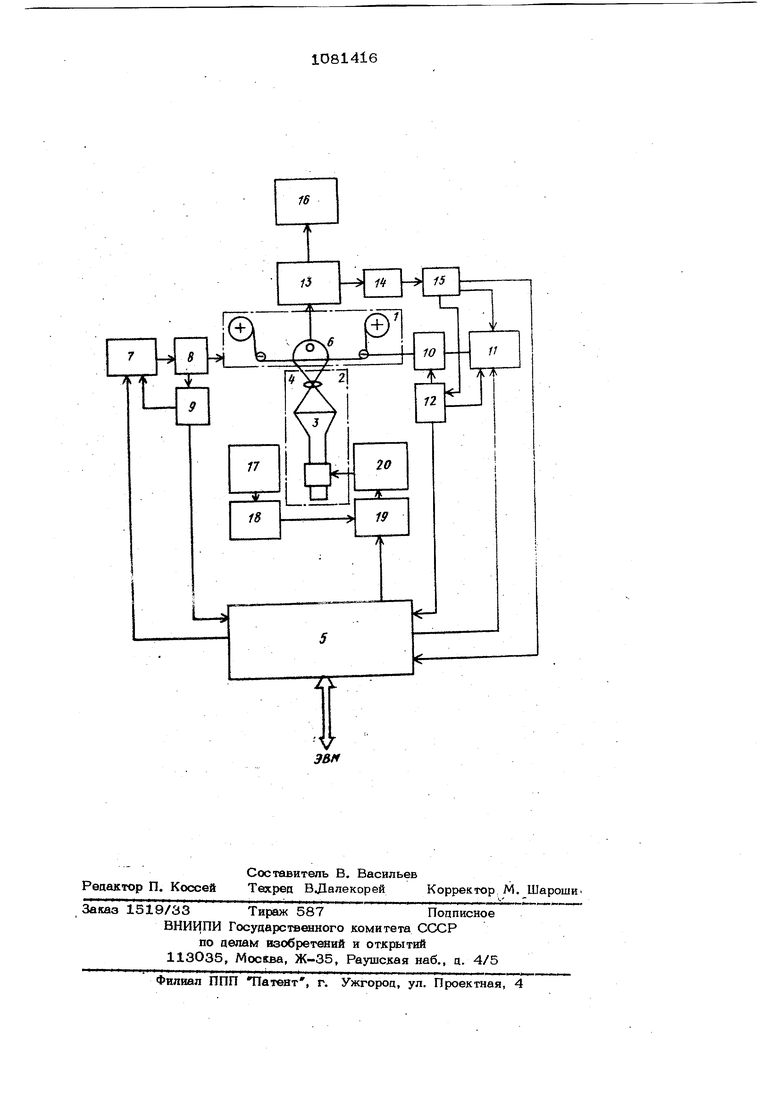
Изобретение относится к. фoтoгpaммelv рии, а точнее к устройствам цля комплексного дешифрирования аэроиэображений, и может быть использовано в автоматизированных системах цешифрирования Известно устройство для комплексного цетиифрирования аэроизображения, соиержащее блоки считьшания изображений г-яя опновременной обработки и отобр 1же яия на экране виаеоконтрольного устройстза изображений с нескольких фильмов, полученных съемочными системами с разг личными законами построения изображений и различными значениями элементов, .внешнего и внутреннего ориентиррвания(;1 К недостаткам данного устройства относятся трудоемкость и увеличение времени обработки, связанные с необходимостью предварительного визуального поиска одноименных точек изображения местности на разных аэрофильмах и ручного ориентирования и масштабиро- вания каждого изображения. Все это обусловлено недостатками блоков считывания в данном устройстве. Наиболее близким к изобретению по технической сущности и конструктивному решению является устройство считывания снимков, содержащее лентопротяжный механизм с управляемым приводом и датчиком продольного перемещения, электронную оптическую систему в виде последовательно связанных синхрогенерагора, генератора пилообразных импульсов кадровой и строяной разверток, преобразователя и усилителя разверток, ЭЛТ, объектива, свето- (фото) приемника видео усилителя, один выход которого подключен к ВКУ, а другой - к блоку считывания навигационных данных с цифроаналоговым преобразователем С 2. Недостатком известного устройства является необходимость предварительного визуального поиска одноименных точек изображения местности, ручного ориентирования и масштабирования каждого изображ«1ия при работе с несколькими фильмами. Целью изобретения является сокраще .j.u« пс 1лс1ч,л t;vf ijamc- ние времени обработки нескольких фильмов при комплексном дешифрировании путем автоматизации поиска изображений одноименных точек местности, ориентирования и масштабирования. Поетавлеяная цепь достигается тем, что устройство для считывгшия изображения со снимков, содержащее лентопротяжный механизм с последовательно соеди1016 ненными датчиком перемотки, бл.АОм управления и приводом продольного перемещения фильма, а также электронную оптическую систему в виде последова ель но связанных синхрогенерагора, генератора пилообразных импульсов кадровой и строчной разверток, преобразователя и усилителя разверток, электронно-лучевой трубки, объектива, светоприемника и видеоусилителя, один выход которого подключен к видеоконтрольному устройству, а другой - к блоку считывания на. вигационных данных, причем датчик перемотки соединен с приводом продольного I перемещения, снабжено последовательно соединенными датчиком поперечного пе ремещения, блоком управления и привода Поперечного перемещения, блоком контроля считывания навигационных данных и блоком обмена, связанным с ЭВМ, при этом привод поперечного перемещения соединен с датчиком поперечного перемещения и лентопротяжным механизмом, блок контроля считывания навигационных данных подключен на выход блока считывания и одним своим выходом связан с Еходом датчика перемотки,другим вькодом соединен с первым входом блока управления привода перемотки, а третьим выходом подключен к одному из входов блока обмена, два других входа которого подключены к первым выходам датчиков перемотки и поперечного перемещения, вто1л 1е выходы которых соединены соот ветственно с вторым входом блока управления перемотки и первым входом блока управления поперечным перемещением, а выходы блока обмена соединены соответственно с третьим входом блока управления перемотки, вторым входом блока управления поперечным перемещением и вторым входом преобразователя разверток. На чертеже представлена схема устройства. Устройство считывания изображений состоит из лентопротяжного механизма 1, узла 2 и электронно-лучевой трубки 3, объектива 4, блока 5 обмена, светопри- емника 6, блока 7 управления поперечным емника О, олока V ynpaBj перемещет ием, привода 8 оперечного еремещения, датчика 9 поперечного перемещения, привода 10 продольного пере мещения (перемотки фильма), блока 11 правления перемотки, датчика 12 переотки, видеоусилителя 13, блока 14 счиывания навигационных данных, блока 5 контроля считывания навигационных аннъос, видеоконтрольного устройства 16, синхрегенератора 17, генератора 1 пилообразных напряжений кадровой и строчной разверток, преобразователя 19 разверток, усилителя 2О разверток. Устройство работает следующим образом. Обрабатываемые фильмы заряжаются в лентопротяжный механизм. Затем через блок 5 обмена от ЭВМ поступает команда на поперечное перемещение лентопротяжного механизма относител1 но растра на экране ЭЛТ 3 с целью пр ектирования растра на периферийную зону, в которой располагаются кодограм мы навигационных данных подлежащего обработке в текущий момент времени фильма. Кодограмма представляет собой сери непрозрачных и прозрачных полос (меток), соответствукяцих О и 1 значений двоичного кода параметров нави ihauHOHHbix данных. Каждый кадр фильма сопровождается индивидуальной кодограммой навигационных данных. Размах и постоянство смещения сигналов разверток X и У, а также поперечное положение лентопротяжного механизма 1, при котором происходит проектирование растра на экране ЭЛТ 3 на кодограмму обеспечивается за счет преобразователя разверток 19, на вход которого поступают пилообразные напряжения кадровой и строчной разверток от генератора 18 разверток, запускаемого синхрогенератором 17, а также за счет поперечного перемещения лентопротяжного механизма 1 в положение, соответствующее считыванию кодограмм навигационных данных заданного фильма. Поперечное перемещение осуществляе ся следукицим образом. Величина поперечного перемещения X , содержашася в команде, поступивщей от ЭВМ, передается блоком 5 обмена в блок 7 упра ления поперечным перемещением. По поступлении команды блок 7 запускает двигатель (не показан) привода поперечного перемещения 8, осуществляющего поперечное перемещение лентопротяжного механизма 1. Одновременно с п&ремещением в механизме 8 привода вырабатывается последовательность импуль сов, пропорциональная величине текущего перемещения, которые поступают на вход датчика 9 поперечного перемвдени который осуществляет подсчет числа поступивщих импульсов, накапливая значение текущей координаты лентопротяж- ного механизма в поперечном направлении. Затем указанная последовательность импульсов поступает в блок 7, где осуществляется их вычитание из величины заданного перемещения X. В процессе пвреь1ещения в блоке 7 ос осуществляется сравнение значения X с нулем. Прекращение перемещения осуществляется при равенстве нулю величич ны X, что соответствует отработке ко- манды на выполнение поперечного перемещения, лентопротяжного механизма 1 в заданную точку вдоль поперечной оси. Затем следует поиск кадра фильма, содержащего изображение участка местности с центром, соответствующим заданным .для поиска, географическим коор динатам. Значения заданных координат центра интересующей зоны заранее заво дятся в память ЭВМ. Поиск кадра осуществляется после пос.тупления от ЭВМ в блок 5 обмена команды продольного перемещения. Ко-.. манда продольного перемещения перждается блоком 5 обмена блоку 11 управле ния продольным перемещением. По поступлении команды блок 11 запускает двигатель (не показан) привода продольного перемещения (перемотки) фильма. В процессе перемотки фильма блоком 14 считывания навигационных данных осуществляется считывание значш1ий навигационной информации, которая проверяется блоком 15 контроля считыванра навигационной информации. Затем навигационная информация через блок 5 обмена передается в ЭВМ, где определяется наличие на текущем кадре фильма изображения искомой местности путем сравнения значений заданных для поиска координат центра заданной зоны с географическими координатами, соответствующими центру текущего кадра, зафиксированными в навигационных данных с учетом величины захвата на местности кадром. В момент определения наличия изображения интересующей области на текущем кадре ЭВМ вырабатывает команду прекращения продольного перемещения, которая поступает через блок 5 обмена на на блок 11. По получении этой команды блок 11 вьшолняет остановку двигателя. В процессе продольного перемещения в механизме привода 1О вырабатывается t последовательность импульсов, пропорциО нальная величине продольного перемещения фильма, которая поступает на вход. датчика 12 продольного перемещения. который осушествляет подсчет числа по ступивших импульсов, накапливая величин текушвй координаты лентопротяжного механизма 1 в продольном направлении (вполь фильма). Подсчет величины текущего продольного перемещения осуществляется всег да от напала каждого кадра, определяем мого расположением кодограммы навигационных данных. В момент считывания последней метки кодограммы (соответсч вугошей началу системы координат кадра) блок 15 контроля считывания вырабатывает сигнал установки в ноль датчика 12 продольного перемещения. Текущее положение центра pactpa ЭЛТ 3 относительно фильма определяеч ся текущими значениями продольного и поперечного перемещения X, У, которые иа датчиков продольного 22 и поперечного 9 перемещения через блок 5 обмен передаются в ЭВМ, где рассчитывается величина необходимого перемещения лентешротяжного механизма 1 для совме щения центра растра ЭЛТ 3 с интер&сующей точкой кадра, а также определяется необходимая величина разворота изображения X и масщтаб М , в кото- 10 166 ром необходимо отобразить информацию на экране ВКУ 16. На основе перечисленных расчетов ЭВМ формирует и выдает в блок 5 обмена команду, содержащую данные о величинах продольного X и поперечного У перемещения, которые передаются для исполнения в блоках 11 и 7 соо- ветственно, которые при помощи приводов и датчиков перемещения обеспечивают отработку перемещения центра растра ЭЛТ 3 в соответствующую заданной точку кадра. Величины угла ориентации и масщтаба отображения М соответственно поступают на вхоц преобразователя 19 разверток, который обеспечивает заданную величину и ориентацию растра на ЭЛТ 3. Считываемое таким образом изображе- ние окрестности заданной точки кадра через светоприемник 6 и видеоусилитель 13 передается на видеоконтрольное усрройство 16. Изобретение обеспечивает сокращение времени поиска изображений одноименных точек на разных фильмах и их комплексного дешифрирования ориентировочно на 30%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для трансформирования снимков | 1979 |
|
SU859814A1 |
| Устройство для трансформирования снимков | 1981 |
|
SU1016673A1 |
| Устройство для определения координат точек по аэроснимкам | 1985 |
|
SU1278579A1 |
| Устройство для считывания кодограмм | 1977 |
|
SU736136A1 |
| Устройство для дешифрирования аэроизображений с определением координат объектов | 1974 |
|
SU505879A1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Устройство для трансформирования снимков | 1976 |
|
SU661237A1 |
| АНАЛИТИЧЕСКИЙ ФОТОКАРТОГРАФ ДЛЯ СОСТАВЛЕНИЯ ФОТОКАРТ ПО СТЕРЕОСКОПИЧЕСКИМ СНИМКАМ | 1970 |
|
SU285256A1 |
| Устройство для отображения информации на экране цветной электронно- лучевой трубки | 1977 |
|
SU731446A2 |
| Система для обработки фильмовой информации | 1978 |
|
SU734702A1 |
УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ СО СНИМКОВ, содержащее лентопротяжный механизм, с последовательно соединенными датчиком перемотки, блоком, управления и приводом продольного перемещения фильма, а также электронную оптическую систему в виде . последовательно связанных синхрогвне(атора, генератора пилообразных импульсов кадровой и строчной разверток, преобразователя и усилителя разверток, элек- ронно-лучевой трубки, объектива, свето- приемника и видеоусилителя, один выход которого подключен к видеоконтрольному устройству, а другой - к блоку считывания навигационных данных, причем датчик перемотки соединен с приводом продольн(го перемещения, о тличающееся тем, что, с целью сокращения времени обработки фильмов при комплексном дешифрировании путем автоматизации поиска изображений одноименных точек естности, ориентирования и масштабирования изображений, оно снабжено последователь до соединенными датчиком поперечного перемещения,блоком управления и привода поперечного перемещения,блоком контроля считывания навигационных данных и блоком обмена, связанным с ЭВМ, при этом привод поперечного перемвиения со единен с датчиком поперечного перв«1шцения и лентопротяжным механизмом, блок контроля считывания навигационных данных подключен на выход блока считьюания к одним СВОИМ ВЫХОДОМ связан с входом датчика перемотки, другим выходом динен с первым входом блока управления привода перемотки, а третьим выходом подключен к одному из входов блока обмена, два других входа которого поокЛк чены к первым выходам па танков переморки и поперечного перемеш@1ия, вторые О выходы которых соединены соответственно эо i э с вторым ВХОДОМ блока управл ия пере мотки и первым входом блока yпpaвлeнkя Поперечным перемещением, а выходы блока обмена соединены соответственно (с третьим ВХОДОМ блока управления п&ремотки, Ьторым входом блока управле , ния поперечным перемещением и вторым ВХОДОМ преобразователя разверток.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР №,458708, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для трансформирования снимков | 1979 |
|
SU859814A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
