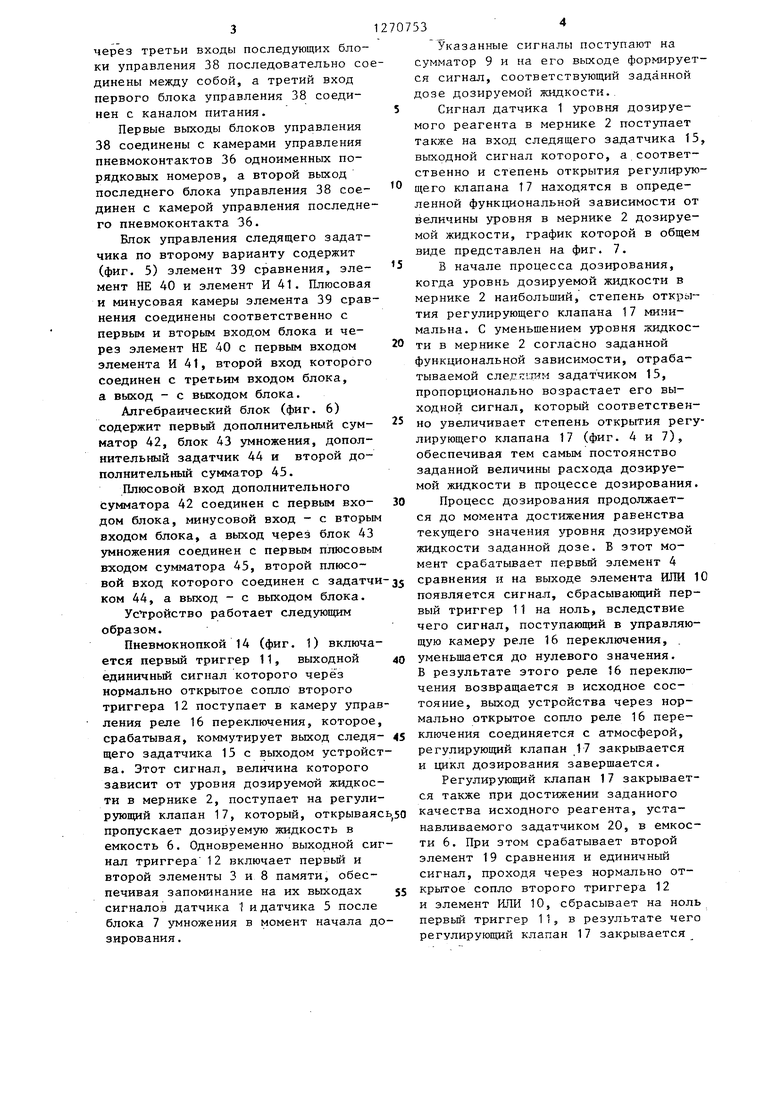
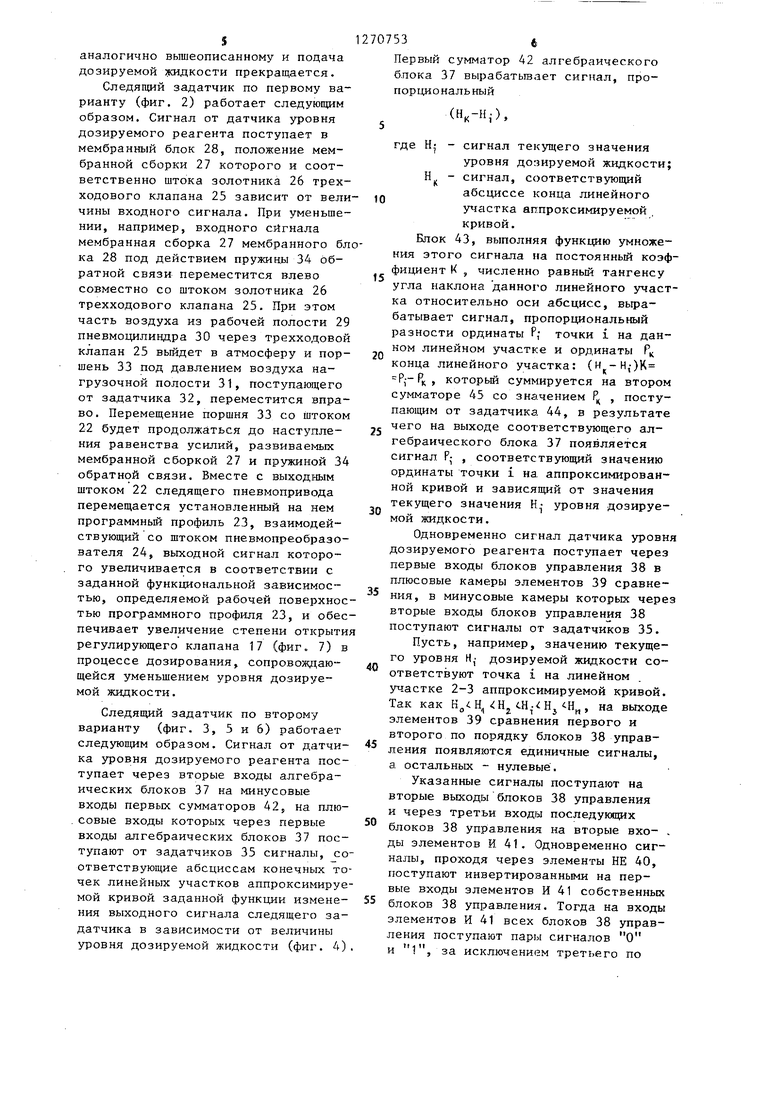
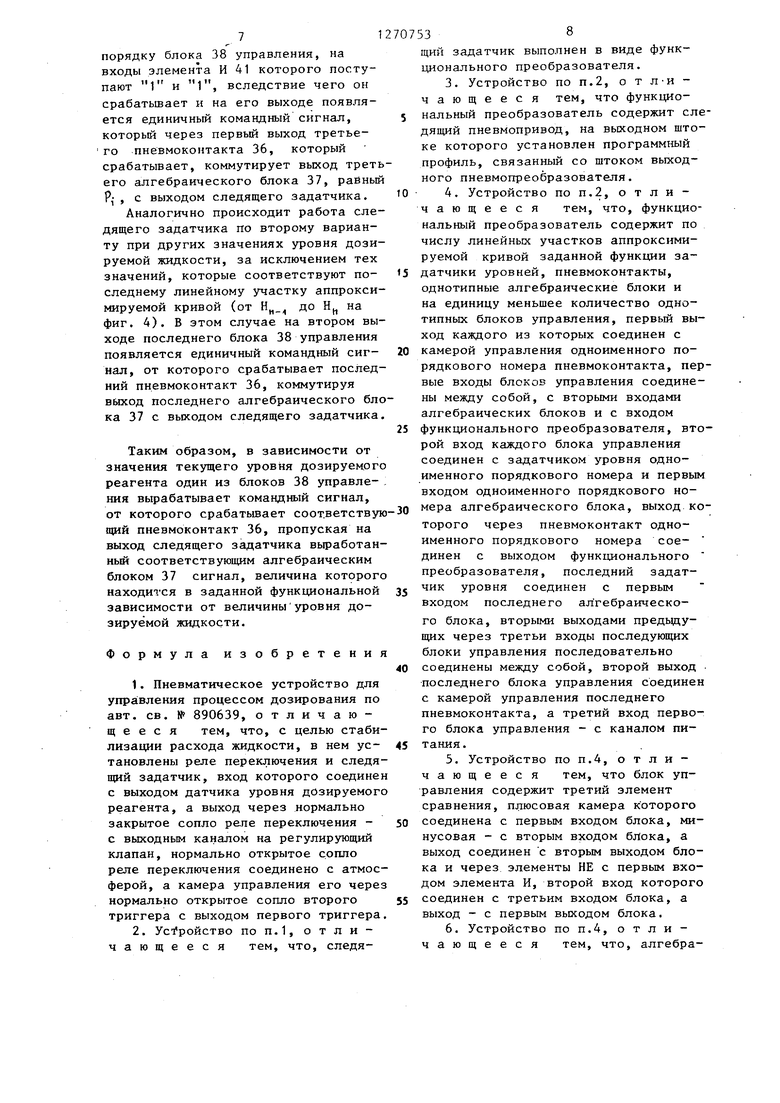
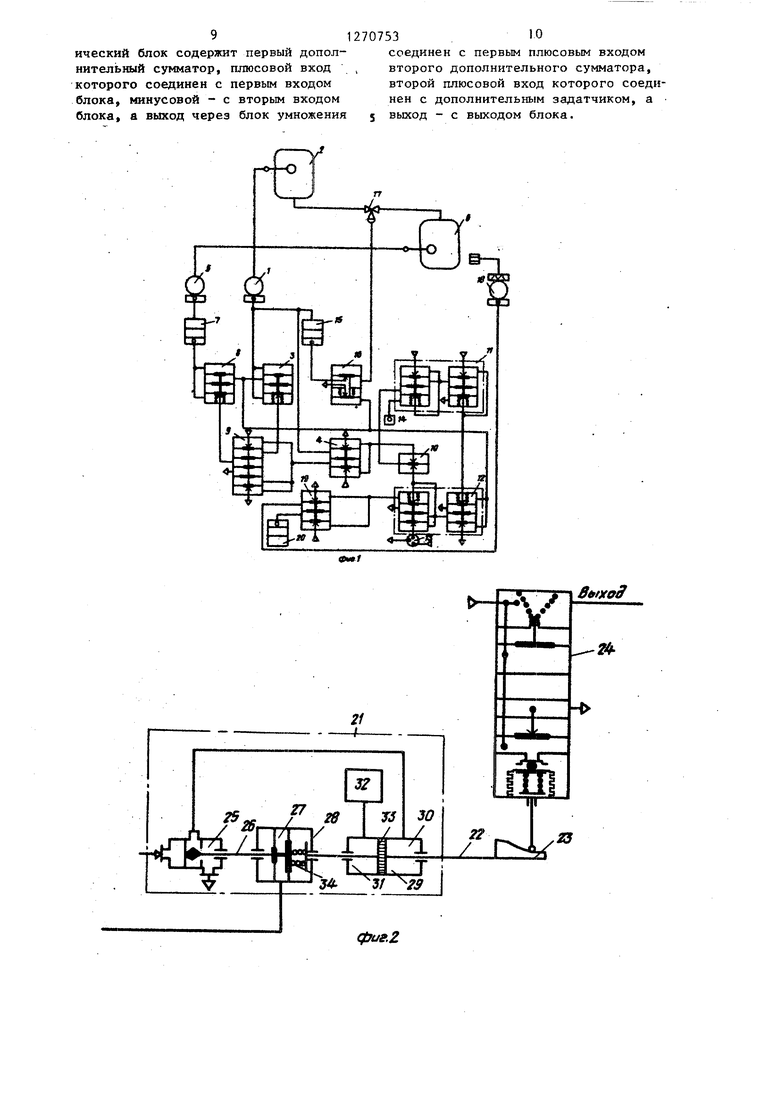
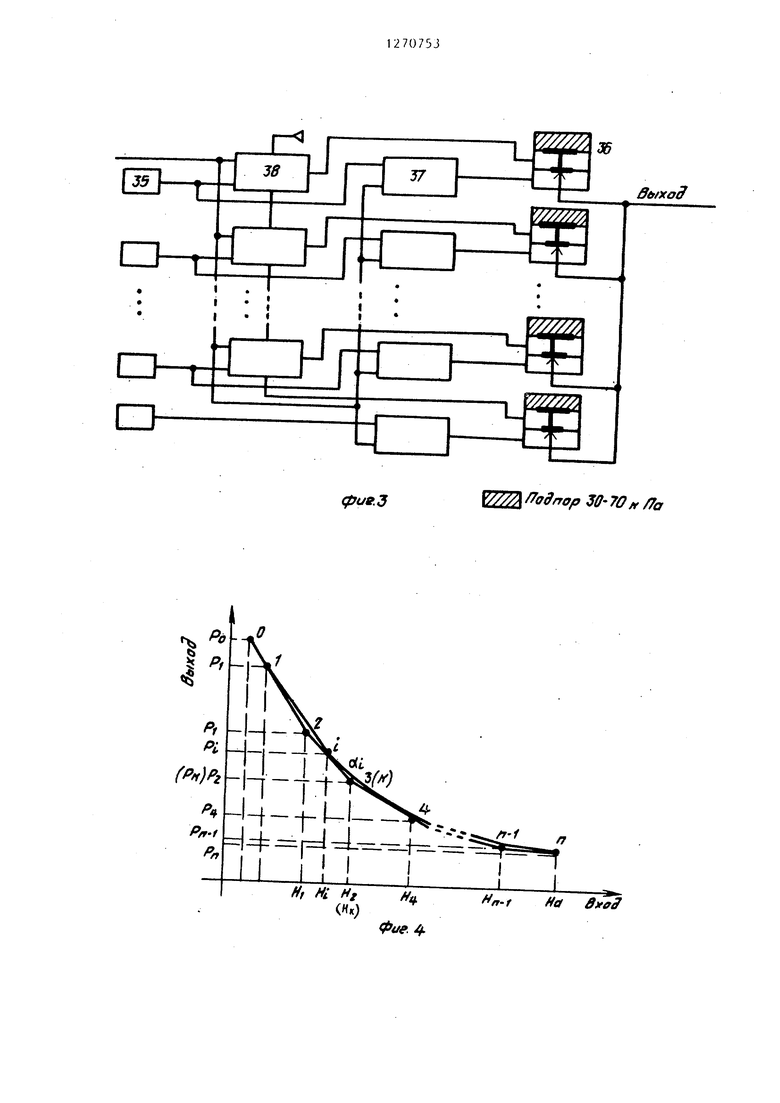
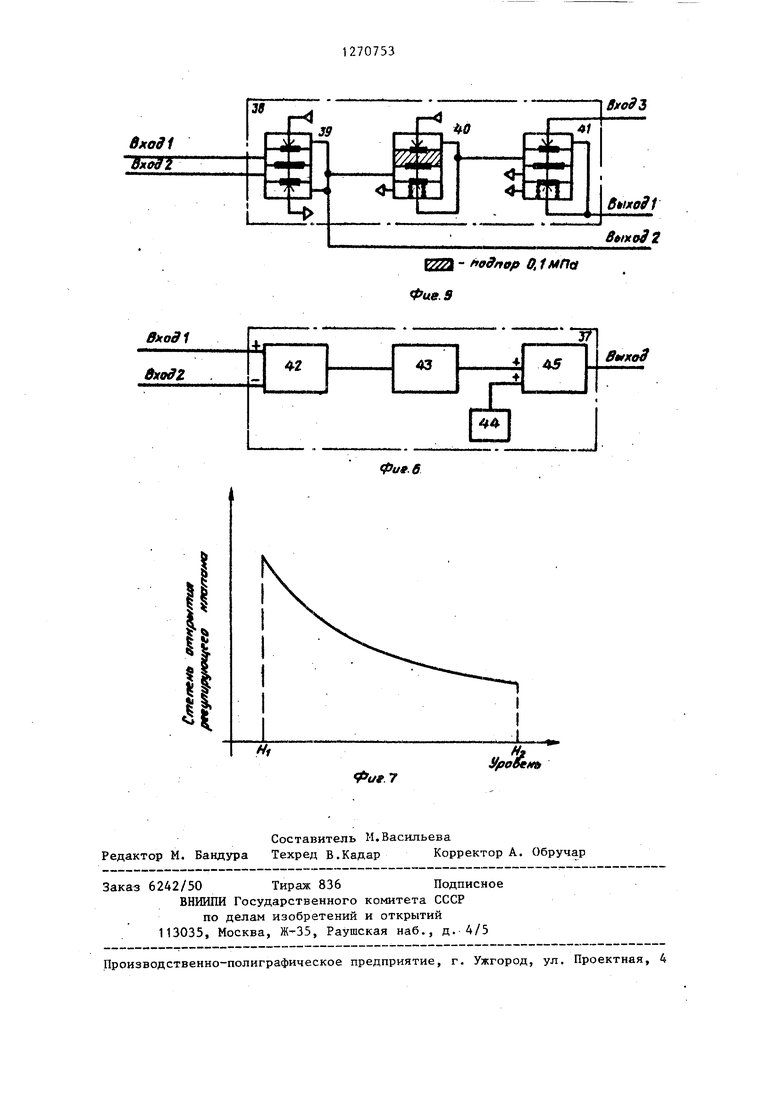
Изобретение относится к приборостроению, а именно к пневматическим устройствам для управления дозированием жидкостей, и может быть использовано преимущественно в нефтеперерабатьшающей и химической промьплленности и является усовершенствованием устройства по основному авт. ев, № 890369. Цель изобретения - стабилизация расхода жидкости при дозировании. На фиг. 1 показана принципиальная схема предлагаемого устройства; на фиг. 2 - принципиальная схема следящего задатчика по первому варианту; на фиг. 3 - структурная схема следящего задатчика по второму варианту; на фиг. 4 - аппрркс ; мируемая кривая заданной функции, общий вид; на фиг. 5 - принципиальная схема блока управления следящего задатчика по второму варианту,; на фиг. 6 - структурная схема алгебраического блока; на фиг. 7 - график функциональной зависимостр степени открытия регулирующего клапана от величины уровня в мернике. Устройство содержит датчик 1 уровня в мернике 2 дозируемого реагента, первый элемент 3 памяти, первый элемент 4 сравнения, датчик 5 уровня в емкости 6 исходного реагента, блок 7 умножения, второй элемент 8 памяти, сут матор 9,, элемент ИЛИ 10 первьш и второй триггеры 11 и 12 пневмопереключатель 13. пневмокнопку 14, следящий зй,цатчик 15, рале 16 переключения, регулирующий клапан 1 датчик 18 качества исходного р еагент второй элемент 19 сравнения, задатчик 20. Выход датчика I уровня дозируемог реагента соединен с входом следящего задатчика 15, минусовой камерой первого элемента 4 сравнения и через пе вый элемент 3 памяти с плюсовой камерой сумматора 9, к минусовой камер которого подключены последовательно соединенные датчик 5 уровня исходног реагента, блок 7 умножения и второй элемент 8 памяти, выход сумматора 9 соединен с плюсовой камерой элемента 4 сравнения, выход которого через элемент ИЛИ 10 подключен к стирающему входу первого триггера 11, установочный вход которого соединен с пневмокнопкой 14, а выход через номально открытое сопло второго тригг а 12с управляющими камерами первого и второго элементов 3, 8 памяти реле 16 переключения, нормально открытое сопло которого соединено с атмосферой, а выход следящего заатчика 15 через номально закрытое сопло реле 16 переключения с выходным каналом на регулирующий клапан. Входы второго элемента 19 сравнения соединены с выходом датчика 18 качества исходного реагента и задатчиком 20, а выход - с установочным входом второго триггера 12, канал питания которого соединен с выходом пневмопереключателя 13, а выход - с вторым входом элемента ИЛИ 10. Следящий задатчик по первому варианту (фиг, 2) содержит следящий пневмопривод 21, на выходном штоке 22 которого установлен программный профиль 23 и выходной пневмопреобразователь 24. Следящий пневмопривод 21 состоит из трехходового клапана 25, щток золотника 26 которого соединен .с мембранной сборкой 27 мембранного блока 28. К полости 29 пневмоцилиндра 30 и нагрузочной полости 31 подключена полость клапана 25 и задатчик 32. В пневмоцилиндре 30 установлен поршень 33, а в блоке 28 - пружина 34. По второму варианту (фиг. 3) следящий задатчик содержит по числу линейных участков аппроксимируемой кривой заданной функции, общий вид которой представлен на графике, фиг. 4, задатчики уровней 35, пневмоконтакты 36, однотипные алгебраические блоки 37 и на единицу меньшее количество однотипных блоков управления 38. Первые входы блоков управления 39 соединены между собой, с вторыми входани алгебраических блоков 37 и с входом функционального преобразователя, второй вход блока управления 38 соединен с задатчиком уровня 35 одноименного порядкового номера и с вторым входом соответствукяцего алгебраического блока 37. Последний задатчик уровня 35 соединен с первым входом последнего алгебраического блока 37. Выходы алгебраических блоков 37 через пневмоконтакты 36 одно- i именных порядковых номеров соединены с выходом функционального преобразователя. Вторыми выходами предыдущих через третьи входы последующих блоки управления 38 последовательно со динены между собой, а третий вход первого блока управления 38 соединен с каналом питания. Первые выходы блоков управления 38 соединены с камерами управления пневмоконтактов 36 одноименных порядковых номеров, а второй выход последнего блока управления 38 соединен с камерой управления последне го пневмоконтакта 36. Блок управления следящего задатчика по второму варианту содержит (фиг. 5) элемент 39 сравнения, элемент НЕ 40 и элемент И 41. Плюсовая и минусовая камеры элемента 39 срав нения соединены соответственно с первым и вторым входом блока и через элемент НЕ 40 с первым входом элемента И 41, второй вход которого соединен с третьим входом блока, а выход - с выходом блока. Алгебраический блок (фиг. 6) содержит первьм дополнительный сумматор 42, блок 43 умножения, дополнительный задатчик 44 и второй дополнительный сумматор 45. Плюсовой вход дополнительного сумматора 42 соединен с первым входом блока, минусовой вход - с вторы входом блока, а выход через блок 43 умножения соединен с первым плюсовы входом сумматора 45, второй плюсовой вход которого соединен с задатч ком 44, а выход - с выходом блока. Устройство работает следующим образом. Пневмокнопкой 14 (фиг. 1) включа ется первый триггер 11, выходной единичный сигнал которого через нормально открытое сопло второго триггера 12 поступает в камеру упра ления реле 16 переключения, которое срабатывая, коммутирует выход следя- 45 щего задатчика 15 с выходом устройства. Этот сигнал, величина которого зависит от уровня дозируемой жидкости в мернике 2, поступает на регулирутощий клапан 17, который, открываясь,50 пропускает дозируемую жидкость в емкость 6. Одновременно выходной сигнал триггера 12 включает первьй и второй элементы 3 и 8 памяти, обеспечивая запоминание на их выходах 55 сигналов датчика и датчика 5 после блока 7 умножения в момент начала дозирования , Указанные сигналы поступают на сумматор 9 и на его выходе формируется сигнал, соответствующий заданной дозе дозируемой жидкости.. Сигнал датчика 1 уровня дозируемого реагента в мернике 2 поступает также на вход следящего задатчика 15, выходной сигнал которого, а соответственно и степень открытия регулирующего клапана 17 находятся в определенной функциональной зависимости от величины уровня в мернике 2 дозируемой жидкости, график которой в общем виде представлен на фиг. 7. В начале процесса дозирования, когда уровнь дозируемой жидкости в мернике 2 наибольший, степень открытия регулирующего клапана 17 минимальна. С уменьшением уровня жидкости в мернике 2 согласно заданной функциональной зависимости, отрабатываемой слеяеттам задатчиком 15, пропорционально возрастает его выходной сигнал, который соответственно увеличивает степень открытия регулирующего клапана 17 (фиг. 4 и 7), обеспечивая тем самым постоянство заданной величины расхода дозируемой жидкости в процессе дозирования. Процесс дозирования продолжается до момента достижения равенства текущего значения уровня дозируемой жидкости заданной дозе. В этот момент срабатывает первый элемент 4 сравнения и на выходе элемента ИЛИ 10 появляется сигнал, сбрасывающий первый триггер 11 на ноль, вследствие чего сигнал, поступающий в управляющую камеру реле 16 переключения, уменьшается до нулевого значения. В результате этого реле 16 переключения возвращается в исходное состояние, выход устройства через нормально открытое сопло реле 16 переключения соединяется с атмосферой. регулирующий клапан 17 эакрьшается и цикл дозирования завершается. Регулирующий клапан 17 закрывается также при достижении заданного качества исходного реагента, устанавливаемого задатчиком 20, в емкости 6. При этом срабатывает второй элемент 19 сравнения и единичный сигнал, проходя через нормально открытое сопло второго триггера 12 и элемент ИЛИ 10, сбрасывает на ноль первьй триггер 11, в результате чего регулирующий клапан 17 закрывается
аналогично вышеописанному и подача дозируемой жидкости прекращается.
Следящий задатчик по первому варианту (фиг. 2) работает следующим образом. Сигнал от датчика уровня дозируемого реагента поступает в мембранный блок 28, положение мембранной сборки 27 которого и соответственно штока золотника 26 трехходового клапана 25 зависит от величины входного сигнала. При уменьшении, например, входного сигнала мембранная сборка 27 мембранного блока 28 под действием пружины 34 обратной связи переместится влево совместно со штоком золотника 26 трехходового клапана 25. При этом часть воздуха из рабочей полости 29 пневмоцилиндра 30 через трехходовой клапан 25 выйдет в атмосферу и поршень 33 под давлением воздуха нагрузочной полости 31, поступающего от задатчика 32, переместится вправо. Перемещение поршня 33 со штоком 22 будет продолжаться до наступления равенства усилий, развивае1чых мембранной сборкой 27 и пружиной 34 обратной связи. Вместе с выход1яым штоком 22 следящего пневмопривода перемещается установленный на нем программньм профиль 23, взаимодействующий со штоком пневмопреобразователя 24, выходной сигнал которого увеличивается в соответствии с заданной функциональной зависимостью, определяемой рабочей поверхностью программного профиля 23, и обеспечивает увеличение степени открыти регулирующего клапана 17 (фиг. 7) в процессе дозирования, сопровояадающейся уменьшением уровня дозируемой жидкости.
Следящий задатчик по второму варианту (фиг. 3, 5 и 6) работает следующим образом. Сигнал от датчика уровня дозируемого реагента поступает через вторые входы алгебраических блоков 37 на минусовые входы первых сумматоров 42, на плю. совые входы которых через первые входы алгебраических блоков 37 поступают от задатчиков 35 сигналы, соответствующие абсциссам конечных точек линейных участков аппроксимируемой кривой заданной функции изменения выходного сигнала следящего задатчика в зависимости от величины уровня дозируемой жидкости (фиг. 4)
Первый сумматор 42 алгебраического блока 37 вырабатьгаает сигтшл, пропорциональный
(),
где Н- - сигнал текущего значения
уровня дозируемой жидкости; Н - сигнал, соответствующий абсциссе конца линейного участка аппроксимируемой , кривой.
Блок 43, выполняя функцию умножения этого сигнала на постоянный коэффициент К 5 численно равный тангенсу угла наклона данного линейного участка относительно оси абсцисс, вырабатывает сигнал, пропорциональный разности ординаты Р; точки i на данном линейном участке и ординаты Р конца линейного участка: (,-)К Р,-Р, которьш суммируется на втором сумматоре 45 со значением Р , поступающим от задатчика 44, в результате - чего на выходе соответствующего алгебраического блока 37 появляется сигнал Р- , соответствующий значению ординаты точки i на аппроксимированной кривой и зависящий от значения текущего значения уровня дозируемой жидкости.
Одновременно сигнал датчика уровня дозируемого реагента поступает через первые входы блоков управления 38 в плюсовые камеры элементов 39 сравнения, в минусовые камеры которых через вторые входы блоков управления 38 поступают сигналы от задатчиков 35.
Пусть, например, значению текущего уровня Н, дозируемой жидкости соответствуют точка i на линейном участке 2-3 аппроксимируемой кривой. Так как Н Hj, . Н Н , на выходе элементов 39 сравнения первого и второго по порядку блоков 38 управления появляются единичные сигналы, а остальных - нулевые.
Указанные сигналы поступают на вторые выходы блоков 38 управления и через третьи входы последукмцих блоков 38 управления на вторые вхо- . ды элементов И 41. Одновременно сигналы, проходя через элементы НЕ 40, поступают инвертированными на первые входы элементов И 41 собственных блоков 38 управления. Тогда на входы элементов И 41 всех блоков 38 управления поступают пары сигналов О и 1, за исключением третьего по
порядку блока 38 управления, на входы элемента И 41 которого поступают 1 и 1, вследствие чего он срабатьшает и на его выходе появляется единичный командный сигнал, который через первый выход третьего пневмоконтакта 36, который срабатывает, коммутирует выход третьего алгебраического блока 37, равный Р,- , с выходом следящего задатчика.
Аналогично происходит работа следящего задатчика по второму варианту при других значениях уровня дозируемой жидкости, за исключением тех значений, которые соответствуют последнему линейному участку аппроксимируемой кривой (от Н до Н| на фиг. 4). В этом случае на втором выходе последнего блока 38 управления появляется единичный командный сигнал, от Которого срабатывает последний пневмоконтакт 36, коммутируя выход последнего алгебраического блока 37 с выходом следящего задатчика.
Таким образом, в зависимости от значения текущего уровня дозируемого реагента один из блоков 38 управле- . НИН вырабатывает командный сигнал, от которого срабатьшает соответствую щий пневмоконтакт 36, пропуская на выход следящего задатчика выработанный соответствующим алгебраическим блоком 37 сигнал, величина которого находится в заданной функциональной зависимости от величины уровня дозируемой жидкости.
Формула изобретения
1.Пневматическое устройство для управления процессом дозирования по авт. св. № 890639, отличающееся тем, что, с целью стабилизации расхода жидкости, в нем установлены реле переключения и следящий задатчик, вход которого соединен
с выходом датчика уровня дозируемого реагента, а выход через нормально закрытое сопло репе переключения с выходным каналом на регулирующий клапан, нормально открытое сопло реле переключения соединено с атмосферой, а камера управления его через нормально открытое сопло второго триггера с выходом первого триггера.
2.Уcfpoйcтвo по П.1, отличающееся тем, что, следящий задатчик выполнен в виде функционального преобразователя.
3.Устройство по п.2, о т л-и чающееся тем, что функциональный преобразователь содержит слдящий пневмопривод, на выходном штоке которого установлен программный профиль, связанный со штоком выходного пневмопреобразователя.
4.Устройство по п.2, отличающееся тем, что, функциональный преобразователь содержит по числу линейных участков аппроксимируемой кривой заданной функции задатчики уровней, пневмоконтакты, однотипные алгебраические блоки и на единицу меньшее количество однотипных блоков управления, первый выход каждого из которых соединен с камерой управления одноименного порядкового номера пневмоконтакта, певые входы блоков управления соединены между собой, с вторыми входами алгебраических блоков и с входом функционального преобразователя, втрой вход каждого блока управления соединен с задатчиком уровня одноименного порядкового номера и первым входом одноименного порядкового номера алгебраического блока, выход кторого через пневмоконтакт одноименного порядкового номера соединен с выходом функционального преобразователя, последний задатчик уровня соединен с первым входом последнего алгебраического блока, вторыми выходами предьщущих через третьи входы последующих блоки управления последовательно соединены между собой, второй выход последнего блока управления соединен с камерой управления последнего пневмоконтакта, а третий вход первого блока управления - с каналом питания.
5.Устройство по п.4, отличающееся тем, что блок управления содержит третий элемент сравнения, плюсовая камера которого соединена с первым входом блока, минусовая - с вторым входом блока, а выход соединен с вторым выходом блока и через элементы НЕ с первым входом элемента И, второй вход которого соединен с третьим входом блока, а выход - с первьм выходом блока.
6.Устройство по п.4, отличающееся тем, что, алгебра9127075310
ический блок содержит первый допол- соединен с первым плюсовым входом нительный сумматор, плюсовой вход , второго дополнительного сумматора, которого соединен с первым входом второй плюсовой вход которого соедиблока, минусовой - с вторым входом иен с дополнительным задатчиком, а блока, а выход через блок умножения 5 выход - с выходом блока.
f odfTOfj 30 W if ffa
фи8.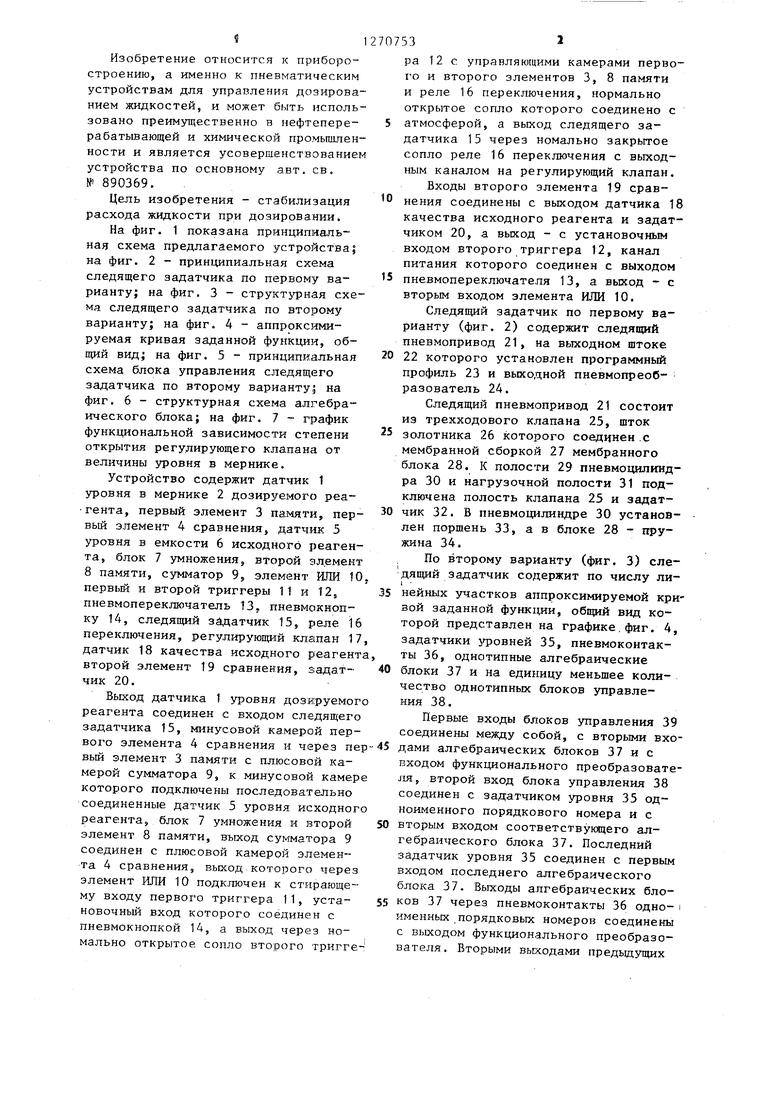
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство для управления процессом дозирования | 1980 |
|
SU890369A1 |
| Пневматическое устройство для управления процессом дозирования | 1983 |
|
SU1095141A1 |
| Устройство для автоматического регулирования концентрации растворов | 1980 |
|
SU935885A1 |
| Пневматическое устройство для управления процессом дозирования | 1981 |
|
SU1010597A1 |
| Устройство для управления процессом дозирования | 1976 |
|
SU628468A1 |
| Регулятор расхода жидкости | 1986 |
|
SU1357924A1 |
| Система автоматического управления работой дозатора | 1990 |
|
SU1747309A1 |
| Устройство для контроля пневматических приборов | 1977 |
|
SU645024A1 |
| Устройство для автоматического управления режимом работы химических реакторов | 1981 |
|
SU955999A1 |
| Устройство для программного регули-РОВАНия ТЕМпЕРАТуРы эКСТРАКТОРА | 1979 |
|
SU809105A1 |
Фи9. б
| Пневматическое устройство для управления процессом дозирования | 1980 |
|
SU890369A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
