Изобретение относится к электротехнике, в частности к преобразовательной технике, и может быть исполь зовано для управления однофазным автономным инвертором.
Цель изобретения - уменьшение передаваемой инвертором в нагрузку реактивной мощности путем повышения точности стабилизации предоставляемого времени выключения тиристоров инвертора.
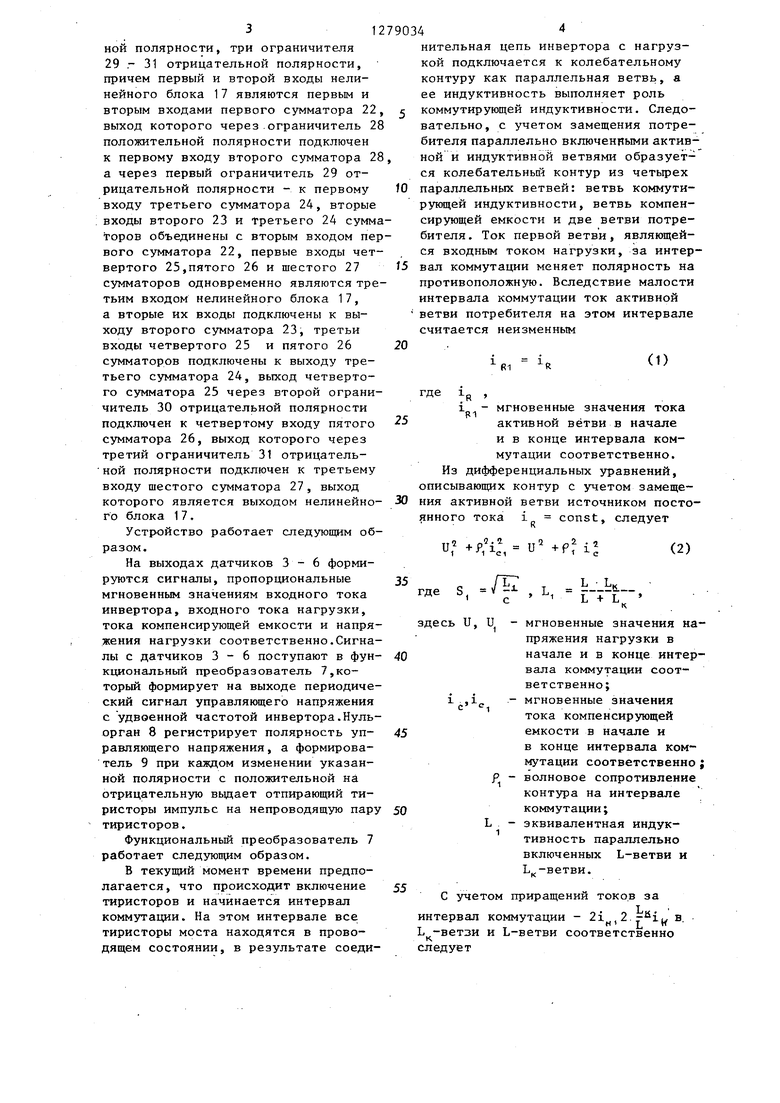
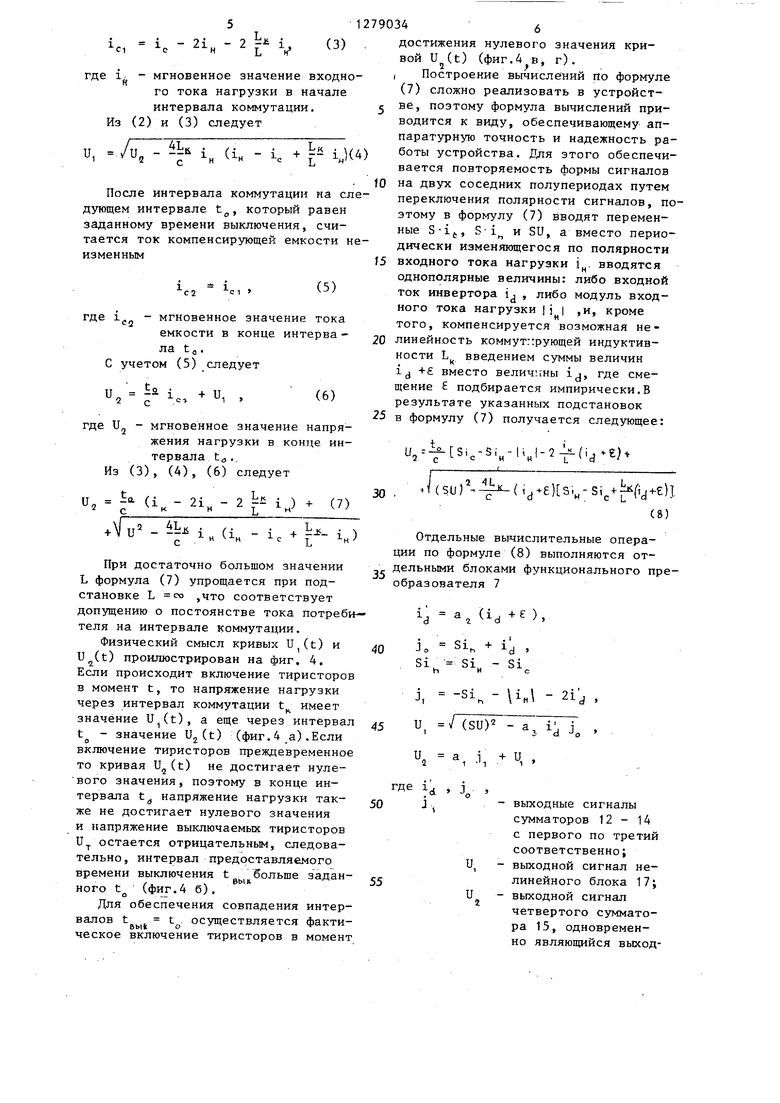
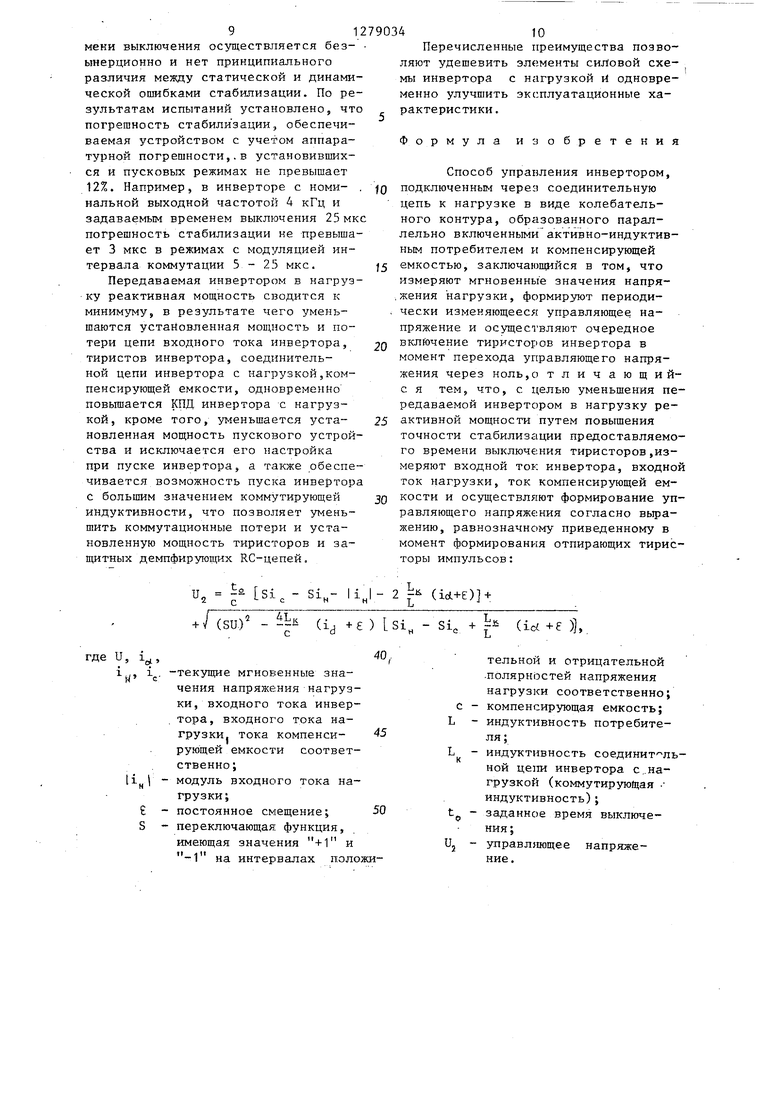
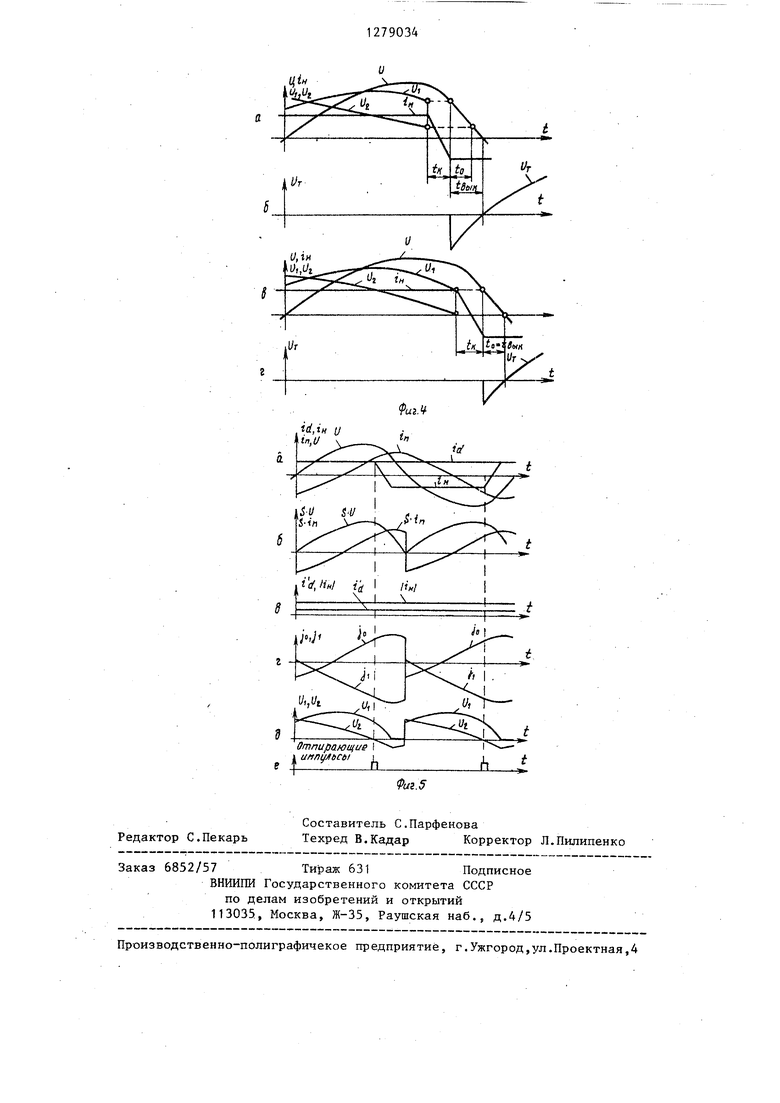
На фиг.1 показаны силовая схема инвертора с нагрузкой и структурная схема устройства, реализующего способ управления инвертором для стабилизации предоставляемого времени выключения тиристоров; на фиг.2 - функциональная схема функционального преобразователя, выполненного в виде формирователя прогнозируемых мгновенных значений напряжения нагрузки; на фиг.З - функциональная схема варианта выполнения нелинейного блока, входящего в состав функционального .преобразователя и выполненного с использованием принципа кусочно-ли- нейиой аппроксимации; на фиг.4 - временная диаграмма, поясняющая принцип действия устройства; на фиг.З - временная диаграмма основных контрольных сигналов устройства.
Устройство, реализующее способ управления инвертором для стабилизации предоставляемого времени выключения тиристоров инвертора 1 с нагрузкой 2 в виде колебательного контура образованного параллельно включенными активно-индуктивными потребителем и компенсирующей емкостью, содержит первый датчик 3 входного тока инвертора, второй датчик 4 входного тока нагрузки, третий датчик 5 тока компенсирующей емкости, четвертьй датчик 6 напряжения нагрузки,функциональный преобразователь 7,нуль- орган 8, формирователь 9 отпирающих тиристоры импульсов, причем функциональный преобразователь 7 подклю- чен входами к датчикам 3 - 6, а выходы - через нуль-орган 8 к формирователю 9 отпирающих тиристоры импульсов.
Функциональный преобразователь . 7 выполнен в виде формирователя прогнозируемого мгновенного значения напряжения и содержит блок 10 модуля, переключатель 11 полярности четыре сумматора 12 - 15, источник
16 смещения, нелинейный блок 17, причем входами функционального преобразователя 7 с первого пб четвертый являются выходы датчиков 3-6
с первого по четвертый соответственно, первый вход функционального преобразователя 7 является первым входом первого сумматора 12, второй вход функционального преобразователя
7 является входом блока 10 модуля, третий и четвертый входы функционального преобразователя являются первым и вторым входами переключателя 11 полярности соответственно, источник 16 смещения подключен к второму входу первого сумматора 12, выход которого подключен к первым входам второго сумматора 13, третьего сумматора 14 и нелинейного блока 17, первь й выход переключателя 11 полярности подключен к вторым входам второго 13 и третье- го 14 сумматоров, выход блока 10 модуля подключен к третьему входу третьего сумматора 14, выход второго сумматора 13 подключен к второму входу блока 17, третий вход которого подключен к второму выходу переключателя- 11, выход блока 17 подключен к первому входу сумматора 15, второй вход преобразователя 7 одновременно является третьим входом переключателя 11, третий вход которого подключен к третьему входу сумматора 13 и одновременно к четвертому входу сумматора 14, выход четвертого сумматора 15 является выходом функционального преобразователя 7, нелинейный блок 17 содержит перемножитель 18, квадратор 19, сумматор 20 и блок 21 извлечения корня, причем первый и второй входы нелинейного блока 17 являются первым и вторым входами перемножителя 18, третий вход нелинейного блока 17 является входом квадратора 19, выход которого подключен к первому входу сумматора 20, второй вход которого подключен к выходу перемножителя 18, выход сумматора 2б
подключен к входу блока 21 извлечения корня, выход которого является выходом нелинейного блока 17.
. Возможен вариант выполнения нелинейного блока 17 с использованием
принципа кусочно-линейной аппроксимации. В этом варианте нелинейный блок 17 содержит шесть сумматоров 22 - 27, ограничитель 28 положитель
ной полярности, три ограничителя 29 .- 31 отрицательной полярности, причем первый и второй входы нелинейного блока 17 являются первым и вторым входами первого сумматора 22, выход которого через.ограничитель 28 положительной полярности подключен к первому входу второго сумматора 28 а через первый ограничитель 29 отрицательной полярности - к первому входу третьего сумматора 24, вторые входы второго 23 и третьего 24 сумматоров объединены с вторым входом первого сумматора 22, первые входы четвертого 25,пятого 26 и шестого 27 сумматоров одновременно являются третьим входом нелинейного блока 17, а вторые их входы подключены к вы- ходу второго сумматора 23, третьи входы четвертого 25 и пятого 26 сумматоров подключены к выходу третьего сумматора 24, выход четвертого сумматора 25 через второй ограничитель 30 отрицательной полярности
подключен к четвертому входу пятого
сумматора 26, выход которого через третий ограничитель 31 отрицатель- ной полярности подключен к третьему входу шестого сумматора 27, выход которого является выходом нелинейно- го блока 17.
Устройство работает следуюпщм образом.
На выходах датчиков 3-6 формируются сигналы, пропорциональные мгновенным значениям входного тока инвертора, входного тока нагрузки, тока компенсирующей емкости и напряжения нагрузки соответственно.Сигналы с датчиков 3-6 поступают в фун- кциональный преобразователь 7,который формирует на выходе периодический сигнал управляющего напряжения с удвоенной частотой инвертора.Нуль- орган 8 регистрирует полярность уп- равпяющего напряжения, а формирователь 9 при каждом изменении указанной полярности с положительной на отрицательную вьщает отпирающий тиристоры импульс на непроводящую пару тиристоров.
Функциональньш преобразователь 7 работает следующим образом.
В текущий момент времени предполагается, что происходит включение тиристоров и начинается интервал коммутации. На этом интервале все: тиристоры моста находятся в проводящем состоянии, в результате соединительная цепь инвертора с нагрузкой подключается к колебательному контуру как параллельная ветвь, а ее индуктивность выполняет роль коммутирующей индуктивности. Следовательно, с учетом замещения потребителя параллельно включенными активной и индуктивной ветвями образуется колебательньй контур из четырех параллельньпс ветвей: ветвь коммутирующей индуктивности, ветвь компенсирующей емкости и две ветви потребителя. Ток первой ветви, являющейся входным током нагрузки, за интервал коммутации меняет полярность на противоположную. Вследствие малости интервала коммутации ток активной ветви потребителя на этом интервале считается неизменным
R1
1,
(1)
где
-«
Р1
- мгновенные значения тока
активной ветви в начале и в конце интервала коммутации соответственно. Из дифференциальных уравнений, описываюш 1х контур с учетом замещения активной ветви источником постоянного тока i const, следует
К
(2)
uf , i
где
L L-Lfi- L Ц
,
сь и, Ц - мгновенные значения напряжения нагрузки в начале и в конце интервала коммутации соответственно;- мгновенные значения тока компенсирующей емкости в начале и в конце интервала коммутации соответственно ; р - волновое сопротивление контура на интервале коммутации;
L - эквивалентная индуктивность параллельно включенных L-ветви и L -ветви.
учетом приращений токов за
ервал коммутации - 21 .2.,j в тч L
ветзи и L-ветви соответственно
ует
ci
- 2i,
- 2 i L V
где 1
- мгновенное значение входного тока нагрузки в начале интервала коммутации. Из (2) и (3) следует
Ui
.ЛГТ4
(i, - t, + ij(4)
После интервала коммутации на следующем интервале t, который равен заданному времени выключения, считается ток компенсирующей емкости неизменным
С2
1
С1
где 1
еа
мгновенное значение тока емкости в конце интерва -
Ла tg.
С учетом (5) следует
(3) , достижения нулевого значения кривой и (t) (фиг.4 в, г). , Построение вычислений по формуле (7) сложно реализовать в устройстс ве, поэтому формула вычислений приводится к виду, обеспечивающему аппаратурную точность и надежность работы устройства. Для этого обеспечивается повторяемость формы сигналов
10 на двух соседних полупериодах путем переключения полярности сигналов, поэтому в формулу (7) вводят переменные S-ij, S i и SU, а вместо периодически изменяющегося по полярности
J5 входного тока нагрузки i. вводятся однополярные величины: либо входной ток инвертора i , либо модуль входного тока нагрузки I i | ,и, кроме того, компенсируется возможная не20 линейность коммутирующей индуктив(5)
кости LI введением суммы величин ij + вместо величины ij, где смещение подбирается импирически.В результате указанных подстановок 25 в формулу (7) получается следующее:
и -а i
2 г
+ и.
(6)
где U- - мгновенное значение напряжения нагрузки в конце интервала t,,,. Из (3), (4), (6) следует
При достаточно большом значении L формула (7) упрощается при подстановке L ,что соответствует допущению о постоянстве тока потребителя на интервале коммутации.
Физический смысл кривых U(t) и ) проилюстрирован на фиг. 4. Если происходит включение тиристоров в момент t, то напряжение нагрузки через интервал коммутации t имеет значение U(t), а еще через интервал t - значение U,j(t) (фиг. 4 а) .Если включение тиристоров преждевременное то кривая U,j (t) не достигает нуле- вого значения, поэтому в конце интервала t напряжение нагрузки также не достигает нулевого значения и напряжение выключаемых тиристоров и остается отрицательным, следовательно, интервал предоставляемого
времени выключения t„ больше задан- ного t. (фиг.4 б).
Для обеспечения совпадения интер
валов t
Bbtk
t . осуществляется фактическое включение тиристоров в момент
кости LI введением суммы величин ij + вместо величины ij, где смещение подбирается импирически.В результате указанных подстановок 25 в формулу (7) получается следующее:
.-Si,-bJ-2-;(i
,1--/-р(,а-е) +
35
Отдельные вычислительные операции по формуле (8) выполняются отдельными блоками функционального преобразователя 7
(ij+O,
d
40
Si.
+ i j
S4 Si - Si
j, -Si, - iH - 2i j
U, Г( a, i i
U, a i + U
Л t - 1 . 1
де 1 J.
выходные сигналы сумматоров 12 - 14 с первого по третий соответственно; выходной сигнал нелинейного блока 17; выходной сигнал четвертого сумматора 15, одновременно являющийся выхода
э
t, с
LK
L
4L
с
ным сигналом функционального преобразователя 7;
fO
- постоянные коэффициенты.
Подстройка устройства под нагрузку осуществляется изменением коэффициентов а , а, а регулировка заданного времени выключения - изменением коэффициента а .
Характер изменения сигналов функ- t5 ционального преобразователя 7 показан на фиг.5. Сигналы Si , Si, SU формируются на выходах переключателя 11 полярности, который осуществляет поканальное переключение полярностей входных сигналов в момент изменения полярности напряжения нагрузки. Переключатель 11 полярности ожет быть выполнен, например, с использованием нуль-органа, регистрирующего полярность напряжения нагрузки , и каналов переключения поярности. Каждый канал может быть выполнен, например, с использованием двух противофазных ключей и инвертирующего звена, причем ключи, упраёляемые нуль-органом, подают на выход канала прямой или инвертированный входной сигнал канала.
20
25
30
Модуль входного тока нагрузки формируется на выходе блока 10 модуля, который осуществляет выпрямление входного сигнала 1„ и фильтра- lyiro коммутационного провала. Блок 10 может быть выполнен с использованием известных схем выпрямления на операционных усилителях и фильтрах высоких частот.
Постоянный сигнал смещения снимается с выхода источника 16 смещения, например со среднего вывода потенциометра, подключенного остальными двумя выводами к общей и питающ(ей шинам.
Квадратор 19, входящий в состав нелинейного блока 17, осуществляет операцию возвьппения в квадрат и может быть выполнен, например, на перемножителе с объединенными двумя входами.
Блок 21 извлечения корня, входящий в состав нелинейного блока 17, может быть выполнен, например, с использованием операционного усилителя и квадратора, включенного в отрицательную обратную связь операционного усилителя.
Работа составных частей нелинейного блока 17 осуществляется следующим образом:
J
J .|° 9 U ,
1 Р
а to.
о
j о j 0,
j о j о.
- мин о
Je
1 J
максО
f, -Ь, S
и - b j + b j
J - MO.KC
-1
f,
19
0,. f,0.
-f,.- b,s-u
b, j + b j
i: Utt«LIс
e
f,0 f .0,
Jf, to.
и - f
2®
+ S и - b j
T мин
5
5
0
5
где
j, : j,
.b , - b
U,
0 © 1ф 2®
коэффициенты аппроксимации ;
выходные сигналы сумматоров 22 - 27 с первого по шестой соответственно; выходной сигнал ограничителя 28 положительной, полярности;
выходные сигналы ограничителейотрицательной полярности с первого по третий соответственно.
Момент включения тиристоров инвертора, при котором обеспечивается заданное значение предоставляемого времени выключения, определяется с учетом всех влияющих факторов при минимальных допущениях.
На каждой полуволне напряжения нагрузки момент включения тиристоров определяется независимо, т.е. стабилизация предоставляемого времеки выключения осуществляется без- ынерционно и нет принципиального различия между статической и динамической ошибками стабилизации. По результатам испытаний установлено, что погрешность стабили зации обеспечиваемая устройством с учетом аппаратурной погрешности,.в установившихся и пусковых режимах не превышает 12%. Например, в инверторе с номи- иальной выходной частотой 4 кГц и задаваемым временем выключения 25 мк погрешность стабилизации не превышает 3 МКС в режимах с модуляцией интервала коммутации 5 - 25 мкс.
Передаваемая инвертором в нагрузку реактивная мощность сводится к минимуму, в результате чего уменьшаются установленная мощность и потери цепи входного тока инвертора, тиристов инвертора, соединительной цепи инвертора с нагрузкой,компенсирующей емкости, одновременно повышается КПД инвертора с нагрузкой, кроме того, уменьшается уста- новленная мощность пускового устройства и исключается его настройка при пуске инвертора, а также обеспечивается возможность пуска инвертора с большим значением коммутирующей индуктивности, что позволяет уменьшить коммутационные потери и установленную мощность тиристоров и защитных демпфирующих КС-цепей.
де и, i «
et
-текущие мгновенные значения напряжения нагрузки, входного тока инвертора, входного тока нагрузки, тока компенсирующей емкости ственно;
соответмодуль входного тока на
грузки;
постоянное смещение; 50 переключающая функция, имеющая значения +1 и -1 на интервалах положиПеречисленные преимущества позволяют удешевить элементы силовой схемы инвертора с нагрузкой И одновременно улучшить эксплуатационные характеристики .
Формула изобретения
Способ управления инвертором, подключенным через соединительную цепь к нагрузке в виде колебательного контура, образованного параллельно включенными активно-индуктив- Hbw потребителем и компенсирующей емкостью, заключающийся в том, что измеряют мгновенные значения напря- , жения нагрузки, формирзтот периодически изменяющееся управляющее напряжение и осуществляют очередное включение тиристоров инвертора в момент перехода управляющего напряжения через ноль,о тличающий- с я тем, что, с целью уменьшения передаваемой инвертором в нагрузку реактивной мощности путем повышения точности стабилизации предоставляемого времени выключения тиристоров,измеряют входной ток инвертора, входно ток нагрузки, ток компенсирующей емкости и осуществляют формирование управляющего напряжения согласно выражению, равнозначному приведенному в момент формирования отпирающих тиристоры импульсов:
тельной и отрицательной .полярностей напряжения нагрузки соответственно;
с - компенсирующая емкость; L - индуктивность потребителя ;
индуктивность соединит ль- ной цепи инвертора с..нагрузкой (коммутирующая индуктивность);
- заданное время выключения;
- управляющее напряжение.
L t Ua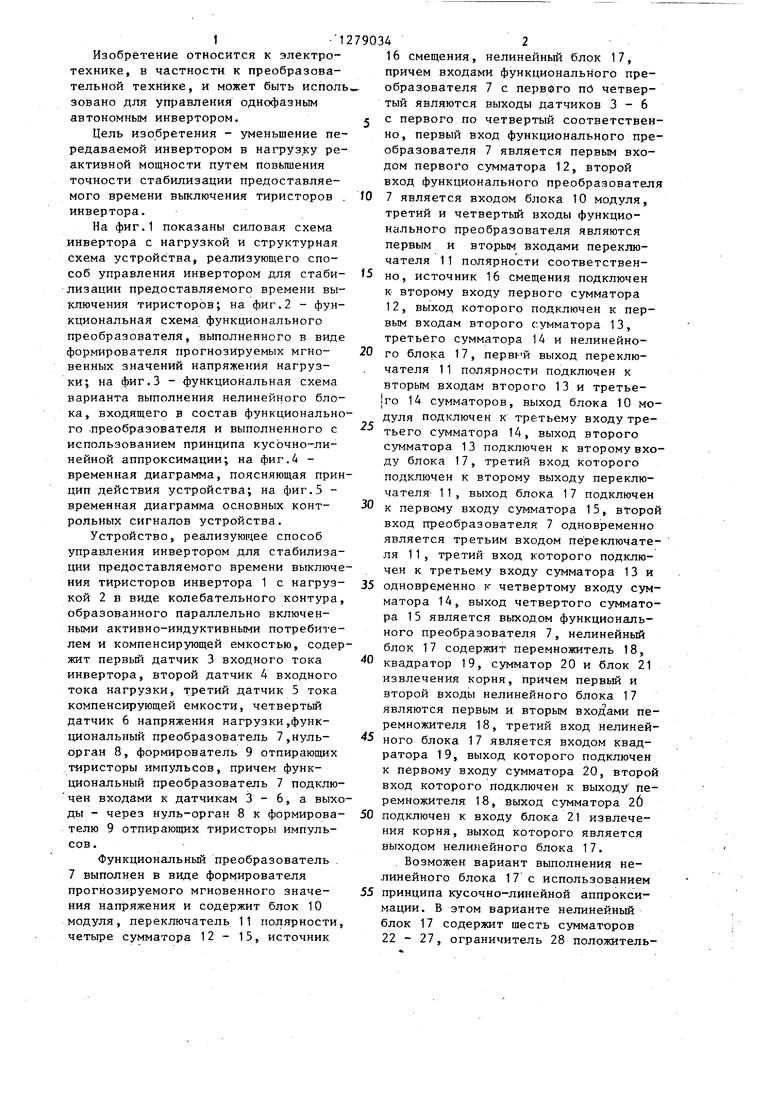

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления параллельным инвертором тока со стабилизирующим диодом | 1989 |
|
SU1690136A1 |
| СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ | 2007 |
|
RU2341002C1 |
| Выключатель | 1987 |
|
SU1555847A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ СОГЛАСОВАННЫМ ИНВЕРТОРОМ С РЕЗОНАНСНОЙ КОММУТАЦИЕЙ | 2009 |
|
RU2453977C2 |
| ПОЛНОСТЬЮ КОМПЕНСИРОВАННЫЙ ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1996 |
|
RU2117377C1 |
| АВТОНОМНЫЙ СОГЛАСОВАННЫЙ ИНВЕРТОР С КВАЗИРЕЗОНАНСНОЙ КОММУТАЦИЕЙ | 2009 |
|
RU2453976C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2011 |
|
RU2454782C1 |
| Устройство для управления преобразователем частоты | 1988 |
|
SU1629953A1 |
| Устройство для управления преобразователем частоты со звеном постоянного тока | 1986 |
|
SU1525841A1 |
| Способ управления тиристорным последовательно-параллельным резонансным мостовым инвертором | 1987 |
|
SU1467714A1 |

Изобретение относится к электротехнике и может быть использовано для управления однофазным автономным инвертором. Целью изобретения является уменьшение передаваемой инвертором в нагрузку реактивГТ f ной мощности путем повьшения точности стабилизации представляемого времени выключения тиристоров инвертора. На выходах датчиков 3, 4, 5 и 6 формируются сигналы, пропорциональные мгновенньм значениям входного тока инвертора, входного тока нагрузки, тока компенсирующей емкости и напряжения нагрузки. Эти сигналы поступают в функциональный преобразователь 7, который формирует периодический сигнал управляющего напрйжения с удвоенной частотой инвертора. Нуль-орган 8 регистрирует полярность управляющего напряжения, а формирователь 9 при каждом изменении полярности с положительной на отрицательную вьщает отпирающий импульс на непроводящую пару тиристоров. 5 ил. (Л .Ii I to О оо 4
о
Фиъ.З
i d,HHl i I /1„/ I
Отпирающие I 1 иппульсы I
иг.5
Редактор С.Пекарь
Составитель С.Парфенова
Техред В.Кадар Корректор Л.Пилипенко
Заказ 6852/57 Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.А/5
Производственно-полиграфичекое предприятие, г.Ужгород,ул.Проектная,4
| Винтовой механизм перемещения груза | 1988 |
|
SU1588703A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3882370, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
