Предлагаемое изобретение относится к защитной технике и предназначено для дистанционного проведения работ с радиоактивными веществами в лабораторных и производственных шкафах и защитных боксах, исключающих непосредственный контакт человека с этими веществами, воздействующими на обслуживающий персонал.
Целью изобретения является повышение степени биологической защиты манипулятора при использовании его в работе с высокоактивными изотопами ядерного производства радиоактивных веществ с комбинированным (бета и гамма) излучением.
Цель достигается тем, что в шпаговом манипуляторе выполнен четвертый дополнительный внутренний сферический элемент, расположенный со стороны исполнительного органа, а образованная теперь уже четырьмя сферическими элементами и сильфонами или мембранными компенсаторами, замкнутая со стороны рукоятки управления и со стороны исполнительного органа, полость заполнена экранирующим веществом, поглощающим (бета и гамма) ионизирующие излучения. В качестве такого экранирующего вещества может быть использован порошок иридия, графита или жидкости, например, проточная вода, а для обеспечения заполнения экранирующим веществом, замкнутой со стороны рукоятки управления и со стороны исполнительного органа, образованной полости в стенках четырех сферических элементов, в трубе и в проходке манипулятора выполнены отверстия, соединяющие эти полости герметичной шаровой опоры с операторским помещением, в котором установлена сигнализирующая аппаратура, контролирующая герметизацию работы всего манипулятора и степень экранирования биологической защиты оператора.
В качестве контролирующей аппаратуры может быть использовано ранее известное сигнализирующее устройство по а.с. №772841 или а.с. №1274922.
Кроме того, с целью расширения диапазона возможностей полной герметизации всего манипулятора его исполнительный орган выполнен в виде механизма многократного шарнирного параллелограмма с жестко закрепленным центральным шарниром, разделяющим многократный параллелограмм на ведущее звено, состоящее из одного параллелограмма, и ведомое звено, состоящее из нескольких параллелограммов, причем параметры ведущего звена этого механизма значительно больше параметров ведомых звеньев, которые по отношению друг к другу одинаковы, а ведущее звено через жестко закрепленный центральный шарнир связано со штангой и рукояткой управления, ведомое звено этого механизма связано с рабочим органом манипулятора.
Такое техническое решение обеспечит надежное экранирование и высокую степень биологической защиты оператора при работе с высокоактивными изотопами ядерного производства радиоактивных веществ с комбинированным (бета и гамма) излучением и существенно расширит диапазон возможностей полной герметизации всего манипулятора, так как небольшой ход штанги в этой конструкции манипулятора можно надежно загерметизировать обычным сильфонным компенсатором, выпускаемым промышленностью.
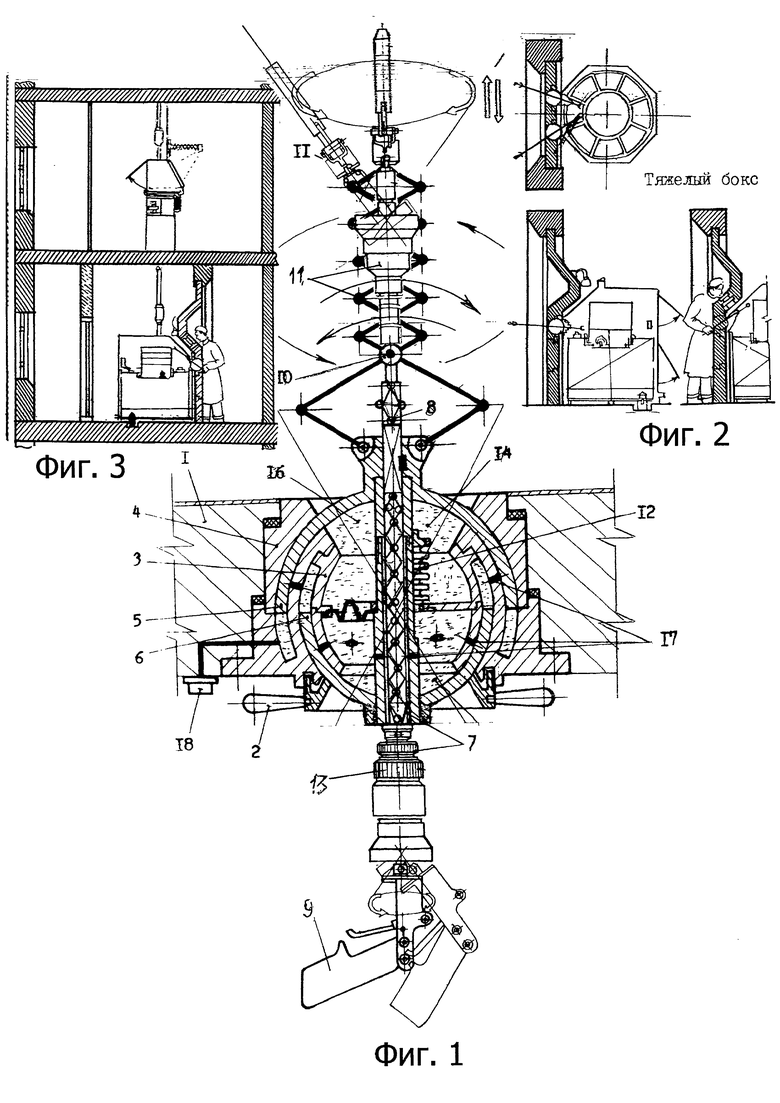
На фиг. 1 представлен общий вид шпагового манипулятора, на фиг. 2, 3.
Манипулятор содержит проходку 1, шаровую опору с фиксатором 2, состоящую из внутреннего 3, наружного 4 и двух средних 5, 6 сферических элементов, расположенных концентрично друг относительно друга. В опоре смонтирована труба 7, несущая внутри себя с возможностью поступательного перемещения штангу 8, имеющую на одном конце рукоятку управления 9, а на другом связана через жестко закрепленный шарнир 10 с механизмом многократного шарнирного параллелограмма 11, являющимся исполнительным органом манипулятора, имеющим рабочий орган.
Исполнительный орган выполнен в виде механизма многократного шарнирного параллелограмма 11 с жестко закрепленным центральным шарниром 10, разделяющим многократный параллелограмм на ведущее звено 13, состоящее из одного параллелограмма, и ведомое звено 14, состоящее из нескольких параллелограммов, причем параметры ведущего звена этого механизма значительно больше параметров ведомых звеньев 14. Ведущее звено через жестко закрепленный центральный шарнир связано со штангой и рукояткой управления, а ведомое звено этого механизма связано с рабочим органом манипулятора.
Внутренний сферический элемент 3 шаровой опоры соединен с трубой 7 посредством герметичного чехла 15, а другой конец трубы 7 связан посредством герметичного чехла 16 с рукояткой управления 9 манипулятора. Чехлы 12 и 13, выполнены в виде сильфонов, а чехол 12 может быть выполнен в виде мембраны. Средние 5, наружный 4 сферические элементы образуют, замкнутую со стороны рукоятки управления 9 и со стороны исполнительного органа 11, полости 17 и 18, заполненные экранирующим веществом 17, в качестве которого может быть использован порошок иридия, графита или жидкость, например, проточная вода. В стендах четырех сферических элементов 3, 4, 5 и 6, в трубе 7, а также в проходке 1 выполнены отверстия (каналы) 20 для сообщения с сигнализирующей аппаратурой 21. На внутреннем 3, среднем 5 и наружном 4 элементах выполнены конусные поверхности.
Манипулятор работает следующим образом.
Инструмент 13 исполнительного органа 11 манипулятора получает качательное движение от рукоятки управления 9 через штангу 8, качающуюся вместе с трубой 7 в шаровой опоре, герметичный чехол 15, который отделяет рабочее пространство манипулятора от нерабочего и герметизирует передачу качательного движения исполнительному органу манипулятора от органа его управления. Экранирующее вещество 16, находящееся в герметичных полостях 17 и 18 создает дополнительную биологическую защиту при работе манипулятора с высокоактивными изотопами и экранирует (защищает) оператора от воздействия на него комбинированного (бета и гамма) излучения. При этом полости с экранирующим веществом контролируются сигнализирующей аппаратурой 21, связанной с герметичными полостями 17 и 18 отверстиями (каналами) 17, выведенными в операторскую.
При вращательном движении исполнительный орган 11 манипулятора получает вращение от рукоятки управления 9 через штангу 8, вращающуюся в трубе 7 шаровой опоры и внутри герметичного чехла 13, отделяющего рабочее пространство манипулятора от нерабочего и герметизирующего передачу возвратно-поступательного движения.
При сжатии и разжатии губок инструмента 12 исполнительного органа 11 манипулятора, последний получает поступательное движение от рукоятки управления 9, посредством чего происходит захват предмета или его высвобождение.
При возвратно-поступательном движении исполнительного органа 11 механизм многократного шарнирного параллелограмма перемещаемое его ведущего 13 и ведомого 14 звеньев позволяет обеспечить возможность герметизации движения штанги 8 относительно трубы 7 обычным сильфонным компенсатором 16, разделяющим рабочее пространство манипулятора от нерабочего и надежно герметизирующего возвратно-поступательное движение исполнительного органа.
ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ
Использование изобретения позволит применять конструкцию предлагаемого манипулятора в ядерной промышленности для производства радиоактивных веществ с комбинированным (бета и гамма) излучением. Так как предлагаемая конструкция манипулятора обладает высокой степенью биологической защиты и надежно защитит оператора от воздействия на него мощного ионизирующего излучения. Это позволит нормализовать радиационную обстановку в операторских помещениях и в окружающей среде на ряде предприятий атомной промышленности, что положительно скажется на технике безопасности работающего персонала и здоровья операторов, сократит общие затраты на дезактивацию рабочих помещений и организацию лечебно-профилактических мероприятий.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2724735C1 |
| Шпаговый манипулятор | 2018 |
|
RU2698114C2 |
Изобретение относится к шпаговым манипуляторам. Манипулятор содержит проходку, шаровую опору с фиксатором, при этом шаровая опора состоит из концентрично расположенных четырех упомянутых сферических элементов в виде внутреннего, наружного и двух средних сферических элементов, при этом внутренний сферический элемент соединен с трубой сильфонным или мембранным герметичным чехлом, а другой конец трубы связан с рукояткой управления посредством другого сильфонного или мембранного герметичного чехла с образованием полостей, которые заполнены экранирующим веществом, причем в стенках сферических элементов, в трубе и в проходке выполнены отверстия в виде каналов, расположенных перпендикулярно друг другу. Механизм многократного шарнирного параллелограмма выполнен с жестко закрепленным центральным шарниром, разделяющим многократный шарнирный параллелограмм на ведущее звено, состоящее из одного параллелограмма, и ведомое звено, состоящее из нескольких параллелограммов, причем параметры ведущего звена больше параметров ведомых звеньев, которые по отношению друг к другу одинаковы, при этом ведущее звено через жестко закрепленный центральный шарнир связано со штангой и рукояткой управления, а ведомое звено связано с рабочим органом манипулятора. Технический результат заключается в повышении степени биологической защиты и расширении возможности полной герметизации манипулятора. 3 ил.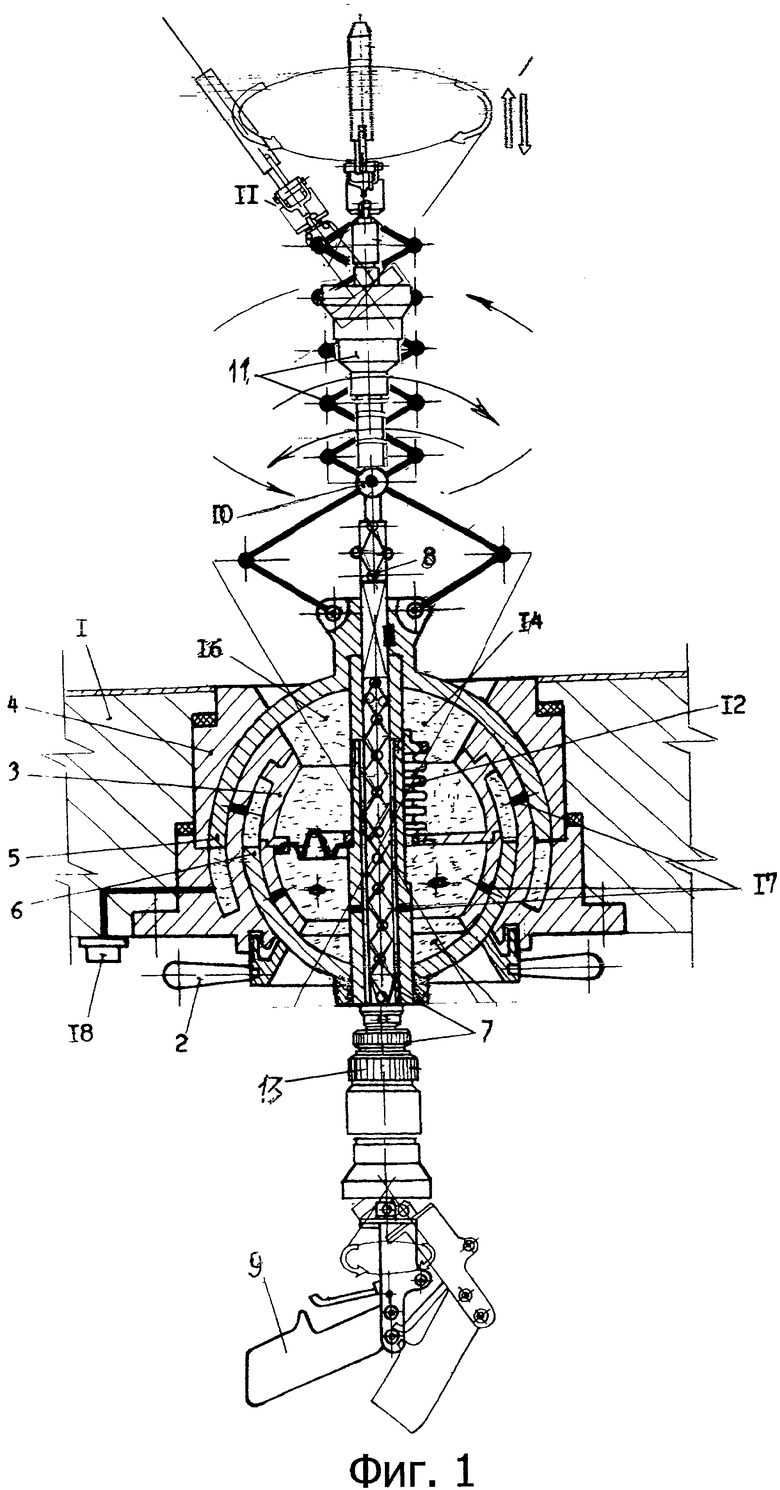
Шпаговый манипулятор, содержащий проходку, шаровую опору с фиксатором, состоящую из сферических элементов, в которой смонтирована труба с размещенной в ней штангой, выполненной с возможностью поступательного перемещения посредством закрепленной на одном ее конце рукоятки управления, при этом штанга другим концом связана с механизмом многократного шарнирного параллелограмма, соединенным с рабочим органом манипулятора, отличающийся тем, что шаровая опора состоит из концентрично расположенных четырех упомянутых сферических элементов в виде внутреннего, наружного и двух средних сферических элементов, при этом внутренний сферический элемент соединен с трубой сильфонным или мембранным герметичным чехлом, а другой конец трубы связан с рукояткой управления посредством другого сильфонного или мембранного герметичного чехла с образованием полостей, которые заполнены экранирующим веществом, причем в стенках сферических элементов, в трубе и в проходке выполнены отверстия в виде каналов, расположенных перпендикулярно друг другу, при этом механизм многократного шарнирного параллелограмма выполнен с жестко закрепленным центральным шарниром, разделяющим многократный шарнирный параллелограмм на ведущее звено, состоящее из одного параллелограмма, и ведомое звено, состоящее из нескольких параллелограммов, причем параметры ведущего звена больше параметров ведомых звеньев, которые по отношению друг к другу одинаковы, при этом ведущее звено через жестко закрепленный центральный шарнир связано со штангой и рукояткой управления, а ведомое звено связано с рабочим органом манипулятора.
| Баллистический манипулятор | 2018 |
|
RU2686166C1 |
| CN 205766092 U, 07.12.2016 | |||
| CN 105936039 B, 17.07.2018 | |||
| 0 |
|
SU152604A1 | |

