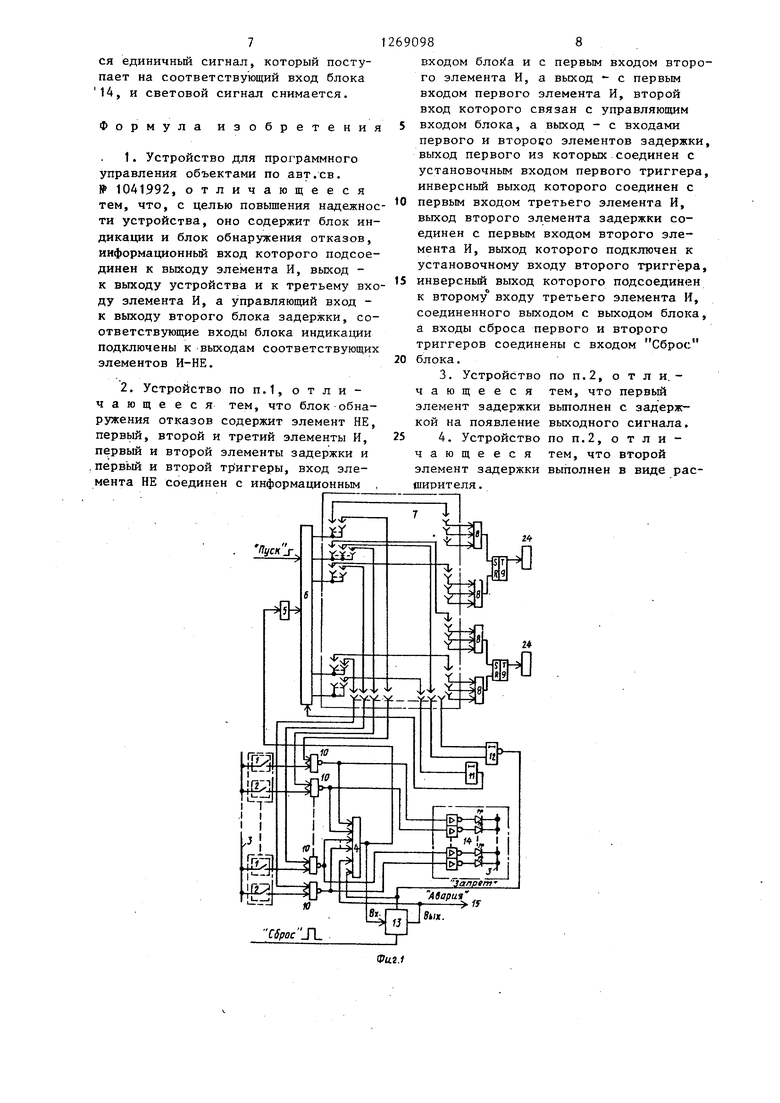
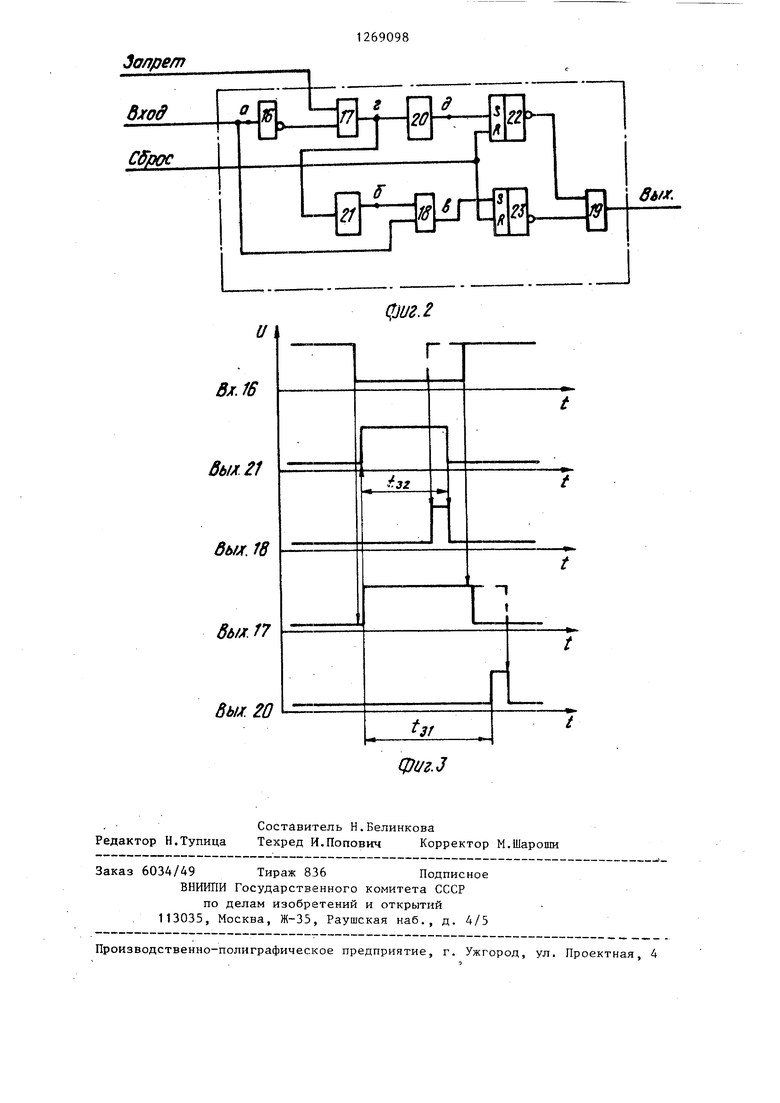
Изобретение относится к области автоматики, и может быть использовано в системах программного управления двухпозиционными объектами и является усовершенствованием устройства по авт.ев, № 1041992. Цель изобретения - повышение надежности устройства и з еньшение потерь времени на обнаружение и поиск неисправностей. На фиг.1 изображена схема устройства; на фиг.2 - функциональная схема блока обнаружения отказов; на фиг.З - временная диаграмма, иллюстрирующая работу блока обнаружения отказов. Устройство содержит датчики 1 конечного положения и датчики 2 началь ного положения (например, контактного типа) объектов, входы которых под ключены -к шине 3 с напряжением нулевого сигнала, последовательно соединенные элемент И 4, формирователь 5 одиночных импульсов, блок 6 распределения импульсов, блок 7 набора программы, группу элементов ИЛИ 8 и группу триггеров 9, элементы И-НЕ 10, первые входы которьгх подключены к выходам соответствующих датчиков 1 или 2, вторые входы - к соответствующим выходам блока 7 набора программы, а выходы - к первым входам элемента И 4, первый 11 .и второй 12 блоки задержки, входы которых подключены к соответствующим выходам блока 7 набора программы,, причём выход первого блока 11 задержки подключен к входу сброса в нуль блока б распределения импульсов, выход второго блока 12 задержки подсоединен к второму входу элемента И 4, блок 13 обнаружения отказов и блок 14 индикации. Устройство также содержит выход 15. Блок 13 (фиг.2) содержит элемент НЕ 16, первый 17,. второй 18 и третий 19 элементы И, первый 20 и второй 2 элементы задержки и первьй 22 и вто рой 23 триггеры, Устройство работает следуюпщм об;разом. До начала работы производят набор программы, определяющий последовате льность включений-отключений объект 24 перемычками, соединяющими приемны гнезда блока 6 с соответствуюпщми входами: элементов И-НЕ 10, элементов ИЛИ 8 и блоков 11 и 12 задержки Триггеры 9,22 и 23 предварительно установлены в нулевое (исходное) состояние (цепи сброса триггеров 9 не показаны) , соответственно объекта 24 отключены и находятся в начальном (исходном) положении (например, при использовании пневмораспределителей одностороннего действия с самовозвратом, часто применяемые в промышленных манипуляторах) контакты датчиков 2начального положения замкнуты, а контакты датчиков 1 конечного положения разомкнуты. В исходном состоянии команда Пуск (сигнал управления) не поступает на вход стробирования выходных сигналов блока 6 распределения импульсов, представляющего собой последовательно соединенные счетчик и дешифратор, в связи с чем на всех его выходах присутствует нулевой сигнал. Следовательно, нулевой сигнал присутствует и на вторых входах соответствующих элементов И-НЕ 10. На -первых входах элементов И-НЕ 10, подсоединенных к выходам соответствующих датчиков 2, присутствует нулевой сигнал, поступающий через замкнутые контакты датчиков 2 с шины 3с напражением нулевого сигнала. На входах элементов И-НЕ 10, подсоединенных к выходам соответствующих датчиков 1, присутствует единичньй сигнал (например, при применении логических элементов И-НЕ, на неза цействованных входах которых присутствует единичный уровень сигнала, для надежности все незадействованные входы логических элементов подключают к шине с напряжением единичного сигнала через резисторы (не показано), так как контакты датчиков .1 разомкнуты и входы элементов И-НЕ 10 оказываются неподсоединенными к шине 3 с напряжением нулевого сигнала Следовательно, на всех выходах элементов И-НЕ 10 присутствует единичньй сигнал и через элемент И 4 он поступает на вход формирователя 5, но одиночный импульс не формируется, так как формирователь 5 формирует одиночный импульс при положительном изменении сигнала на его входе, т.е. при изменении входного сигнала с нулевого на единичньш. Этот же единичный сигнал с выхода элемента И 4 поступает на вход блока 13,.на вход
31
элемента И 18 и на вход элемента НЕ 16.
Проинвертированный (нулевой) сигнал с выхода элемента НЕ 16 поступает на вход элемента И 17 и далее через элемент 20 на вход триггера 22, который на нулевой сигнал не реагирует и находится в нулевом состоянии Нулевой сигнал с выхода элемента И 17 через элемент 21 и элемент И 18 поступает на вход триггера 23, которьй на нулевой сигнал не реагирует и находится в нулевом состоянии. Следовательно, на инверсных выходах пер вого 22 и второго 23 триггеров присутствуют единичные сигналы. Единичные сигналы присутствуют на входах элемента И 19, единичный сигнал с выхода которого поступает на выход устройства и на вход элемента И 4, разрешая работу устройства.
Единичный сигнал с соответствующих выходов элементов И-НЕ 10 поступает н,а соответствующие входы блока 14 (фиг.1), но световая сигнализация отсутствует, так как блок 14 формирует световой сигнал при появлении нулевого сигнала на его входе, т.е. только в процессе работы предлагаемого устройства.
По команде Пуск, поступившей на вход стробирования выходных сигна лов блока 6, на его первом выходе появляется сигнал управления (единичный сигнал), который поступает в соответствующие приемные гнезда блока 7 набора программы.
После прихода сигнала управления в приемное гнездо, подсоединенные к выходу элемента ИЛИ 8, подключенного к прямому входу триггера 9, срабатывает соответствующий триггер 9 и включается соответствующий объект 24 управления, который начинает перемещаться из начального положения в конечное. Одновременно этот же сигнал по.ступает на вход соответствующего элемента И-НЕ 10. На другом входе элемента И-НЕ 10, подключенного к выходу соответствующего датчика 1, тоже присутствует единичный сигнал.
Наличие на обоих входах элемента И-НЕ 10 единичного сигнала приводит к появлению на его вькоде нулевого сигнала, которьй поступает на соответствующий вход блока 14 и через элемент И 4 поступает на вход формирователя 5 и «а вход блока 13. При дос690984
тижении перемещающимся объктом 24 заданного конечного положения срабатывает соответствующий датчик 1 и замыкает свой контакт. С шины 3 нуле5 вой сигнал через замкнутый контакт поступает на вход этого же элемента И-НЕ 10. На выходе появляется единичный сигнал, поступающий на соответствующий вход блока 14, и через 10 элемент И 4 (при отсутствии сигнала Запрет с блока 12 на его втором входе или сигнала Авария с блока 13 на его третьем входе) он поступает на вход блока 13 и на вход формироваf5 телЛ 5, который формирует одиночный импульс, поступающий на переключающий вход блока 6.
При этом сигнал управления появляется на его следующем (втором) выхо0 де, а на первом его выходе сигнал
управления снимается, т.е. устанав ливается нулевой сигнал.
Сигнал управления с выхода блока 6 поступает в приемные гнезда блока 5 7, и работа устройства повторяется. Объект 24 находится во включенном состоянии до появления сигнала управления в гнезде, подключенном через элемент ИЛИ 8 к нулевому входу триг0 гера 9, который возвращается в нулевое состояние, и, соответственно, отключается объект 24 управления. Объект 24 начинает перемещаться с конечного положения в начальное. Рабо та устройства в этом случае аналогич на изложенной.
В процессе вьшолнения команды управления объектом 24 управления нулевой сигнал с выхода элемента И 4 поступает на вход блока 13. Нулевой сигнаш с входа блока 13 поступает на вход элемента 16 и на второй вход второго элемента И 18 (фиг.2). Инвертированный (единичный) сигнал с выхода элемента НЕ 16 поступает на вход элемента И 17 и при отсутствии .сигнала Запрет на его другом входе единичный сигнал поступает на вход элемента 20, выполненного на задержку
выходного сигнала. Этот единичный сигнал с выхода элемента И 17 поступает на вход элемента 21, выполненного в виде временной импульсной задержки, что приводит к формированию на
его выходе импульса с длительностью , который поступает на вход элемента И 18. Если единичный сигнал на входе элемента 20 находится во времени, превышающем время задержки (пунктиром показан сигнал, сформированньй в случае возникновения отказа устройства,,например, останова объек та 24 в промежуточном положении фиг.З), то на выходе его через время i, появляется сигнал который поступает на вход триггера 22. Триггер 22 перебрасывается, и нулевой сигнал (сигнал Авария) -через элемент И 19 поступает на вход элемента И 4, запрещая дальнейшую работу устройства, и на выход 15 устройства для последу ющего формирования аварийных сигналов.. Время задержки 1:-,: элемента 20 устанавливается таким., чтобы обеспечить максимальное время работы объек тов 24 управления по данной программ с заданньгмй скоростями. После устранения неисправности триггер 22 устанавливается в исходно состояние сигналом Сброс, сигнал Авария снимается с входа элемента И 4, разрешая дальнейшую работу устройства . Если единичный сигнал на входе эл мента 20 находится во времени меньше tj, и больше i-i,т.е. устройство функц онирует в заданном режиме, то после выполнения команды управления обтэектом 24 (за время меньше tit ) на выходе элемента 20 появляется нулевой сигнал, которым элемент 20 устанавливается в исходное состояние, и он готов к последующей работе - контрелю отработки следующей команды. Если объект 24 управления достигает заданного положения раньше уста новленного времени (при повышенной скорости вьш:е заданной) , то единичньм сигнал на выходе элемента И 4 и соответственно, на входе элемента И 18 появляется в момент времени, меньший i.j (пунктиром показан сигнал в случае возникновения отказа устройства, например, перемещения объекта 24 с повьш1енной скоростью, фиг.З). Следовательно, на обоих входах элемента И 18 находится единичный сигнал, который поступает на вхо триггера 23. Триггер 23 перебрасывается, и нулевой сигнал (сигнал Авария) через элемент И 19 поступает на вход элемента И 4, запрещая дальнейшую работу устройства, и на выход 15 устройства для последующего формирования аварийных сигналов. Время задержки i элемента 21 устанавливается таким, чтобы обеспечить минимальное время работы объектов 24 по данной программе с заданными скоростями. После устранения неисправности триггер 23 устанавливается в исходное состояние сигналом Сброс, сигнал Авария снимается с входа элемента И 4, разрешая дальнейшего работу устройства. Работа устройства аналогична и в . случае одновременного управления несколькими объектами 24, так как единичный сигнал на входе формирователя 5 и входе блока 13 появляется только при выполнении объектами 24 соответ-( ствующих командуправления, т.е. при достижении объектами 24 заданного положения и срабатывании соответствующих датчиков 1 или 2 и, соответственно, при появлении единичного сигнала на всех выходах соответствующих элементов И-НЕ 10, т.е. на всех входах элемента И 4 (при отсутствии сигнала Запрет с блока 12 на его втором входе или сигнала Авария с блока 13 на его третьем входе). Сигнал управления, поступивший в любое приемное гнездо, подсоединенное к входу блока 12, вызывает формирование на его выходе сигнала Запрет, поступающего на вход элемента И 4 и на вход блока 13, запрещая работу устройства и блока 13 для обеспечения отработки программных временных задержек, который снимается по истечении времени задержки блока 12. Блок 11 обеспечивает вьщержку времени между концом предьщущего и началом следующего хщкла. Сигнал управления, поступивший в приемное гнездо, подсоединенное к входу блока 11, вызывает формирование на его выходе сигнала, который поступает на вход установки в нуль блока 6-. По окончании времени задержки сигнал с входа блока 6 снимается, а цикл повторяется . Блок 14 индикации обеспечивает индикацию состояния устройства во время его работы. Нулевой сигнал, поступаюш51Й с соответствующего элемента И-НЕ 10, поступает на соответствующий вход блока 14, который формирует световой сигнал, сигнализируя о работе объекта 24. . По окончании работы объекта 24 на выходе элемента И-НЕ 10 формирует7
ся единичньй сигнал, который поступает на соответствующий вход блока 14, и световой сигнал снимается.
Формула изобретения
1.Устройство для программного управления объектами по авт.св.
№ 1041992, отличающееся тем, что, с целью повьшения надежности устройства, оно содержит блок индикации и блок обнаружения отказов, информационный вход которого подсоединен к выходу элемента И, выход к выходу устройства и к третьему входу злемента И, а управляющий вход к выходу второго блока задержки, соответствующие входы блока индикации подключены к Выходам соответствующих злементов И-НЕ.
2.Устройство ПОП.1, отличающееся тем, что блок обнаружения отказов содержит злемент НЕ, первьй, второй и третий элементы И, первый и второй элементы задержки и
,первьй и второй триггеры, вход элемента НЕ соединен с информационным ,
690988
входом и с первым входом второго элемента И, а выход - с первым входом первого элемента И, второй вход которого связан с управляющим
5 входом блока, а выход - с входами первого и второсо злементов задержки, выход первого из которых соединен с установочным входом первого триггера, инверсный выход которого соединен с
10 первым входом третьего элемента И, выход второго элемента задержки соединен с первым входом второго злемента И, выход которого подключен к установочному входу второго триггера,
15 инверсный выход которого подсоединен к второму входу третьего элемента И, соединенного выходом с вьпсодом блока, а входы сброса первого и второго триггеров соединены с входом Сброс
20 блока.
3. Устройство по п.2, о т л и,чающееся тем, что первый элемент задержки выполнен с задержкой на появление выходного сигнала.
25 4. Устройство по п.2, отличающееся тем, что второй элемент задержки выполнен в виде расширителя .
2
Запрет
dJfod
Cffjooc
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для многоточечной сигнализации аварийных состояний | 1988 |
|
SU1501116A1 |
| Устройство для программного управления объектами | 1982 |
|
SU1041992A1 |
| Устройство для контроля состояния объектов | 1986 |
|
SU1368902A1 |
| Устройство для многоточечной сигнализации аварийных состояний | 1984 |
|
SU1205163A1 |
| Многоканальное устройство для управления объектом | 1979 |
|
SU911465A2 |
| Устройство для функционального диагностирования и защиты тиристорного преобразователя | 1988 |
|
SU1690072A1 |
| Устройство для тестового диагностирования | 1982 |
|
SU1045230A1 |
| Устройство для программного управления | 1987 |
|
SU1596307A1 |
| Устройство для автоматического контроля и индикации | 1991 |
|
SU1807452A1 |
| Устройство для построения диагностического теста и диагностирования комбинационных схем | 1983 |
|
SU1160420A2 |
Изобретение относится к области автоматики и может быть использовано в системах программного управления двухпозиционными объектами. Цель изобретения - повышения надежности уст-. ройства достигается введением блока индикации и блока обнаружения отказов, вьтолненного определенным образом. В схеме контролируются отказы устройства в рабочем режиме с формированием сигнала Авария и его остановом для исключения аварийных ситуаций, осуществляется сигнализация состояния устройства, что позволяет проводить оперативный контрольвьшолнения программы и получать информацию об отказах в момент ух § возникновения . 3 з. п . ф-лы, 3 шт. С/Э
| Устройство для программного управления объектами | 1982 |
|
SU1041992A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Рейзин В.Л | |||
| и др | |||
| Элементы управления серии Логика И | |||
| - М.: Энергоатомиздат, 1984, с.140, 144, рис.3.33 и 3,38. | |||
