Изобретение касается линейных электродвигателей и предназначено для испол зования, преимущественно в транспортны устройствах. Известен линейный элекгроцвигатель репульсионного типа, содержащий G-образный магнитопровод, на котором разме щена обмотка, подключенная к источнику однофазного переменного тока через встречно-параТ лельные управляемые вентили, и вторичный элемент в виде метал лических пластин, расстояние между кото рыми равно ширине самих пластин l. Недостат5 ами этого элека родвигателя являются сравнительно низкие энергетические показатели и использование активных материалов, поскольку не удается использовать в процессе его работы мак симальное значение репульсионного усили а также в связи с тем, что в процессе работы возникает необходимость циклического отключейия первичных обмоток от источника питания. Известен и другой линейный электроцвигатель , содержащий иноуктор с магнитопроводом из отдельных сердечников, каждый ИЗ которых включает вертикальные стержни, соединенные горизонталыш1м ярмом, и подключенными к источнику пи тания через вентильный коммутатор катушками, из которых катушки, размещенные на расположенных через полюсное деление сердечниках, соединены между собой последовательно, и вторичный элемент в виде металлической полосы с отверстиями прямоугольной формы, расстояние между центрами которых равно полюсному делению 2. В конструкции такого электродвигателя реализуется возможность использования линейного тягового электродвигателя для создания вертикальных усилий на принципе выталкивания проводника с током изпод полюсов электромагнита, причем в этом случае такая система электродинамического подвеса оказывается конструктивно совмещенной с собственно линейным электродвигателем, а ее работа ста тически устойчива и не требует потребления дополнительной энергии от источника тания, так как энергия, необходимая для работы электродинамического подвеса, используется как энергия возбуждения электродвигателя. Однако конструкции электродвигателя как системы, обеспечивающей получение тяговых и подъемных усилий, свойственны и некоторые недостатки: при реальны .габаритах электродвигателя трудно полу читЬ величину суммарного подъемного усилия, обеспечивающего полный экипажа; это усилие может быть использовано только для разгрузки направляющих, кроме, того в таком электродвигателе Недостаточно эффективно используются активные материалы. Целью изобретения является улучшение 20
использования активных материалов и увеличение подъемного усилия.
Это достигается тем, что на внутренней боковой поверхности каждого вертикального стержня сердечников выполнены два паза, в которых размещены катушки, причем один из пазов расположен на уровне верхнего края вторичного элемента, а другой - на уровне нижнего края прямоугольных отверстий вторичного элемента. Кроме того, с целью обеспечения возможности независимого регулирования тягового и подъемного усилий, на вертикальных стержнях сердечников размещены дополнительные катушки, каждая из которых охватывает часть соответствующего стержня между его торцом и пазом, расположенным на уровне нижнего .края отверстий вторичного элемента, причем для стабилизации индуктора в поперетаюм направлении на внутренних боковых поверхностях вертикальных стержней выполнены прорези, в которых размещены токопроводящие пластины,
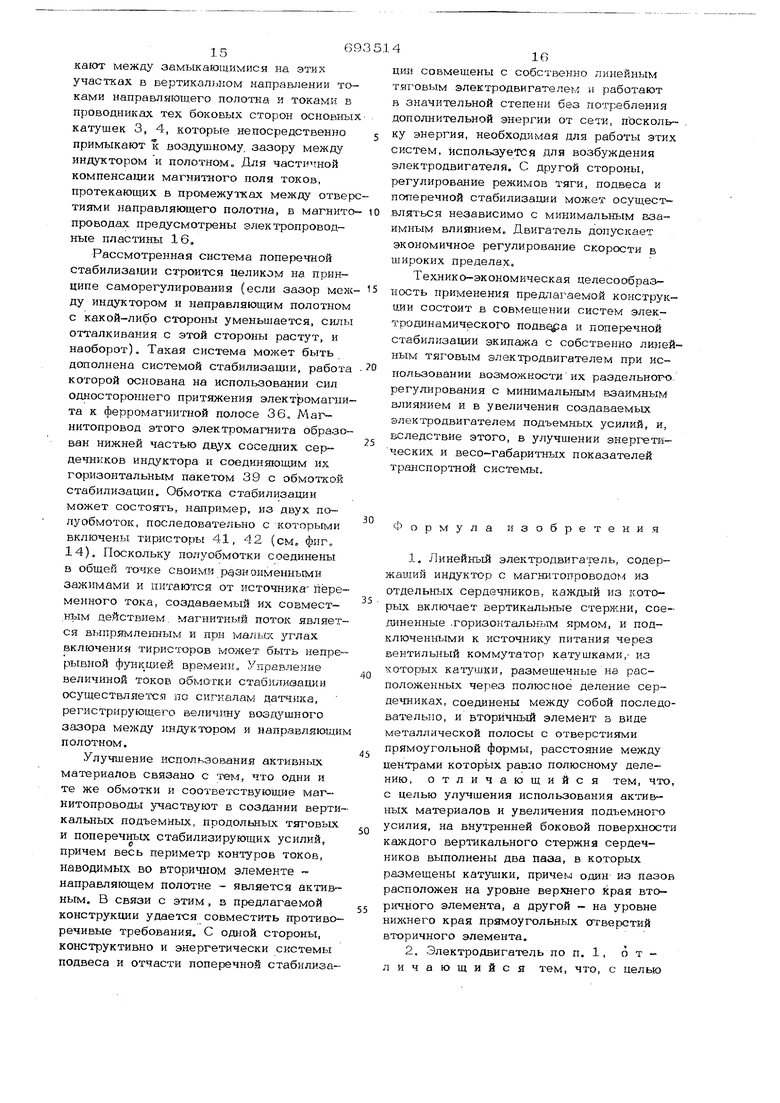
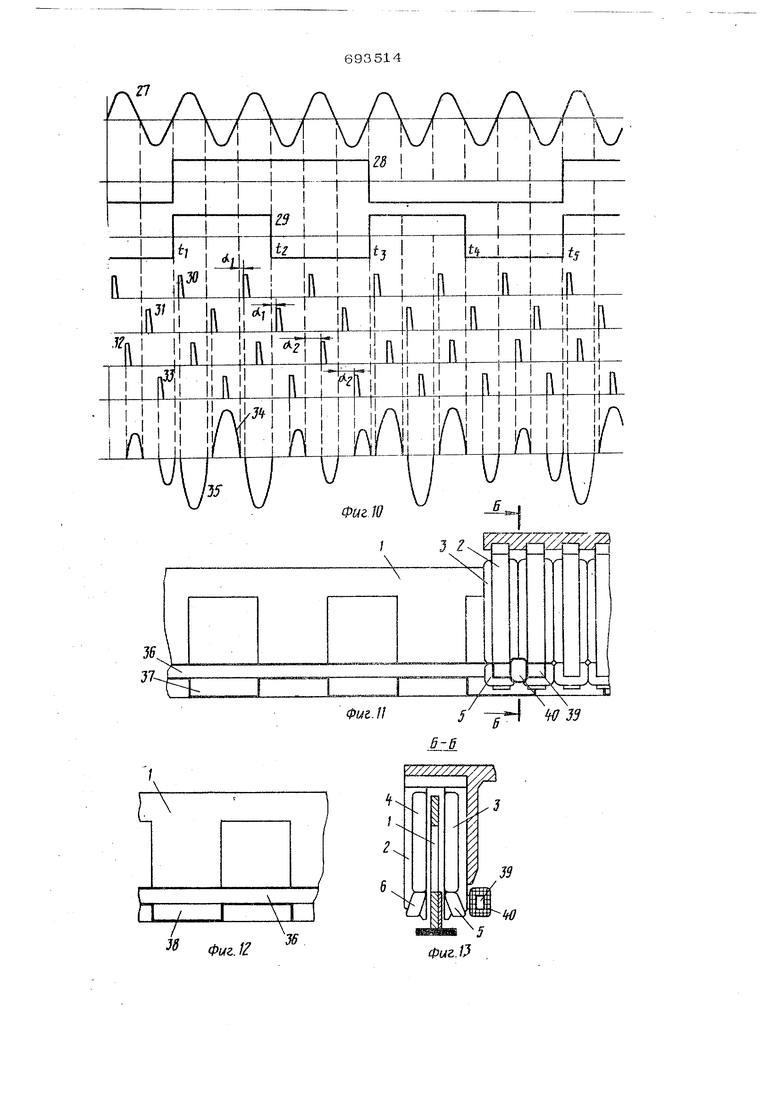
На фиг. 1 показан линейный электродвигатель; на фиг. 2 - разрез А - А на фиг. 1; на фиг, 3 - схема соединения основных и дополнительных катущек индуктора и их размещение в пазах сердечников; на 4|иг. 4 изображено взаимное пространственное расположение вторичног элемента и сердечников индуктора, а также показана картина распределения силовых линий магнитного поля, создаваемого обмотками индуктора, и направления индуктированных токов во вторичном элементе; на фиг. 5 иллюстрируется принцип возникновения поперечных стабили11 - вариант электродвигателя, обеспечивающий использование для поперечной стабилизации сил одностороннего притяжения полюсов электромагнита к ферромагнитной полосе, закрепленной на вторичном элементе; на фиг. 12 - вторичный элемент для варианта электродвигателя на фиг. 11; на фиг. 13 - разрез Б - Б на фиг. 11; на фиг. 14 - схема включения вспомогательной обмотки поперечной стабилизации; на фиг, 1 5 - элементы конструкции датчика линейного перемещения; на фиг. 16 - графики электромагнитных процессов датчика линейного перемещения, как функции времени.
Вторичный элемент (направляющее полотно) 1 электродвигателя представляет собой полосу металла с отверстиями прямоугольной формы шириной не мен половины полюсного деления и расстоянием между центрами отверстий, равным полюсному делению t . Полотно может быть собрано, например, из отдельных частей (линия их стыковки показана на фиг, 1 пунктиром), причем обеспечение электрического контакта между отдельными частями необязательно.
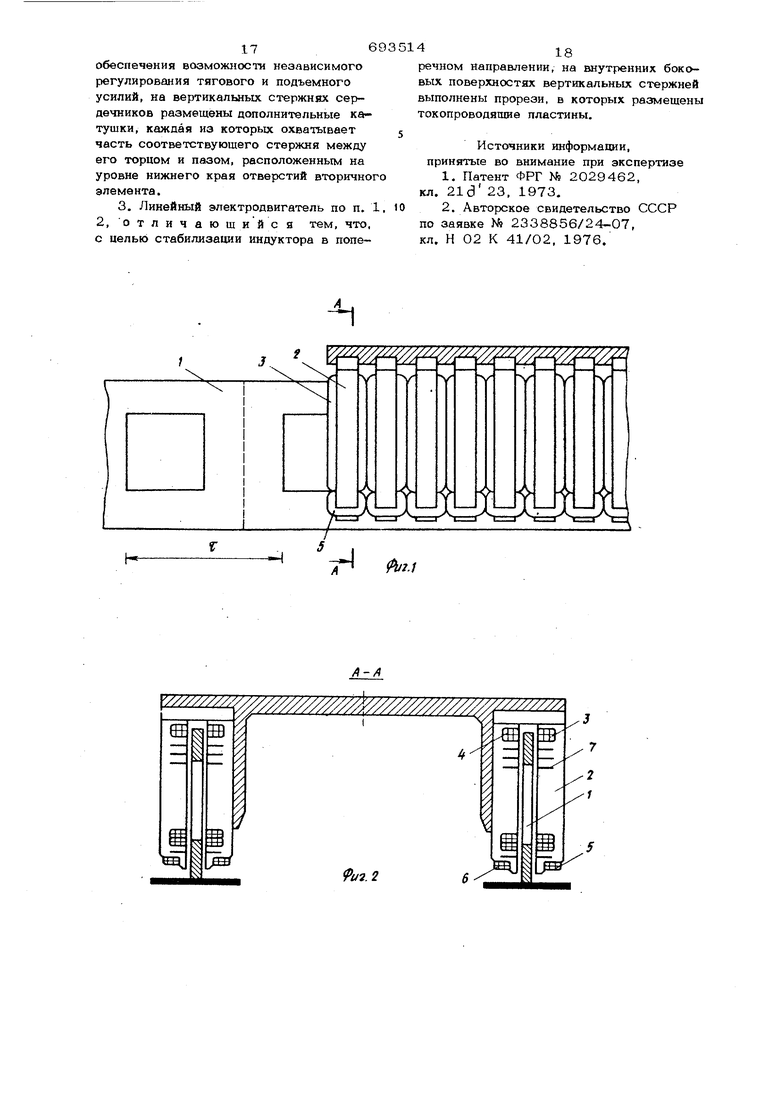
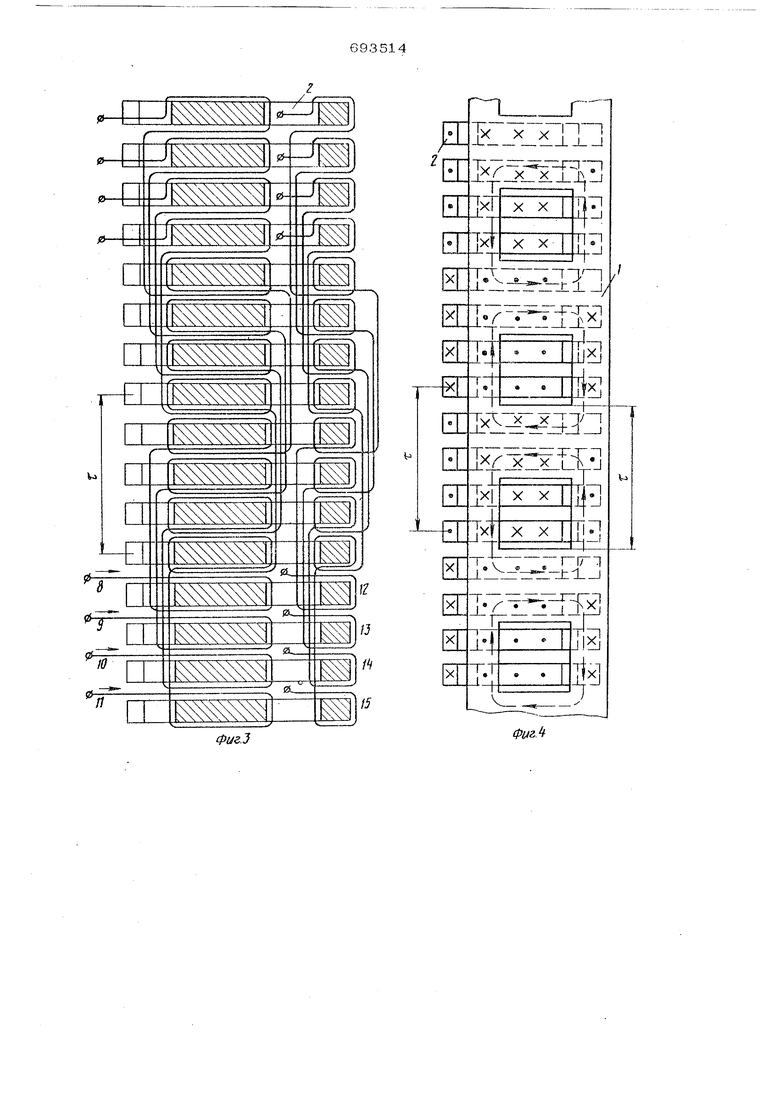
Активная часть расположенного на экипаже индуктора содержит магнитопровод из отдельных сердечников 2, образованных двумя охватывающими направляющее полотно вертикальными стержнями и замыкающим их сверху ярмом. В вертикальных стержнях имеются пазьг, формирующие верхний и нижний полюсные выступы, В указанных пазах, охватывая верхние полюсные выступы, размещены катущки 3,4 основной обмотки индуктор зирующих сил при нахождении магнитопровода в пределах прямоугольного отверстия во вторичном элементе; на фиг. 6 - вариант конструкции сердечника, в стержнях которого размещены в прорезях пластины из металла с малым удельным сопротивлением; на фиг. 7 - конструкция основной и дополнительной катушек индуктора, а также иллюстрируется принцип возникновения поперечных стабилизирующих сил лри нахождении магнитопровода в пределах промежутка между отверстиями во вторичном элементе; на фиг. 8 - схемы секций основной и дополнительной Обмоток индуктора при выполнении их двойным проводом в виде двух полусекций; на фиг. 9 - схема вентильного коммутатора электродвигателя; на фиг. 10 - графики электромагнитных процессов в электродвигателе, как функции времени; на фиг. KaryuiKii G, 6 дополнительной обмотки охватывают нижний полюсный выступ, пр чем верхняя часть контура катушки поме щена в нижнем пазу, а нижняя часть охватывает нижний полюсный выступ с внешней стороны и экранирована от воздушного зазора между магннтопровод и направляющим полотном краем нижнег пол осного выступа. Между верхним и нижним пазами, на уровне перемычек над прямоугольными отверстиями направляющего полотна, а также между нижним пазом и торцом вертикальных стержней имеются горизонтальные прорези, в которых помещен токопроводящие металлические пластины 7. Для обеспечения устойчивой работы систем подвеса и поперечной стабилизации, а также и по конструктивным соображениям, на экипаже наиболее удобно разместить два индуктора и предусмотре соответственно два вторичных элемента, как это показано на фиг, 2, В этом слу чае основные обмотки двух индукторов могут быть соединены последовательно и включены в общую схему вентильного коммутатора. Аналогично могут быть соединены и дополнительные обмотки двух индукторов, однако лучше, если они будут включены в отдельные схемы ком мутаторов, в связи с чем сохранится BO можность независимого регулирования в них величины токов. Число сердечников индуктора в преде лах полюсного деления 2 равно числу секций основной обмотки, которое, в свою очередь, равно числу секций дополнительной обмотки. На фиг. 3 представлена четырехполю ная конструкция электродвигателя с числом секш1й основной и дополнительной, обмоток, равным четырем. Общее количество сердечников магнитопровода инду тора равно, таким образом, произведени числа полюсов на число сек1шй основной (или дополнительной) обмотки. Секции 8-11 основной обмотки индуктора состоят из последовательного соединения катушек 3,4, помещенных на сердечниках с линейным расстоянием между ними, равным f , так что общее число таких катушек в секции равно удвоенному числу полюсов электродвигател При этом катушки, помещенные в пазах Двух вертикальных стержней одного и того же сердечника, например, катушки 3 и 4 на фиг. 2, соединены последоваельно и согласно, составляя, суммарную сновную обмотку одного сердечника условно показаны в виде одновитковых бмоток на фиг. 3), а подобные суммаршз е обмотки, расположенные на сердечниках с линейным расстоянием между, ними, равным полюсному делению, соединены последовательно и встречно. Аналогично соединены катушки дополнительной обмотки индуктора, образуя секции 12 - 15, Поверхности полюсных выступов на фиг. 3 заштрихованы. При обтекании переменным током основных и дополнительных обмоток они создают переменнополюсные магнитные поля, силовые линии которых замыкаюгся в плоскостях, перпендикулярных плоскости направляющего полотна. На фиг, 4 условно показаны мнгновенные напраЕшения силовых линий этих полей, пунктиромнаправление токов, индуктированных в короткозамкнутых контурах направляющего полотна. Обмотки на фиг, 4 не изображены. Конфигурация обмоток, а также мгновенные направления токов R них даны на фиг, 3, На,фиг; 5 представлена конструкция сердечника индуктора и его катушек, а также указаны мг новенные направления токов в основных катушках 3, 4, дополнительных катушках 5, 6 и мгновенные направления силовых линий потоковф, и Ф , созданных этими обмотками, мгновенные направления токов в направляющем полотне, когда магнитопровод находится в пределах прямоугольного отверстия, а также направления токов, индуктируемых в токопроводяишх пластинах 7 магнитным потоком, созданным токами направляюишго полотна. На фиг, 6 показано, что вертикальные стержни сердечников могут включать продольные пластины 16 из металла с малым удельным сопротивлением. На фиг. 7 представлена конструкция катушек основных и дополнительных обмоток, а также мгновенные направления токов в основных катушках и в направляющем полотне, когда соответствующий сердечник находится в пределах промежутка между прямоугольными окнами. Показано, в частности, что одна боковая сторона основной катушки (показана сплошными линиями) непосредственно примьшает к воздушному зазору меж1;у сердечником и направляющим полотном, а другая сторона (показана пунктиром) по возможности удалена от этого зазора. Такая конструкция позволяет, во-первых, умень шить, дасстоямие между сердечниками, во-вторых использовать боковые части контура этих катушек для создания поперечных стабилизирующих сил. На фиг. 8 показано, что в частном случае, каждая секция основной обмотки индуктора может быть-выполнена двойным проводом и состоит в этом случае из двух одинаковых полусекций, наприме 17, 18, помещенных на одних и тех же сердечниках. Аналогично, каждая секция дсшолнительной обмотки может быть выполнена в виде двух полусекций, например 19, 20. На фиг. 9 приведена одна из возможных схем коммутатора электродвигателя с питанием от сети однофазного перемен ного тока. В такой коммутатор могут включаться основные, так и дополни тельные обмотки. Например, полусекция 17 основной обмотки включена в диагональ мостовой схемы, образованной управляемыми вентилями (тиристорами) 21 - 24. Полусекция 18 включена в диагональ аналогичной мостовой схемь, образованной тиристорами 23 -26, причем тиристоры 23, 24 являются общимИ для двух мсютовых схем. Аналогично вкл чень полусекции остальных секций обмот ки. Схема коммутатора исключает возни новение режимов короткого замыкания источника питания. На фиг. 1О представлены графики электромагнитных процессов электродвигателя, как функции времени. На этой фигуре приняты следующие обозначения: 27 - напряжение источника питания, 28, 29 - управляющие напряжения, формируемые по сигналам датчика Линейног перемещения, последовательности импуль сов ЗО, 31, 32, 33 управления тиристо рами коммутатора, синхронизированные с напряжением источника питания, после довательность импульсов 34 тока в одн из двух полусекций (например 17) секции основной обмотки индуктора, последовательность импульсов 35 тока во второй полусекции (18) секции основной обмотки. На фиг, 11, 12, 13 представлен кон структивный вариант электродвигателя, обеспечивающий использование для поперечной стабилизации индуктора сил одностороннего притяжения полюсов элек тромагнита к ферромагнитным полосам 36, закрепленных на направляющем полотне 1, причем верхний край полосы совпадает с нижним краем прямоугольных отверстий. Если используется электродвигатель с одним индуктором и одним направляющим полотном, то полосы Зб закрепляются с обеих сторон направляющего полотна; если используется электродвигатель с двумя индукторами, то полосы 36 закрепляются, соответственно, на двух направляющих полотнах, изнутри или снаружи, как это показано на фиг. 11, 12. Снизу к одной полосе примыкают ферромагнитные элементы 37 (см. фиг. 11, 15), имеющие длину, равную продольной ширине отверхзтия и располагающиеся под отверстиями, к другой ферромагнитной полосе примыкают ферромагнитные элементы 38, по длине равные промежутку между двумя отверстиями и располагающиеся в пределах этих промежутков. На рядом расположенных сердечниках закреплены горизонтальные пакеты 39 с катушками 4О стабилизации, примыкающие к внешним боковым поверхностям сердечников на уровне нижних полюсных выступов. Эти пакеты располагаются на сердечниках только с той стороны направляющего полотна, на которой закреплена ферромагнитная полоса 36. Максимальное количество таких пакетов для одноГО индуктора вдвое меньше числа сердечников индуктора, однако можетбыть предусмотрено, например, всего два пакета, соединяющие пары крайних сердечников. На фиг, 14 представлена схема включения обмоток стабилизации. Катушки 40 обмотки стабилизации могут быть выполнены также двойным проводом, причем две половины обмотки соединены в общей точке своими разноименными зажимами. Последовательно с ними включены управляющие тиристоры 41, 42. Обмотки питаются от источника однофазного переменного тока. Ферромагнитная полоса 36 может являться также вторичным элементом датчиков, контролирующих величину зазора между индуктором и направляющим полотном, а при наличии ферромагнитных элементов 37, 38 - вторичным элементом датчика линейного перемещения, функции которого аналогичны функциям датчика углового положения ротора в вентильных электрических машинах с вращающимся ротором. в качестве первичных элементов датчика линейного перемещения применены трансформаторы с П-образными сердечниками 43, 44, на которых размещены подключенная к источнику однофазного переметюго тока первичная обмотка 45 и выходная обмотка 46. В целом первичный элемент датчика представляе собой схему дифференциального трансфор матора. На фиг. 15 показаны пунктиром мгновенные направления силовых линий магнитного поля, создаваемого первично обмоткой. Число указанных дифференциальных трансформаторов равно числу секций осн ной или дополнительной обмоток, линейное расстояние между ними вдоль ферромагнитной полосы 36 соответствует расстоянию между центрами сердечников индуктора. На фиг. 16 представлены графики электромагштных процессов датчика ли нейного перемещения, как функции врем и приняты следующие обозначения: 27 напряжение ис-гочника питания, 47 ЭДС выходной обмотки 46 дифференциального тран.сформатора. Линейный электродвигатель работает следующим образом. Каждый дифференциальный трансформ тор датчика линейного перемещения в процессе движения обеспечивает цикличе кое опрокидывание фазы ЭДС выходной обмотки, как это показано на фиг. 16 (моменты времени ,,, Действительно, верхние стержни сердечников 43, 44 датчика в процессе движе nocTosraHo находятся против ферромагнит ных полос 36, а нижние стержни в пред лах каждого полюсного деления попеременного оказываются либо напротив фер ромагнитных элементов 37 (или 38), либо в промежутках между ними. Элементы 37 закреплены под отверстиями направляющего полотна, элементы 38 в промежутках между отверстиями. Поэтому, если дифференциальный трансформатор, собранный на сердечниках 43, 4 находится в пределах отверстия, то условия замыкания магнитных потоков в сердечниках датчика различны: поток, создаваемый первичной обмоткой в сердечнике 43, замыкается частично по ферромагнитной полосе 36 и в значител ной степени по воздуху, поток в сердеч нике 44 - по ферромагнитной полосе и ферромагнитному элементу 37. После прохояшения дифференциальным трансфор матором границы отверютия условия замыкания указанных магнитных потоков меняются на обратные, что приводит к опрокидыванию фазы ЭДС 47 выходной обмотки датчика. Следующее опрокидывание фазы выходной ЭДС произойдет на границе соседнего отверстия в напраш1як щем полотне, и т.д., два раза в пределах каждого полюсного деления электродвигателя. Выходная ЭДС 47 датчика используется в качестве входного сигнала для фазочувствительного выпрямителя, обеспечивающего формирование управляющего напряжения 29 (см. фиг. 1О), полярность которого меняется в моменты ( Ь. - t опрокидывания фазы выходной ЭДС. Управляющее напряжение 28 может быть сформировано из напряжен):я 29 делением частоты на два; таким образом, изменение полярности напряжения 28 происходит один раз в пределах полюсного деления. Схема управления формирует такж:е четыре последовааельности импульсов управления 30, 31, 32, 33, синхронизированных с напряжением питания. Последовательности 30, 31 сдвинуты относительно друг друга на половину периода. Угол сдвига d- импульсов относительно начала соответствующих полупериодов напряжения питания может регулироваться, но одновременно для.обеих последовательностей. Угол сдвига ci. импульсов в последовательностях 32, 33 также-.изменяется одновременно. Углы d, и «з регулируются независимо друг от друга. Ь1апряжение 29 управляет логической схемой, , в зависимости от полярности этого напрякения, пропускает на выход либо последовательности 30, 31 либо последоват-ельности 32, 33. Вторая логическая схема (распределг.те.чь импульсов) , Б завис гмости от полярности управляющего напряжения 28, распределяет пропущенные первой логической схемой последовательности импульсов между тиристорами 21 - 26 коммутатора, KoNfмутация состоит в данном случае в последовательном во времени опрокидывании фазы переменного магнитного потока, создаваемого каждой секцией основной и дополнительной обмоток, и ocyuiecTBляется следующим образом. Предположим, в течение некоторого интервала времени t - 12 (см, фиг. 10) на вход второй логической схемы поступают только две последовательности импульсов 30 и 31. При существующей в этом интервале времени полярности напряжения 28 последовательность импульсов 30 подается, например, на тирисуоры 21 - , а последовательность Импульсов 31 - на тири торы 23 - 2б. В один из полупериодов напряжения питания ток протекает, напри мер, по цепи: тиристор 21, полусекция 17, тиристор 24. В следующий полупери од полярность напряжения на клеммах меняется и ток течет по цепи: тиристор 26, полусекция 18, тиристор 23, Поэтому псхзледрвательйрсти импульсов 34, 35 тока в полусекциях 17, 18 имеют различное направление (если считать относительна одноименных зажимов обмоток). Суммарный магнитный поток секции является переменным, пульсирующим с частотой питания. В следующем интервале t 3 полярность напряжения 29 изменится; на вход логической схемы распределителя поступают только последовательности импульсов 32, 33. Однако полярность напряжения 28 не изменилась поэтому не изменится и закон переключе ния тиристоров. Угол же включения d 2 может быть отличен от oLj , в связи с чем появляется возможность независимого регулирования величины импульсов 34, 35 тока в обмотках в указанных интервалах i - -fc -Ьд - В следующий интервал времени iy,--b на вход распределителя поступают снова последовательности 11мпульсов 30, 31; но при изменений полярности управляюще го напряжения 28 распределитель обеспе чивает поступление в первый (положитель ный) полупериод напряжения питания последовательности импульсов 30 на тиристоры 23 - 26, а второй - последовательности импульсов 31 на тиристоры 21 - 24, т.е. осуществляют переключени последовательностей импульсов 30, 31 управления с одной пары тиристоров (21 22) на другую (25, .26), что. приводит к опрокидыванию фазы магнитного потока создаваемого совместным действием дву полусекций. Таким образом, рассмотренная система управления обеспечивает реализацию Следующего закона регулирования: 1, Обеспечивается возможность независимого регулирования величины переменного магнитного потока, создаваемого данной секцией основной обмотки индуктора в интервалах времени, когда сердечники секции находятся в пределах прямоугольного отверстия в направляющем полотне, или в промежутках между отверстиями. 2. Осуществляется автоматическое опрокидывание фазы переменного магни1 ного потока данной секции каждый раз, когда сердечники, на которых размещены катущки секции, в процессе движения перемешаются из зоны промежутка между отверстиями в зону следующего отверстия; опрокидывание фазы потока происходит, таким образом, на границе отверстия. В аналогичный коммутатор включены и секции дополнительной обмотки индуктора, однако для его работы используются только две последовательности импульсов управления, аналогичных, например, последовательностям импульсов ЗО, 31, и распределитель импульсов, управляемый напряжением 28; первая логическая схема, управляемая напряжением 29, исключается. Описанный способ соединения катущек в секциях основной и дополнительной обмоток (см. фиг. 3, 8) и циклическая, последовательная во времени коммутация токов в них обеспечивают в процессе движения образование в каждый момент времени в пределах любых соседних полюсных делений электродвигателя магнитных полей разных направлений (см, фиг. 4), силовые линии которых замыкаются в плоскостях, перпендикулярных направляющему полотну. Взаимная пространственная ориентация магнитных потоков, созданных совместным действием всех секций основной и дополнительной обмоток, и токов, индуктированных в короткозамкнутых контурах Направляющего полотна, остается в процессе движения практически неизменной (как это показано на фиг. 4), причем обмотки индукторе создают магнитное поле, пульсирующее с частотой питающей сети и линейно перемещающееся относительно индуктора со скоростью, равной скорости движения индуктора, но в противоположную сторону, и поэтому неподвижное относительно короткозамкнутых контуров с токами в направляющем полотне. Исключение составляют крайние контуры, в связи с чем предпочтительна конструкция электродвигателя в многополюсном исполнении. Поэтому в первом приближении можно считать, что в контурах направляющего полотна индуктируется только трансформаторная ЭДС с частотой сети, в связи с чем в процессе движения на вторичный элемент электромагнитным путем передается только часть энергии, потребляемой от сети. Частота индуктированных в направляющем
полотне токов практически равна частоте напряжения сети при любой скорости движения экипажа.
Секции основной обмотки индуктора, сердечники которых находятся в данный момент в пределах отверс-гай направляющего полотна (см. фиг. 4), индуктируют в его короткозамкнутых контурах переменные токи, замыкающиеся вокруг отверстий; эти секции в указанный момент времени выполняют функцию обмоток возбуждения. Взаимодействие магнитных потоков индуктора с токами направляющего полотна на участках верхних перемычек над отверстиями приводит к возникновению вертикальных подъемных усилий. Взаимодействие магнитных потоков, создаваемых секциями основной обмотки индуктора, сердечники которых находятся в данный момент между отверстиями, с токами в контурах направляющего полона приводит к возникновению продольных тяговых усилий, причем указанные секции в этом интервале времени выполняют функцию обмоток якоря.
Токи в секциях возбуждения и в секциях якоря, а, следовательно, подъемные и тяговые усилия, как было отмечено выше, могут регулироваться относительно независимо.
Секции дополнительной обмотки, помещенные на нижних полюсных выступах магнитопроводов, создают переменные магнитные потоки, взаимодействие которых с токами в нижних перемычках под отверстиями направляющего полотна также приводит к возникновению вертикальных подъемных усилий. Поскольку секшш дополнительной обмотки включены в отдельный вентильный коммутатор, эти подъемные усилия могут регулироватся независимо от подъемных усилий, создаваемых основной обмоткой.
Таким образом, весь периметр короткзамкнутых контуров (см. фиг. 4) являет ся активным, г аимодействзющие с потоками индуктора токи на его горизонтальных участках (над и под отверстиями) участвуют в создании подъемных усилий, а токи на вертикальных участках (между отверстиями) - в создании продольнъ1х тяговых усилий.
При этом основной принцип управлени может состоять, например, в следующем Величина токов в тех секциях основной обмотки, которые в данный момент выполняют функцию обмоток возбуждения, не регулируется и остается постоянной
( В смысле действующего значения). Это обеспечивает стабильные условия возбуждения электродвигателя и относительно постоянные значения токов в направляющем полотне. При этом вертикальное усилие подъема, создаваемое этой обмоткой, также относительно постоянно. Вторая составляющая подъемного усилия, создаваемая дополнительной обмоткой, может регулироваться в широких пределах и обеспечивать условия стабильного подвеса экипажа, однако изменение величины токов в секциях пополнительной обмотки, необходимое для такого регулирования, мало С.-азывается на величине Tsn OBoro усилия, что и обеспечивает независимость управления величиной подъемных и тяговых усилий.
Следует отметить, что применяемая в предлагаемой конструкции система электродинамического подвеса работоспособна во всем диапазоне скоростей движения и является статически устойчивой, поскольку при вертикальном смеи1ении индуктора относительно направляющего полотна снизу-вверх величина суммачного подъемного усилия, при прочих равных условиях, уменьшается. Большая часть энергии, необходимой для работъ системы подвеса, используется как энергия возбуждения собственно линейного тягового электродвигателя.
Поперечная стабилизация экипажа, т.е. стабилизация положения направляющего полотна в зазоре между полюсам и индуктора, построена на принципе отталкивания проводников с токами различных направлений и иллюстрируется фиг. 5,6,7. На фиг. 5 показано, что подобные силы отталкивания, поперечные по отношению к направлению движения, возникают между токами в верхних перемычках направляющего полотна и токами в прово1шиках основных катушек 3, 4, расположенных в верхних пазах магнитопроводов индуктора; между токами в нижних перемычках и токами в проводниках основных катушек 3, 4 и дополнительных катушек 5, б, расположенных в нижних пазах сердечников индуктора, а также между токами в перемычках и токами в пластинах 7, индуктированных магнитным полем токов направляющего полотна. Эти пластины используются также и для частичной компенсации указанного магнитного поля.
Когда сердечники находятся в пределах промежутка между отверстиями направляющего полотна, силы отталкивания возни- кают между замыкающимися на этих участках в вертикальном направлении то ками направляющего полотна и токами в проводниках тех боковых сторон основны катушек 3, 4, которьге непосредственно примыкают к воздушному, зазору межд индуктором и полотном. Для частичной компенсации магмигаого поля токов, протекающих в промежутках между отве направляющего полотна, в магнит проводах предусмотрены электропроводные пластины 16. Рассмотренная система поперечной стабилизации строится целиком на принципе саморегулирования (если зазор мех ду индуктором и направляющим полотном с какой-либо стороны уменьшается, силы отталкивания с этой стороны растут, и наоборот), Такая система может быть дополнена системой стабилизашш, работ которой основана на использовании сил одаостороннего притяжения электромагни та к ферромагнитной полосе 36, Магнитопровод этого электромагнита образо ван нижней частью двух соседних сердечников индуктора и соединяющим их горизонтальным пакетом 39 с обмоткой стабилизааии. Обмотка стабилизащ1и может cocTosjTb, например, из двух полуобмоток, последовательно с которьми включень тиристоры 41, 42 (см фиг, 14), Поскольку полуобмотки соединены. в общей точке своими разноименными зажимами и питаются от источника пере менного тока, создаваемый их совмест.нъ1м действием, магнитный поток являет ся вьгпрямленным и при мальо; углах включения тиристоров может быть непрерывной функш1ей времен. Управление величиной токов обмотки стабилиаации осуществляется по сигналам , регистрирующего возодшного зазора между индуктором и направляющи полотном. Улучшение использования активных материалов связано с тем, что одни и те же обмотки и соответствующие маг- нитопроводы участвуют в создании верти кальных подъемных, продольных тяговых и поперечных стабилизирзющих усилий, причем весь периметр контуров токов, наводимых во вторичном элементе направляющем полотне - является активным. В связи с этим, в предлагаемой конструкции удается совместить противо речивые требования, С одной стороны, конструктивно и энергетически системы подвеса и отчасти поперечной стабилизации совмещены с собственно линейным тяговым электродвигателем и работают в значительной степени без потр-ебления дополнительной энергии от сети, поскольку энергия, необходимая для работы этих систем, используется для возбуждения электродвигателя. С другой стороны, регулирование режимов тяги, подвеса и поперечной стабилизации может осуществляться независимо с минимальным взаимным влиянием Двигатель допускает экономичное регулирование скорости в широких пределах. Технико-экономическая целесообразность применения npeAnaraevioE конструкции состоит в совмещении систем электрошдаамического и поперечной стабилизации экипажа с собственно линейным тяговым электродвигателем при использовании возможкости их раздельного, регулирования с минимальным взаимным влиянием и в увеличении создаваемых электродвигателем подъемных усилий, и, вследствие этого, в улучшении энергетических и весо-габаритных показателей транспортной системы. Формула изобретени.ч 1.Линейный электродвигатель, содержащий индуктор с магнитопроводог из отдельных сердечников, каждый из которых включает вертикальные стержни, соединенные .горизонтальным ярмом, и подключенными к источнику питания через вентильный коммутатор катушками, иа которых катушки, размешенные на расположенных через полюсное деление сердечниках, соединены между собой последовательно, и вторичный элемент в виде металлической полосы с отверстиями прямоугольной формы, расстояние между центрами которых равао полюсному делению, отличающийся тем, что, с целью улучшения использования активных материалов и увеличения подъемного усилия, на внутренней боковой поверхности каждого вертикального стержня сердечников выполнены два паза, в которых размещены катушки, причем один из пазов расположен на уровне верхнего Края вторичного элемента, а другой - на уровне нихшего края прямоугольных отверстий вторичного элемента. 2.Электродвигатель по п. 1, отличающийся тем, что, с целью
обеспечения возможности независимого регулирования тягового и подъемного усилий, на вертикальных стержнях сердечников размещены дополнительные катушки, каждая из которых охватывает часть соответствующего стержня между его торцом и пазом, расположенным на уровне нижнего края отверстий вторичного элемента.
3. Линейный электродвигатель по п. 1, 2, отличающийс я тем, что, с целью стабилизации индуктора в поперечном Направлении, на внутренних боковых поверхностях вертикальных стержней выполнены прорези, в которых размешены токопроводящие пластины.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 2029462, кл. 21d 23, 1973.
2.Авторское свидетельство СССР по заявке N 2338856/24-07,
кл. Н 02 К 41/02, 1976.


| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный электродвигатель | 1977 |
|
SU736286A1 |
| Линейный электродвигатель | 1976 |
|
SU655038A1 |
| Вентильный электродвигатель | 1977 |
|
SU765946A1 |
| Репульсионный вентильный электродвигатель | 1977 |
|
SU666619A1 |
| Линейный синхронный электродвигатель | 1983 |
|
SU1169099A1 |
| Вентильный электродвигатель | 1978 |
|
SU758416A1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОЙ ПОДВЕСКИ И ТЯГИ ЭКИПАЖА ТРАНСПОРТНОГО СРЕДСТВА | 1982 |
|
SU1145585A1 |
| Линейный индукторный электродвигатель | 1984 |
|
SU1226578A1 |
| ЛИНЕЙНЫЙ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1986 |
|
SU1371370A1 |
| Индуктор асинхронного электродвигателя | 1982 |
|
SU1083304A1 |


n
Фиг.З
.
7
Фг
Л
л
т
JTjy
Фиг 5
/5
Фиг.7
Mf
WV AyVA
/8
17
i
,fZ Vf
-л 0 t f
V
Фи.9 VVAV
Фиг. //
Фиг.}
36
r g
Фиг If
YC
Фиг. 15
/. I 1 1 / 1 /
xA/ AAyv/w vTv/
e./ff
