мотка 7, а на двух крайних стержнях другого сердечника размещены две секции 8 и 9 вторичной обмотки, включенные последовательно-встречно. В исходном положении якоря площади перекрытия крайних стержней обоих сердечников пластинами якоря равны и, вследствие этого равны и ЭДС, наведенные в секциях вторичной обмотки.
Выходной сигнал датчика равен нулю вследствие минимизации магнитных потоков рассеяния, связывающих секции первичной и Е1ТОРИЧНОЙ обомоток. При угловом перемещении якоря площади перекрытия крайних стержней обоих сердечников ферромагнитными пластинами якоря изменяются линейно в функции угла лрворота якбря. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциально-трансформаторный датчик перемещения | 1985 |
|
SU1332142A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2019787C1 |
| Датчик линейных перемещений | 1989 |
|
SU1772598A1 |
| ИНДУКТИВНО-ТРАНСФОРМАТОРНЫЙ ДАТЧИК | 1997 |
|
RU2138011C1 |
| Линейный электродвигатель | 1977 |
|
SU693514A1 |
| Датчик угловых перемещений | 1989 |
|
SU1768948A1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| Трансформаторный датчик угловых перемещений | 1981 |
|
SU974110A1 |
| Способ преобразования перемещения в фазу и дифференциально-трансформаторный датчик для его осуществления | 1985 |
|
SU1252652A1 |
| Трансформаторный датчик с подвижным яко-PEM | 1979 |
|
SU828200A1 |
Изобретение относится к измерительной технике и позволяет повысить точность измерения угловых перемещений путем уменьшения влияния потоков рассеяния в дифференциально-трансформаторном датчике перемещений. Датчик содержит два Ш-образных симметрично расположенных и обращенных один к другому стержнями ферромагнитных сердечника 1 и 2, разделенных воздушным зазором. В зазоре между сердечниками размещен якорь 3, который установлен с возможностью вращения в плоскости воздушного зазора. Якорь выполнен в виде нескольких ферромагнитных пластин, механически связанных между собой. Две крайние пластины 4 и 6 якоря смещены относительно его продольной оси. На среднем стержне одного из сердечников размещена первичная об(Л о сд 4i 
1
Изобретение относится к измерительной технике и может быть использовано для дистанционного контроля перемещений в системах автоматического управления при действии сильных электромагнитных помех.
Целью изобретения является повышение точности дифференциально-трансформаторного датчика при измерении угловых перемещений путем уменьиения влияния потоков рассеяния и внешних электромагнитных помех.
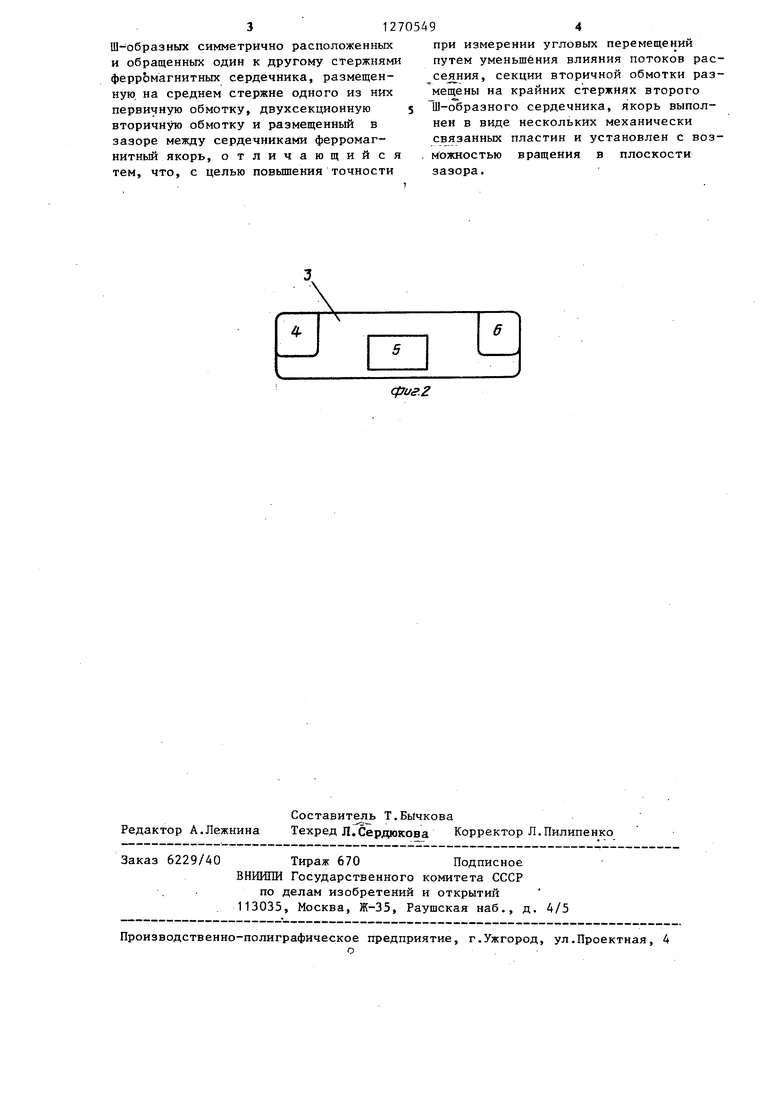
На фиг.1 представлена схематично конструкция дифференциально-трансформаторного датчика; на фиг.2 якорь датчика, вид сверху.
Дифференциально-трансформаторный датчик угловых перемещений содержит два симметрично расположенных В --образных ферромагнитных сердечника 1 и 2., разделенных воздушным зазором и обращенных один к другому своими стержнями. В зазоре между сердечниками 1 и 2 размещен якорь 3, кготорьй установлен с возможностью вращений в плоскости воздушного зазора относительно продольной оси 0-0 датчика. Якорь 3 датчика выполнен EI .виде .нескольких ферромагнитных пластин 4-6, механически связанных между собой. Пластины 4 и 6 смещены относительно продольной оси якоря и вследствие этого частично заполняют воздушные зазоры между карйними стержнями сердечников 1 и 2 в исходном (нулевом) положении якоря 3. Пластина 5 постоянно заполняет зазор между средними стержнями обоих сердечников . На среднем стержне сердечника 1 размещена первичная обмотка 7, а на крайних стержнях сердечника 2 расположены две секции 8 и 9 вторичной обмотки, включенные последовательно-встречно .
Дифференциально-трансформаторный датчик перемещений работает следую- . щим образом.
В исходном положении якоря 3 площади перекрытия крайних стержней сердечников 1 и 2 пластинами 4 и 6 якоря одинаковы, вследствие этого равны и ЭДС, наведенные в секциях 8 и 9 вторичной обмотки, благодаря чему сигнал на выходе датчика равен нулю. Указанное выполнение- якоря обеспечивает повышение стабильности нуля выходной характеристики датчика, так как взаимная индуктивная связь между первичной и вторичной обмотками датчика через потоки рассеяния, не модулированные его якорем, значительно уменьшена.
При угловом перемещении якоря 3, связьшаемого в процессе измерения с объектом контроля (не показан), площади перекрытия крайних стержней обоих сердечников ферромагнитными пластинами 4 и 6 якоря изменяются линейно в функции угла поворота якоря. В результате этого магнитное сопротивление одной ветви магнитопровода 2 увеличивается, а сопротивление другой ветви уменьшается, вследствие чего изменяются ЭДС, наводимые в секциях 8 и 9 вторичной обмотки.
Таким образом, на выходе дифференциально-трансформаторного датчика появляется сигнал, равный разности ЭДС, наведенных в этих секциях вторичной обмотки. Датчик практически нечувствителен к внешним электромагнитньм помехам, что повышает точность измерения угловых перемещений.
Формула изобретения
Дифференциально-трансформаторный датчик перемещений, содержащий два 3127 Ш-образных симметрично расположенных и обращенных один к другому стержнями феррЬмагнитных сердечника, размещенную на среднем стержне одного из них первичную обмотку, двухсекционную вторичную обмотку и размещенный в зазоре между сердечникаьга ферромагнитньш якорь, отличающийся тем, что, с целью повышения точности 9 при измерении угловых перемещении путем уменьшения влияния потоков расседния, секции вторичной обмотки размещены на крайних стержнях второго Ш-образного сердечника, якорь выполнен в виде нескольких механически связанных пластин и установлен с возможностью вращения в плоскости зазора.
| Агейкин Д.И | |||
| Датчики контроля и регулирования | |||
| М.: Машиностроение, 1965, с.142. |
