Известны крановые захваты для грузов, выпо.шенныс в виде П-образной рамы, один стержень которой С абжен поворотным кулаком, прижимающим стенку поднимаемого изделия ко вгорому стержню.
Недостатком таких захватов является то, что они не обеспечивают возможности -взятия изделия за высгупаюпгую кромку и возможности поворачивания его вокруг горизонтальной оси.
В описываемом устройстве этот недостаток устранен тем, что Побразная рама укреплена на втулке, свободно надетой на горизонтальную трубу, консольно укрепленную на Г-образной крановой подвеске и заключающую внутри аксиально подвижный валик, управляюпшй кулаком.
Для перемещепия горизонтального валика применен второй горизонтальный валик, аксиально перемещаемый вручную, смонтпровапный в вертикальной части Г-образной рамы и кинематически связанный с первым валиком посредством системы из двзх фасонных угловых рычагов, сопряженных между собой при помопги вертикальной тяги.
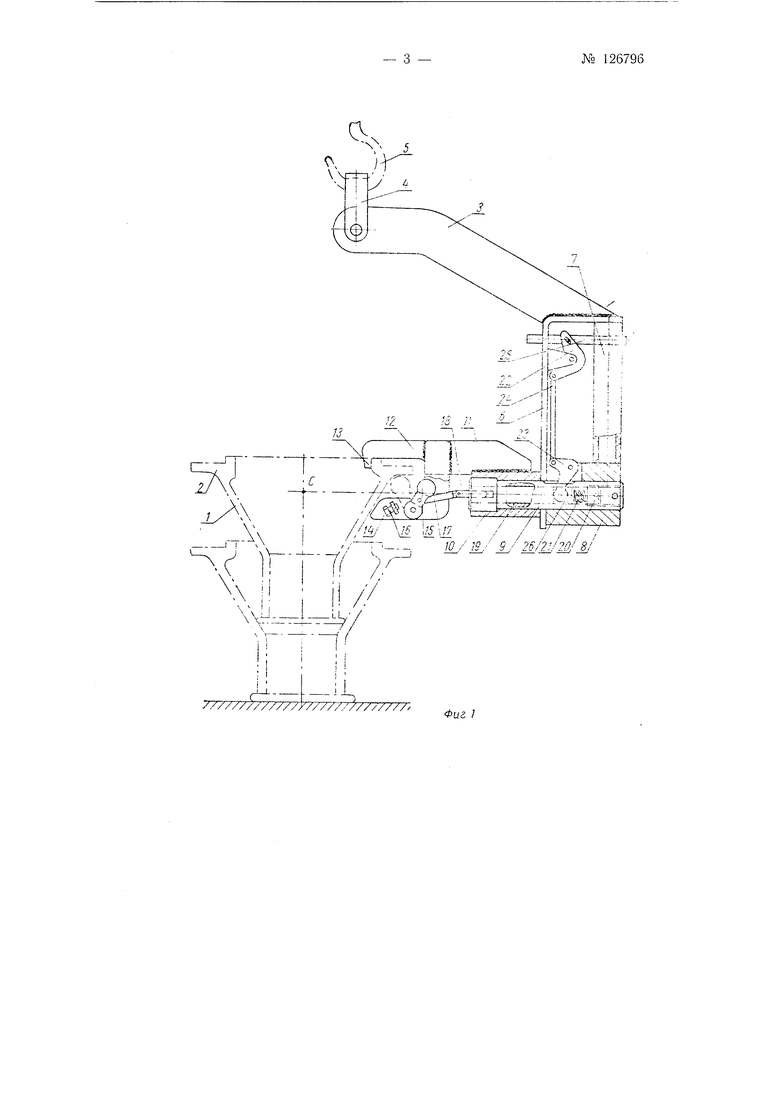
На фиг. 1 изображено устройство в момент захвата им груза; на фиг. 2 изображен захват при трапспортировке груза; на фиг. 3-вид по стрелке А на фи|. 2.
Захват предназначен для транспортировки щтучных грузов, предстазляЕощих собой фасонные изделия / с выступающей 2, п состоит из остова, Н-образной рамы и системы рычагов и тяг, управ.ляющих зажимным кулаком.
Остов захвата выполнен в виде Г-образпой крановой подвески, верхний конеп 5 которой посредством петли 4 подвеп ивается к крюку 5 подъемного крана. Стойка подвески состоит из Г-образиого листа 6 и трубы 7, п 1иваренных к основанию fi, в расточке которого непо№ 126796- 2 -
движно посажена труба 9, а на зыстунающей части трубы свободно посажена втулка 10, удерживаемая от осевого перемещения буртом заточки трубы Р. К втулке 10 прикреплен кронштей« И П-образной рамы, верхний стержень 12 которой выполнен сдвоенным и снабжен упорами 13, а нижний стержень 14 имеет расточку для оси зажимного кулака 15 и регулируемый упор 16. Кулак 15 промежуточной тягой 17 связан с вилкой 18, хвостовик которой свободно посажен в гнездо валика 19, аксиально подвижного в расточке трубы 9, причем продольное перемещение вилки 18 относительно валика 19 предотвращается посредством предусмотренного на валике штифта, взаимодействующего с кольцевой проточкой хвостовика вилки 18. В расточке трубы 9 между тсрцом г алика 19 и резьбовой пробкой 20 размещена также 21. Система управления зажимным кулаком 15 состоит из двух фасонных угловых рычагов 22 и 23, смонтированных на кронштейнах стойки подвески, соединяющей их вертикальной тяги 24 и горизонтального валика 25, подвижного в расточках Г-образного листа б и трубы 7 и связанного с угловым рычагом 22. Для свободного конца рычага 23 в хвостовой части валика 19 предусмотрено гнездо 26.
Геометрические размеры элементов захвата подобраны таким образом, что ось вращения втулки 10 проходит через центр тяжести С изделия.
Для захвата изделия рабочий перемещает валик 25 в положение, показанное на фиг. 1. Валик 25 разворачивает рычаг 22 и связанный с ним рычаг 23, С13ободный конец которого, преодолевая сопротивление пружины 21, отжимает валик 19. При этом кулак 15 разворачивается в положение, показанное па фиг. 1 сплошной линией, и не препятствует заводке упоров 13 П-образной рамы за верхний бурт изделия /. После этого валик 25 освобождается, под действием пружины 21 валик 19 перемещается вперед, а кулак 15 разворачивается в рабочее положение, изображенное иа фиг. 1 пунктирными линиями. При этом он поджимается к кромке 2 изделия /, фиксируя последнее относительно П-образной рамы.
Так как центр тяжести С изделия 1 находится на оси вращения зтулки 10, для разворота изделия / в горизойтальпой плоскости (фиг. 2) следует только преодолеть силу трения между втулкой 10 и трзбой 9, которая будет в то же в)емя препятствовать самопроизвольному )азворот изделия /.
Предмет изобретения
1.Крановый захват для штучных грузов, выполненный в виде П-образной рамы, один стержень которой снабжен поворотным кулаком, ирижимаюн им стенку поднимаемого изделия ко второму стержню, отл и ч а ю И и и ся гем, что для возможности взятия изделия за выступающую кромку и возможности поворачивания изделия вокруг горизонтальной оси П-образная рама укреплепа на втулке, свободно надетой на горизонтальную трубу, консольно укрепленную иа Гобразной крановой подвеске и заключающую внутри аксиально подвижный валик, управляющий кулаком.
2.Форма выполнения захвата по п. 1, о т л и ч а ю и;а яс я тем, что для перемещения горизонтального валика применен второй горизонтальный валик, аксиально иеремещаемый вручную, смонтированиый в вертикальной части Г-образной рамы и кинематически связанный с первым валиком посредством системы из двух фасонных угловых рычагов, сопряженных лгежду собой при помощи вертикальной тяги.
.
/МЩ-У
, / 1C ГС , f;/ / -V / 7

1 I
j±
г,777;;л
, /
