, 113
Изобретение относится к автоматике и может быть использовано для управ- ления промышленными электроприводами.
Цель изобретения - повышение качества управления при использовании в качестве усилителя мощности управляемого вьшрямителя.
Возможности достижения положительного эффекта при использовании предлагаемой самонастраивающейся системы управления вытекают из следующего анализа.
Среднее значение тока якоря в многофазных схемах вьшрямления определя
ется выражением
ср
де tx: Е.
Е R
.ШЗ-Гк 2 2 «RL А
Sin
-Т,
/ г - л IT
г cos (-- j -ы)-Е / m /
(1)
угол управления; амплитудное значение фазы питающего напряжения; ЭДС двигателя;
активное сопротивление якорной цепи электропривода;
го - число фаз питающего напряжения;
LJ, - среднее значение тока якоря на интервале дискретности управляемого выпрямителя; - длительность импульса тока якоря.
20
m
В зоне прерывистого тока (область малых значений нагрузки на валу дви- Анализ уравнения (7) показывает, гателя) индуктивность L якорной цепи что изменение сигнала о на входе электропривода косвенно через пара- 35 управляемого выпрямителя обратно про- метр Ti влияет на среднюю величину то- порционально величине f(, K) и обеспе- ка IPO якоря, обеспечивая нелинейную
ср
от угла ot/ управления
-со якоря зависимость I
и длительности Я импульса тока.
27 В зоне непрерывного тока i - и
щ
среднее значение 1,. тока якоря определяется при прочих равных условиях величиной R. При зтом индуктивность L якорной цепи проявляет себя по отношению к Ijjp как апериодический фильтр первого порядка с постоянной
чивает независимость величины I., от
ср
параметра Л , следствием чего является независимость динамики системы управ40 ления от величины статического момента на валу двигателя, т.е. от характера тока в якорной цепи вентильного электропривода.
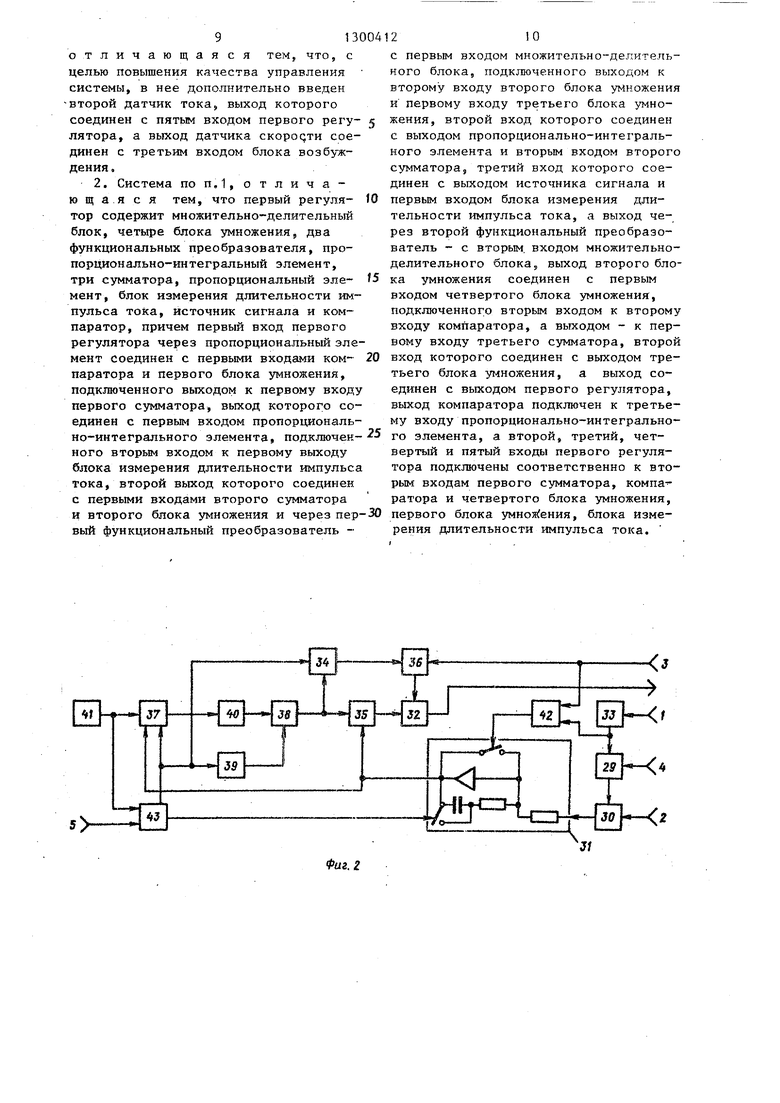
На фиг.1 изображена функциональная
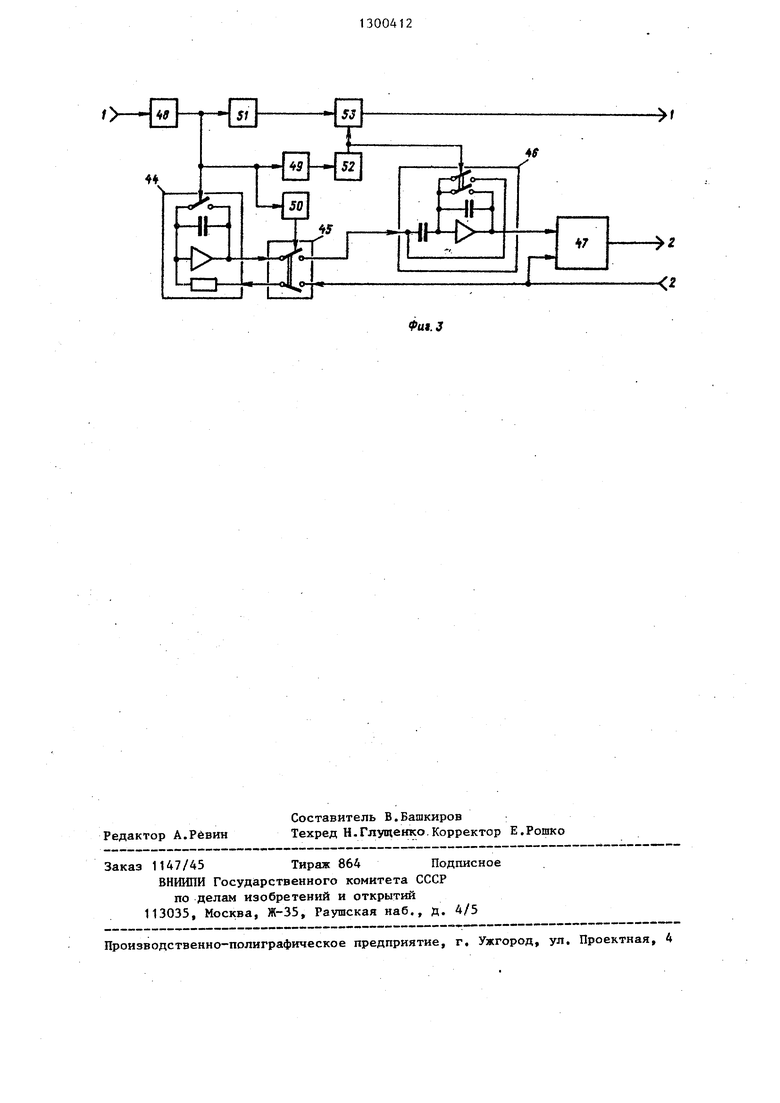
45 схема самонастраивающейся системы управления; Hai фиг. 2 - функциональная схема первого регулятора ; на фиг.З - схема одного из возможньк вариантов реапизации блока измерения длительновремени . С учетом изложенного,
уравнение (1) в зоне непрерывного тока примет вид:
Ё Icp.(t)
d t
+ Icp (t)|(E,-E),
(2)
- sin r; coso6 , (3)
8 m-fr m
где Ед - ЭДС управляемого выпрямителя.
Сравнение уравнений (1) vi (2) показывает, что в зоне прерывистого тока ЭДС управляемого выпрямителя определяется уравнением
I
COS
м-.
(4)
a среднее значение тока якоря для за- данных значений Eg и Е определяется сопротивлением якорной цепи, значение которого определяется уравнением
R
. (5) т
Нелинейная зависимость величин Е
&
и R , от параметра 7i дестабилизирует динамику системы при работе в зоне прерывистого тока (при работе в зоне малых нагрузок на валу двигателя).
Анализ уравнения (1) показывает, что если на вход управляемого выпрямителя подать положительный сигнал
и.
Е
EL
Е 2Ё„
(6)
5
-в --т f(oi,l)
ТО среднее значение тока якоря перестанет зависеть от величины Е и будет определяться уравнением
Em га
0
где
I,.|f(c.,7.), (7) f(oi, A)si4cos(- - -об). (8)
m
Анализ уравнения (7) показывает, что изменение сигнала о на входе 5 управляемого выпрямителя обратно про- порционально величине f(, K) и обеспе-
Анализ уравнения (7) показывает, что изменение сигнала о на входе 5 управляемого выпрямителя обратно про- порционально величине f(, K) и обеспе-
чивает независимость величины I., от
ср
параметра Л , следствием чего является независимость динамики системы управ0 ления от величины статического момента на валу двигателя, т.е. от характера тока в якорной цепи вентильного электропривода.
На фиг.1 изображена функциональная
5 схема самонастраивающейся системы управления; Hai фиг. 2 - функциональная схема первого регулятора ; на фиг.З - схема одного из возможньк вариантов реапизации блока измерения длительно0 сти импульса тока.
Самонастраивающаяся система управления содержит первый сумматор 1, первый регулятор 2, усилитель 3 мощнос- ти, электродвигатель 4, первый датчик 5 тока, датчик 6 скорости, датчик 7 ЭДС, датчик 8 тока возбуждения, упругую механическую передачу 9, технологический механизм 10, датчик 11 CKO-I
313
роста механизма, блок 12 возбуждения датчик 13 упругого момента, задатчик 14, первый- 15, второй 16 и третий 17 интеграторы, второй 18, третий 19, четвертый 20 и пятый 21 сумматоры, обмотку 22 возбуждения, первый 23, второй 24 и третий 25 корректирующие усилители, коммутатор 26, второй регулятор 27 и второй датчик 28 тока.
Первый регулятор 2 содержит первый блок 29 умножения, шестой сумматор 30, пропорционально-интегральный элемент 31, седьмой сумматор 32, пропорциональный элемент 33, второй 34, третий 35 и четвертый 36 блоки умножения, восьмой сумматор 37, множитель но-делительный блок 38, первый 39 и второй 40 функциональные преобразователи, источник 41 сигнала, компаратор 42 и блок 43 измерения длительности импульса тока.
Блок 43 измерения длительности импульса тока содержит четвертый интегратор 44, второй коммутатор 45, блок 46 памяти, девятый сумматор 47, второй компаратор 48, первый 49 и второй 50 мультивибраторы, первый 51 и второй 52 элементы НЕ, триггер 53.
Элементы фиг.1 (за исключением элементов 2,12 и 28) и их связи являются признаками основного изобретения и обеспечивают работу устройства в соответствии с описанием основного изобретения.
о
Первый регулятор 2 в диапазоне рабочих нагрузок двигателя решает задачи, предусмотренные, в основном изобретении. В зоне малых нагрузок, когд в цепи якоря наблюдается прерьшистый (ГОК, он дополнительно обеспечивает стабилизацию динамики системы управления в условиях, когда меняются ее параметры. ,
Блок 12 возбуждения решает те же задачи, что и в основном изобретении Конструтктивное отличие его заключается в том, что вход функционального преобразователя блока 12 можно с по- мощью дополнительно введенного коммутатора переключать со второго входа блока 12 на его третий вход. Это поз- воляет при больших динамических ошиб- ках по скорости осуществлять ослабление потока возбуждения двигателя в функции сигнала, пропорционального , ; фактическому значению скорости двигателя, что позволяет более полно ис
oi fTci, Oi)
пользовать ресурсы двигателя по напряжению якоря.
Второй датчик 28 тока отличается от первого датчика 5 тока основного изобретения тем, что имеет более высокий коэффициент передачи и обеспечивает на своем выходе сигнал,пропорциональный току якоря только в области малых токов, соответствующих зоне прерывистого тока с некоторым превы- шением последней. При дальнейшем увеличении тока якоря выходной сигнал второго датчика 28 тока ограничивается на достигнутом уровне.
Самонастраивающаяся система управления работает следующим образом.
Блоки 29 и 34 - 36 умножения обес цечивают на своих выходах сигналы, пропорциональные произведению сигналов, поступающих на их входы.
На выходе второго блока 34 умножения формируется сиграл, пропорциональный величине
Д 1
2E; fU,i)На выходе третьего блока 35 умножения формируется сигнал, пропорциональный величине
об
fCoc.,)
На вькоде четвертого блока 36 умножения формируется сигнал, пропорциональный величине
Ik
(oi, A)
Сумматоры 30, 32 и 37 обеспечивают суммирование сигналов, поступающих на их входы. При этом сигналы, поступающие на второй вход сумматора 30 и на первый и второй входы сумматора 37, суммируются с обратными знаками. На выходе сумматора 30 формируется сигнал задания на ток якоря. На выходе сумматора 37 формируется сигнал .пропорциональньй величине
На выходе сумматора 32 формируется сигнал,пропорциональный величине
. Т .Е 1
гл
-6..1 .Q.
fCoi,)- ZEjffe,)
oi fTci, Oi)
Пропорционально-интегральный элемент 31 обеспечивает пропорционально интегральное преобразование сигнала, поступающего на его первый вход, если .на втором и третьем входах наблюдают513004126
ся нулевые значения сигналов. Присут- и
величине -..На первый и второй входы ствие сигнала на втором его входеm
блокирует интегральную составляющуюблока 43 поступают соответственно
закона преобразования. Присутствиесигналы, пропорциональные току якоря
сигнала на третьем его входе обеспе- 5
чивает нулевой сигнал на выходе неза-и величине -.
висимо от уровня сигнала, поступающе- Статическое состояние блока 43 изго на его первьй вход. Переход с про- ерения- длительности импульса тока
порционально-интегрального законанаблюдается когда система работает
преобразования на пропорциональный и
4 I , , непрерывными токами якоря и харакнаоборот осуществляется соответствен- ер зуется тем, что на выходе компа- но в моменты поступления и снятия сиг- g .блюдается сигнал, а вы- нала, на .втором входе элемента 31. Ну- сигналы интегратора 44, блока
левой сигнал на выходе элемента 31/t /п
памяти первого мультивибратора 49
обеспечивается спустя небольшой про- - со„
и триггера 53 равны нулю. На выходе межуток времени после поступления сиг-, -, ,
сумматора 47 наб.пюдается сигнал, пронала на его третий вход. Снятие сиг-
нала с третьего входа элемента 31 вы- порциональный величине -.
зывает немедленную реакцию элемента
31 на сигнал, поступающий на его пер-20 Динамический режим блока измерения
вый вход.длительности импульса тока наступает
Множительно-делительный блок 38 в момент появления паузы (значение обеспечивает на своем выходе величи- тока равно нулю) в токе якоря, В ука- ну, обратную произведению сигналов, занный момент выходной сигнал компа- поступающих на его входы. Выходной ратора 48 принимает нулевое значение сигнал.множительно-делительного блока и вызывает появление сигналов на вы- пропорционален величинеходах мультивибратора 49 и триггера
53, что деблокирует блок 46 памяти и
--гГ-.обеспечивает интегратору 44 возмож 30 ность интегрировать сигнал, поступаюВькодной сигнал первого функцио- В момент окон- нального преобразователя 39 пропорци- , р „ „
онален величине sin.компаратора 48 устанавливается сигнал, вызывающий запуск мультивибратоВыходной сигнал второго функцио- р 49 и 50. Выходной сигнал мульти- нального преобразователя 40 пропорци- вибратора 50 переключает коммутатор онален величине45 на время своего действия, обеспе/J- чивая запоминание выходного сигнала
m 2 интегратора 44 в блоке 46 памяти. В
Выходной сигнал источника 41 сиг- момент установки в ноль сигнала на
7 выходе мультивибратора 50 коммутатор
ала пропорционален величине . 45 возвращается в исходное состояние, Компаратор 42 обеспечивает на сво- после чего выходной сигнал интеграто- ем выходе сигнал в промежутках време- Р устанавливается в ноль. Выход- ни, когда оба сигнала на его входах «° сигнал блока 46 памяти, поступая имеют нулевые значения. первый вход сумматора 47, вызьшает
.Блок 43 измерения длительности им- уменьшение его выходного сигнала сум- нульса тока обеспечивает сигнал на матора, приводя его э соответствие с первом выходе в промежутках времени, фактической длительностью импульса хогда ток якоря прерьшистый (импульс- )гока. В момент наступления очередной ijjjj)паузы в токе якоря динамический вышеД я прерывистого тока якоря наописанный процесс повторяется до тех втором выходе блока .43 обеспечивает- . ™Р ° появляться пауза в
ся сигная, пропорциональный величинетоке якоря.
пВ момент наступления непрерывного
g. При работе с непрерывным токомтока якоря на выходе компаратора 48
якоря на втором выходе блока 43 обес-появляется сигнал и запускает мультипечивается сигнал, пропорциональныйвибратор 49. Спустя промежуток времени
m f
выходной сигнал мультивибратора 49 устанавливается в ноль, вызывая установку в ноль выходных сигналов триггера 53 и блока 46 памяти. Блок 43 измерения длительности импульса тока возвращается в статическое состояние.
Статическое состояние первого регулятора 2 наблюдается в периоды времени, когда задание на скорость и скорост двигателя равны нулю. В указанные периоды врем ени на выходе компаратора 42 наблюдается сигнал, обеспечивающий нулевое значение выходного сигнала пропорционально-интегрального элемента 31, и, следовательно, нулевой уровень сигнала на выходе регулятора 2.
Регулятор 2 может работать в двух
:,
:,
динамических режимах. Первый динамический режим соответствует работе регулятора 2 с непрерывным током якоря, второй - с прерывистым током якоря. Переход регулятора 2 в динамические режимы наступает в момент установки в ноль сигнала на .выходе компаратора 42. Переход в статическое состояние осуществляется спустя небольшой промежуток времени после появления сигнала на выходе компаратора 42,
Первый динамический режим регулятора 2 характеризуется тем, что блок 43 измерения длительности импульса тока находится в статическом режиме и обеспечивает на своем первом выходе сигнал, равный нулю, а на втором выходе - сигнал, пропорциональный велиliчине -. Указанное состояние блока 43
обеспечивает пропорционально интегральный закон управления элементом 31 неизменный сигнал на выходе функционального преобразователя 39 и зависимость выходных сигналов блоков 34 и 35 умножения,, функционального преобразователя 40 и множительно-делитель- ного блока 38 только, от угла ot управп /Jления, т.к. 5 - const. Следовательно,
в первом динамическом режиме на выходе регулятора 2 обеспечивается выходной сигнал, пропорциональный величине
(9) дои 2 и являющийся функцией
только угла управления выпрямителя.
Второй динамический режим регулятора 2 наблюдается в периоды времени /
W
5
15
20 I
когда блок 43 измерения длительности находится в динамическом режиме, обеспечивая на своем первом выходе сигнал постоянного уровня, на втором выходе- сигнал, пропорциональный величине
л
. Динамический режим работы блока 43
обеспечивает пропорциональный закон управления элементом 31 и зависимость выходных сигналов блоков 34 - 36 умножения, функциональных преобразователей 39 и 40 и. множительно-делительно- го блока 38 от длительности импульса тока. Следовательно, во втором динамическом режиме на выходе регулятора 2 обеспечивается сигнал, пропорциональный величине (9) и являющийся .функцией не только угла управления, но и длительности импульса тока.
Предлагаемая самонастраивающаяся система управления (по сравнению с системой-прототипом) ослабляет магнитный поток и функции скорости двигателя, если вход функционального преобразователя блока 12 возбуждения будет подключен к третьему входу блока 12, что позволяет эффективней использовать двигатель по напряжению якоря. Кроме того, включение в состав предлагаемой системы управления дополнительного датчика тока и первого регулятора 2 позволяют самонастраивающейся системе управления работать с требуем1лми динамическими характеристиками во всем диапазоне изменения назрузок при использовании в качестве усилителя 3 мощности управляемого выпрямителя. Отличие работы системы управления в данном случае определяются только работой регулятора 2, которая описана выше.
Отличительные признаки предлагаемой системы управления позволяют использовать в самонастраивающейся системе управляемые полупроводниковые выпрямители многофазного синусоидального напряжения переменного тока в напряжение постоянного тока. Указанные выпрямители (по сравнению с ртутными и злектромашинными преобразователями) имеют меньшие габариты и стоимость, и более высокий коэффициент полезного действия.
Формула изобретения
1. Самонастраивающаяся система управления по авт. св. № 1138787,
отличающая ся тем, что.
13004 с
целью повышения качества управления системы, в нее дополнительно введен -второй датчик тока, выход которого соединен с пять1м входом первого рагу- лятора, а выход датчика скорости соединен с третьим входом блока возбуждения,
2. Система поп,1,отлича- ю щ а я с я тем, что первый регуля- тор содержит множительно-делительный блок, четыре блока умножения, два функциональных преобразователя, пропорционально-интегральный элемент, три сумматора, пропорциональный элемент, блок измерения длительности импульса тока, источник сигнала и компаратор, причем первый вход первого регулятора через пропорциональный элемент соединен с первыми входами ком- паратора и первого блока умножения, подключенного выходом к первому входу первого сумматора, выход которого соединен с первым входом пропоргщональ- но-интегрального элемента, подключен- ного вторым входом к первому выходу блока измерения длительности импульса тока, второй выход которого соединен с первыми входами второго сумматора И второго блока умножения и через пер вый функциональный преобразователь 12
10
5
g
0 30
с первым входом множительно-делитель- ного блока, подключенного выходом к второму входу второго блока умножения и первому входу третьего блока умножения, второй вход которого соединен с выходом пропорционально-интегрального элемента и вторым входом второго сумматора, третий вход которого соединен с выходом источника сигнала и первым входом блока измерения длительности импульса тока, а выход через второй функциональный преобразователь - с вторым, входом множительно- делительного блока, выход второго блока умножения соединен с первым входом четвертого блока умножения, подключенного вторым входом к второму входу компаратора, а выходом - к первому входу третьего сумматора, второй вход которого соединен с выходом третьего блока умножения, а выход соединен с выходом первого регулятора, выход компаратора подключен к третьему входу пропорционально-интегрального элемента, а второй, третий, четвертый и пятый входы первого регулятора подключены соответственно к вторым входам первого сумматора, компа ратора и четвертого блока умножения, первого блока умнол ения, блока измерения длительности импульса тока. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| ПРЕЦИЗИОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2123756C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
| Электропривод постоянного тока | 1981 |
|
SU959248A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2020717C1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
Изобретение относится к автоматике, является усовершенствованием изобретения по авт.св. № 1138787 и может быть использовано для управления промышленными электроприводами. Цель изобретения - повьппение качества управления при использовании в качестве усилителя мощности управляемого выпрямителя. Для достижения цели изобретения в самонастраивающуюся систему управления дополнительно введен второй датчик 28 тока, выход которого соединен с пятым входом первого регулятора 2, а выход датчика 6 скорости соединен с третьим входом блока 12 возбуждения. 1 з.п. ф-лы, 3 ил. 14)
4f
Редактор А.Рёвин
Составитель В.Башкиров ; Техред Н.Глущенко Корректор Е.Рошко
Заказ 1147/45 Тираж 864 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., Д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
