп не превышает единицы младшего разряда и может быть достигнута сколь угодно малой.
Таким образом, использование данного устройства позволяет снизить погрешность измерения расстояния за счет устранения погрешностей, обусловленных неточностями конструкций двух механических отсчетных устройств и погрешностей отсчета по их шкалам, повышает надежность устройства за счет использования цифровых интегральных схем.
Все это сокращает время обнаружения и устранения повреждений в линиях электропередач и связи.
0
Формула изобретения
Устройство для измерения расстояния до места повреждения линий электропере5 дачи и связи, содержащее тактовый генератор, генератор быстрого пилообразного напряжения, генератор зондирующих импульсов, датчик опорного напряжения, датчик расстояния, датчик напряжения масштаба, датчик укорочения электромагнитных волн,
0 генератор медленного пилообразного напряжения, элемент сравнения, стробоскопический преобразователь, блок осциллографической индикации, причем выход тактового генератора соединен с входом генератора быстрого пилообразного напряжения, выход
5 которого соединен с входом генератора зондирующих импульсов и первым входом элемента сравнения, выход генератора зондирующих импульсов соединен с клеммами для подключения контролируемой линии и с первым входом стробоскопического преобразователя, выход которого соединен с первым входом блока осциллографической индикации, выход датчика опорного напряжения соединен с входом датчика расстояния, выход которого соединен с первым входом датчи5 ка напряжения масщтаба, второй вход датчика напряжения масщтаба соединен с вторым выходом генератора медленного пилообразного напряжения, первый выход которого соединен с вторым входом блока осциллографической индикации, отличающееся тем,
0 что, с целью повышения точности измерения расстояния, в него введены аналого- цифровой преобразователь, коммутатор, мультиплексор, блок цифровой индикации, причем первый вход аналого-цифрового преобразователя соединен с выходом тактово го генератора, второй вход аналого-цифрового преобразователя соединен с выходом датчика опорного напряжения и первым входом мультиплексора, второй вход которого
0
соединен с выходом датчика напряжения масштаба, третий вход мультиплексора соединен с первым выходом коммутатора, второй выход коммутатора соединен с третьим входом аналого-цифрового преобразователя, выход которого соединен с входом блока цифровой индикации, первый вход ком .ЛАОЛ Ш1А11Л1
мутатора соединен с выходом датчика расстояния, второй вход коммутатора соединен с выходом датчика укорочения электромагнитных волн и вторым входом эле- мента сравнения, выход мультиплексора соединен с входом датчика укорочения электромагнитных волн.
2 Us
8
из
,vnv uiiipotKCHue от обрыва
ЛЛЛЛ.Ш.Ы .
U U I U U и,
t
Uj Uff 5 ...
...UifnpuUjif-U
t
,..Uif
t
,..Uif
и.
w
iffj -O Uпереключения мультиплекФиг. i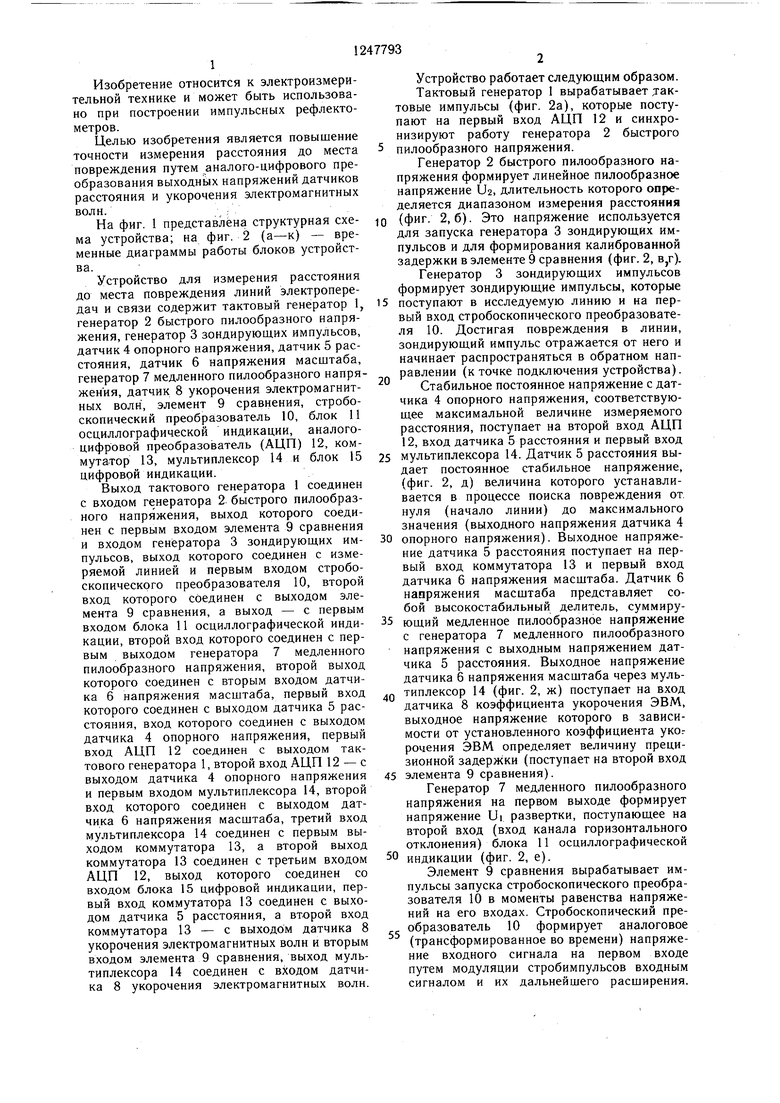

Изобретение может быть использовано при построении импульсных рефлекторов. Цель изобретения - повышение точности измерения расстояния до места повреждения. Измерение осуществляют путем установки коэффициента укорочения электромагнитных волн в линии датчиком 8 коэффициента укорочения электромагнитных волн с контролем установленной величины по блоку 15 цифровой индикации. Затем фиксируется точка начала фронта зондирующего импульса при нижнем положении движка датчика 5 расстояния и производят совмещение начала фронта отраженного от повреждения импульса с ранее зафиксированной точкой. При этом расстояние до повреждения отображается с высокой точностью непосредственно в единицах длины на блоке 15 цифровой индикации. Погрешность измерения определяется погрешностью элемента 9 сравнения и аналого-цифрового преобразователя 12, погрешность которого не превышает единицы младшего разряда и может быть достигнута сколь угодно малой. На чертеже: тактовый генератор 1, генераторы 2, 7 и 3 быстрого, медлен- ного пилообразного напряжения и зондирующих импульсов соответственно, датчики 4, 6 опорного напряжения и напряжения масштаба соответственно, стробоскопический преобразователь 10, блок 11 осциллографической индикации, коммутатор 3 и мультиплексор 14.2 ил. Пиния i (Л С 4i ;о оо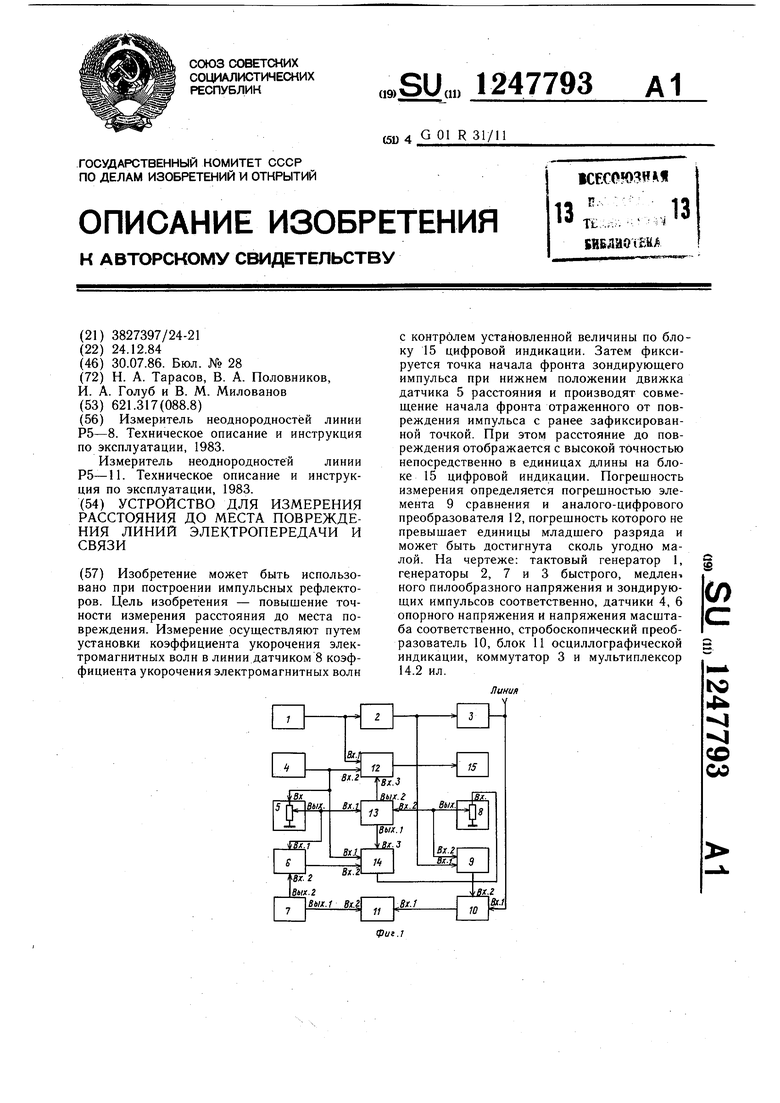
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Техническое описание и инструкция по эксплуатации, 1983 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Техническое описание и инструкция по эксплуатации, 1983. | |||
