Изобретение отиосито-: к устрнйствам и оборудованию, предназначенным для дистанционной работы с радиоактивными и токсичными веществами, и может быть использовано в атомной, рядиохимической и химической промьпи. шнности.
Цель изобретении улучи1е1 ие защиты обслуживающего персонала от воздействия радиоактивных и токсичных всчиеств.
Ма фиг, I представлена схема манипулятора; на фиг. 2 схема манипулятора д;5Я
гам м а - изл уча ющей среды.
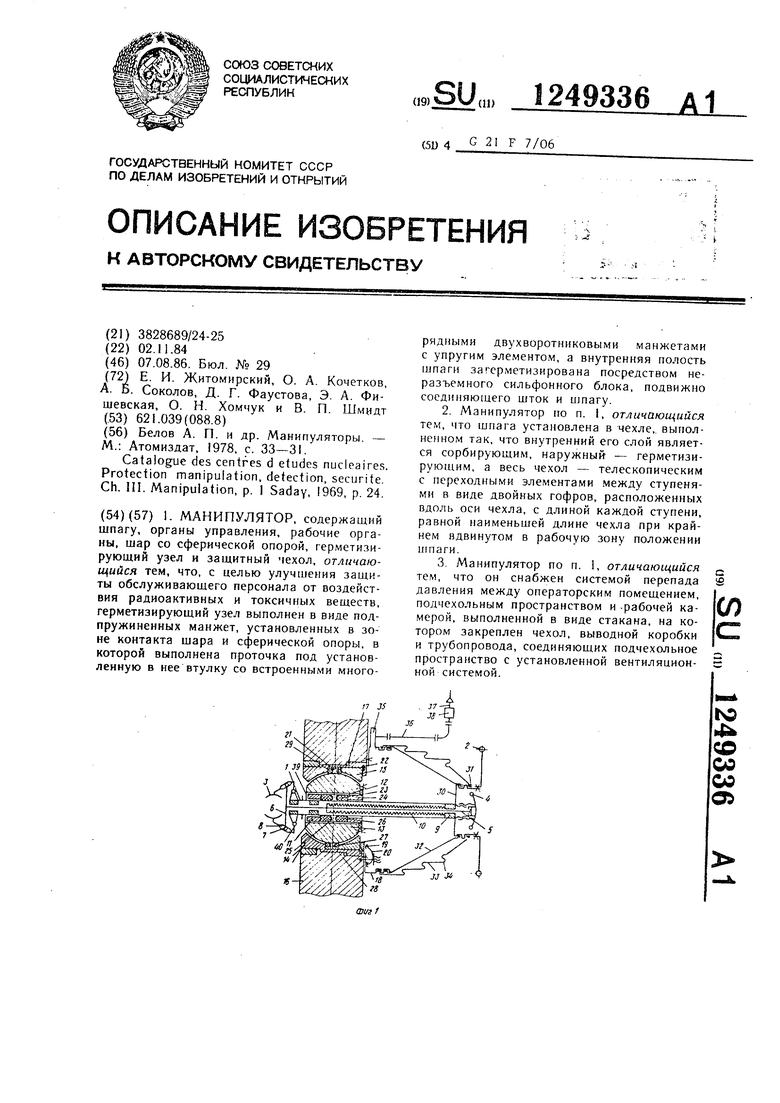
Маиииулятор содержит несущую трубу 1 (фиг. ), имеющую на одном конце штурвал 2 управления, на другом - рабочие органы в виде захватов 3. Штурвал 2 имеет рукоятку-гайку 4 управления, которая воздействует со штоком 5, па иротивоиоложио.м KOiuie которого закреплена планка 6 с n;i.4i iuiiv;ii 7, входящими в пазы 8 з. .3. ()к о 1оптр руется па юдшиппиках 9 .лкспия п г(М)метизп)уетея от пропик- :(П::1;ии через , it подаиппничах 9 ра- ;ик)акп111И1111Х или т(.)КС1 чных iscHiecTB с по- МОП1.ЫО i;c:;a3 beMH(;i4j cn.Mb()OHii:ii() блока 10.
Несущая Tpv6a I помешена в iio.aiiiHnisn- ки 11 скольи е1ип: стакана 12, который сл-юн- тирован жестко в П1аровой (шоре 13, цепт- р. ру101иейси в сфсрическ11Х гнез;|,ах втулок 1 I IF). V,:v..:iKa 14 монтируется и и.роходке 3aiiUiTi oi i сгепы 16 и поджимается к уи.лот- 1е .чпо i п.осред.ством стакана IB, а втул- i La 15 пеп 1 )ир етси во втулке 14. Меобхо- .«имьпл зазоо сферической поверх- посгыг п;апов11н 13 и гнездами вту- ..пок 14 ii 15 Л.ОС : игается по.тжатием втулки 15 через Ko/ibuo 19 прпхватом 20 до упора в компенсатор 21. Между кольцом 19 и втулкой 15 имеетея герметизирующее кольцо 22. Между фланцем стакапа 12 и niapo- вой опорой 13 имеется герметнзиру1он1.ее ко.чьцо 23.
Гермет - зация наружной цилиндричес- чой ио 5е 1хности 1 есун1ей трубы 1 ocyiriecT- здяется с :омошью мпогорядного манжетного уплотпения 24 с автоматическим поджимом манжет по мере их )Са пружиной 25 через кс.хпьцо 26, монтируемое в стакане 2. ( цел151о гep eтизal:.liн сферической поверхности Н1аровой опоры 13 в кольцевое npocTjiancTVjo между втулками 14 и 15 н компенсатором 21 вегроепо манжетное унлотнеьше 27 с автоматическим поджимом по мере их износа посред- ствол кольиево1 о ynpyi oro звена, например ToiiKocTciJHoro кольца 28 криво.пиней- ного npo(;M-..:iu, воздействующего на манжеты через кольца 29.
5
0
5
0
5
5
.50
Для зашиты обслуживающего персонала or воздействия радиоактивных или ток- веществ, которые могли бы проникнуть через манжетные уплотнения, в зоне нахождения оператора на стаканах 18 и 30 закреплены с помошью хомутов 31 два чехла: внутренний чехол 32, сорбирующий радиоактивные или токсичные ве1дества, и наружный чехол 33 герметизирующий, нричем герметизируюн;ий чехол выполнен телеско- гжческим с переходными элементами между ступенями в виде двойных гофров 34, расположенных вдоль оси чехла с длиной каждой ступени, равной наименьи.1ей длине чехла нри крайнем вдвинутом в рабочую зону положении несущей трубы 1. Для Обеспечения более легкого перемещения несушей трубы 1 в осевом направлении удаления радиоактивных или токсичных веществ из иодчехольного пространства -манипулятор имеет систему поддержа1 ия перепада дав- .пения, состояп1ую из стакана 18, выводной коробки 35, трубопровода 36 и вентиляцион- пой сети 37 с фнльтром 38.
Для снятия излишков радиоактивного 1-;ли токсичного продукта с несущей трубы 1 опо)а 13 имеет съемник 39. Захваты 3 установлены с возможностью вращения вокруг осей 40.
Когда маш1пулятор работает в среде, излучающей г амма-лучи, , металлическая втулка 41 скольжения (фиг. 2) помещена в центре шаровой опоры 3, занимая почти всю длину ее проходки, а на края металлической втулки 41 вынесены двухрядные манжетные уплотнения 42. Автоматический поджим манжет по мере их износа осуществляется кольцевыми пружинами 43 через проста- вочиые кольца 44. Предварительный натяг п)уж.ин 43 осуществляется поджимом фланца 45. Конструкция манжет с автоматическим поджимом по мере их износа используется и для уплотнения шаровой опоры. Манжеты 46 поджимаются кольцевыми пружинами 47 через кольцо 48.
Манипулятор может перемещаться в ща- ровой опоре в осевом направлении, вращаться вокруг оси и поворачиваться вокруг центра шара в любом направлении. Для осуц..ес.твления зажима или разжима переносимых предметов вращают рукоятку-гайку 4, тем самым перемещая шток 5, планка 6 перемещает пальцы 7 по наклонным пазам 8 захватов 3, заставляя последние поворачиваться вокруг осей 4.0. При этом обеспечивается надежная защита обслужи- ваюнлего персонала от воздействия радиоактивных и токсичных веществ.
48
фиг. 2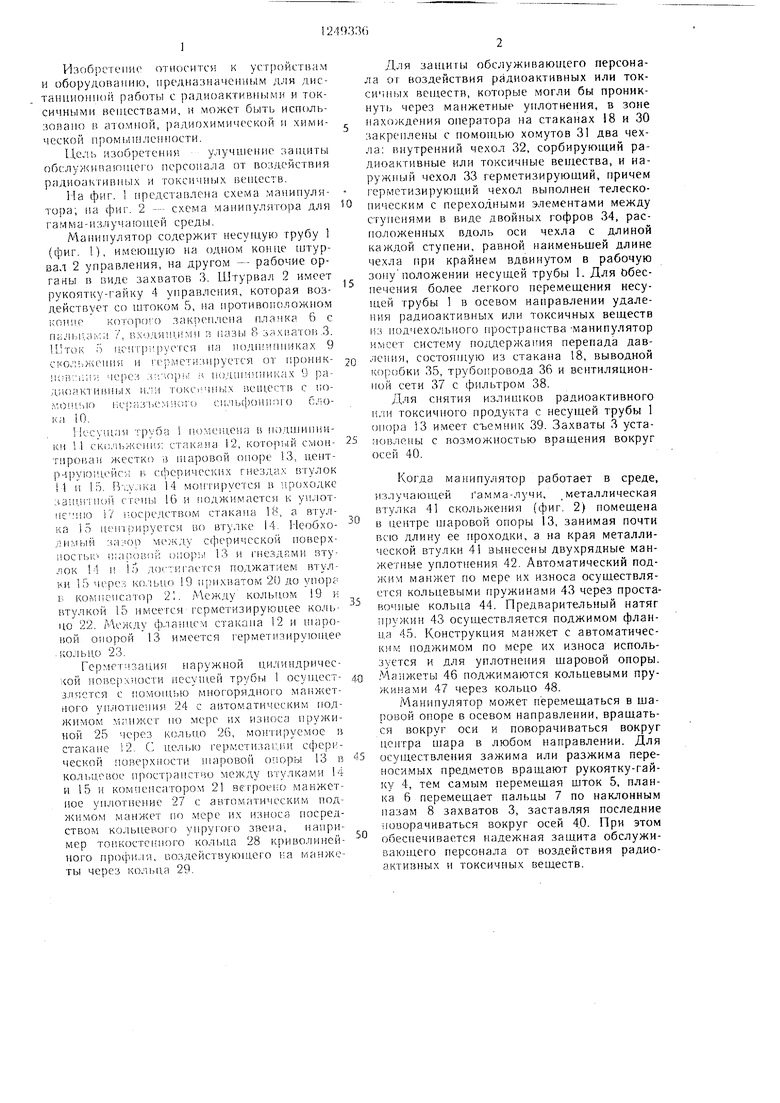
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 2017 |
|
RU2671231C2 |
| Стенд для оценки качества манипуляторов | 1985 |
|
SU1301692A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691177C1 |
| Манжетное уплотнение | 1983 |
|
SU1141255A1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| Двухцелевой транспортный упаковочный комплект для технологического обращения и транспортирования по дорогам общего пользования изделий активной зоны реактора | 2022 |
|
RU2793228C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2718812C1 |
| УНИВЕРСАЛЬНЫЙ ПРЕВЕНТОР ПШЕНИЧНОГО | 1991 |
|
RU2013519C1 |
| СПОСОБ ЗАГРУЗКИ ОБЛУЧЕННЫХ БЛОКОВ ДАВ-90 И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2510086C2 |
| Белов А | |||
| П | |||
| и др | |||
| Манипуляторы | |||
| - М.: Атомиздат, 1978, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Catalogue des centres d etudes nucleaires | |||
| Protection manipulation, detection, securite | |||
| Ch | |||
| HI | |||
| Manipulation, p | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
