Изобретение относится к сельскому хозяйству, в частности к устройствам орошения.
Цель изобретения - повышение надежности работы.
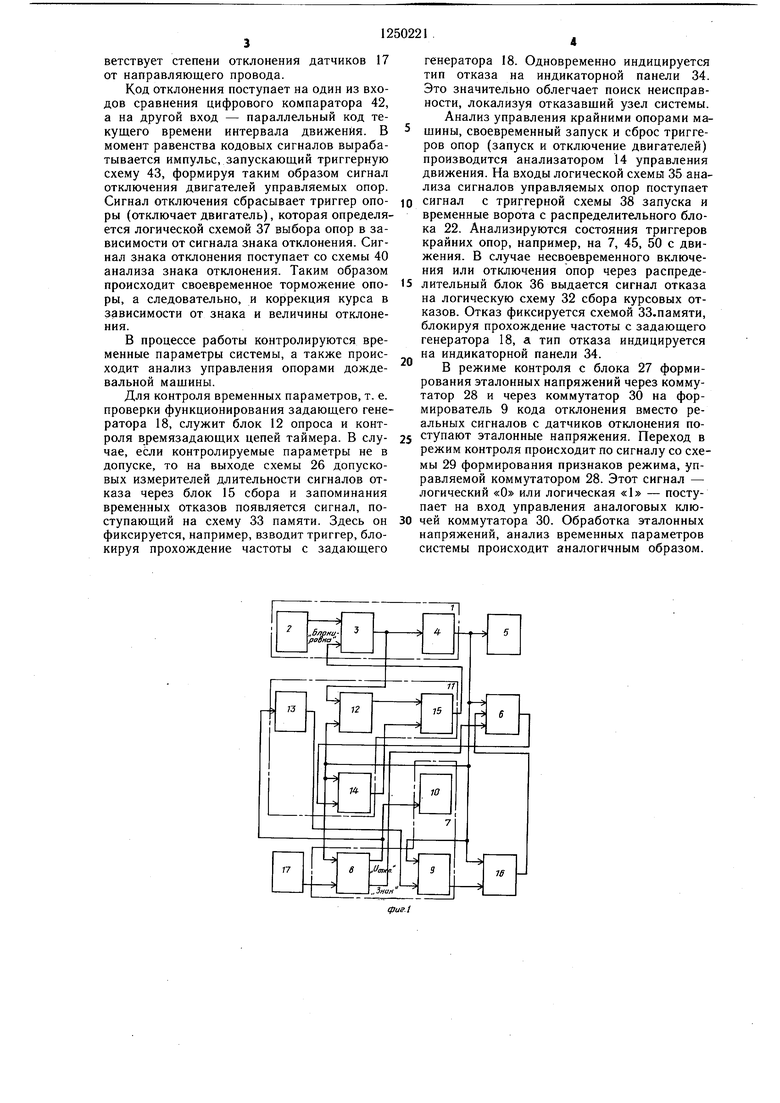
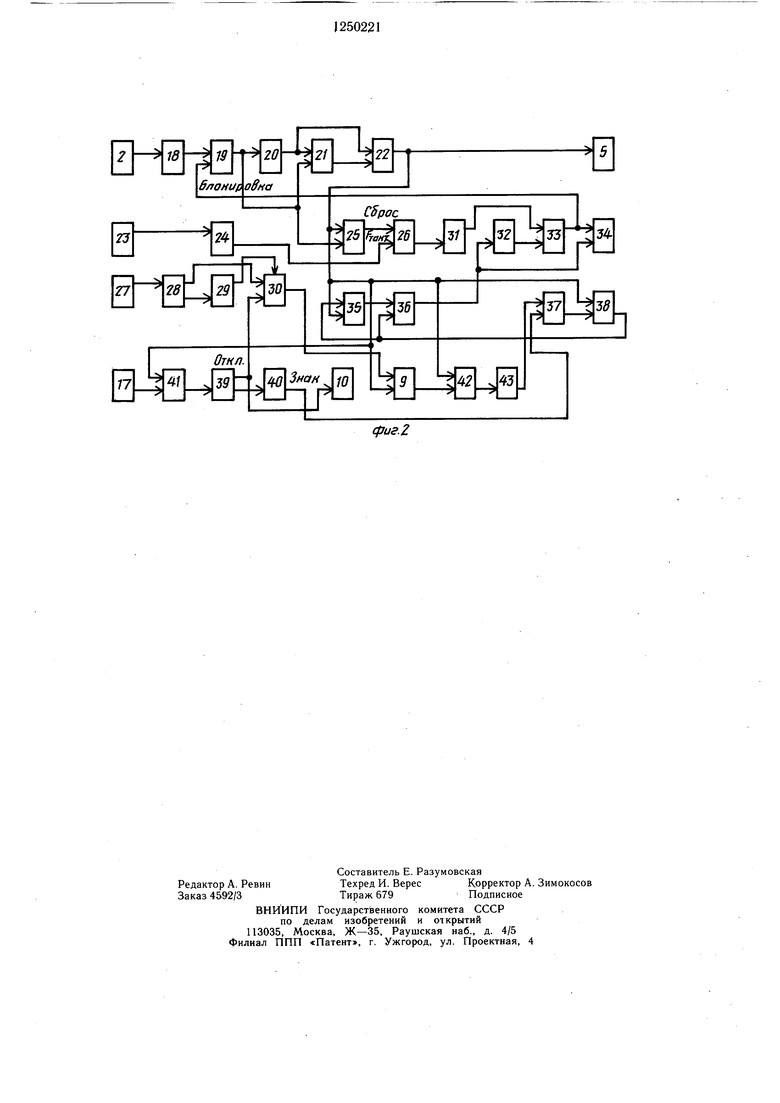
На. фиг. 1 изображена система управле- ния фронтальной дождевальной машиной; на фиг. 2 - блок-схема системы.
Система управления фронтальной дожде- вательной машиной содержит таймер 1, выполненный в виде панели 2, последова- тельно соединенных электронного времяза- дающего устройства 3 и блока 4 формирования логической последовательности сигналов управления, исполнительный механизм
5гидроклапанов полива (не показано), блок
6выбора и запуска двигателей опор, из- меритель 7 сигналов отклонения машины от направляющего привода, выполненный в виде блока 8 синхронизации измерений и селекции сигналов отклонения, формирователя
9 кода отклонения и формирователя 10 команды, устройство 11 блокировки тайме- ра 1, состоящее из блока 12 опроса и контроля времязадающих цепей таймера 1, устройства 13 задания режимов контроля, анализатора 14 сигналов управления движением и блока 15 сбора и запоминания отка- зов, преобразователь 16 кода отклонения во временной интервал работы, двигателей управляемых опор, датчик 17 отклонения.
Электронное времязадающее устройство 3 содержит последовательно соединенные задающий генератор 18 и цифровой делитель 19, собранный, например, на двоичных счетчиках.
Блок 4 формирования логической последовательности сигналов управления содержит логическую схему 20 формирования сигналов управления, выполненную на основе логических схем И-НЕ и триггерных ячеек, дешифраторы 21 временных интервалов «Пауза-движение и распределительный блок 22. Блок может содержать контрольный генератор 23, цифровой делитель 24, логические схемы 25 распределения контроли- руемых временных сигналов и схемы 26 до- пусковых измерителей длительности сигналов, в качестве которых возможно использовать двоичные счетчики с входами принудительного сброса.
Устройство 13 задания режимов контроля содержит блок 27 формирования эталонных напряжений, в виде резистивных делителей, с которых снимается эталонное напряжение для контроля измерителя отклонения от направляющего провода, коммутатор 28 (в простейшем случае галетный переключатель, коммутирующий сигналы с выхода блока 27), схему 29 формирования признака режима, управляемую коммутатором 28,- коммутатор 30, выполненный, например, на стандартных аналоговых ключах.
Блок 15 сбора и запоминания отказов содержит логическую схему 31 сбора временных отказов, логическую схему 32 сбора курсовых отказов и схему 33 памяти, панель 34 индикации состояния машины.
Схема 31 представляет собой логическое устройство И, собирающее временные отказы
Элементы схемы 33 памяти в конкретном варианте исполнения представляют собой триггерные ячейки.
Анализатор 14 сигналов управления движением содержит последовательно соединенные логическую схему 35 анализа сигналов управляемых опор и распределительный блок 36 курсовых сигналов.
Блок 6 выбора и запуска двигателей опор содержит логическую схему 37 выбора опор (на основе схем цифровой логики) и триггерную схему 38 запуска.
Блок 8 синхронизации измерений и селекции сигналов отклонения содержит схему 39 селекции сигналов отклонения, схему 40 анализа знака отклонения и схему 41 синхронизации измерений.
Преобразователь 16 кода отклонения во временной интервал работы двигателей управляемых опор может быть выполнен как цифровой компаратор 42 с последовательно включенной триггерной схемой 43 отклонения управляемых опор.
Система управления фронтальной дождевальной машиной работает следующим образом.
В начале движения машины формируются сигналы пуска, которые устанавливают триггеры схемы 38 запуска. Процесс запуска двигателей (триггеров) контролируют с помощью светодиодной индикаторной панели 34. Сигнал на индикаторную панель 34 транслируется с триггерной схемы 38 запуска через логические схемы 35 анализа сигналов управляемых опор и распределительный блок 36.
На второй секунде движения формируется сигнал синхронизации измерений, который поступает на вход управления схемы 41 синхронизации измерений и организует канал измерения отклонения, т. е. к направляющему проводу подключается источник тока (генератор), подготавливаются формирователем 9 кода отклонения,сбрасывают- ся счетчики аналого-цифрового преобразователя.
Через усилители датчиков 17 отклонения наводимое от протекающего по направляющему проводу тока напряжение поступает на схему 39 селекции сигналов отклонения и схему 40 анализа знака отклонения. Здесь напряжение анализируется по величине и через коммутатор 30 поступает на вход формирователя 9 кода отклонения, на другой вход которого поступает строб высокой частоты для заполнения счетчиков аналого-цифрового преобразователя, а с выхода формирователя 9 снимается цифровой параллелльный код, величина которого соотгенератора 18. Одновременно индицируется тип отказа на индикаторной панели 34. Это значительно облегчает поиск неисправности, локализуя отказавший узел системы. Анализ управления крайними опорами машины, своевременный запуск и сброс триггеров опор (запуск и отключение двигателей) производится анализатором 14 управления движения. На входы логической схемы 35 анализа сигналов управляемых опор поступает
ветствует степени отклонения датчиков 17 от направляющего провода.
Код отклонения поступает на один из входов сравнения цифрового компаратора 42, а на другой вход - параллельный код текущего времени интервала движения. В момент равенства кодовых сигналов вырабатывается импульс, запускающий триггерную схему 43, формируя таким образом сигнал
отключения двигателей управляемых опор. ...
Сигнал отключения сбрасывает триггер опо- ю сигнал с триггернои схемы 38 запуска и ры (отключает двигатель), которая определя- временные ворота с распределительного бло- ется логической схемой 37 выбора опор в за- ка 22. Анализируются состояния триггеров висимости от сигнала знака отклонения. Сиг- крайних опор, например, на 7, 45, 50 с дви- нал знака отклонения поступает со схемы 40 жения. В случае несвоевременного включе- анализа знака отклонения. Таким образом ния или отключения опор через распреде- происходит своевременное торможение опо- 15 лительный блок 36 выдается сигнал отказа
- на логическую схему 32 сбора курсовых отказов. Отказ фиксируется схемой ЗЗ.памяти, блокируя прохождение частоты с задающего генератора 18, а тип отказа индицируется на индикаторной панели 34.
В режиме контроля с блока 27 формирования эталонных напряжений через коммутатор 28 и через коммутатор 30 на форры, а следовательно, и коррекция курса в зависимости от знака и величины отклонения.
В процессе работы контролируются временные параметры системы, а также происходит анализ управления опорами дождевальной мащины.
Для контроля временных параметров, т. е. проверки функционирования задающего генератора 18, служит блок 12 опроса и конт20
мирователь 9 кода отклонения вместо реальных сигналов с датчиков отклонения поUalOua 10, иЛулЧИ l Uliuvjv-a ri .-..-... - -
роля времязадающих цепей таймера. В слу-25 ступают эталонные напряжения. Переход в
чае если контролируемые параметры не врежим контроля происходит по сигналу со схе
допуске то на выходе схемы 26 допуско-мы 29 формирования признаков режима, упвых измерителей длительности сигналов от-равляемой коммутатором 28. Этот сигнал -
- .- - логический «О или логическая «1 - поступает на вход управления аналоговых клюказа через блок 15 сбора и запоминания временных отказов появляется сигнал, поступающий на схему 33 памяти. Здесь он 30 чей коммутатора 30. Обработка эталонных фиксируется например, взводит триггер, бло- напряжений, анализ временных параметров кируя прохождение частоты с задающего системы происходит аналогичным образом.
генератора 18. Одновременно индицируется тип отказа на индикаторной панели 34. Это значительно облегчает поиск неисправности, локализуя отказавший узел системы. Анализ управления крайними опорами машины, своевременный запуск и сброс триггеров опор (запуск и отключение двигателей) производится анализатором 14 управления движения. На входы логической схемы 35 анализа сигналов управляемых опор поступает
...
сигнал с триггернои схемы 38 запуска и временные ворота с распределительного бло- ка 22. Анализируются состояния триггеров крайних опор, например, на 7, 45, 50 с дви- жения. В случае несвоевременного включе- ния или отключения опор через распреде- лительный блок 36 выдается сигнал отказа
20
В режиме контроля с блока 27 формирования эталонных напряжений через коммутатор 28 и через коммутатор 30 на формирователь 9 кода отклонения вместо реальных сигналов с датчиков отклонения .-..-... - -
ступают эталонные напряжения. Переход в
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПНЕВМОМАССАЖА | 1993 |
|
RU2061456C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| АВТОМАТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1967 |
|
SU190070A1 |
| Адаптивная система для активного контроля размеров деталей | 1981 |
|
SU998091A1 |
| УНИВЕРСАЛЬНАЯ ЦИФРОВАЯ УПРАВЛЯЮЩАЯ МАШИНА | 1965 |
|
SU170218A1 |
| Устройство для контроля функционирования логических блоков | 1987 |
|
SU1432528A2 |
| Устройство для диагностики неисправностей технических объектов | 1988 |
|
SU1536357A1 |
| Устройство для измерения параметров динамического процесса и управления с самоконтролем | 1986 |
|
SU1495751A1 |
| СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ | 1991 |
|
RU2010327C1 |
| Устройство для централизованного контроля параметров | 1989 |
|
SU1644092A1 |
18
19
П 6лониАовна
20
2i
г
28
29 Т 30
CSpoc
LOpacI
175 /5 3/Г
I
3/Г
oU
зг
33i
г
i©
W/7.
35
4 //or
1
W
-в
| Патент США № 4172551, кл | |||
| Коловратный насос с кольцевым поршнем, перемещаемым эксцентриком | 1921 |
|
SU239A1 |
