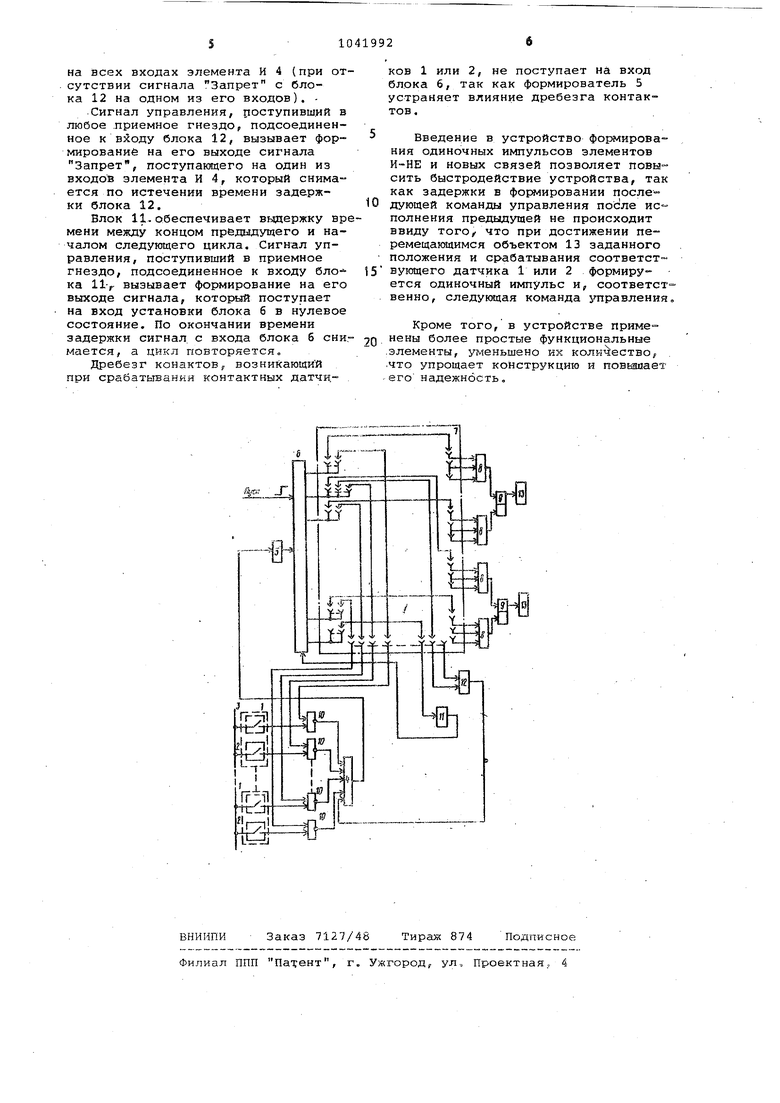
со со to Изобретение относится к автомат ке и может быть использовано- в сис темах программного управления двух позиционными объектами. Известно программное устройство для управления циклическими процессами, содержащее задающий генератор импульсов, кольцевые сдвигаю щие регистры и элемент И, выход задающего генератора импульсов под ключен к объединенным входам кольцевых сдви;аемых регистров, выходы которых соединены через элемент И с выходной шиной устройства 1 J. Недостатками такого устройства являются сложность ввиду значитель ного .объема, сдвигаемых регистров, число которых прямо пропорционально количеству программируемых команд и числу шагов программы, отсутствие контроля выполнения обрабатываемых команд, что снижает надежность программного устройства и малое быстродействие.. Наиболее близким по техническому решению к предлагаемому является устройство для программного . управления, содержащее, датчики положения объектов, -последовательно соединеннее генератор иотульсов, элемент И, блок распределения импульсов, блок набора программы, элементы ИЛИ и первыетриггеры, блоки задержки, вторые, триггеры, единичные входы- которых подключены к соответствующим датчикам положения, дополнительный элемент ИЛИ, вы ход которого соединен с одним из входов элемента И, а входы - с выходом первого блока задержки и нулевыми выходами вторых триггеров, -нулевые входы которых и входы блоков задержки подключены к выходам блок-а набора программы, а выход второго блока задержки - к входу сброса в нуль блока распределения импульсов 2. . Недостатками данного устройства являются сложность и,как следствие , невысокая надежность ввиду значительного количества вторых три геров и триггеров контактных датчик положения, количество которых прямо пропорционально количеству програм мируемых команд и числу датчиков положения соответственно, необходимость организации узлов установки указанных триггеров в исходное состояние при каждом включении устрой ства, что приводи.т к росту числа св зей и дополнительному его усложнению, наличие генератора импульсов имеющего достаточно сложные схемные решения, а также невысокое быстродействие в связи с тем, что конец сигнала ЗАПРЕТ (исполнение команды объектом, управления) приходит на элемент И в любой момент времени по отношению к периоду следования тактовых импульсов и, следовательно, последующая- команда управления формируется с задержкой относительно момента формирования конца сигнала ЗАПРЕТ при появлении его в промежутке между задним и передним фронтами тактового импульса. При длительной циклической работе устройства такие задержки накапливаются и . приводят к существенным потерям рабочего времени и снижению производительности работы промышленных объектов (например, промышленных роботов), в которых оно использовано. Цель изобретения - упрощение устройства и повышение его быстродействия, Поставленная цель достигается тем, что устройство для программного уп- , равления. объектами, содержащее датчики положения объектов, элемент И, последовательно соединенные блок распределения импульсов, блок набора программы, группу элементов ИЛИ и группу триггеров, первый и второй блоки задержки, входы которых подключены к соответствующим выходам блока набора программы, причем выход первого блока задержки подключен к входу сброса в нуль блока распределения импульсов, содержит формирователь одиночных импульсов и эл.ементы И-НЕ. пеовир ихппы которых подключены к выходам соответствующих датчиков положения объектов, вторые входы - к соответствующим выходам блока набора пpoгpa лмы, а выходы - к первым входам элемента И, второй вход которого соединен с вы ходом второго блока задержки, а выход. - с входом -формирователя одиночных импульсов, подключенного выхо.дом к переключающему; входу блока распределения импульсов. На чертеже изображена функцио нальная схема:устройства. Устройство содержит датчики 1 (конечного) положения и датчики 2 (начального) положения (например, контактного типа) объектов, входы к.оторы§ подключены к шине 3 с напряжением нулевого сигнала, последовательно соединенные элемент И 4 . формирователь 5 одиночных импульсов, блок 6 распределения импульсов; блок 7 набора программы, группу элементов ИЛИ 8 и группу триггеров 9, элементы И-НЕ 10, первые входы которых подключены к выходам соответствующих датчиков 1 или 2, вторые входы - к выходам блока 7 набора программы, а выходы - к соотЕетст вующим входакГ элемента И 4, первый 11 и второй 12 блоки задержки, вхоы которых подсоединены к -выходам блока 7 Набора программы, ьыход блока 11 подключен к входу сброса в нуль блока 6, выход блока 12 задержки соединен с одним из входов элемента И 4, и объекты 13 управления. Устройство работает следующим образом. До начала работы производят на-: бор программы,, определяющей последовательность включений-отключений объектрв 13, перемьпками, соединяющими приемные гнезда блока 7 с соответствующими входами элементов И-НЕ 10, причем триггеры 9 предвари тельно установлены в нулевое состоян объекты 13 отключены и находятся в начальном (исходном )положении (например , при использовании пневмораспределителей одностороннего действия с самовоэвратом) , контакты датчиков 2 -(начального) положения замкнуты, а .контакты 1 (конечного) положения разомкнуты. В исходном СОСТОЯНИИкоманда Пуск (сигнал управления) не . поступает на вход стробйрования выходных сигналов блока 6 .(обычнопре ставляющий собой последовательно соединенные счетчик и дешифратор), связи с чем на всех его выходах при сутствует нулевой сигнал. Следовательно, нулевой сигнал присутствует и на других входах:соответствующих элементов И-НЕ 10.; На входах элементов И-НЕ 10, подсоединенных к выходам соответствующих датчиков 2, присутствует нулевой сигнал, прступаимцйй через замкнутые контакты датчиков 2 с шины 3 с напряжением нулевого сигнала., На входах элементов И-НЕ10, подсоединенных к выходам соответствующих датчиков. 1, присутствует еди ничный сигнал (например, при примеиении логических элементов И-НЕ ТТЛ-типа, серий 134, 155, на неза-, действованн&х входах которых при-.; сутствует единичный уровень сигнала так ка.к контакты датчиков -1 разомкнуть и входы этих элементов И-НЕ 10 оказываются не подсоединенн ми к отне 3 с напряжением нулевого. сигнала. Следовательно, на всех выходах элементов И-НЕ 10 присутствует единичный сигнал, и через элемент И 4 он поступает на вход форми рователя 5, но одиночный импульс не формируется, так как формирователь формирует одиночный импульс при положительном изменении сигнала на .ег входе, т.е. при изменении входного сигнала с нулевого на единичный. По команде Пуск, поступившей на вход стробйрования выходных сигналов блока 6, на его первом выходе появляется сигнал управления (единичный сигнал), который.-поступает в соответствующие приемные гнезда слегка 7. После прихода сигнала управления в приемное гнездо, подсоединенное к входу элемента ИЛИ 8, подключенного к единичному входу триггера 9, срабатывает соответствующий триггер 9 и включается соответствующий объект 13, который начинаетперемещаться из начального положения в конечное, одновременно этот же сигнал поступает на вход .соответствующего элемента. И-НЕ W. На другом входе этого элемента И-НЕ 10, подключенного -к выходу соответствующего датчика 1, тсуке присутствует единичный сигнал. Наличие на обоих входах элемента И-НЕ 10 единичного сигнала приводит к появлению на его выходе иу.певого сигнала, который через элемент И 4 поступает на вход формирователя 5. При достижении перемещакяцимся объектом 13 заданного конечного положения срабатывает соответствующий, датчик 1 и замыкает свой контакт. С шины 3 нулевой сигнал через замкнутый контакт поступает на вход элемента И-НЕ 10. На выходе его появляется единичный сигнал, и через элемент И 4 (при отсутствии сигнала Запрет с. блока.12 на одном из его входов) он поступает на вход формирователя 5, который формирует одиночный импульс, поступающий на переключающий вход блока 6. При этом сигнал управления появляется на его следующем (втором) выходе , а на первом его выходе сигнал управления снимается, т.е. устанавливается нулевой сигнал. Сигнал управления со второго выхода блока 6 поступаетв приемные : гнезда блока 7, и работа у ;тройства повторяется. , Объект 13 находится во- включенном состоянии до появления сигнала управления в гнезде, подключенном через элемент ИЛИ. 8 к нулевое му входу данного триггера 9, который возвращается в нулевое состояние, и, соотве.тственно, отключается объект 13, который начинает перемещаться с конечного положения в начальное. Работа устройства в этомсяучае аналогична вышеуказанной. Работа устройства аналогична и в случае одновременного управления несколькими объектами 13, так , как единичный сигнал на входе формирователя 5 появляется только при выполнении объектами 13соответствующих команд управления, т.е. при достижении объектами 13 заданного положения и срабатывании соответствующих датчиков 1 или 2 и , соответственно, при появлении единичного сигнала на всех выходах соот ветствующих элементов И-НЕ 10, т.е.
на всех входах элемента И 4 (при отсутствии сигнала Запрет с блока 12 на одном из его входов). Сигнал управления, поступивший в любое .приемное гнездо, подсоединенное к вйоду блока 12, вызывает формирование на его выходе сигнала Запрет, поступающего на один из входов элемента И 4, который снимается по истечении времени задержки блока 12.
Блок 11.обеспечивает выдержку времени между концом предыдущего и началом следующего цикла. Сигнал управления, поступивший в приемное гнездо, подсоединенное к входу блока 11 вызывает формирование на его выходе сигнала, который поступает на вход установки блока б в нулевое состояние. По окончании времени задержки сигнал с входа блока б снимается, а цикл повторяется.
Дребезг конактов, возникающий при срабатывании контактных датчк- ,
ков 1 или 2, не поступает на вход блока 6, так как формирователь 5 устраняет влияние дребезга контактов.
Введение в устройство формирования одиночных импульсов элементов И-НЕ и новых связей позволяет повысить быстродействие устройства, так как задержки в формировании последующей команды управления после ис-полнения предыдущей не происходит ввиду того/ что при достижении перемещающимся объектом 13 заданного положения и срабатывания соответст™ вующего датчика 1 или 2 формируется одиночный импульс и, соответст венно, следующая команда 1травления
Кроме того, в устройстве приме2Q нены более простые функциональные
.элементы, уменьшено их коли ество, .что упрощает конструкцию и повкшзает -его надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления объектами | 1984 |
|
SU1269098A2 |
| Устройство для программного управления объектами | 1985 |
|
SU1287107A1 |
| Устройство для программного управления объектами | 1989 |
|
SU1777120A1 |
| Устройство для циклового программного управления | 1982 |
|
SU1084738A1 |
| Устройство для циклового программного управления | 1979 |
|
SU773573A1 |
| Устройство для циклового программного управления | 1986 |
|
SU1312527A1 |
| Устройство для программного управления | 1975 |
|
SU537328A1 |
| Устройство для программного управления | 1987 |
|
SU1596307A1 |
| Программно-временное устройство | 1978 |
|
SU805257A1 |
| Устройство для программного управления | 1984 |
|
SU1167585A1 |
УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ, содержащее датчики положения объектов, элемент И, последовательно соединение блок распределения импульсов, блок набора программы, группу эле- ментов ИЛИ и группу триггеров, первый и второй блоки задержки, входы КОТО1ИЛХ подключены к соответствующим выходам блока наборапрограммы, причем выход первого блока за- держки подключен к входу сброса в нуль блока распределения импульсов, от л и.чающееся тем, что, с целью упрсяцения и повышения быстродействия- устройства, оно содержит формирователь одиночных импульсов и элементы И-НЕ, первые входы которых подключены к выходам соответствующих датчиков, положения .объектов, вторые входы - к соответЬтвукяцим выходам блока набора программы, а выходы - тс первым входам элемента И, второй вход которого соединен с выходом второго блока задержки, а выход - с входом форми- j рователя одиночных импульсов, под(Л ключенного выходом к переключающему входу блока распределения импульсов.
%:1.Х
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для программного управления | 1975 |
|
SU537328A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
