Предложенный способ и устройство для его осуществления относятся к импульсной технике и электроизмерениям и могут быть использованы при создании приборов для автоматического определения расстояния до места обрыва и короткого замыкания в линиях электропередачи и связи, и определения их длины.
Известные способы определения расстояния до места повреждения [1, 2] основаны на локационном способе определения расстояния до места повреждения: зондировании линии импульсами напряжения, приеме отраженных импульсов, усилении их по закону, обратному закону затухания [1] фиксации времени прихода отраженных импульсов и определения расстояния до места повреждения по интервалу времени между отраженным и зондирующим импульсами, изменений масштаба задержки луча электронно-лучевой трубки в соответствии со скоростью распространения импульсов по линии [2]
Известен способ автоматического определения расстояния до места повреждения [3] воздушных линий, основанный на посылке серии из n зондирующих импульсов, усиления приходящих с линии импульсов по закону, обратному закону затухания импульсов в линии, поочередном синхронном интегрировании принятых напряжений в m независимых цепочках, соответствующих участкам линии за n циклов зондирования, выборе одной из (m-1) цепочек, в которой проинтегрированное напряжение максимально, и определении расстояния по номеру этой цепочки.
Известно устройство [4] дальномер, построенный по принципу счета импульсов эталонной частоты, стабилизированной кварцем, интервал между которыми соответствует определенной дальности (заданной абсолютной погрешности); при этом сосчитанное количество импульсов в интервале времени между зондирующим и отраженным сигналом представляется двоичным кодом и преобразуется в напряжение, соответствующее этому коду.
Известно устройство для определения расстояния до места повреждения в линиях электропередачи и связи [5, 6] основанное на локационном методе определения расстояния до места повреждения: в линию посылают зондирующие сигналы, принимают отраженные от неоднородностей волнового сопротивления и повреждения сигналы и определяют место повреждения по временной задержке отраженных импульсов относительно зондирующих.
Зондирующие и отраженные сигналы поступают в стробоскопический преобразователь, преобразуются в аналоговый сигнал, который регистрируется на экране электронно-лучевой трубки в виде импульсной характеристики линии.
Информация с временной задержке отраженных импульсов относительно зондирующего импульса с учетом коэффициента укорочения электромагнитных волн в линии при ручном совмещении фронта зондирующего и отраженного сигналов на экране электронно-лучевой трубки с помощью датчиков расстояния и укорочения преобразуется в блоке цифровой индикации в информацию о расстоянии или коэффициенте укорочения импульсов в линии.
Наиболее близким по технической сущности к предлагаемому способу и устройству является способ, реализуемый устройством для измерения расстояния до места повреждения линий электропередачи и связи, и это устройство - прототип [5, 6]
Этот способ основан на зондировании объекта измерения импульсами напряжения, приеме отраженных сигналов, фиксации времени прихода импульса, отраженного от места повреждения, стробоскопическом преобразовании импульсных сигналов, анализе аналоговой импульсной характеристики и определении расстояния до места повреждения по интервалу времени между моментом воздействия зондирующим импульсом и моментом прихода отраженного от повреждения импульса.
Устройство, осуществляющее этот способ, содержит тактовый генератор, генератор быстрого пилообразного напряжения, генератор зондирующих импульсов, датчик опорного напряжения, датчик напряжения масштаба, генератор медленного пилообразного напряжения, датчик укорочения, элемент сравнения, стробоскопический преобразователь, блок осциллографической индикации, аналого-цифровой преобразователь, коммутатор, мультиплексор и блок цифровой индикации.
Это устройство и реализуемый им способ имеют следующие недостатки:
1) Снижение точности измерения за счет использования электронно-лучевого индикатора;
2) Необходимость анализа импульсной характеристики для выделения повреждений;
3) Ограничение области применения ограничение типов измеряемых линий по коэффициенту укорочения.
Первый недостаток объясняется тем, что электронно-лучевой индикатор ухудшает потенциальную точность устройства, внося дополнительные ошибки в измерения, определяемые масштабом шкалы, масштабом развертки, степенью освещенности, качеством фокусировки, толщиной линии при совмещении и т.д.
Второй недостаток объясняется тем, что для выделения полученного сигнала (отражения от повреждения) на фоне отражений от муфт и неоднородностей волнового сопротивления, переотражений от неполного согласования волнового сопротивления с выходным сопротивлением генератора зондирующих сигналов, необходим анализ импульсной характеристики оператором высокой квалификации; при этом необходимы просмотр всего диапазона измерения, правильный выбор вида и длительности зондирующего сигнала, согласование выходного сопротивления устройства с волновым сопротивлением линии, выбор режима развертки блока осциллографической индикации.
Анализ импульсной характеристики совершенно необходим при поиске сложных повреждений, когда отраженный сигнал от повреждения неразличим на фоне сигналов, перечисленных выше; однако при поиске простых повреждений типа "обрыв" или "короткое замыкание", отражение от которых имеет максимальную амплитуду, проведение операции анализа импульсной характеристики снижает быстродействие устройства.
Третий недостаток обусловлен способом цифрового отсчета расстояния с помощью калиброванной задержки стробимпульсов, при котором одно и то же опорное напряжение, равное максимальному входному напряжению АЦП  , преобразуется в напряжения расстояния, укорочения и временной интервал задержки стробирования.
, преобразуется в напряжения расстояния, укорочения и временной интервал задержки стробирования.
При этом в качестве измеряемого расстояния индицируется опорное напряжение, изменяемое в процессе поиска повреждения с помощью датчика расстояния, от нуля до максимального значения 
В качестве коэффициента укорочения индицируется то же опорное напряжение, устанавливаемое или изменяемое с помощью датчика укорочения от величины, равной единице, до максимального значения, равного  . Например, при
. Например, при  1,999 В; γmax 1,999.
1,999 В; γmax 1,999.
Целью изобретения является повышение точности и быстродействия определения расстояния в линиях со значительными неоднородностями, расширение области применения по коэффициенту укорочения измеряемых линий.
Цель достигается тем, что в известном способе измерения расстояния до места повреждения линий электроперадачи и связи, основанном на зондировании входа объекта измерения импульсами напряжения, приеме отраженных импульсов и усиления их по закону, обратному закону измерения затухания импульсов, фиксации времени прихода импульса, отраженного от места повреждения или разомкнутого или короткозамкнутого конца линии и определении расстояния до места повреждения или до конца линии по интервалу времени между моментом зондирования и моментом прихода отраженного импульса:
преобразуют разнополяные импульсы, отраженные от обрыва и короткого замыкания, в однополярные импульсы;
формируют однополярное, медленно падающее, пилообразное пороговое напряжение;
сравнивают пороговое напряжение с амплитудой преобразованного отраженного импульса и в момент их равенства фиксируют время прихода отраженного импульса;
формируют опорное напряжение и преобразуют его в напряжение укорочения с коэффициентом деления, равным отношению максимального коэффициента укорочения к установленному коэффициенту укорочения в измеряемой линии;
преобразуют временной интервал между моментом прихода отраженного импульса и моментом зондирования в напряжение расстояния с коэффициентом деления, равным установленному коэффициенту укорочения в измеряемой линии.
Указанная цель достигается тем, что в известном устройстве для измерения расстояния до места повреждения линий электропередач, содержащем тактовый генератор, генератор зондирующих импульсов, элемент сравнения, датчик расстояния, датчик укорочения, коммутатор, аналого-цифровой преобразователь и блок цифровой индикации, вход которого подключен к выходу аналого-цифрового преобразователя:
генератор зондирующих сигналов выполнен с возможностью выработки импульсов заданной длительности для функционального изменения порогового напряжения в начальный момент цикла измерения расстояния на первом выходе,
тактовый генератор выполнен с возможностью выработки импульсов, длительность которых пропорциональна максимальному измеряемому расстоянию на каждом диапазоне измерения на первом и втором выходах, и счетных импульсов, количество которых пропорционально измеряемому расстоянию, на третьем выходе,
первый коммутатор выполнен с возможностью преобразования однополярного зондирующего сигнала в прямой и инверсный на первом выходе, с возможностью трансформации и коммутации прямого и инверсного отраженных сигналов с первого выхода на второй и третий выходы и коммутации усиленных отраженных сигналов со второго входа на второй выход,
датчик расстояния выполнен с возможностью преобразования счетных импульсов на первом входе в аналоговое напряжения, пропорциональное времени задержки отраженных импульсов на выходе,
датчик укорочения выполнен с возможностью преобразования опорного напряжения, пропорционального заданному максимальному коэффициенту укорочения, в напряжение укорочения, пропорциональное установленному коэффициенту укорочения, и преобразования аналогового напряжения, пропорционального времени задержки отраженных импульсов на первом входе в напряжение, пропорциональное расстоянию до повреждения на выходе, с возможностью их коммутации по второму и третьему входам,
в него введены:
второй коммутатор, выполненный с возможностью формирования управляющего напряжения и коммутации его на первый или второй выход,
функциональный приемник, выполненный с возможностью непрерывного изменения коэффициента усиления принимаемого сигнала по первому входу в каждом цикле измерения по закону, обратному экспоненциальному закону изменения затухания импульса в линии, возможностью управления изменением коэффициента усиления в каждом цикле по второму входу и возможностью расщепления усиленного сигнала на прямой и инверсный на выходе,
детектор, выполненный с возможностью преобразования прямого и инверсного входного сигнала в положительный на выходе,
формирователь порогового напряжения,
формирователь импульсов начала и окончания счета с возможностью выработки импульсов начала счета на первом выходе и импульсов окончания счета на втором и третьем выходах,
формирователь импульсов записи и обнуления с возможностью выработки импульсов обнуления на первом выходе и импульсов записи на втором и третьем выходах,
первый и второй выходы которого соединены соответственно со вторым и третьим выходами датчика расстояния, третий выход соединен с вторым входом формирователя порогового напряжения, а вход соединен с вторым выходом формирователя импульсов начала и окончания счета, первый выход которого соединен с входом тактового генератора, третий выход соединен с первым входом формирователя порогового напряжения, первый вход соединен с вторым выходом тактового генератора, а второй вход соединен с выходом элемента сравнения, первый вход которого соединен с выходом формирователя порогового напряжения, а второй вход соединен с выходом детектора, симметричный вход которого соединен с вторым симметричным выходом первого коммутатора, первый симметричный выход которого соединен с объектом измерения, третий выход соединен с первым входом функционального приемника, первый вход соединен с вторым выходом генератора зондирующих импульсов, а второй симметричный вход соединен с симметричным входом функционального приемника, второй вход которого соединен с первым выходом тактового генератора и входом генератора зондирующих импульсов, первый выход которого соединен с третьим входом формирователя порогового напряжения, третий выход тактового генератора соединен с первым входом датчика расстояния, выход которого соединен с первым входом датчика укорочения, второй и третий входы которого соединены с первым и вторым выходами второго коммутатора соответственно, а выход соединен с входом аналого-цифрового преобразователя, при этом тактовый генератор содержит генератор с кварцевой стабилизацией частоты, делитель частоты и мультиплексор диапазонов, первый вход которого соединен с выходом генератора и входом делителя частоты, второй вход соединен с входом тактового генератора, а выход соединен с третьим выходом тактового генератора, первый и второй выходы которого соединены с соответствующими выходами делителя частоты;
при этом, первый коммутатор содержит симметрирующий трансформатор и переключатель, первый и второй выводы которого соединены соответственно с пятым и восьмым выводами трансформатора, четвертый, шестой и седьмой выводы которого соединены с корпусом устройства, третий вывод соединен с первым входом первого коммутатора, первый симметричный выход которого соединен с первым и вторым выводами трансформатора, пятый вывод которого соединен с третьим выходом первого коммутатора, второй симметричный вывод которого соединен с пятым и шестым выводами переключателя, третий и четвертый выводы которого соединены с вторым симметричным входом первого коммутатора;
при этом датчик расстояния содержит счетчик и последовательно соединенные регистр, цифроаналоговый преобразователь и операционный усилитель, выход которого соединен с выходом датчика расстояния, первый вход которого соединен с первым входом счетчика, второй вход которого соединен с вторым входом датчика расстояния, третий вход которого соединен с вторым входом регистра, первый вход которого соединен с выходом счетчика;
при этом формирователь порогового напряжения содержит последовательно соединенные счетчик, цифроаналоговый преобразователь, операционный усилитель и эмиттерный повторитель, выход которого соединен с выходом формирователь порогового напряжения, первый и второй входы которого соединены с входами счетчика, а третий вход соединен с вторым входом эмиттерного повторителя;
при этом функциональный приемник содержит дифференциальный усилитель, генератор экспоненциального напряжения и одновибратор, вход которого соединен с вторым входом функционального приемника, первый вход которого соединен с первым входом дифференциального усилителя, второй вход которого соединен с выходом генератора экспоненциального напряжения, вход которого соединен с выходом одновибратора, а выход функционального приемника соединен с выходом дифференциального усилителя;
при этом датчик укорочения содержит датчик опорного напряжения, четырехканальный аналоговый коммутатор, первый, второй и третий резисторы, причем второй вывод третьего резистора соединен с корпусом устройства, а первый вывод соединен с третьим и вторым выводами второго резистора, первый вывод которого соединен с выводом А3 аналогового коммутатора и третьим выводом первого резистора, второй вывод которого соединен с выводами А2 и В4 аналогового коммутатора, а первый вывод соединен с выводом В1 аналогового коммутатора, вывод А4 которого соединен с выходом датчика опорного напряжения, выводы В2, В3 аналогового коммутатора соединены с выходом датчика укорочения, первый вход которого соединен с выводом А1 аналогового коммутатора, разрешающие входы первого и второго каналов которого V1, 2 соединены с вторым входом датчика укорочения, третий вход которого соединен с разрешающими входами третьего и четвертого каналов V3, 4 аналогового коммутатора.
Сопоставительный анализ с прототипом показывает, что заявленное решение соответствует критерию изобретения "новизна".
При изучении других известных решений в данной области техники признаки, отличающие заявленное решение от прототипа, не были выявлены, и потому они обеспечивают заявленному техническому решению соответствие критерию "существенные отличия".
Сущность изобретения заключается в автоматическом измерении расстояния с заданной точностью до конца линии или повреждения независимо от вида повреждения: "обрыв" или "короткое замыкание". Устройство автоматически анализирует отраженные сигналы по максимуму амплитуды и выдает одинаковые результаты об измеренном расстоянии независимо от полярности отраженного сигнала с учетом установленного коэффициента укорочения.
Погрешность измерения расстояния определяется погрешностью частоты кварцевого генератора в тактовом генераторе и погрешностью снятия цифрового отсчета. По сравнению с прототипом исключаются погрешности нелинейности и крутизны быстрого пилообразного напряжения и визуальная погрешность совмещения фронтов зондирующего и отраженного сигнала на экране электронно-лучевой трубки.
На фиг. 1 представлено устройство, реализующее предложенный способ; на фиг. 2-7 примеры реализации тактового генератора, датчика расстояния, датчика укорочения, формирователя порогового напряжения, функционального приемника и первого коммутатора; на фиг. 8-9 работа датчика укорочения в двух режимах: режиме установки и измерения коэффициента укорочения (фиг. 8); режиме измерения расстояния при установленном коэффициенте укорочения (фиг. 9); на фиг. 10 временные диаграммы работы блоков устройства.
Устройство (фиг. 1) содержит: ГЗИ генератор зондирующих импульсов 1, ТГ тактовый генератор 2, ФИНОС формирователь импульсов начала и окончания счета 3, К1 первый коммутатор 4, ДР датчик расстояния 5, ФИЗО - формирователь импульсов записи и обнуления 6, ФПН формирователь порогового напряжения 7, ФП функциональный приемник 8, ДУ датчик укорочения 9, К2 - второй коммутатор 10, ЭС элемент сравнения 11, Д детектор 12, АЦП - аналого-цифровой преобразователь 13, ВЦИ блок цифровой индикации 14.
Вход генератора зондирующих импульсов 1 подключен к первому выходу тактового генератора 2, первый выход подключен к третьему входу формирователя порогового напряжения 7, второй выход к первому входу первого коммутатора.
Вход тактового генератора 2 подключен к первому выходу формирователя импульсов начала и окончания счета 3, первый выход подключен к входу генератора зондирующих импульсов 1 и к второму входу функционального приемника 8, второй выход подключен к первому входу формирователя импульсов начала и окончания счета 3, третий выход к первому входу датчика расстояния 5.
Первый вход формирователя импульсов начала и окончания счета 3 подключен к второму выходу тактового генератора 2, второй вход подключен к выходу элемента сравнения 11, первый выход к входу тактового генератора 2, второй выход к входу формирователя импульсов записи и обнуления 6, третий выход к первому входу формирователя порогового напряжения 7.
Первый вход первого коммутатора 4 подключен к второму выходу генератора зондирующих импульсов 1, второй симметричный вход подключен к выходу функционального приемника 8, первый симметричный выход подключен к объекту измерения, второй симметричный выход подключен ко входу детектора 12, третий выход подключен к первому входу функционального приемника 8.
Первый вход датчика расстояния 5 подключен к третьему выходу тактового генератора 2, второй и третий входы подключены к первому и второму выходам формирователя импульсов записи и обнуления 6, а выход к первому входу датчика укорочения 9.
Вход формирователя импульсов записи и обнуления 6 соединен с вторым выходом формирователя импульсов начала и окончания счета 3, первый и второй выходы к второму и третьему входам датчика расстояния 5, а третий выход ко второму входу формирователя порогового напряжения 7.
Первый вход формирователя порогового напряжения 7 подключен к третьему выходу формирователя импульсов начала и окончания счета 3, второй вход к третьему выходу формирователя импульсов записи и обнуления 6, третий вход к первому выходу генератора зондирующих импульсов 1, а выход к первому входу элемента сравнения 11.
Первый вход функционального приемника 8 подключен к третьему выходу первого коммутатора 4, второй вход к первому выходу тактового 2 и входу генератора зондирующих импульсов 1, а симметричный выход к второму входу первого коммутатора 4.
Первый вход датчика укорочения 9 подключен к выходу датчика расстояния 5, второй и третий входы и первому и второму выходу соответственно второго коммутатора 10, а выход к входу аналого-цифрового преобразователя 13.
Первый и второй выходы второго коммутатора 10 подключены соответственно к второму и третьему входам датчика укорочения 9.
Первый вход элемента сравнения 11 подключен к выходу формирователя порогового напряжения 7, второй вход к выходу детектора 12, а выход к второму входу формирователя импульсов начала и окончания счета 3.
Симметричный вход детектора 12 подключен к второму выходу первого коммутатора, а выход к второму входу элемента сравнения 11.
Вход аналого-цифрового преобразователя 13 подключен к выходу датчика укорочения, а выход ко входу блока цифровой индикации 14.
Вход блока цифровой индикации 14 подсоединен к выходу аналого-цифрового преобразователя 13.
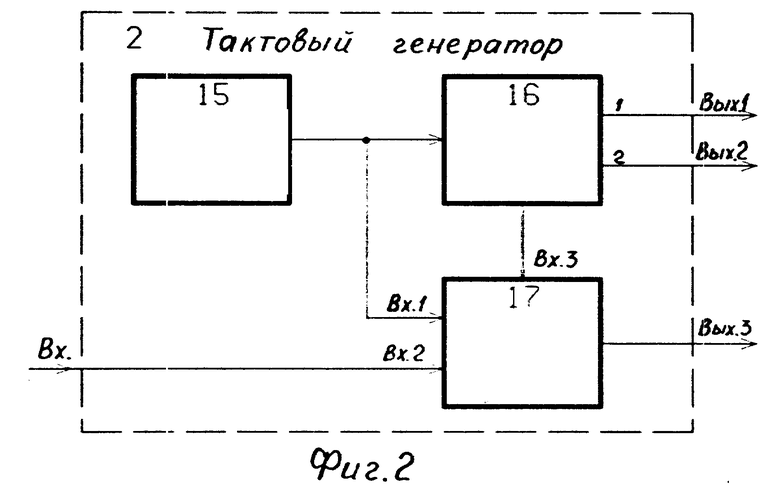
Тактовый генератор 2 (фиг. 1) выполнен в соответствии со структурной схемой (фиг. 2) и состоит из генератора с кварцевой стабилизацией частоты 15, делителя частоты 16 и мультиплексора диапазонов 17, второй вход которого соединен с входом тактового генератора, выход с третьим выходом тактового генератора, а первый вход с выходом кварцевого генератора 15 и входом делителя частоты 16, выходы которого соединены с первым и вторым выходами тактового генератора и третьим входом мультиплексора диапазонов.
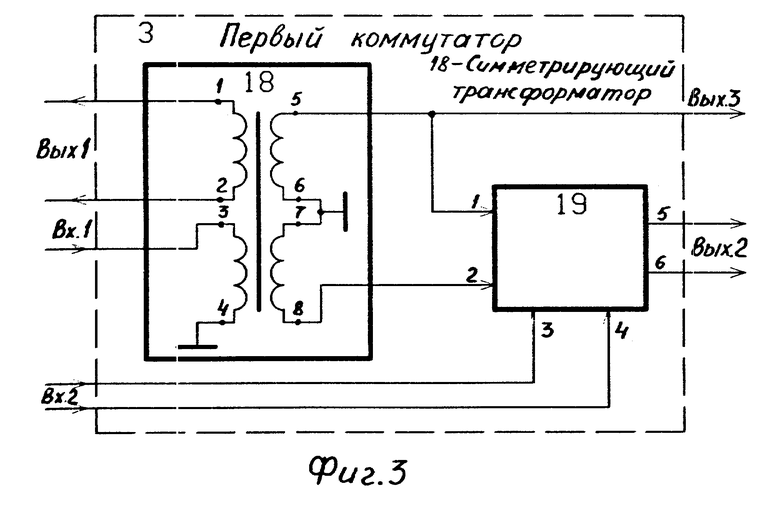
Первый коммутатор 4 (фиг. 1) выполнен в соответствии со структурной схемой (фиг. 3) и состоит из симметрирующего трансформатора 18 и переключателя 19, пятый и шестой выводы которого соединены с вторым выходом первого коммутатора, третий и четвертый выводы с вторым входом первого коммутатора, а первый и второй выводы с пятым и восьмым выводами симметрирующего трансформатора 18, пятый вывод которого соединен с третьим выходом первого коммутатора, четвертый, шестой и седьмой выводы с корпусом устройства, третий вывод с первым входом первого коммутатора, а первый и второй выводы - с первым выходом первого коммутатора.
Датчик расстояния 5 (фиг. 1) выполнен в соответствии со структурной схемой (фиг. 4) и состоит из счетчика 20, регистра 21, цифроаналогового преобразователя 22, операционного усилителя 23, выход которого соединен с выходом датчика расстояния, а вход с выходом цифро-аналогового преобразователя 22, вход которого соединен с выходом регистра 21, второй вход которого соединен с третьим входом датчика расстояния, а первый вход с выходом счетчика 20, первый вход которого соединен с первым входом датчика расстояния, а второй вход с вторым входом датчика расстояния.
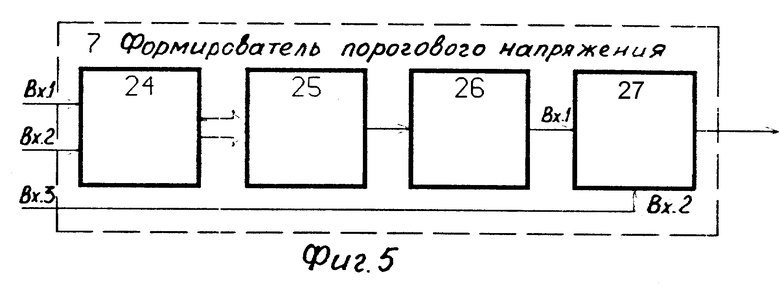
Формирователь порогового напряжения ФПН 7 (фиг. 1) выполнен по структурной схеме (фиг. 5) и состоит из счетчика 24, цифроаналогового преобразователя 25, операционного усилителя 26 и эмиттерного повторителя 27, выход которого соединен с выходом ФПН, второй вход с третьим входом ФПН, а первый вход с выходом операционного усилителя 26, вход которого соединен с выходом цифроаналогового преобразователя, вход которого соединен с выходом счетчика 24, первый и второй входы которого соединены соответственно с первым и вторым входом формирователя порогового напряжения.
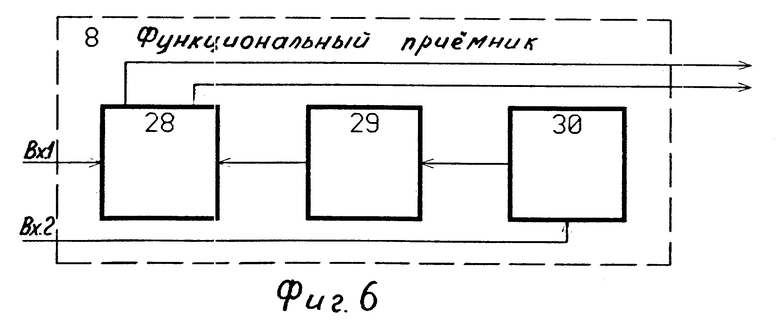
Функциональный приемник ФП 8 (фиг. 1) выполнен по структурной схеме (фиг. 6) и состоит из дифференциального усилителя 28, генератора экспоненциального напряжения 29 и одновибратора 30, вход которого соединен с вторым входом ФП, а выход с входом генератора экспоненциального напряжения 29, выход которого соединен с вторым входом дифференциального усилителя 28, первый вход которого соединен с первым входом ФП, а симметричный выход с выходом ФП.
Датчик укорочения 9 (фиг. 1) выполнен по структурной схеме (фиг. 7) и состоит из датчика опорного напряжения 31, четырехканального аналогового коммутатора 32 и трех резисторов R1, R2, R3, соедененных последовательно, причем второй вывод R3 соединен с корпусом устройства, а первый вывод с третьим и вторым выводами резистора R2, первый вывод которого соединен с выводом А3 аналогового коммутатора 32 и третьим выводом резистора R1, второй вывод которого соединен с выводами A2 и B4 аналогового коммутатора 32, вывод B1 которого соединен с первым выводом резистора R1, вывод A4 с выходом датчика опорного напряжения, вывод A1 с входом ДУ, выводы B2, B3 с выходом ДУ, а второй и третий входы ДУ соединены соответственно с входами разрешения V1, 2 и V3, 4 аналогового коммутатора 32.
Устройство работает следующим образом. Второй коммутатор 10 устанавливает два режима работы устройства: режим определения места повреждения (вых. 1) режим установки коэффициента укорочения электромагнитной волны в линии электропередачи (вых. 2).
В режиме установки коэффициента укорочения напряжения датчика опорного напряжения 31 (фиг. 8а) Uоп датчика укорочения 9 через открытый по третьему входу ДУ канал A4-B4 аналогового коммутатора 32 поступает на второй вывод резистора установки коэффициента укорочения R1, а напряжение, пропорциональное коэффициенту укорочения Uгаммауст поступает на аналого-цифровой преобразователь 13 с делителя, образуемого резисторами R1, R2, R3 через канал A3-B3 аналогового коммутатора 32.
Диапазон изменения устанавливаемых или измеряемых коэффициентов укорочения от γmax до γmin = 1
Подстроечным резистором R2 устанавливают сопротивление:
Максимальное напряжение укорочения (в нижнем положении движка R1), соответствующее максимальному коэффициенту укорочения γmax равно опорному напряжению:
Максимальное напряжение укорочения (в верхнем положении движка R1), соответствующее минимальному коэффициенту укорочения γmin = 1 равно:
Напряжение укорочения, соответствующее коэффициенту укорочения в линии (в положении движка  равно (фиг. 8б):
равно (фиг. 8б):
т. е. коэффициент деления опорного напряжения равен величине  - отношению максимального коэффициента укорочения к установленному коэффициенту укорочения в измеряемой линии.
- отношению максимального коэффициента укорочения к установленному коэффициенту укорочения в измеряемой линии.
Так как цифровой отсчет величины Uγ=1 должен быть равен 1, то величина Uγ=1 может быть равна 1, 100 мВ, при этом величина опорного напряжения должна быть Uоп = γmax•Uγ=1. По сравнению с прототипом, Uоп гораздо меньше, чем  , что позволяет в несколько раз расширить диапазон устанавливаемых или измеряемых коэффициентов укорочения. На фиг. 8б показан диапазон изменения напряжения укорочения при γmax = 4
, что позволяет в несколько раз расширить диапазон устанавливаемых или измеряемых коэффициентов укорочения. На фиг. 8б показан диапазон изменения напряжения укорочения при γmax = 4
Аналого-цифровой преобразователь 13, представляющий собой вольтметр, преобразует напряжение, пропорциональное коэффициенту укорочения в цифровой код, который отображается блоком цифровой индикации 14.
Блок цифровой индикации, содержащий жидкокристаллический индикатор со схемой зажигания децимальной точки, индицирует установленный коэффициент укорочения.
В режиме установки коэффициента укорочения работают только датчик укорочения 9, второй коммутатор 10, аналого-цифровой преобразователь 13, блок цифровой индикации 14.
В режиме определения места повреждения работают все блоки структурной схемы, приведенной на фиг. 1, а в датчике укорочения 9 открываются каналы A1-B1, A2-B2 по второму входу ДУ, при этом на первый вывод R1 датчика укорочения поступает напряжение с датчика расстояния Ut3 (фиг. 9а).
При этом кварцевый генератор 15 тактового генератора 2 вырабатывает тактовые (счетные) импульсы, поступающего на вход делителя частоты 16 и первый вход мультиплексора диапазонов 17;
делитель частоты 16 формируют импульсы запуска генератора зондирующих импульсов 1 и одновибратора 30 функционального приемника 8 (выход 1), импульсы запуска формирователя импульсов начала и окончания счета 3 (выход 2);
период следования этих импульсов Tп (фиг. 10а) зависит от установленного диапазона измерения расстояния;
счетные импульсы проходят на вход датчика расстояния по третьему выходу тактового генератора 2 через мультиплексор диапазонов 17 (фиг. 10ж), который открывается импульсами формирователя начала и окончания импульсов счета 3 (фиг. 10д), поступающими на вход тактового генератора.
Генератор зондирующих импульсов 1 вырабатывает зондирующие импульсы ЗИ с заданной длительностью (выход 2) и импульсы для функционального изменения порогового напряжения в начальной момент цикла изменения расстояния (выход 1) в формирователе порогового напряжения 7 (вход 3).
Первый коммутатор 4 осуществляет преобразование несимметричного выхода ГЗИ1 в симметричный, коммутацию зондирующих и отраженный импульсов на объект измерения и вход функционального приемника, а также коммутацию отраженных импульсов непосредственно с симметричного выхода симметрирующего трансформатора 18 и усиленных отраженных импульсов с выхода функционального приемника 8 (вход 2) через переключатель 19 на вход детектора 12 (выход 2). Отраженный от неоднородности импульс ОИ приходит через первый выход первого коммутатора на симметрирующий трансформатор 18, где происходит его преобразование на прямой и инверсный.
Детектор 12 преобразует прямой и инверсный двуполярный входной сигнал в положительный (фиг. 10б), который поступает на второй вход элемента сравнения 11. При превышении по амплитуде входным сигналом опорного уровня (фиг. 10в) формируется на выходе элемента сравнения 11 сигнал, формирующий импульс окончания счета в формирователе импульса начала и окончания счета 3 (вход 2), запрещая прохождение тактовых счетных импульсов на датчик расстояния 7 (фиг. 10е). Количество подсчитанных импульсов соответствует расстоянию до места повреждения или конца линии (фиг. 10ж). Одновременно запускается формирователь импульсов записи и обнуления 6 (фиг. 10г), на первом выходе которого формируется импульс обнуления счетчика 20 (фиг. 10и), на втором выходе
импульс записи в регистр 21 (фиг. 10з) датчика расстояния 5.
Цифроаналоговый преобразователь 22 датчика расстояния преобразует двоичный код, запомненный в регистре 21 ДР5 в аналоговый сигнал Ut3 (фиг. 9а), который с выхода операционного усилителя 23 поступает на вход аналогового коммутатора 32 датчика укорочения 9 (канал A1-B1).
Аналоговый сигнал Ut3 через резистивный делитель R1, R2, R3 датчика укорочения Д9 (фиг. 10а), установленный ранее с заданным коэффициентом деления, соответствующим коэффициенту укорочения γуст для данного типа кабеля, преобразуется в напряжение:
Напряжение  (фиг. 9б) поступает через канал A2-B2 аналогового коммутатора 32 на вход аналого-цифрового преобразователя 13 и далее на блок цифровой индикации 14, на котором отображается расстояние l до места повреждения:
(фиг. 9б) поступает через канал A2-B2 аналогового коммутатора 32 на вход аналого-цифрового преобразователя 13 и далее на блок цифровой индикации 14, на котором отображается расстояние l до места повреждения:
где c скорость электромагнитных волн при g -1.
Одновременно с обнулением счетчика 20 ДР5 на вход разрешения (вход 2) загрузки счетчика 24 формирователя порогового напряжения 7 приходит сигнал разрешения. На выходах счетчика 20 устанавливается высокий уровень, преобразуемый цифроаналоговым преобразователем 25 совместно с операционным усилителем 26 в аналоговый сигнал, поступающий на первый вход эмиттерного повторителя 27, выходное напряжение которого поступает на опорный вход элемента сравнения 11 (вход 1).
Функциональное изменение порогового напряжения создается по входу 3 ФПН 7 для исключения срабатывания элемента сравнения сразу после зондирующего импульса.
В последующем цикле измерения расстояния на опорном входе элемента сравнения 11 устанавливается максимальный уровень (фиг. 10в).
Если отраженный сигнал не превышает установленного порога, то по истечению разрешенного периода счета (фиг. 10д), сигнал записи в регистр 21 ДР5 не вырабатывается.
Одновременно с обнулением счетчика 20 датчика расстояния 5 уменьшается на единицу код в счетчике 24 формирователя порогового напряжения 7 (вход 2) и в следующем цикле измерения расстояния опорный уровень сигнала на элементе сравнения будет уменьшен на один дискрет (фиг. 10в). Уменьшение порога будет происходить с каждым циклом измерения до момента сравнения.
Для измерения расстояния в протяженных кабелях или в кабелях с большим затуханием импульсного сигнала первым коммутатором 4 включается функциональный приемник 8, непрерывно изменяющий во времени коэффициент усиления в каждом цикле измерения по закону, обратному закону изменения затухания импульса. При этом входной сигнал с трансформатора 18 первого коммутатора 4 (выход 3) поступает на первый вход дифференциального усилителя 28 функционального приемника 8. Одновременно с запуском генератора зондирующих импульсов запускается одновибратор 30 (вход 2) функционального приемника 8, формирующий импульс запуска генератора экспоненциального пилообразного напряжения 29, формирующего экспоненциально уменьшающееся напряжение во время цикла измерения на втором входе дифференциального усилителя 28; расщепленный по фазам усиленный отраженный сигнал с выхода дифференциального усилителя 28 функционального приемника 8 через первый коммутатор K1 в режиме усиления поступает на детектор 12, преобразующий двуполярный входной сигнал в положительную область однополярный отраженный сигнал, поступающий на второй вход элемента сравнения.
Предлагаемый способ определения места повреждения и устройство для его осуществления реализован в структурной схеме локационного определителя дефектов линий "Рейс-1". В настоящее время производство этого прибора освоено НПП "СТЭЛЛ" и предполагается освоение производства этого прибора Брянским АООТ "Электроаппарат".
Были проведены линейные испытания прибора, показавшие высокую точность измерений повреждений типа "обрыв" и "короткое замыкание" при высокой производительности за счет автоматизации измерений и исключения операции анализа импульсной характеристики линии.
Использование предлагаемого способа и устройства для его осуществления обеспечивает по сравнению с существующим следующие преимущества:
высокую точность измерения длин кабелей и определения расстояния до месть повреждений типа "обрыв" и "к.з." в линиях электропередачи и связи;
расширение области применения по коэффициенту укорочения измеряемых линий;
повышение быстродействия определения мест простых повреждений за счет исключения трудоемкой операции анализа импульсной характеристики на экране электронно-лучевой трубки;
снижение массы и габаритов устройства, упрощение эксплуатации за счет сокращения органов управления при поиске повреждения и исключения блока осциллографической индикации.
Эти преимущества приводят к сокращению времени поиска повреждений, и, следовательно, к увеличению производительности труда при поиске и устранении повреждений, а также при измерении длин кабелей различного типа при их производстве и торговле.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ | 1996 |
|
RU2142142C1 |
| Устройство для измерения расстояния до места повреждения линий электропередачи | 2017 |
|
RU2654958C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ КАБЕЛЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ С ПОМОЩЬЮ МЕТОДА МАРКЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2215298C2 |
| ИНТЕЛЛЕКТУАЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2019 |
|
RU2712771C1 |
| Устройство для измерения расстояния до места повреждения линий электропередачи и связи | 1984 |
|
SU1247793A1 |
| Устройство для измерения расстояния до места повреждения в линиях электропередачи и связи | 1988 |
|
SU1597799A1 |
| УСТРОЙСТВО ПОИСКА И СОПРОВОЖДЕНИЯ СИГНАЛА СИНХРОНИЗАЦИИ В СПУТНИКОВЫХ СИСТЕМАХ СВЯЗИ ПО ПРИЕМУ | 1995 |
|
RU2093964C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ИЗМЕНЯЮЩЕЙСЯ ТОЛЩИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2044314C1 |
| АКУСТИЧЕСКИЙ МИКРОСКОП | 1992 |
|
RU2011194C1 |
| УСТРОЙСТВО ПОИСКА СИГНАЛА СИНХРОНИЗАЦИИ СПУТНИКОВОЙ СИСТЕМЫ СВЯЗИ | 1995 |
|
RU2093963C1 |





Сущность изобретения: осуществляют воздействие зондирующими импульсами на вход объекта измерения, прием отраженных импульсов, непрерывно усиливают эти импульсы во времени по закону, обратному закону измерения затухания импульсов. Фиксируют время прихода импульса, отраженного от места повреждения или разомкнутого, или короткозамкнутого конца линии, определяют расстояние до места повреждения или до конца по интервалу времени между моментом зондирования и моментом прихода отраженного импульса. При этом преобразуют равнополярные импульсы, отраженные от обрыва и короткого замыкания в однополярные импульсы. Формируют однополярное медленно падающее пилообразное пороговое напряжение, сравнивают пороговое напряжение с амплитудой преобразованного отраженного импульса и в момент их равенства фиксируют время прихода отраженного импульса. Формируют опорное напряжение и преобразуют его в напряжение укорочения с коэффициентом деления, равным отношению максимального коэффициента укорочения к установленному коэффициенту укорочения в измеряемой линии. Преобразуют временной интервал между моментом прихода отраженного импульса и моментом зондирования в напряжение расстояния с коэффициентом деления, равным установленному коэффициенту укорочения в измеряемой линии. 2 с. и 6 з.п. ф-лы, 10 ил.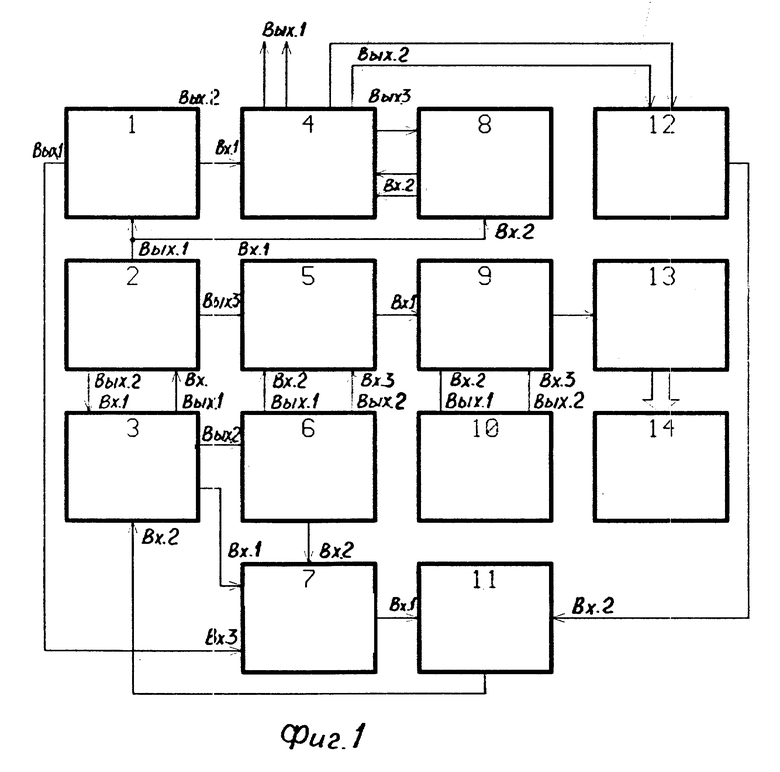
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 185405, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 215301, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 561914, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Радиолокационные устройства /Под ред | |||
| Григорина-Рябова В.В. | |||
| - М.: Советское радио, 1970, с | |||
| Прибор для исправления снимков рельефа местности | 1921 |
|
SU301A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| SU, авторское свидетельство, 1247793, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Техническое описание и инструкция по эксплуатации. | |||

