(54) ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1983 |
|
SU1228194A1 |
| Регулируемый электропривод постоянного тока | 1981 |
|
SU968881A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU729803A1 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU1010711A2 |
| Устройство для компенсации эксцентриситета валков при автоматическом регулировании толщины полосы | 1982 |
|
SU1033247A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157327C1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
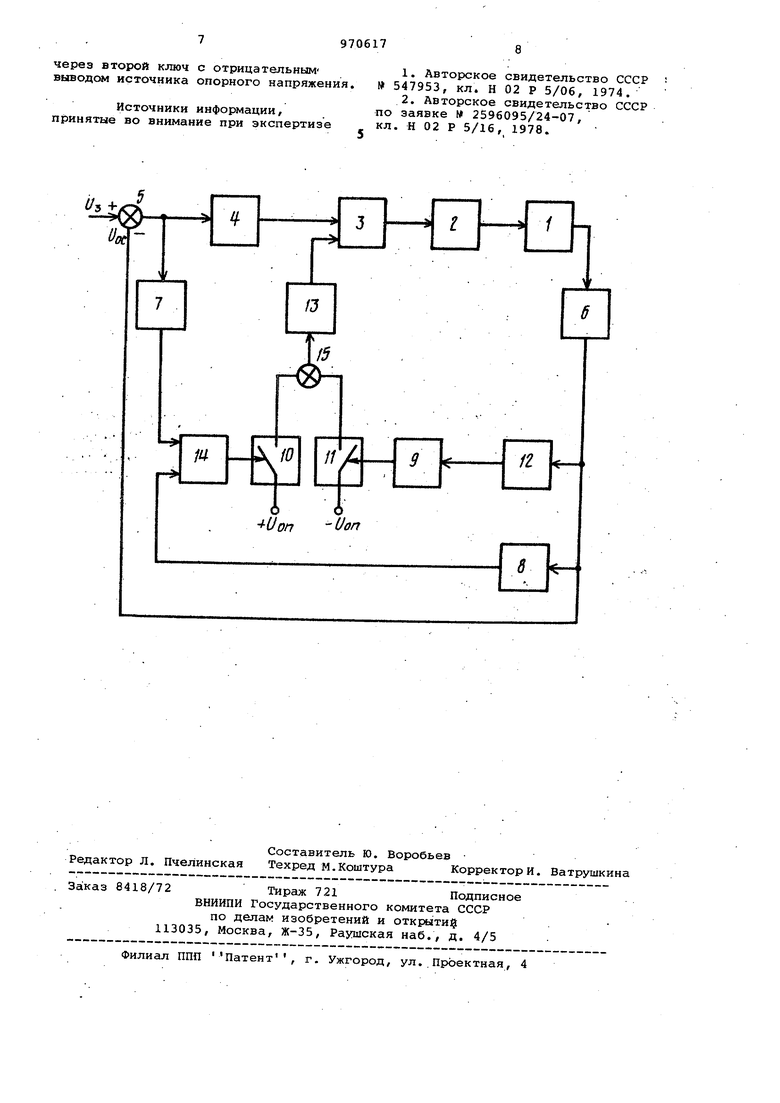
. Изобретение относится к электротехнике и может быть использовано в электроприводах машин термической резки и станков с числовым программн управлением. Известно устройство для управлени электродвигателем постоянного тока, содержащее регулятор скорости, ревер сивный импульсный преобразователь, вход которого связан с выходом регулятора скорости, и двигатель, с которым соединен скорости, при этом выход датчика скорости подключен к входу регулятора скорости 1. Недостаток такого устройства - необходимость перенастройки величины сигнала, осуществляющего вибрационную линеаризацию при импульсном управлении .в случае изменения момента статической нагрузки на валу электро двигателя. Следовательно, данным устройством не может осуществляться полная линеаризация зоны нечувствительности электродвигателя в тех слу чаях, когда изменения момента статической нагрузки происходят в процессе/работы электропривода, а значит снижается быстродействие на малых скоростях и существенно сужается диапазон регулирования частоты вращения. Наиболее близок к предлагаемому электропривод постоянного тока, содержащий электродвигатель постоянного тока, к якорной обмотке которого подключены последовательно соединенные импульсный преобразователь, модулятор, регулятор скорости и сумматор, второй вход которого соединен с датчиком скорости 2. Известное устройство позволяет линеаризовать зону нечувствительности электродвигателя, а следовательно, расширить диапазон регулирования частоты вращения только в тех системах, в которых возможно непосредственное измерение момента статической нагрузки на валу электродвигателя (как вращающегося, так и подвижного). Однако распоространены системы, в которых момент статической нагрузки создается сухим трением, и, следовательно, непосредственное измерение момента статической нагрузки на валу неподвижного электродвигателя не представляется возможным. В таких системах вышеуказанное устройство не позволяет расширить диапазон регулирования частоты вращения. Цель изобретения - расширение ди апазона регулирования частоты враще ния электродвигателя. Поставленная цель достигается те что в электропривод дополнительно введены три компаратора, два ключа, фильтр, интегратор, схема совпадени второй сумматор и источник опорного напряжения, причемвход первого ком паратора соединен с выходом первого сумматора, а его выход - с первым входом схемы совпадения, второй вход которой через второй компаратор соединен с выходом датчика скорюсти, который соединен с последовательно Соединенными фильтром и третьим ком паратором, выход которого соединен с управляющим входом второго ключа, управляющий вход первого ключа соединен с выходом схемы совпадения, второй вход модулятора соединен че рез .интегратор с выходом второго сум матора, один вход которого через пер вый ключ соединен с положительньам выходом источника опорного напряжения, а второй вход - через второй .ключ с отрицательным выводом источника опорного напряжения. На чертеже приведена принципиальная схема устройства. Электропривод постоянного тока содержит последовательно соединенные электродвигатель 1 постоянного тока импульсный, преобразователь 2, модулятор 3, регулятор 4,скорости, сумматор 5, второй вход которого соединен с датчиком 6 скорости, компараторы 7-9, ключи 10 и 11, фильтр 12, интегратор 13, .схему 14 совпадения, сумматор 15 и источник опорного напряжения, причем вход компаратора 7 соединен с выходом сумматора 5, а его выход - с первым входом схемы 14 второй вход которой через компаратор 8 соединен О выходом датчикс1 б, кото рый соединен с последовательно соединенными фильтром 12 и компаратором 9, выход которого соединен с управляющим .входом ключа 11, управля ющий вход ключа 10 соединен с выходом схемы 14, второй вход модулятора 3 соединен через интегратор 13 с выходом сумматора 15, один вход коiToporo соединен через кдроч 10 с поло жительным выводом источника опорного напряжения, а второй вход - через ключ 11 с отрицательным выводом источника опорного напряжения. Устройство работает следующим об разом. При отсутствии сигнала из, сигнал на выходе сумматора 5 равен нулю, а значит равен нулю-и сигнал на выходе регулятора 4 скорости. При этом модулятор 3 генерирует последователь ность двухполярных импульсов, у кото рой длительность положительного импульса равна длительности отрицатель ного импульса, и, следовательно, постоянная составляющая этого сигнала равна 0. Этот выходной сигнал модулятора 3 усиливается импульсным преобразователем 2 и поступает на электродвигатель 1, который остается неподвижным, так как равна нулю постоянная составляющая напряжения подаваемого на него. При этом нулевой сигнал на выходе сумматора 5 на выходе компаратора 7 поддерживает сигнал,запирающий схему 14 совпадения и, таким образом, размыкающий ключ 10. Аналогично нулевой сигнал на выходе датчика б скорости выходной сигнал компаратора 9 размыкает ключ 11. таким образом, выходной сигнал сумматора 15 равен нулю, а значит равен нулю и выходной сигнал интегратора 13. Модулятор 3 настраивается таким образом, что при нулевом сигнале на его входе управления частотой следования импульсов частота импульсной последовательности на его выходе устанавливается равной максимальной частоте таи г которая выбирается из соотношения 2Wn,inT9 где f плох максимальная частота работы модулятора 3; . Mf - минимальный возможный для данной системы момент статической нагрузки на валу электродвигателя 1; Tq - постоянная времени якорной цепи электродвигателя 1. При такой частоте пульсации тока незначительны, а значит незначительны и дополнительные потери мощности в неподвижном электродвигателе,1. Как только на вход системы поступает сигнал задания U, на выходе сумматора 5 появляется напряжение, которое, пройдя через регулятор 4 скорости, изгленяе.т соотношение между длительностями положительных и отрицательных импульсов на выкоде модулятора 3, поэтому в напряжении, поступающем на вход электродвигателя, появляется постоянная составляющая. Одновременно с этим появляется сигнал на выходе.компаратора 7, который открывает схему 14 совпадения и, Tstv; самым, замыкает ключ 10. При этом опорное напряжение положительной полярности +Ugr,4epe3 сумматор 15 поступает на вход интегратора 13, и значит напряжение на его выходе начинает линейно возрастать. Пропорционально этому изменению напряжения на входе управления частотой следования импульсов модулятора 3 начинает уменьшаться частота импульсной последовательности на его выходе. Это уменьшение частоты импульсной последовательности продолжается до тех пор, пока на некоторой частоте ,, не про-, изойдет полная линеаризация зоны нечувствительности характеристики электродвигателя. Эта частота определяется следующим образом.
-±. .,т,еп(.-).
П М П /
де Т., - постоянная времени якорной
цепи;
- сопротивление якорной цепи C|v| - конструктивная постоянная
электродвигателя 1; Up - амплитуда напряжения на
якоре;
Mj, - установившийся момент статической нагрузки на валу электродвигателя 1.
Кактолько произойдет линеаризация нелинейности, эл;ектродвигатель I начинает движение при любой малой постоянной составляющей напряжения, подаваемого на него. При этом на выходе датчика 6 скорости появляется сигнал срабатывает компаратор 8 и закрывает схему 14 совпадения, ключ 10 размыкается и отключает напряжение +Uof, от входа интегратора 13. Выходной сигнал интегратора 13 перестает меняться, и на выходе модулятора 3 поддерживается такая частота, при которой линеаризуется зона нечувствительности электродвигателя 1, обусловленная наличием момента статической нагрузки на его валу.
При увеличении момента статической нагрузки на валу электродвигателя 1 в процессе его работы возможна остановка электродвигателя 1 из-з расширения зоны нечувствительности. В этом случае на выходе датчика б скорости появляется нулевой сигнал, который через компаратор 8 открывает схему 14 совпадения и замыкает ключ 10.Сигнал на выходе интегратора 13 н чинает снова возрастать до тех пор, пока в- системе не будет подобрана новая частота, при которой произой- дет линеаризация ёоны нечувствительности , обусловленной новой величиной момента статической нагрузки на валу и, следовательно, пока электродвигатель 1 не тронется.
При уменьшении статической нагрузки на валу электродвигателя 1 на его выходе появляются пульсации скорости с частотой работы модулятора 3. Эти пульсации скорости выделяются с помощью фильт эа 12. Полоса пропускания которого настраивается в соответстВИИ с частотным диапазоном модулятора 3.
При превышении пульсации скорости заданного уровня, определяемого-техническим заданием на систему регулирования, срабатывает компаратор 9 и замыкает ключ 11. При этом опорное .напряжение отрицательной полярностиUgrtчерез сумматор 15 поступает на вход интегратора 13, вызывая линейное убывание сигнгипа на его выходе, вследствие чего частота следования импульсов модулятора 3 начинает возрастать до тех пор, пока уровень пульсаций скорости электродвигателя 1 снизится до заданно.го значения. После этого сигнал на выходе компаратора 9 исчезает и ключ 1 размыкается..
Таким образом в предлагаемом устройстве автоматически поддерживается такая частота импульсов, подаваемых на электродвигатель, при которой, с одной стороны, осуществляется вибрационная линеаризация зоны нечувствительности электродвигателя при различных моментах статической нагрузки на его валу, а с другой, уровень пулсаций скорости не превшиает заданного значения. Благодаря этому существенно расширяется диапазон регулирования частоты вращения электродвигателя, причем нет необходимости в непосредственном измерении момента статической нагрузки на валу электрюдвигателя.
Формула изобретения
Электропривод постоянного тока, содержащей электродвигатель постоянного тока, к якорной обмотке которого подключены последовательно соединенные импульсный преобразователь, модулятор, регулятор скорости и сумматор, второй вход которого соединен с датчиком скорости, о т л и ч а ющ и и с я тем, что, с целью расширения диапазона регулирования частоты вращения электродвигателя, в него . дополнительно введены три компаратора,два ключа, фильтр, интегратор, схема сов.падения, второй сумматор и источник опорного напряжения, причем вход первого компаратора соединен с выходом первого сумматора, а его выход - с первым входом схемы совпадения, второй вход которой через второ компаратор соединен с выходом датчика скорости, который соединен также с последовательно соединенньми фильтре и третьим компаратором, выход которого соединен с управляющим входом второго ключа, управляющий вход первого ключа соединен с выходом схемы совпадения, второй вход модулятора соединен через интегратор с выходом второго сумматора один вход которого соединен через первый ключ с положительным выводом источника опорного напряжения, а второй вход через второй ключ с отрицательнымвыводом источника опорного напряжения. Источники информации, принятые во внимание при экспертизе -40One1 1. Авторское свидетельство СССР 547953, кл Н 02 Р 5/06, 1974. 2. Авторское свидетельство СССР по заявке 2596095/24-07, кл. Н 02 Р 5/16, 1978.
