Изобретение относится к машиностроению и может быть использовано при передаче вращения в одном направлении при высоких требованиях к жесткости механизма и больших нагрузках.
Целью изобретения является расширение эксплуатационных возможностей путем регулирования усилия фрикционного сцепления гибкого кольца и обоймы.
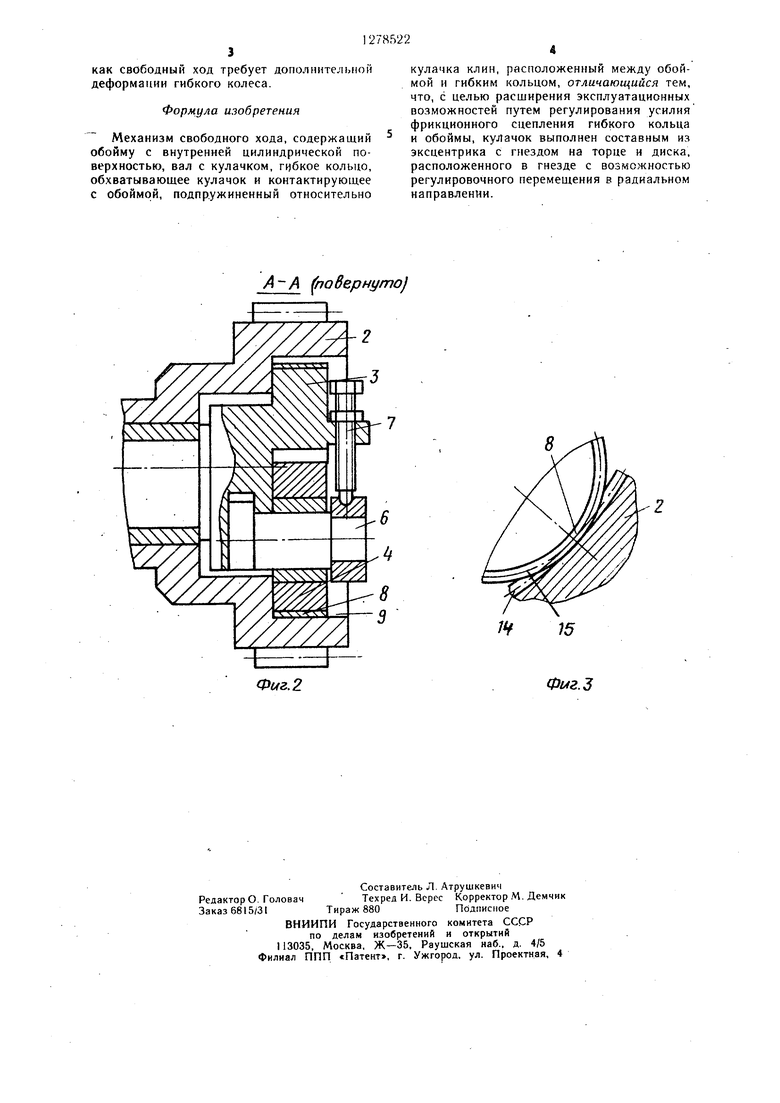
На фиг. I показан механизм свободного хода; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вариант выполнения соединения гибкого кольца с обоймой.
Механизм состоит из ведущего кулачка 1 и ведомой обоймы 2. Ведущий кулачок выполнен составным и состоит из эксцентрика 3 и диска 4. расположенного в гнезде 5 на торце эксцентрика. Диск 4 установлен на пальце 6, находящемся в радиальном пазу эксцентрика 3 и имеющем возможность перемещения в радиальном направлении с помощью болта 7. На кулачок 1 надето гибкое кольцо 8, которое прижато к внутренней цилиндрической поверхности 9 обоймы с помощью диска 4. В клиновую полость 10 между гибким кольцом 8 и ведомой обоймой 2 помещен клин 11, который прижат к контактным поверхностям обоймы и гибкого кольца с помощью пружины 12, которая упирается в упор 13, закрепленный на кулачке I.
На поверхности 9 может быть выполнен зубчатый конец 14, который входит в зацепление с зубчатым венцом 15 гибкого кольца 8.
Механизм работает следующим образом.
При вращении кулачка 1 в сторону, противоположную заклиниванию (на фиг. 1 по часовой стрелке), вместе с кулачком 1 совершают вращательное движение гибкое кольцо 8, упор 13, который через пружину 12 постоянно подталкивает клин 11 в освобождающуюся клиновую полость Ю, поддерживая постоянный контакт клина с контакт- ными поверхностями гибкого кольца 8 и ведомой обоймы 2. За счет фрикционного контакта гибкого кольца 8, обоймы 2 и диска 4 последний совершает вращательное относительное движение в противоположную сторону по отношенню к движению кулачка 1. При отсутствии проскальзывания в зоне фрикционного контакта кольцо 8 совершает дополнительное относительное движение за счет деформации и вращение на ведомую обойму не передается, наблюдается фаза свободного движения.
При движении кулачка I в противоположном направлении (на фиг. I против часовой стрелки) вместе с ним совершают движения диск 4 и гибкое кольцо 8. Клин 1I распирается между контактной поверхностью ведомой обоймы 2 и гибким кольцом 8. ибкое кольцо, прижатое к поверх1гости ве
5
0
о 5
0
5
0
5
5
0
домой обоймы 2, начинает совершать движение за счет возможности деформации относительно кулачка 1, но в противоположную сторону, поэтому на поверхности клина реализовано сложное движение, при котором снижается величина тангенциальной составляющей вращательного движения и, таким образом, создаются условия фрикционного контакта на поверхностях клина, за счет чего и происходит заклинивание, а подобранная оптимальным образом поверхность кулачка 1 приводит к оптимальной нагру- женности клина при передаче рабочего момента.
При необходимости ограничения передаваемого момента величина поджатия диска 4с помощью болта 7 может быть изменена за счет чего изменяется величина предельного момента реализуемого с помощью фрикционного контакта гибкого кольцо 8 и ведомой обоймы 2.
Механизм (фиг. 3) работает аналогично, но вместо фрикционного контакта используют зубчатое зацепление, которое позволяет передавать нормальными силами более значительные рабочие моменты при отсутствии проскальзывания. В этом случае диск 4 создает требуемую деформацию гибкого кольца для сохранения параметров зацеп- ления. У такого механизма при его работе нет возможности ограничения передаваемого момента.
Механизм свободного хода указанной конструкции позволяет повысить надежность работы и расширить эксплуатационные возможности за счет возможностей профилирования поверхности кулачка и надежной реализации рабочих условий фрикционного контакта непосредственно на поверхности клина. Установка гибкого кольца позволяет снизить инерционные нагрузки, а кроме того, увеличение контактной площадки позволяет снизить концентрацию напряжений от действия весьма значительных нормальных сил. Расширение эксплуатационных возможностей, кроме того, стало возможным за счет перенастройки предельного момента проскальзывания гибкого кольца, создающего за счет относительного движения фрикционные условия контакта клина, кулачка и обоймы. Ликвидация этих условий, т. е. проскальзывание гибкого колеса, приводит к незаклиниванию механизма, следовательно, к ограничению рабочего момента.
Механизм достаточно прост в изготовлении.
Рациональным является его использование там, где работа ограничена достаточно низкими скоростями, а кроме того, основная рабочая фаза, занимающая наибольшее время в процентах от общего времени работы, - фазу включенного состояния, так
как свободный ход требует дополнительной деформации гибкого колеса.
Формула изобретения
Механизм свободного хода, содержащий обойму с внутренней цилиндрической поверхностью, вал с кулачком, гибкое кольцо, обхватывающее кулачок и контактирующее с обоймой, подпружиненный относительно
А-А повернуто)
кулачка клин, расположенный между обоймой и гибким кольцом, отличающийся тем, что, с целью расщнрения эксплуатационных возможностей путем регулирования усилия фрикционного сцепления гибкого кольца и обоймы, кулачок выполнен составным из эксцентрика с гнездом на торце и диска, расположенного в гнезде с возможностью регулировочного перемещения в радиальном направлении.
Фиг. 2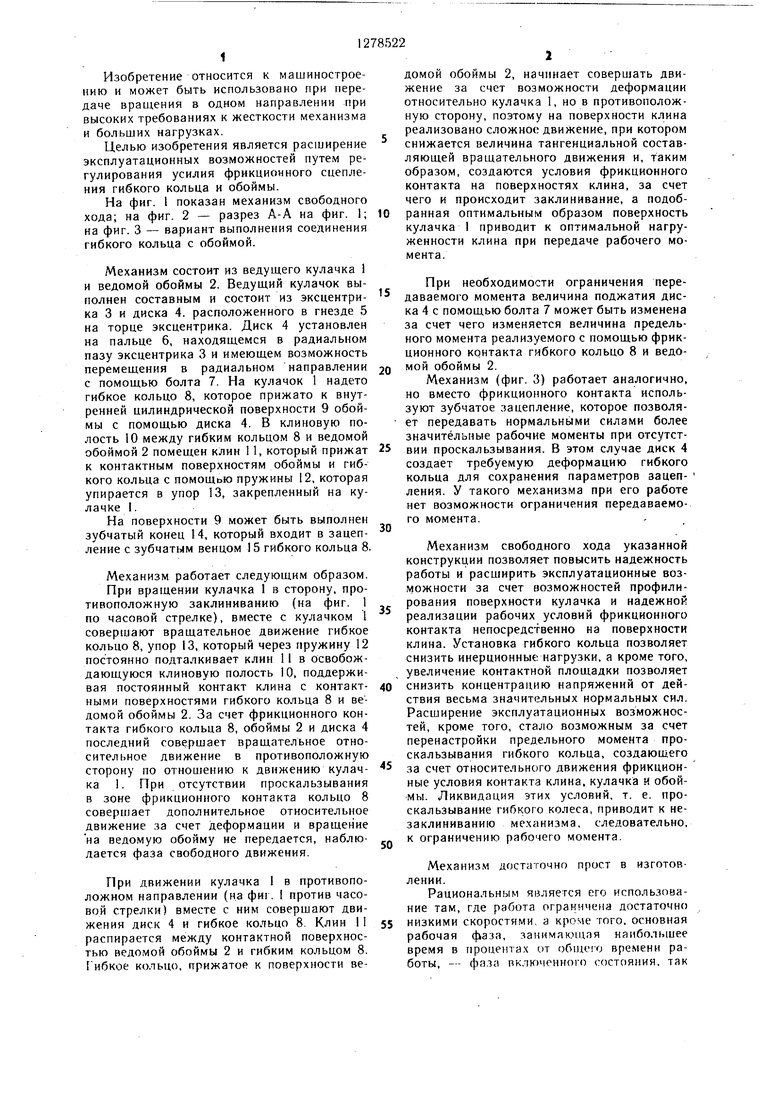
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНАЯ МАШИНА ДЛЯ ЧИСТКИ ТРУБОПРОВОДОВ | 1999 |
|
RU2145528C1 |
| ПЕРЕДАЧА СО СВОБОДНОЙ ОБОЙМОЙ | 2006 |
|
RU2327068C1 |
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ ИЛИ ДЛЯ ПРОХОДКИ ТУННЕЛЕЙ | 2003 |
|
RU2290509C2 |
| ПЕРЕДАЧА С ПРОМЕЖУТОЧНЫМИ РОЛИКОВЫМИ ЗВЕНЬЯМИ | 2006 |
|
RU2323378C2 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1999 |
|
RU2156897C1 |
| Эксцентриковая муфта свободного хода | 1990 |
|
SU1754972A1 |
| Фрикционная предохранительная муфта | 1981 |
|
SU1040241A1 |
| СООСНАЯ ПЕРЕДАЧА С ПРОМЕЖУТОЧНЫМИ ЗВЕНЬЯМИ | 2003 |
|
RU2241879C1 |
| Клиновой механизм свободного хода | 1981 |
|
SU966354A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
Изобретение относится к машиностроению и может применяться для обеспечения передачи вращения в одном направлении. Целью изобретения является расширение эксплуатационных возможностей путем регулирования усилия фрикционного сцепления гибкого кольца и обоймы. Механизм свободного хода содержит обойму 2, внутри которой расположен кулачок 1. Кулачок состоит из эксцентрика 3 и диска 4, установленного Б гнезде 5 на эксцентрике. На кулачке расположено гибкое кольцо 8, прижатое диском к обойме. В клиновой полости установлен подпружиненный относительно кулачка клин 11, взаимодействующий с гибким кольцом и обоймой. На контактных поверхностях обоймы и гибкого кольца могут быть выполнены зубья. Перемещением диска 4 в радиальном направлении обеспечивается регулировка усилия сцепления. При вращении кулачка клин 11 заклинивается между обоймой 2 и гибким кольцом 8. 3 ил. с S 73 to 00 сд ГчЭ ю
| Клиновой механизм свободного хода | 1974 |
|
SU497431A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Клиновой механизм свободного хода | 1982 |
|
SU1057714A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
