Изобретение относится к машиностроению и может использоваться для записи программы управления роботом,
Цель изобретения - повьшение точности устройства,
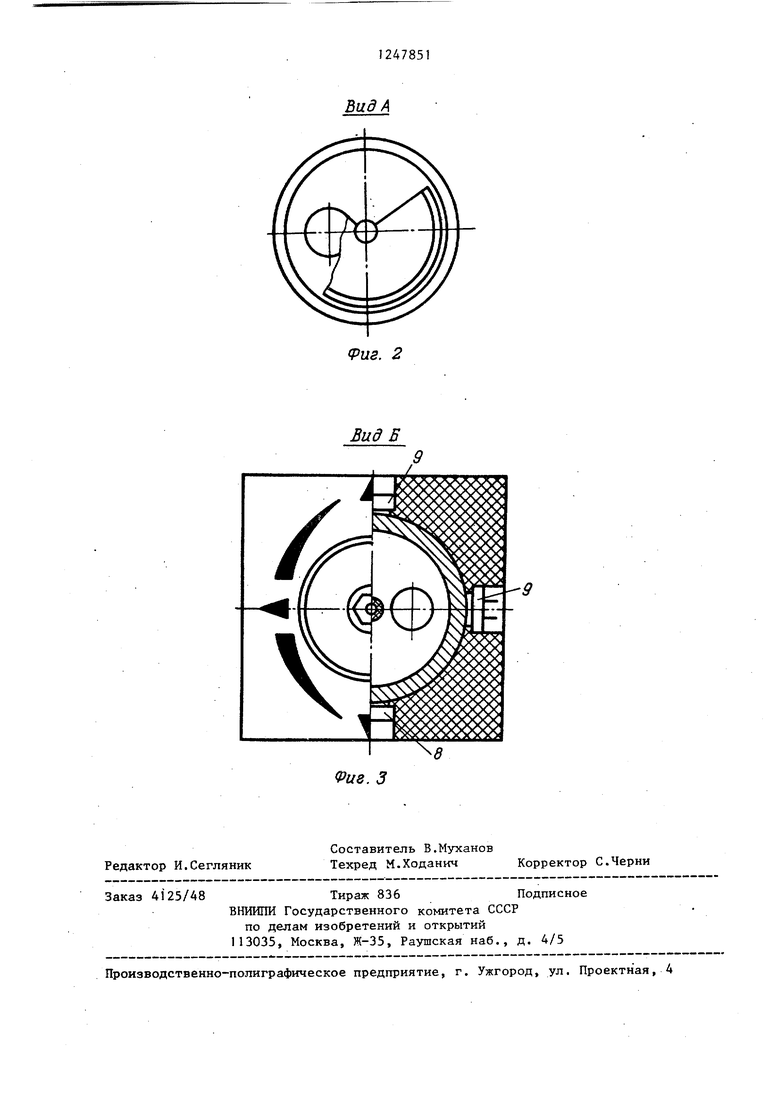
На фиг,1 изображено устройство, общий вид; на фигч2 - вид А на фиг,1 на фиг.З - вид Б на фиг.1 (с частичным вырезом),
Рукоятка обучения промышленного робота содержит рычаг 1, шарнирно установленный в корпусе 2 и сопряженный с датчиками перемещений.
Датчики перемещений состоят из установленного на нижнем конце 3 рычага 1 в центре сферического шарнира
4источника света 5, светочувствительных элементов (фоторезисторов) 6-9, установленных симметрично оси рычага 1 на внутренней поверхности
10 сферического шарнира Айв отвертиях 11 корпуса 2, и жестко закрепленного на нижнем конце 3 рычага 1 светонепроницаемого экрана 12 в виде сегмента, расположенного между источником света 5 и светочувствительными элементами 6 и 7 на сферическом шарнире 4, а рычаг установлен с возможностью вращения вокруг своей оси относительно сферического шарнира А,
Рычаг 1 снабжен рукояткой 13 и установлен внутри втулки 14, жестко связанной со сферическим шарьгаром 4 Между рукояткой 13 и втулкой I4 установлена возвратная пружина 15. В качестве све точувствительных элементов 6-9 применены фоторезнсторы.
Рукоятка обучения промьшшенного робота работает следующим образом.
После подачи питания (шины питания не показаны) на источник света
5и фоторезисторы 6-9 отклоняют рычаг вместе с втулкой 14, например влево. При этом приоткрывается приемная часть правого фоторезистора 9 на который через диафрагму, образованную отверстием 11 и сферическим шарниром 4, попадает световой поток от источника света 5. Изменяется электропроводимость фоторезистора
9 и сигнал, получаемый с него, пропорциональный площади засветки приемной части фоторезистора (зависимость эта линейная), поступает на
усилитель (если это необходимо) и далее на один из приводов промьшшенного робот а (не показаны), ответственного за перемещение одного из звеньев робота по одной из трех за-
данных координат. Причем два противоположных фоторезистора 8 и 9, лежащих на одной прямой, отвечают за перемещение звена робота по одной из координат.
Формирование управляющего сигнала с фоторезисторов 6 и 7 происходит за счет попадания светового потока от источника света 5 на приемную часть фоторезистора 6 или 7 при
повороте рукоятки 13, жестко закрепленной на рычаге 1 с светонепроницаемым экраном 12, вокруг оси рычага 1, преодолевая усилие пружины 15. Один из фоторезисторов 6 или 7
отвечает за перемещение одного из звеньев робота в одну сторону, а другой - в другую по одной из выб- ранньпс координат.
Формула изобретения
Рукоятка обучения промьшшенного робота, содержащая рычаг, щарнирно установленный в корпусе и сопряженный с датчиками перемещений, отличающаяся тем, что, с целью повьшгения точности, перемещений состоят из установленного на нижнем конце рычага в центре сфернческого шарнира источника света, светочувствительных: элементов, установленных симметрично оси рычага на внутренней поверхности сферического шарнира и в отверстиях корпуса, и
жестко закрепленного на нижнем конце рычага светонепроницаемого экрана в виде сегмента, расположенного между источником света и светочувствительными элементами на сферическом шарнире, а рычаг установлен с возможностью вращения вокруг своей оси относительно сферического шарнира.
Мд
(Риг. 2
Вид Б
PU8. 3
Редактор И.Сегляник
Составитель В.Муханов
Техред М.Ходанич Корректор С.Черни
Заказ 4125/48Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4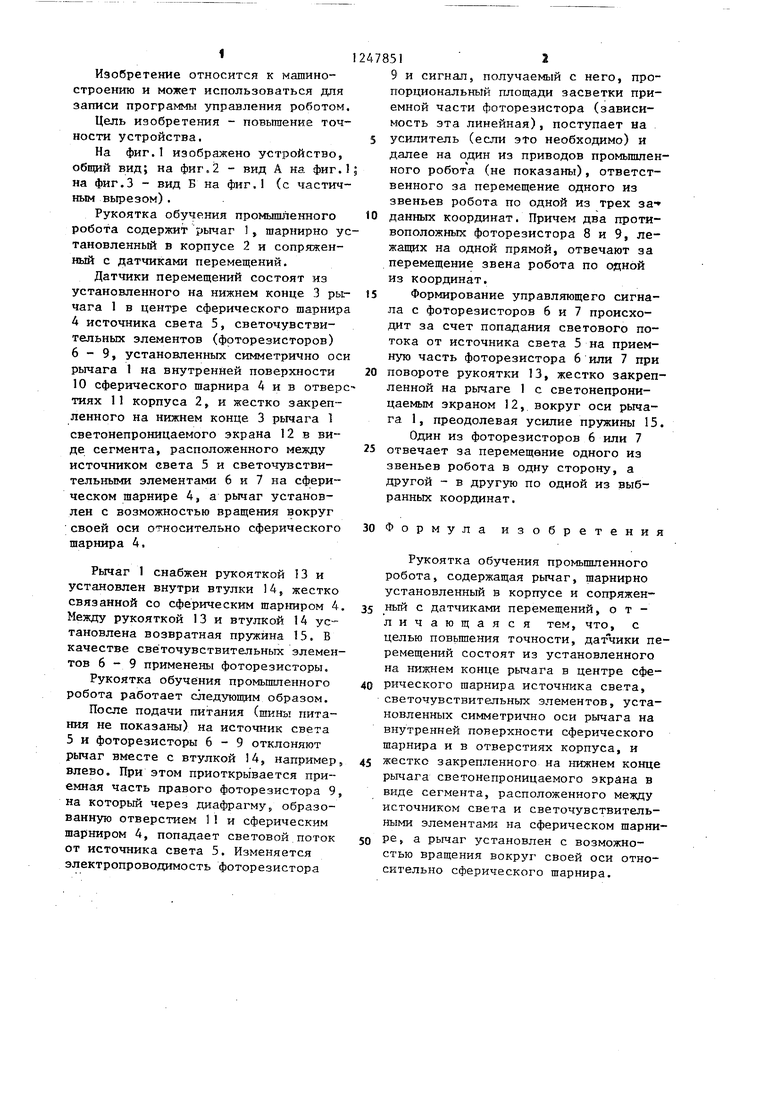
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения деформаций | 1988 |
|
SU1504500A1 |
| УСТАНОВКА ДЛЯ ТЕСТИРОВАНИЯ ЧИПОВ КАСКАДНЫХ ФОТОПРЕОБРАЗОВАТЕЛЕЙ НА ОСНОВЕ СОЕДИНЕНИЙ Al-Ga-In-As-P | 2009 |
|
RU2391648C1 |
| Фотоэлектрическое устройство для умножения электрических сигналов на гармонические функции | 1976 |
|
SU661571A1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1972 |
|
SU432534A1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЕР | 1993 |
|
RU2065130C1 |
| Прибор для получения изображений объекта в центральной аксонометрии | 1982 |
|
SU1025532A1 |
| Способ измерения абсолютного положения конечного звена многозвенного механизма промышленного робота | 2016 |
|
RU2641604C1 |
| Устройство для определения искривления горизонтальных скважин | 1983 |
|
SU1148989A1 |
| ФОТОНАБОРНАЯ МАШИНА | 1955 |
|
SU106132A1 |
| Фотоэлектрическое многоканальное устройство для умножения на полигармонические синусно-косинусные зависимости | 1980 |
|
SU943771A1 |
Изобретение относится к области автоматики. Изобретение позволяет повысить точность манипулирования. Для этого датчики перемещений состоят из установленного на нижнем конце рычага 1 в центре сферического шарнира (СШ) 4 источника света (ИС) 5 и светочувствительных элементов (СЭ) 6...9, установленных симметрично оси рычага 1 на СШ 4 и в отверстиях 11 корпуса 2, а также экраны 12 на рычаге 1 между ИС 5 и СЭ 6,7, расположенными на СШ 4. При этом отклонение рычага 1 в двух взаимно перпендикулярных плоскостях или вращение его вокруг своей оси вызывает попадание соответствующего светового потока от ИС 5 на СЭ 6...9, с которых снимается сигнал управления. 3 ил. i (Л fue. -Г
| Рукоятка обучения промышленного робота | 1977 |
|
SU737205A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Медведев B.C | |||
| и др | |||
| Системы управления манипуляционных роботов | |||
| М.: Наука, 1978, с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
