11
Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, может.быть использовано в промьшшенных системах воспроизведения движений для управления синхронными и асинхронными корот козамкнутымй двигателями и является усовершенствованием изобретения по авт.св. 1279042.
Цель изобретение - расширение области применения путем обеспечения возможности управления как синхронным, так и асинхронным двигателями.
На фиг.1 представлена функциональная схема электропривода с частотно- токовым управлением; на фиг.2 - схема блока задания амплитуды тока; на фиг.З - схема демультиплексора; на фиг.4 - схема блока согласования частот.
Электропривод с частотно-токовым управлением (фиг.1) содержит двигатель (Д) 1, на валу которого установлен датчик положения (ДП) 2 ротора, усилитель фазных токов (УФТ) 3, подключенньш выходами к обмоткам двигателя 1, а управляющими входами - к выходам блока задания амплитуды тока (БЗАТ) 4, генератор опорной частоты (ГрЧ) 5, выход которого через блок согласования частот (БСЧ) 6 соединен .с входом датчика 2 положения ротора, блок задания начальной фазы (БЗНЧ) 7 подключенный выходом к одному из вхо дов фазосмешающего блока 8, другой вход которого подключен к выходу датчика 2 положения ротора, счетчик 9, подключенный входом к выходу ГОЧ 5, а выходом связанный с первым входом регистра 10, второй вход которого соединен с выходом фазосмещающего блока 8. Выход регистра 10 соединен с входами постоянных запоминающих устройств (ПЗУ) 11 и 12, запрограммированных по законам синусл и косинуса соответственно. Выходы ПЗУ 11 и 12 подключены соответственно к входам цифроаналоговых преобразователей . (ЦАП) 13 и 14, подключенных выходами к опорным входам БЗАТ 4.
В электропривод с частотно-токовым управлением введены сумматор 15 с двумя входами, реверсивный счетчик 16, демультиплексор 17 с управляющим и информационными входами, нуль-орган 18 и преобразователь напряжение- частота (ПНЧ) 19. БЗАТ 4 снабжен дополнительным выходом задания активного тока, подключенным к входам
92262
нуль-органа 18 и ПНЧ 19, при этом сумматор 15 включен по первому входу и выходу между счетчиком 9 и регистром 10,.управляющий вход демульти5 плексора 17 соединен с выходом нуль- органа 18, информационный вход - с выходом ПНЧ 19, а выходы - с входами реверсивного счетчика 16, выходом подключенного к второму входу сумма0 тора 15.
БЗАТ 4 содержит формирователь заданий фазных токов (ФЭФТ) 20 (фиг.2) с информационными и опорными входами и задатчики активной 21 и реактивной
5 22 составляющих тока двигателя 1, выходы которых подключены к информационным входам ФЗФТ 20. Опорные входы ФЗФТ 20 образуют опорные входы БЗАТ 4, основными выходами которого
0 служат выходы ФЗФТ 20, а дополнительным выходом задания активного тока - выход задатчика активного тока 21.
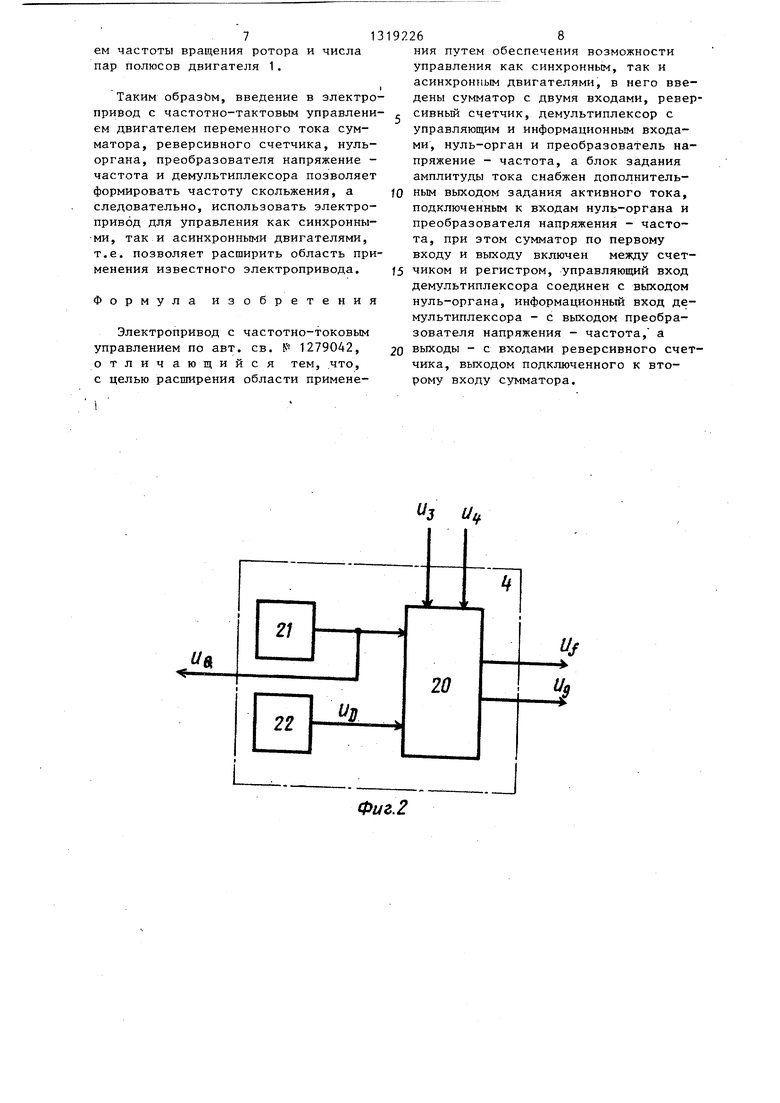
Демультиплексор 17 на два выхода
может быть построен на основе четьфех элементов И 23-26 (фиг.З). Управляющий вход демультиплексора 17 образован входами элемента И 23, а информационный вход - входами элемента И 24.
30 Входы элемента И 25 подключены соответственно к выходам элементов И 23 и 24, а входы элемента И 26 подключены соответственно к выходу элемента И 24 и к входам элемента И 23. Выхо35 ды демультиплексора 17 образованы выходами элементов И 25 и 26.
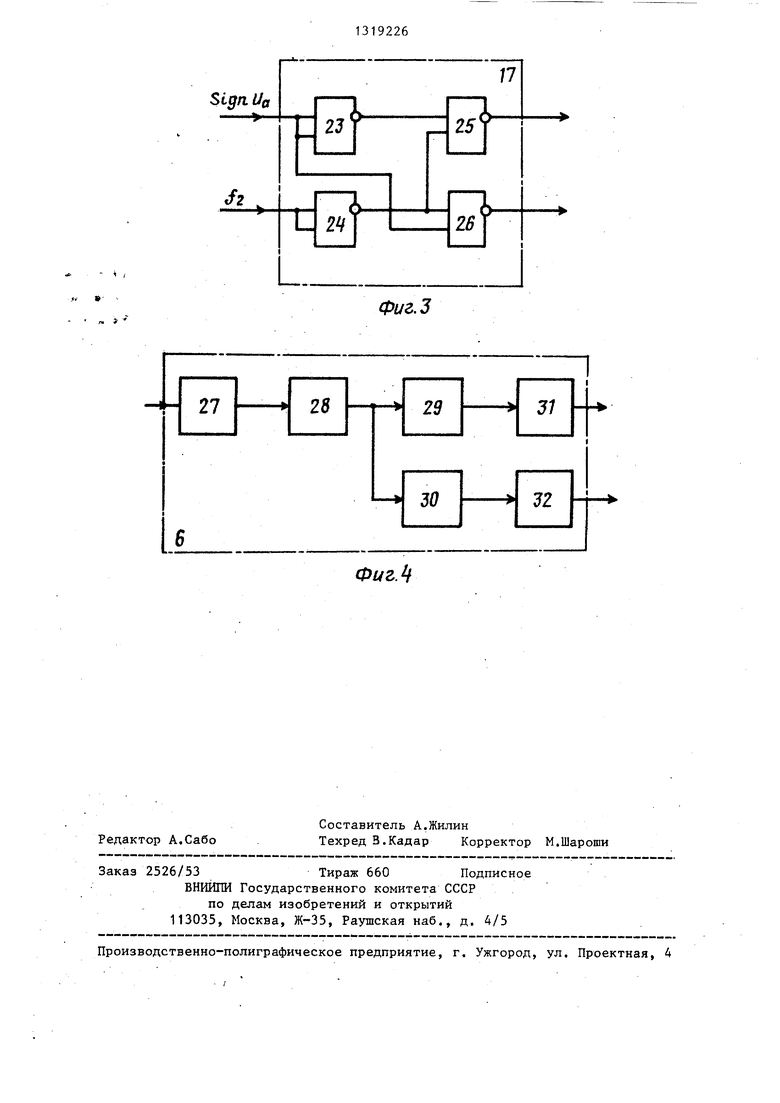
БСЧ 6 может быть вьшолнен по схеме, содержащей делитель 27 частоты (фиг.4), счетчик 28, постоянные запо-
0 минающиё устройства (ПЗУ) 29 и 30, каждое из которых последовательно со- единено с соответствующим ЦАП 31 и 32. Входы ПЗУ 29 и 30 объединены и подключены к выходу счетчика 28, вы45 ходом соединенного с выходом делителя 27 частоты. Вход делителя 27 частоты образует вход БСЧ 6, выходом которого служат выходы ПАП 31 и 32. Делитель частоты 27 может быть собран на циф50 ровых интегральных микросхемах, например по схеме, выполненной на базе динамического D-триггера.
Электропривод с частотно-токовым управлением работает следующим обра-
55 зом.
Статорные обмотки двигателя 1 (в качестве которого может быть использован синхронный или асинхронный двигатель, многополюсньй или с электро-
магнитной редукцией) питаются токами от УФТ 3. ГОЧ 5 вырабатывает прямоугольные импульсы, которые одновременно nocTynarot на вход счетчика 9 и на вход - 6, в котором с помо- щью делителя 27 частоты (фиг.4) производится деление частоты fy на р, где р - коэффициент, равный числу пар полюсов двигателя 1. Последовательность импульсов с выхода делите- ля 27 частоты с частотой f# /р поступает на вход циклически функционирующего счетчика 28, который формирует на своем выходе периодическую последовательность чисел в двоичном коде, определяющих адреса слов, записанных в ПЗУ 29 и 30 по заданной таблице переключений, В ПЗУ 29 и 30 записаны предвари,тельно затабулированные значения функций синуса и косинуса соот ветственно. Закодированные значения этих функций с выхода ПЗУ 29 и 30 поступают в ЦАП 31 и 32, где преобразуются в аналоговые сигналы. Таким образом, на выходе БСЧ 6 формируется требуемая двухфазная система синусо- идальньгх напряжений для обеспечения {работы датчика 2 положения в режиме фазовращателя. Частота этих напряже
НИИ равна , где N - количество
Р- 2 разрядов счетчика 28.
Выходное напряжение датчика 2 положения определяется вьфажением
V4..-n(
где а - номер счетного импульса на выходе счетчика 28, ,2,3,4, ..., 6- угол, равный механическому углу между осью первичной обмотки датчика 2 положения, питающейся нап ,, . ,211 f, ар. ряжением U,. .(-2N г) осью
выходной обмотки.
в момеМты времени t
ик5+в)2
21lf
где ,1,2,3,..., т.е. в моменты смены знака напряжения U с отрицательного на положительный, на выходе фазосмещающего блока 8 формируется
узкий опросный импульс, поступающий
на опорный вход регистра 10. При этом в регистре 10 записывается информация с выхода сумматора 15, в котором происходит суммирование кодов чисел
с fOf52025 0
35
с выхода реверсивного счетчика 16 и с выхода счетчика 9, осуществляющего преобразование последовательности импульсов с частотой f с выхода ГОЧ 5 в последовательность чисел в двоичном коде. Так как счетчик 9 функционирует циклически, одно и то же число на его выходе повторяется через интер2вал времени Т -г, где L - количество
1 разрядов.
Эта периодическая последовательность чисел поступает на первый вход сумматора 15, где получает фазовый сдвиг, определяемый в каждьй момент времени числом с выхода реверсивного счетчика 16, присутствующим на втором входе сумматора 15. После окончания опросного импульса разряды регистра
10Сохраняют информацию о состоянии выходных разрядов сумматора 15, соответствующую моменту времени t до прихода следующего опросного импульса.
С выхода регистра 10 с частотой, соответствующей частоте следования импульсов с фазосмещающего блока 8 на входы ПЗУ 11 и 12 поступают кодированные числа, каждое из которых определяет адрес соответствующего слова, записанного ПЗУ 11 и 12 по заданной таблице переключений. ПЗУ
11и 12 записаны предварительно затабулированные значения функций синуса и косинуса соответственно. Закодированные значения этих функций поступают в ПАП 13 и 14, где преобразуются
в аналоговые сигналы следующего вида:
N
Q и и . 2КТ1+01Н 2 -I. (2) 3 тэ Ч2 -2 iTf J
0
ГС
Q
5
„,« eosl|S 2S|iflE-2.4.(3)
где If - фазовый сдвиг напряжений U , U , определяемый в каждый момент времени числом на выходе реверсивного счетчика 16.
При равенстве, разрядов счетчиков 9 и 28 эти напряжения принимают вид (рв+Ч +2Кр-П); (4) и и cos(pQ+4 +2Kp JT). (5)
4
Напряжения , U поступают на опорные входы БЗАТ, на выходах которого формируются напряжения, задаю- . щие токи в обмотках двигателя 1. Если обмотки двигателя 1 вьтолнены двухфазными, эти напряжения имеют вид
и, U cos (p0+4H-2KpIl)-UQsin.( +if+2Kp3r)(6)
Uq U.. s in (pв-t f -2KpJf) (pe+ +Ц +2КрЛ), . (7)
где Ug,Uj - напряжения задания активной и реактивной составляющих тока двигателя 1, снимаемые с выходов за- датчик 5в активной 21 и реактивной 22 (фиг.2) составляющих тока двигател t соответственно.
В случае применения го-фазного двигателя 1 блок А задания амплитуды тока снабжается преобразователем числа фаз, а усилитель 3 фазных токов
также вьтолняется т-фазным. I ... ,
При Использовании в электроприводе асинхронного двигателя код на выходе реверсивного счетчика 16 изменяется с частотой, определяемой заданной частотой скольжения, которая формируется пропорционально напряжению UQ. Напряжение UQ преобразуется в ННЧ 19 в прямоугольные импульсы с частотой f„, поступающие на информационный вход демультиплексора 17, на управляющий вход которого поступает сигнал sign Ug, формируемый нуль- органом 18 и несущий информацию о знаке напряжения U. При положительтой f 2
подаются
а выхода демультиплексора 17
на вход прямого счета реверсивного счетчика 16, а при отрицательном U(3 - на вход обратного счета реверсивного счетчика 16. С выхода этого счетчика снимается последовательность чисел с частотой f. Знак It
при t соответствует прямому изменению кода (возрастанию числа на выходе реверсивного счетчика 16 с приходом счетного импульса), а знак - обратному изменению кода (уменьшение на выходе реверсивного счетчика 16 с приходом счетного,импульса).
Реверсивный счетчик 16 функционирует циклически, с периодом повторе2
ния кода, на выходе Т , где S - количество разрядов реверсивного счетчика 16, равное количеству разрядов счетчиков 9 и 28. Периоду повторения кода Т соответствует изменение фазы и на 2iT. Для любого
Напряжений U ,
b - номер
момента времени , где
е
счетного импульса на выходе реверсивного счетчика 16, угол, определяющий
фазовый сдвиг напряжений U , Uv, мо- |жет быть найден согласно выражению
i ±22Lfjz
(8)
где
. значение угла ч при f 0. Принимая во внимание то, что0 23 fjp- t+G, где fgp - частота вращения ротора двигателя 1; 6 значение угла б при fgp 0 и. с учетом (8), выражения (6), (7) для К-го момента . . выборки принимают вид.
.cosL23Tp(f ± f
5
(f
К
9Р
(f
0
fc) ±f.)
3
(9)
ftf
+U (f,± f), (10)
где
Q
- fa .
o
5 .Рзаданная частота скольжения, частота напряжения с выхода ДП2 (частота выборок) , Y Ч „- - + 0+2Кр П;
Выражения (9), (10) эквивалентны д выражениям для решетчатых функций, получаемых путем квантования по времени с частотой f.jS напряжений вида
5
,() sinL2Kp(f p±fJt+ ;(11)
и и. sin 2Jip(f,p ± f, )
+U,(fgp±f,)t+y.(12)
При ния по
НИИ Uf
соотношении частоты квантованапряже- /).
.fc
может быть
времени fj и частоты ; , UQ током, что которое практически всегда достигнуто, напряжения U., Ug можно представить в виде (11), (12).
При этом в обмотках двигателя 1 с помощью усилителя фазных токов 3 формируются синусоидальные токи, амплитуда которых определяется сигналами
UGI
и... с выходЬв задатчика активной
;21 и реактивной 22 составляющих тока двигателя 1, а частота - произведени- ем числа пар полюсов двигателя 1 и
0
суммы частоты вращения ротора двигателя 1 и частоты скольжения, задаваемой пропорционально напряжению UQ.
При управлении синхронным двигате- лем коэффициент передачи ПНЧ 19 уста-, навливается равным нулю так, чтобы при любом напряжении UQ частоты f 0. При этом частота токов в обмотках двигателя 1 определяется произведени713
ем частоты вращения ротора и числа пар полюсов двигателя 1.
Таким образЬм, введение в электропривод с частотно-тактовым управлением двигателем переменного тока сумматора, реверсивного счетчика, нуль- органа, преобразователя напряжение - частота и демультиплексора позволяет формировать частоту скольжения, а следовательно, использовать электропривод для управления как синхронны- ми, так и асинхронными двигателями, т.е. позволяет расширить область применения известного электропривода.
Формула изобретения
Электропривод с частотно-токовым управлением по авт. св. 1279042, отличающийся тем, что, с целью расширения области примене21
«
в
22
%
92268
ния путем обеспечения возможности управления как синхронным, так и асинхронным двигателями, в него введены сумматор с двумя входами, реверг сивный счетчик, демультиплексор с управляющим и информационным входами, нуль-орган и преобразователь напряжение - частота, а блок задания амплитуды тока снабжен дополнитель-
0 ным выходом задания активного тока, подключенным к входам нуль-органа и преобразователя напряжения - частота, при этом сумматор по первому входу и выходу включен между счет-
f5 чиком и регистром, управляющий вход демультиплексора соединен с выходом нуль-органа, информационный вход демультиплексора - с выходом преобразователя напряжения - частота, а
0 выходы - с входами реверсивного счетчика, выходом подключенного к второму входу сумматора.
Wj и
/
20
Фиг.2
Sign L/o
ti
L.
П.
,
Редактор А.Сабо
Составитель А.Жилин
Техред З.Кадар Корректор М.Шароши
Заказ 2526/53Тираж 660 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Л
О
1
Фиг.З
Фиг. 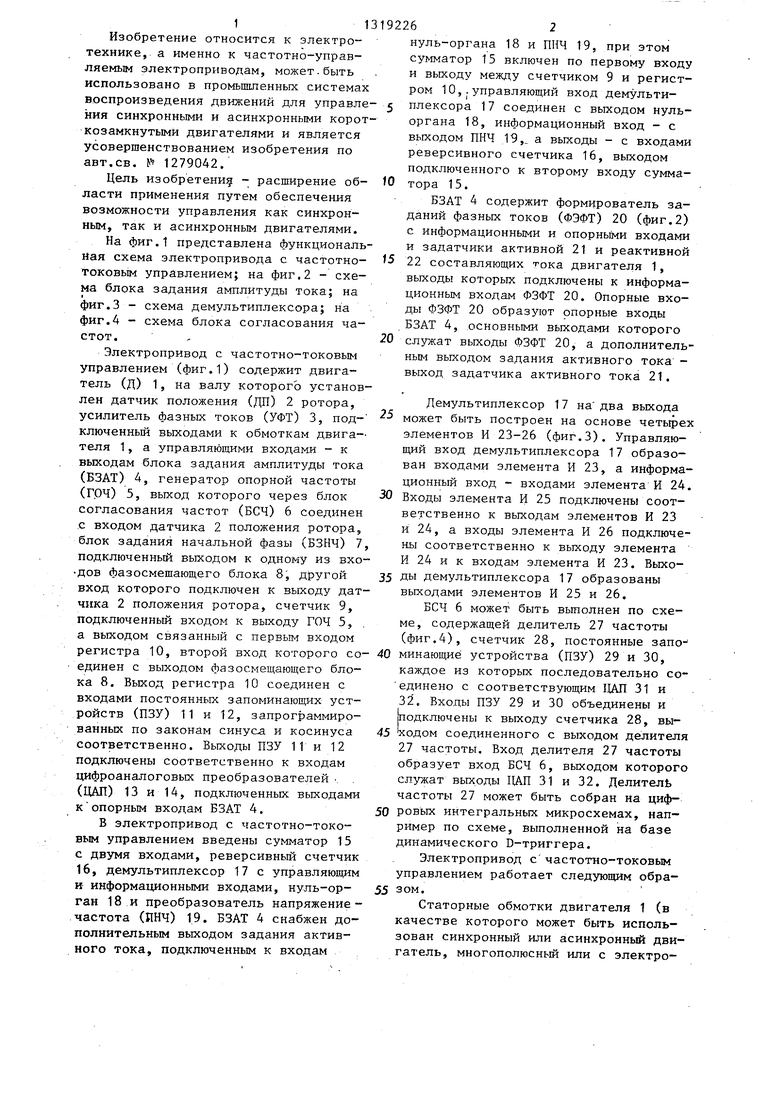


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1279042A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
| Устройство для управления электродвигателем | 1987 |
|
SU1633475A1 |
| Формирователь многофазного синусоидального напряжения для частотно-управляемого электропривода | 1988 |
|
SU1598096A1 |
| Устройство для симметрирования токов трехфазных четырехпроводных сетей | 1990 |
|
SU1758773A1 |
| ЭЛЕКТРОПРИВОД С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2101845C1 |
| Электропривод с частотно-токовым управлением | 1987 |
|
SU1495973A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
Изобретение относится к электротехнике и может быть использовано в промьшшенных системах воспроизведения движений. Цель изобретения - расширение области применения. Указанная цель достигается введением в электропривод с частотно-токовым управлением сумматора (С) 15, -реверсивного счетчика (PC) 16, демульти- плексора (Д) 17, нуль-органа (НО) 18 и преобразователя (ПНЧ) 19 напряжение - частота. Кроме того, блок 4 задания амплитуды тока снабжен дополнительным вьрсодом задания активного тока, подключенным к входам НО 18 и ПНЧ 19. С 15 включен между счетчиком 9 и регистром 10. Второй вход С 15 соединен с выходом PC 16. Управляющий вход Д 17 соединен с выходом НО 18, информационный вход Д 17 - с выходом ПНЧ 19, а выходы - с входами PC 16. Введение указанных блоков позволяет формировать частоту скольжения. Следовательно, появляется возможность управлять как синхронным, так и асинхронным двигателями. 4 ил. I (Л
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1279042A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
