Изобретение относится к приборам для построения аксонометрических проекций и может быть использовано как внешнее устройство ЭВМ для автоматического полумения изображений объекта в центральной аксонометрии с любой точки зрения без пересчета координат.
Известен прибор для получения изображений объекта в центральной аксонометрии, содержащий установленные на стойке пространственный световой координатограф с устройством управления координатой iсветового сигнала, светонепроницаемый сферический корпус, фотокамеру и устройство для установки объектива фотокамеры в заданную масштабную точку зрения, содержащее винтовую пару и криволинейные направляющие f13Однако известный прибор характеризуется недостаточной четкостью получаемого изображения.
Цель изобретения - повышение качества изображения.
Поставленная цель достигается . тем, что в приборе для получения изобра жений объекта в центральной аксонометрии, содержащем установленные на стойке пространственный световой координатограгф с устройст.вом управления координатой светового сигнала, светонепроницаемый сферический корпус, фотокамеру и устройство для установки объектива фотокамеры р заданную масштабную точку зрения, содержащее винтовую пару и криволинейные направляющие, координатограф выполнен в виде точечного источника света, а устройство управления имеет три размещенных по трем взаимно перпендикулярным направлениям винта, каждый из которых несет каретку, и три шаговых электродвигателя, соединенных с винтами при этом один электродвигатель установлен на стойке, другой электродвигатель - на каретке первого винта, третий электродвигатель - на каретке второго винта, а источник света на каретке третьего винта.
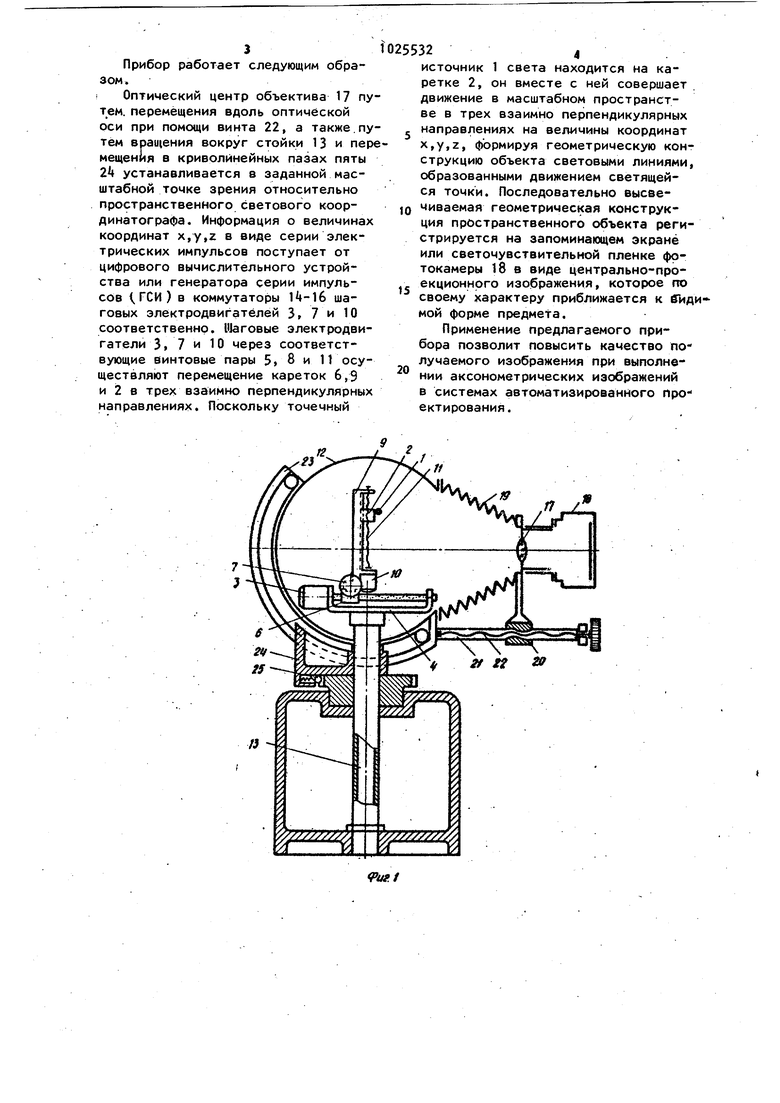
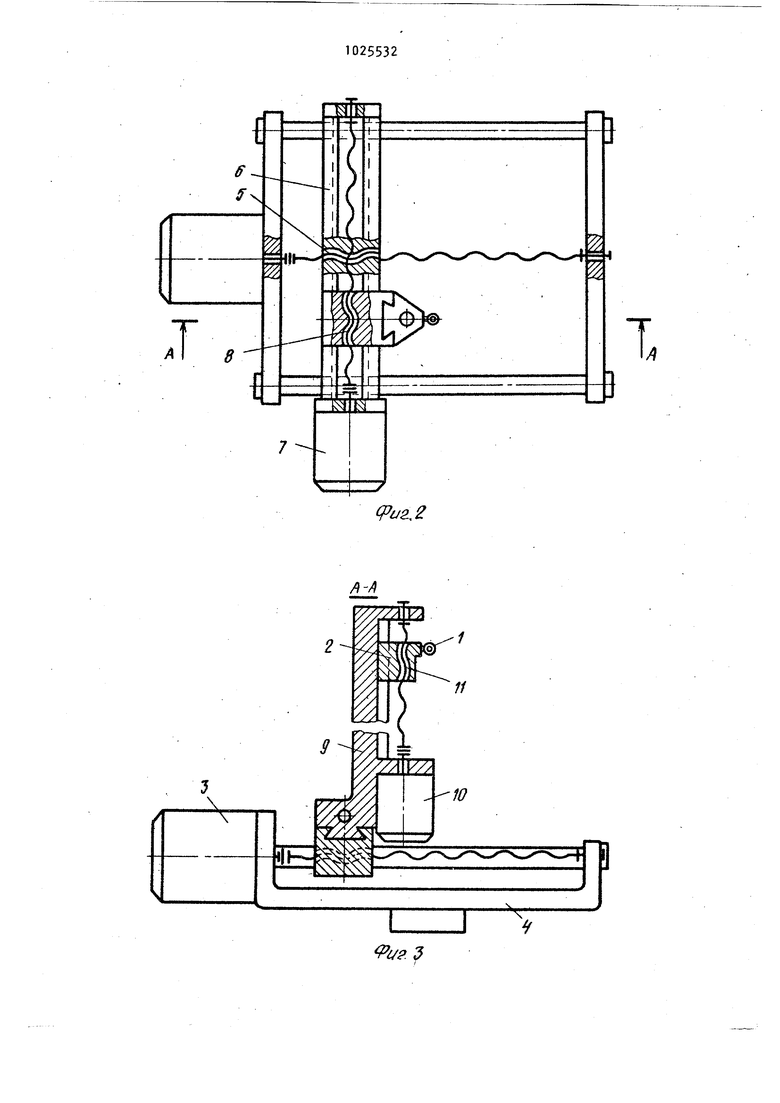
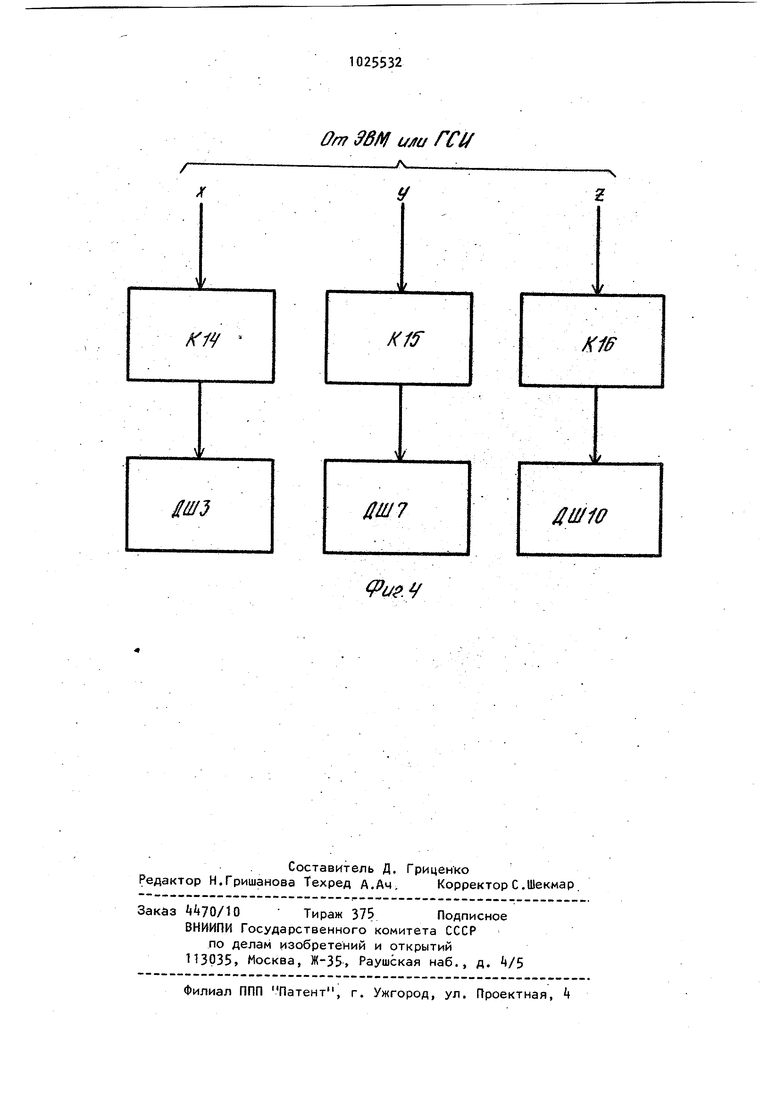
На фиг.1 показан прибор, общий вид; на фиг.2 - пространственный световой координатограф с устройством управления координатой светового сигнала; на фиг.З - разрез А-А на фиг.2; на фиг. k - блок-схема управления шаговыми двигателями.
Прибор содержит пространственный световой координатограф с устройством управления координатой светового сигнала, который состоит из точечного источника 1 света, жестко закрепленного на каретке 2, шагового электродвигателя 3 жестко закрепленного на обойме t и осуществляющего с помощью микрометрической винтовой пары 5 дискретное перемещение каретки 6 вдоль направляющих обоймы 5, шагового электродвигателя 7, жестко закрепленного на каретке 6 и осуществляющего с помощью микрометрической винтовой пары 8 дискретное перемещение каретки 9 вдоль направляющих каретки 6, шагового электродвигателя 10, жестко закрепленного на каретке 9 и осуществляющего с помощью микрометрической винтовой пары
11дискретное перемещение каретки 2 вдоль прямолинейных направляющих каретки 9. Координатограф размещен в сферическом светонепроницаемом корпусе 12 и жестко закреплен на полой стойке 13, через отверстия которой проходят электрические провода, передающие управляющие импульсы с коммутаторов Н-Тб на соответствующие шаговые электродвигатели 3 7
и 10. Программа управления шаговыми электродвигателями 3, 7 и 10 формируется в коммутаторах 14-16 в зависимости от значений трех координат x,y,z пространства.
Обойма объектива 17 фотокамеры 18 связана со сферическим светонепроницаемым корпусом 12 складным мехом 19 а также жестко соединена с кареткой 20, которая может перемещаться вдоль прямолинейных направляющих 21 посредством винта 22. Это дает возможность изменить расстояние между оптическим центром объектива и центром сферического корпуса. К корпусу
12жестко прикреплены криволинейные ползуны 23, которые входят в направляющие пазы пяты 2. Последние поз-: воляют изменять угол наклона оптической оси объектива 17 по отношению к плоскости горизонта. Оптический центр объектива может перемещаться в вертикальной плоскости по дуге окружности вокруг горизонтальной оси, проходящей через центр сферического корпуса 12. Положение оптического центра объектива 17 в горизонтальной плоскости изменяется путем поворота сферического корпуса вокруг вертикальной оси. Фиксация корпуса осуществляется с помои1ью фиксирующего устройства 25.
3
Прибор работает следующим образом.
I Оптический центр объектива 17 путем, перемещения вдоль оптической оси при помощи винта 22, а также.путем вращения вокруг стойки 13 и перемещения в криволинейных пазах пяты 2k устанавливается в заданной масштабной точке зрения относительно пространственного светового координатографа. Информация о величинах координат x,y,z в виде серии электрических импульсов поступает от цифрового вычислительного устройства или генератора серии импульсов i, ПСИ ) в коммутаторы 14-16 шаговых электродвигателей 3, 7 и 10 соответственно. 11 аговые электродвигатели 3, 7 и 10 через соответствующие винтовые пары 5 8 и 1t осуществляют перемещение кареток 6,9 и 2 в трех взаимно перпендикулярных направлениях. Поскольку точечный
255324
источник 1 света находится на каретке 2, он вместе с ней совершает движение в масштабном пространстве в трех взаимно перпендикулярных , направлениях на величины координат x,y,z, формируя геометрическую конструкцию объекта световыми линиями, образованными движением светящейся точки. Последовательно высвечиваемая геометрическая конструк10ция пространственного объекта регистрируется на запоминапцем экране или светочувствительной пленке фотокамеры 18 в виде центрально-проекционного изображения, которое по
15 своему характеру приближается к б11димой форме предмета.
Применение предлагаемого прибора позволит повысить качество по лучаемого изображения при выполне20нии аксонометрических изображений в системах автоматизированного про ектирования.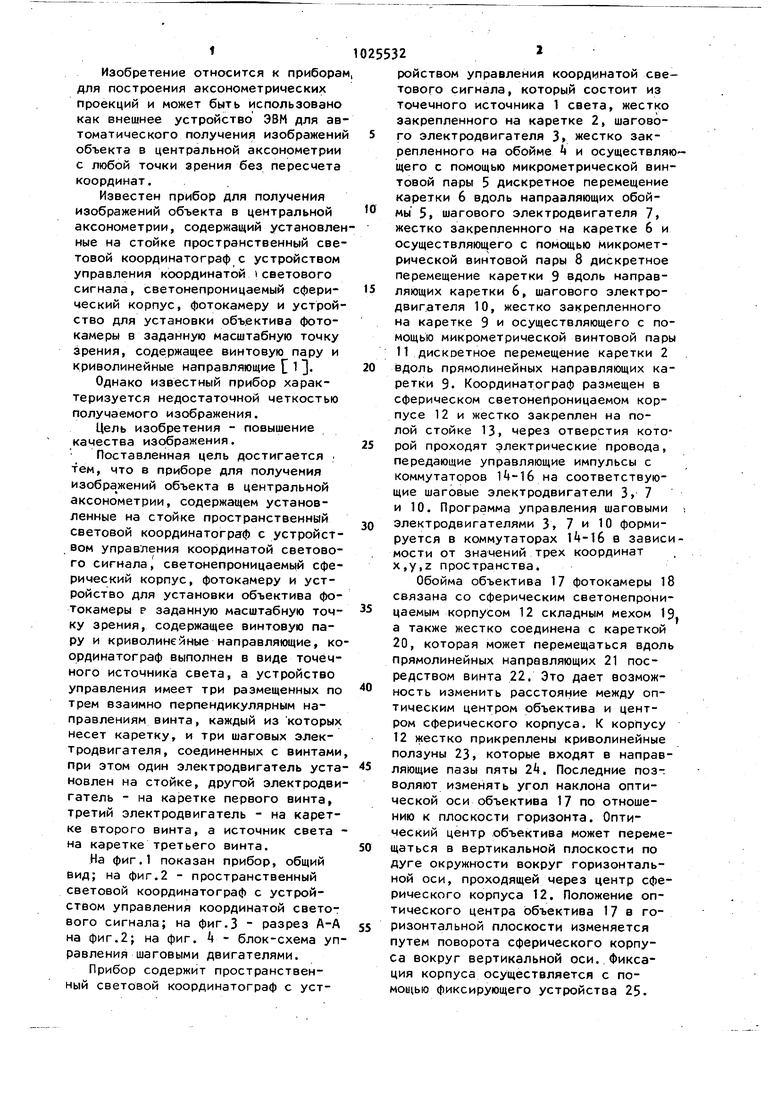
| название | год | авторы | номер документа |
|---|---|---|---|
| Проекционный координатограф | 1979 |
|
SU892750A1 |
| МИКРОФИЛЬМИРУЮЩИЙ АППАРАТ С КАССЕТАМИ | 2001 |
|
RU2201612C2 |
| АППАРАТУРА ДЛЯ НАБЛЮДЕНИЯ ЗА ПРОСТРАНСТВОМ НА ФОНЕ ЯРКОГО УДАЛЕННОГО ИСТОЧНИКА СВЕТА | 2008 |
|
RU2366974C1 |
| Способ определения параметров геометрии рельсовой колеи и система для его осуществления | 2018 |
|
RU2686341C1 |
| МОДУЛЬ И СИСТЕМА ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813210C1 |
| Панорамная фотокамера | 1983 |
|
SU1296995A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАЛЫХ НЕМАГНИТНЫХ ВКЛЮЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2458337C2 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Устройство для измерения деталей вращения | 1986 |
|
SU1411585A1 |
| СПОСОБ ЗАПИСИ НА ПОВЕРХНОСТЬ МАСШТАБИРОВАННОЙ КОПИИ ИЗОБРАЖЕНИЯ-ОРИГИНАЛА | 1994 |
|
RU2074410C1 |
я J
i.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU327080A1 | |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
