Изоб етение относится к автоматике и вычислительной технике и может применяться для автоматизированного контроля преобразователей угла поворота вала в код в статических и динамических режимах с любым выбранным объемом проверок.
Целью изобретения является расширение функциональных возможностей устройства за счет возможности обеспечения как сплошного, так и выборочного Контроля,
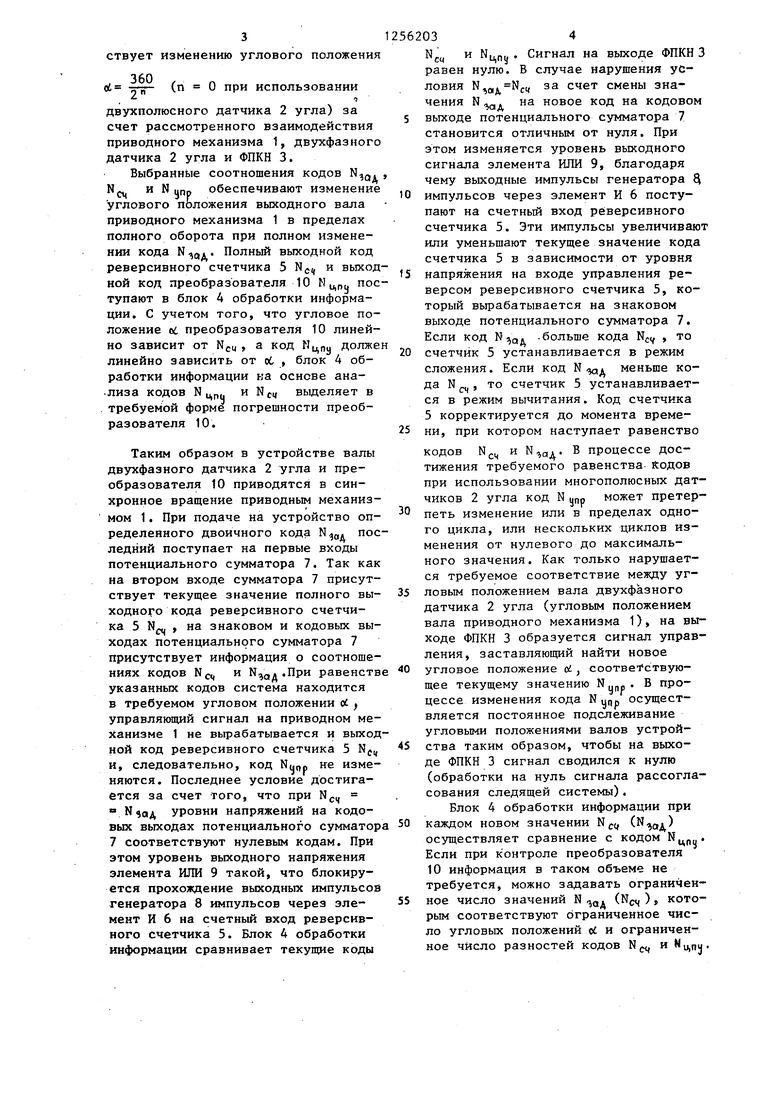
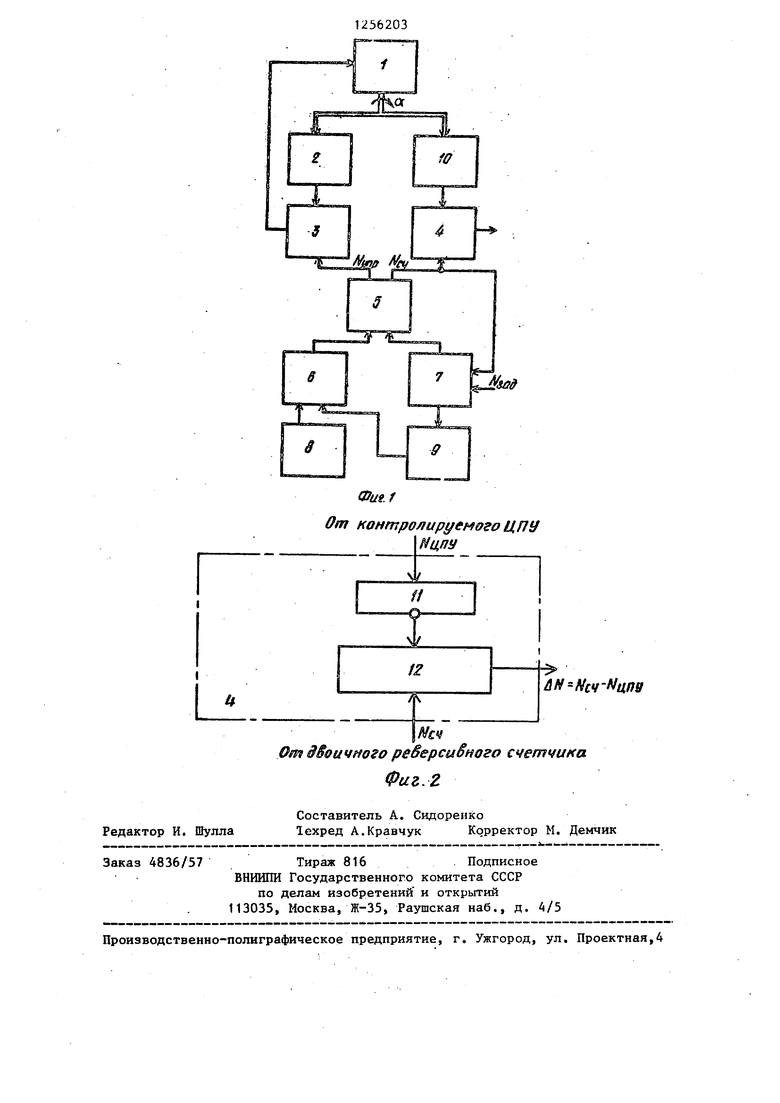
На фиг.1 приведена схема устройства контроля преобразователя угла поворота вала в код, на фиг.2 - пример реализации блока обработки информации .
Устройство контроля преобразователя угла поворота вала в код содержит приводной механизм 1, многополюсный двухфазный датчик 2 угла, функциональный преобразователь 3 кода в напряжение (ФПКН), блок 4 обработки информации, реверсивный счетчик 5, элемент И 6, потенциальный сумматор 7, генератор 8 импульсов и элемент ИЛИ 9, контролируемый преобразователь 10 угла поворота вала в код. Блок 4 обработки информации (фиг.2) вьшолнен в виде узла 11 инверторов и потенциального сумматора 12.
Устройство работает следующим образом.
Приводной механизм 1, датчик 2 угла и ФПКН 3 обеспечивают преобразование входного кода в угловое положение об выходного вала приводного механизма 1. При последовательном во времени изменении кода N,jnn на выходе реверсивного счетчика 5 о нулевого до следующего нулевого выходной вал приводного механизма 1 совершает полный оборот при использовании двухполюсного двухфазного датчика 2 в устройстве или изменяется на угол 360°/1, где i - целое дв ичное число, если в устройстве используется многополюсный датчик 2 угла, электрическая редукция которого характеризуется двоичным число (2,4,8 и т.д.).
Установка выходного вала приводного механизма 1 в угловое положение оЬ приводит к установке в это же время в угловое положение вала контролируемого преобразователя 10 и появлению на выходе последнего соответствующего кода .
В связи с тем, что угловое положение od определяется кодом (то «необходимо по значению входного кода NqoA определенным образом управлять
кодом N unp для установки вала преобразователя 10 в требуемые угловые положения в диапазоне углов.0-360°; При этом одно и то же приращение кода N цпр вызывает разворот выходного
вала приводного механизма 1 на тот или иной угол в зависимости от числа полюсов датчика 2 угла.
Требуемое управление кодом Nynp осуществляется с помощью двоичного
реверсивного счетчика 5, злемен- та.И 6, потенциального сумматора 7, генератора В импульсов и злемен- та ИЛИ 9. Соединение указанных блоков в предлагаемом устройстве обеспечивает режим отслеживания по выходному коду двоичным реверсивным счетчиком 5 входного кода устройства , т.е. выполняется равен- ство ,().. При этом полному.
циклу изменения N, (Oitl,g,1) соответствует определенное число циклов изменения кода Кц„р , определяемое двоичным числом пар полюсов датчика 2 угла и соответствующим числом разрядов двоичного реверсивного счетчика 5. Требуемое число разрядов счетчика 5 (р) определяется, как р m + п, где m - число младших разрядов при двухполюсном двухфазном датчике 2 угла, п - дополнительное число старших разрядов пр и многополюсном двухфазном датчике 2 угла с числом полюсов, равным 2 (п 1,2,3,...).Код
Nijnp в устройстве представляет СОБОЙ код мпадших т-разрядов реверсивного счетчика 5. При двухполюсном датчике 2 угла дополнительные старшие разряды реверсивного счетчика 5 не используются, и код Ниц. оказьгоается равным коду Nf, . При (четырехполюсный датчик 2 угла) максимальное значение кода Nynp уменьшается в два раза по отношению
к NCH и при изменении N от О до 1 код Nunp два раза изменяется от нулевого значения до максимального.
В общем виде число циклов изме- нения Ny. при использовании многополюсных датчиков 2 угла определяется как 2. В свою очередь, полный цикл изменения кода Nupp соответ31256203
ствует изменению углового положения
с
ot
360 2
(п О при использовании
двухполюсного датчика 2 угла) за счет рассмотренного взаимодействия приводного механизма 1, двухфазного датчика 2 угла и ФПКН 3.
Выбранные соотношения кодов N,,
N
и N
обеспечивают изменение
см ijnp углового положения выходного вала приводного механизма 1 в пределах полного оборота при полном изменении кода N,(,.. Полный выходной код реверсивного счетчика 5 , и выходной код преобразователя 10 поступают в блок 4 обработки информации. С учетом того, что угловое положение cd преобразователя 10 линейно зависит от Nc4, а код Нцру долже линейно зависить от Л , блок 4 обработки информации ка основе ана- лиза кодов N ЦР и N,, вьщеляет в требуемой форме погрешности преобразователя 10.
Таким образом в устройстве валы двухфазного датчика 2 угла и преобразователя 10 приводятся в синхронное вращение приводным механизмом 1. При подаче на устройство определенного двоичного кода N, последний поступает на первые входы потенциального сумматора 7. Так как на втором входе сумматора 7 присутствует текущее значение полного выходного кода реверсивного счетчика 5 Nj. , на знаковом и кодовых выходах потенциального сумматора 7 присутствует информация о соотношениях кодов N,. и . .При равенств указанных кодов система находится в требуемом угловом положении оС управляющий сигнал на приводном механизме 1 не вырабатывается и выходной код реверсивного счетчика 5 N,, и, следовательно, код Nu(,n не изменяются. Последнее условие достигается за счет того, что при N уровни напряжений на кодовых выходах потенциального сумматор 7 соответствуют нулевым кодам. При этом уровень выходного напряжения элемента ИЛИ 9 такой, что блокируется прохождение выходных импульсой генератора 8 импульсов через элемент И 6 на счетный вход реверсивного счетчика 5. Блок 4 обработки информации сравнивает текущие коды
сч и цп,| . Сигнал на выходе ФПКН 3
равен нулю. В случае нарушения условия N,(j,.N(.4 за счет смены значения N здд на новое код на кодовом 5 выходе потенциального сумматора 7 становится отличным от нуля. При этом изменяется уровень выходного сигнала элемента ИЛИ 9, благодаря чему выходные импульсы генератора Q
О импульсов через элемент И 6 поступают на счетньй вход реверсивного счетчика 5. Эти импульсы увеличивают или уменьшают текущее значение кода счетчика 5 в зависимости от уровня
S напряжения на входе управления реверсом реверсивного счетчика 5, который вьфабатывается на знаковом выходе потенциального сумматора 7. Если код . -больше кода N,, , то
0 счетчик 5 устанавливается в режим сложения. Если код N , меньше кода N j, , то счетчик 5 устанавливается в режим вычитания. Код счетчика 5 корректируется до момента време5 ни, при котором наступает равенство
кодов Ы(,ц и . В процессе достижения требуемого равенства Кодов при использовании многополюсных датчиков 2 угла код N ,jnp может претер петь изменение или в пределах одного цикла, или нескольких циклов изменения от нулевого до максимального значения. Как только нарушается требуемое соответствие между уг5 ловым положением вала двухфазного датчика 2 угла (угловым положением вала приводного механизма 1), на выходе ФПКН 3 образуется сигнал управления, заставляющий найти новое
0 угловое положение oi, соответствующее текущему значению М„|,„. В процессе изменения кода N yq осуществляется постоянное подслеживание угловыми положениями валов устрой5 ства таким образом, чтобы на выходе ФПКН 3 сигнал сводился к нулю (обработки на нуль сигнала рассогласования следящей системы).
Блок 4 обработки информации при
0 каждом новом значении , (.)
осуществляет сравнение с кодом Nj . Если при контроле преобразователя 10 информация в таком объеме не требуется, можно задавать ограничен5 ное число значений N-jg. ( ), которым соответствуют ограниченное число угловых положений ci и ограниченное число разностей кодов , и Мцпчв устройстве тактовая частота ге нератора 8 импульсов и чаЬтотные свойства следящего привода (приводной механизм 1, датчик 2 угла, ФПКН 3) должны выбираться из условий обеспечения скорости вращения выходного вала приводного механизма 1, соответствующей максимальной рабочей скорости вращения вила преобразователя 10. Использование датчика 2 угла с повыщенным значением электрической редукции повышает точность и разрешаемую способность (дискретность) преобразования кода Ыц„ц в угловое положение об по линейному закону. Точность указанного преобразования зависит от характеристик датчика 2 угла и характеристик ФПКН 3.
Формула изобретения
1. Устройство контроля преобразо вателя угла поворота вала в код,содержащее приводной механизм, кинематически соединенный с контролируемым преобразователем угла поворо та вала в код, генератор импульсов, соединенный с первым входом элемента И, отличающееся тем, что, с целью расширения функциональных возможностей устройства путем обеспечения возможности как сплошного, так и выборочного контроля, в него введены блок обработки информации, функциональный преобразователь кода в напряжение, многополюсный двухфазный датчик угла, реверсивный счетчик, элемент ИЛИ и потенциальный сумматор.
562036
приводной механизм кинематически соединен с валом многополюсного двухфазного датчика угла, выход ко- . торого соединен с аналоговым входом 5 функционального преобразователя кода в напряжение, выход контролируемого преобразователи угла поворота вала в Код соединен с первым входом блока обработки информации, первый
10 выход реверсивного счетчика соединен с вторым входом функционального преобразователя кода в напряжение, выход которого соединен с входом приводного механизма, второй выход
t5 реверсивного счетчика соединен с вторым входом блока обработки ин формации и первым входом потенциального сумматора, первый выход которого соединен с первым входом
20 реверсивного счетчика, а второй выход соединен через элемент ИЛИ с вторым входом элемента И, выход которого соединен с вторым входом реверсивного счетчика, выход блока об25 работки информации является выходом .устройства, второй вход потенциального сумматора является управляющим входом устройства.
2. Устройство по П.1, о т л и30 чающееся тем, что блок обработки информации содержит узел инверторов и потенциальный сумматор, входы узла инверторов являются первым .входом блока обработки информа- , ции, а выходы соединены с первой группой входов потенциального сумматора, вторая группа входов которого является вторым входо блока обработки информации, а выход по- 4Q тенциального сумматора является вы- ходом блока обработки информации.
Фи9. f
От контролируемого ЦПУ Ни,пу
Редактор И. Шулла
Составитель А. Сидоренко
1ехред А.Кравчук Корректор М. Демчик
4836/57
Тираж 816Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
ft -О
UN-Nc4-NunB
счетчика
Фи.г

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1987 |
|
SU1515365A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1751850A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1272506A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1983 |
|
SU1231608A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942091A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1640816A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1979 |
|
SU924736A1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1319226A2 |
Изобретение относится к автоматике и вычислительной технике и может применяться для автоматизированного контроля преобразователей угла поворота вала в код в статических и динамических режимах с любым выбранным объемом проверок. Целью изобретения является расширение функциональных возможностей за счет обеспечения возможности как сплошного,так и выборочного контроля. Для достижения этой цели в устройство контроля преобразователей угла поворота вала в код, содержащее приводной механизм, кинематически связанный с валом контролируемого преобразователя угла поворота вала в код, генератор импульсов и элемент И, введены многополюсный двухфазный датчик угла, функциональный преобразователь кода в напряжение, реверсивный счетчик, потенциальный сумматор, зле- мент ИЛИ, блок обработки информации, содержащий узел инверторов и потенциальный сумматор. Устройство позволяет осуществлять контроль с высокой точностью в полуавтоматическом и автоматическом режимах с применением средств вычислительной техники. 1 з.п. ф-лы, 2 ил. г (Л
| Устройство для определения ошибок преобразователей угол-код | 1973 |
|
SU484548A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1981 |
|
SU970429A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
