Изобретение относится к электротехнике и может быть использовано для управления электродвигателями, работающими в режиме прерывистых то ков. Целью изобретения является улучшение динамических показателей элек ропривода. На чертеже представлена схема электропривода. Электропривод содержит электродвигатель 1 постоянного тока, якорн обмотка которого подключена к преобразователю 2 напряжения, последовательно связанные блок 3 задания, регулятор 4 скорости, усилитель 5 с переменным коэффициентом усиления, регулятор 6 тока, выход которого соединен с входом преобразователя 2 напряжения, датчик 7 тока и датчик 8 скорости, выходы которых подключе ны к входам соответствующих регулят ров 6 и 4. Кроме того, электроприво содержит два управляемых ключа 9 и 10, фильтр 11, первый интегратор 12, последовательно соединенные узе 13 сравнения и усилитель 14 и после довательно соединенные компаратор 15, второй интегратор 16 и линейный модулятор 17, первый вход узла 13 сравнения соединен с выходом регуля тора 4 скорости, второй вход - с вы ходсмч первого интегратора 12, вход которого соединен с выходом усилите ля 14, подключенным к первому входу усилителя 5 с переменньм коэффициен том усиления, второй вход которого подключен к выходу линейного модуля тора 17, выход усилителя 5 с переме ным коэффициентом усиления через фильтр 11 и первый ключ 9 соединен с вторым входом регулятора 6 тока, выход регулятора 4 скорости через второй ключ 10 соединен с третьим входом регулятора 6 тока, управляющие входы ключей 9 и 10 соединены с выходом компаратора 15, вход кото рого соединен с датчиком 7 тока. Электропривод работает следующим образом. Показатели качества переходного процесса электропривода в режиме непрерывных токов выше, чем в режим прерывистого тока. Для получения ан логичных показателей качества для режима прерывистых токов необходимо корректирующее устройство, характеристика которого изменялась бы в зависимости от угла проводимости. Передаточная функция такого устройства определяется вычитанием из ЛАЧХ в режиме непрерывных токов ЛАЧХ в режиме прерывистых токов и имеет передаточную функцию вида Т т. 1 г ( +1) ТтГР+1) (TjF+lXTjP+l) где Т - первая точка перегиба ЛАЧХ корректирующего устройства, изменяющаяся с изменением угла проводимости L С изменением jl изменяется ордината второй точки перегиба ЛАЧХ корректирукяцего устройства, которая определяется Ig k (k -. коэффициент усиления устройства). Построив ряд ЛАЧХ.корректирующего устройства для различных углов проводимости J можно определить ординаты L и построить функцию k f(j) по точкам, представляющую собой зависимость, близкую к гиперболической. Для определения функции (A), аппроксимируем полученный график, прологарифмировав координаты точек ,кривой () и построив график En k :f(tn).. Функция k fU) описывается зависимостью k h/AS г-де h - постоянная величина, которая представляет коэффициент аппроксимации кривой (J) и вычисляется по формуле h eS где Ь - ордината точки пересечения прямой ; in (In ) с осью ординат, Л- угол проводимости. В режиме непрерывных токов замкнут ключ 10 и работает традиционная система подчиненного регулирования. В режиме прерывистых токов в якорной цепи электродвигателя 1 появляются импульсы тока. С датчика тока 7 поступают сигналы, соответствующие длительности импульсов тока якорной цепи на компаратор 15, который преобразует эти сигналы в прямоугольные импульсы. Одной полярностью этого импульса, соответствующей по ширине длительности угла проводимости тоа ,Л , управляется ключ 10, другой люч 9, кроме того, сигнал используется интегратором 16 с заземленной емкостью для получения сигнала соотетствующего по уровню длительности гла проводимости тока Д . Интегратор 16 интегрирует до тех пор, пока есть импульс тока, в течение паузы интегратор запоминает последнее значение. С появлением нового импульса происходит сброс интегратора и цикл повторяется.
Таким образом, линейный модулятор 17 к началу паузы имеет аналоговую информацию о длительности предшествующего импульса тока и выдает сигнал (например, световой поток), пропорциональный длительности тока Л, который изменяет крэффициент усиления усилителя 5 по формуле h/Jl, в качестве которого может быть использован операционный усилитель, .в обратную связь которого включен полевой фототранзистор, имею1ций зависимость сопротивления от светового потока, близкую к гиперболической.
В бестоковую паузу, следующую за импульсом тока, ключ 10 размыкается ключ 9 замыкается, система электропривода работает с адаптивным регуляторо-м скорости. При появлении следующего импульса тока система электропривода возвращается в исходное состояние и до появления следующей паузы работает как в режиме непрерывных токов.
Формула изобретения
Электропривод, содержащий электродвигатель постоянного тока, якорная обмотка которого подключена к преобразователю напряжения, последовательно связанные блок задания, регулятор ;скорости, усилитель с переменным
коэффициентом усиления, регулятор тока, выход KOTopofo соединен с входом преобразователя напряжения, датчики тока и скорости, выходы которых подключены к входам соответствукяцих регуляторов, отличающийся
ческих показателей электропривода, в него введены два управляемых ключа фильтр, первый интегратор, последовательно соединенные узел сравнения и Усилитель и последовательно соединенные компаратор, второй интегратор и линейный модулятор, первый вход узла сравнения соединен с выходом регулятора скорости, второй вход - с выходом первого интегратора, вход, которого соединен с выходом усилителя, подключенным к первому входу усилителя с переменным коэффициентом усиления, второй вход которого подключен к выходу линейного модулятора выход усилителя с переменным коэффициентом усиления через фильтр и первый ключ соединен с вторым входом регулятора тока, выход регулятора скорости через второй ключ соединен с третьим входом регулятора тока, упг равляющие входы ключей соединены с выходом компаратора, вход которого соединен с датчиком тока, причем переменный коэффициент усиления усилителя изменяется по закону
-|.
где k - коэффициент усиленияj h - постоянная величина; Л - угол проводимости,
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1983 |
|
SU1228194A1 |
| Электропривод постоянного тока | 1981 |
|
SU970617A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
| СХЕМА ПИТАНИЯ ЭЛЕКТРОПРИВОДА СО СГЛАЖИВАЮЩИМ ДРОССЕЛЕМ В ЦЕПИ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2224350C2 |
| СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРАМИ В РЕВЕРСИВНОМ ТРЕХФАЗНОМ ТИРИСТОРНОМ ЭЛЕКТРОПРИВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2498493C2 |
| Устройство для регулирования напряжения генератора | 1988 |
|
SU1669074A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Вентильный электропривод постоянного тока | 1983 |
|
SU1098096A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателей, работающих в режиме прерывистых токов. Улучшение динамических показателей электроприводаобеспечивается за счет того, что в устройство введены два управляемых ключа 9,10, фильтр 11, первый интегратор 12, последовательно соединенные узел сравнения 13 и усилитель 14 и последовательно соединенные компаратор t5. второй интегратор 16 и линейный модулятор 17. Перклй вход узла сравнения 13 соединен с выходом регулятора скорости 4, второй вход - с выходом первого интегратора 12, вход которого соединен с выходом усилителя 14, -, подключенным к первому входу усилителя 5 с переменным коэффициентом усиления, второй вход которого подключен к выходу линейного модулятора 17. &дход усилителя 5 с переменным коэффициент усиления через 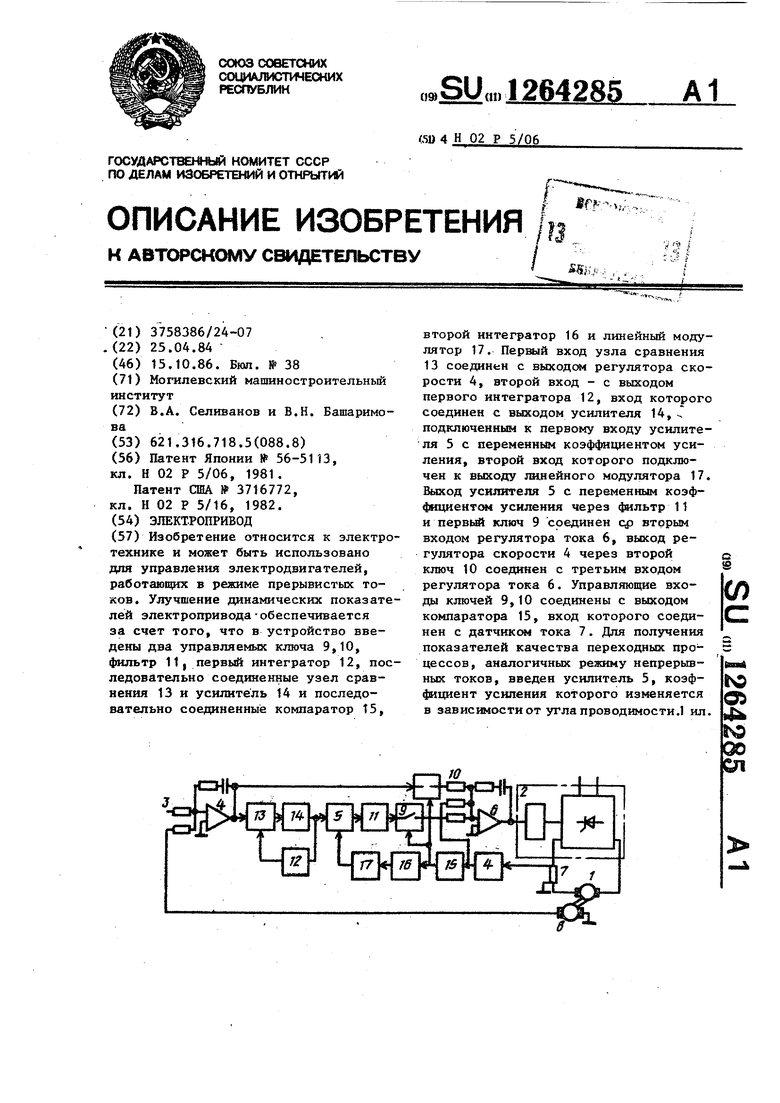
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 3716772, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
