Изобретение относится к домкратам, а также к устройствам для перемещения грузов в горизонтальной плоскости.
Цель изобретения - повышение безопасности и удобства в эксплуатации.
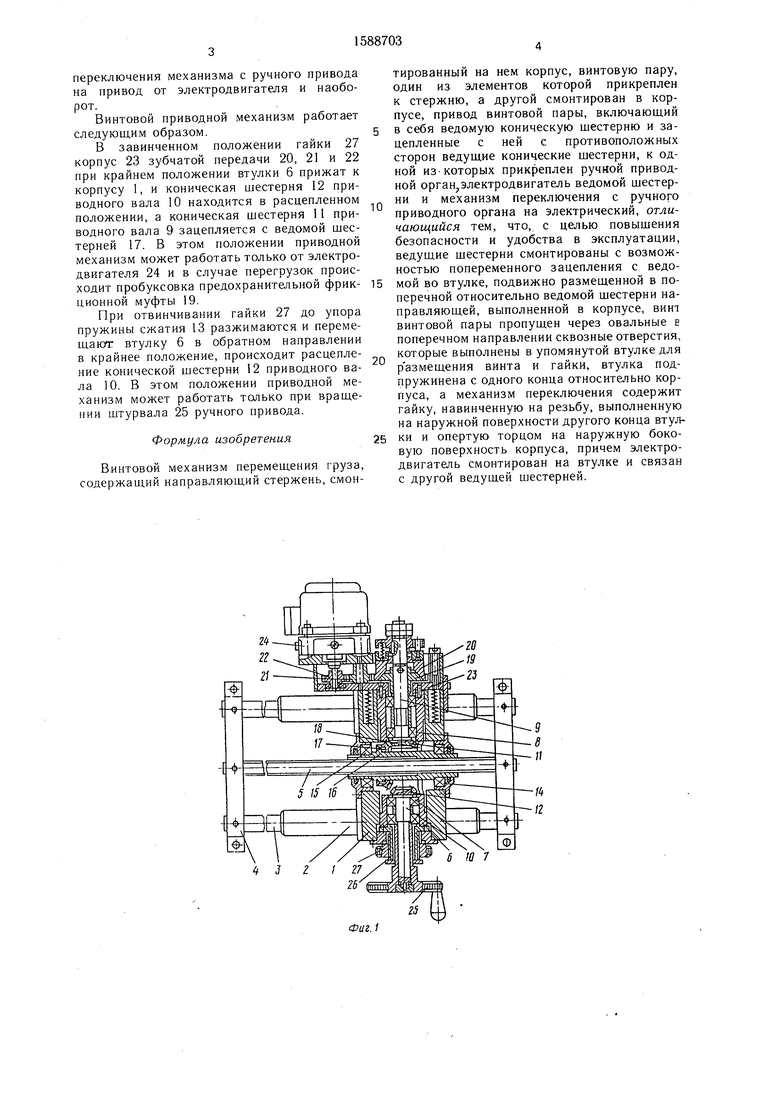
На фиг. 1 изображен винтовой механизм перемещения груза, вид сверху; на фиг. 2 - размещение ведущей щестерни во втулке; на фиг. 3 - сечение А-А на фиг. 2.
Винтовой механизм перемещения груза состоит из корпуса 1, направляющих втулок 2, смонтированных на направляющих стержнях 3, связанных между собой перемычками 4, в центре которых закреплен ходовой винт 5. В корпусе 1 внутри втулки 6 в шарикоподшипниках 7 и 8 установлены два приводных вала 9, 10 с ведущими коническими шестернями 11, 12. Втулка 6 в корпусе 1 установлена с возможностью возвратно- поступательного перемещения в направляющей, выполненной в корпусе, и подпружинена пружинами 13. Между коническими шестернями 11, 2 по центру корпуса 1 перпендикулярно осям приводных валов 9. 10 в ра дна л ьно-у норных и арикопо;иниг1Н1 ,ка 14. 15 размещена гайка 16, снабженная ведомой конической шестерней 17. находящейся в поочередном зацеплении с (нестернями 11. 12.
Втулка 6 имеет в средней части овальной формы отверстие 8 для размещения гайки 16 и выборку для размещения шестерни 17.
К приводному валу 9, снабженному предо.- хранительной фрикционной муфтой 19 с цилиндрическим зубчатым колесом 20, через цилиндрическую зубчатую передачу 21. 22, корпус 23 которой своим основанием прикреплен к торцу втулки 6, присоедине электродвигатель 24, а к приводному валу 10 присоединен приводной орган (н турвал) 25 ручного привода. Со стороны штурвала к торцу втулки 6 закреплена втулка 26 с наружной резьбой, на которую навинчена гайка 27 с рукояткой, предназначенная для
СП 00 00
vj
о
со
переключения механизма с ручного привода на привод от электродвигателя и наоборот.
Винтовой приводной механизм работает следующим образом.
В завинченном положении гайки 27 корпус 23 зубчатой передачи 20, 21 и 22 при крайнем положении втулки 6 прижат к корпусу 1, и коническая шестерня 12 приводного вала 10 находится в расцепленном положении, а коническая шестерня П приводного вала 9 зацепляется с ведомой mecj терней 17. В этом положении приводной механизм может работать только от электродвигателя 24 и в случае перегрузок происходит пробуксовка предохранительной фрикционной муфты 19.
При отвинчивании гайки 27 до упора пружины сжатия 13 разжимаются и перемещают втулку 6 в обратном направлении в крайнее положение, происходит расцепление конической шестерни 12 приводног о вала 10. В этом положении приводной механизм может работать только при вращении штурвала 25 ручного привода.
Формула изобретения
Винтовой механизм перемещения груза, содержащий направляющий стержень, смон
тированный на нем корпус, винтовую пару, один из элементов которой прикреплен к стержню, а другой смонтирован в корпусе, привод винтовой пары, включающий в себя ведомую коническую шестерню и зацепленные с ней с противоположных сторон ведущие конические шестерни, к одной из-которых прикреплен ручной приводной орган.,электродвигатель ведомой шестерни и механизм переключения с ручного приводного органа на электрический, отличающийся тем, что, с целью повышения безопасности и удобства в эксплуатации, ведущие щестерни смонтированы с возможностью попеременного зацепления с ведо- 5 мой во втулке, подвижно размещенной в поперечной относительно ведомой шестерни направляющей, выполненной в корпусе, винт винтовой пары пропущен через овальные в поперечном направлении сквозные отверстия, которые выполнены в упомянутой втулке для р азмещения винта и гайки, втулка подпружинена с одного конца относительно корпуса, а механизм переключения содержит гайку, навинченную на резьбу, выполненную на наружной поверхности другого конца втулки и опертую торцом на наружную боковую поверхность корпуса, причем электродвигатель смонтирован на втулке и связан с другой ведущей шестерней.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2000 |
|
RU2167806C1 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
| Устройство врезки отвода в действующий трубопровод, сменный патрон для него и центратор самоцентрирующийся для установки устройства на трубопровод | 2017 |
|
RU2663316C2 |
| Устройство для подачи длинномерного материала в зону обработки | 1988 |
|
SU1505643A1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| Подкатной домкрат | 1990 |
|
SU1752722A1 |
| Устройство для сборки резьбовых соединений | 1982 |
|
SU1147553A1 |
| Установка для врезки отводов в трубопровод | 1979 |
|
SU929953A1 |
| ДЕРЕВООБРАБАТЫВАЮЩИЙ НАСТОЛЬНЫЙ КОМБИНИРОВАННЫЙ СТАНОК | 1992 |
|
RU2015877C1 |
| ПОДКАТНОЙ АВТОМОБИЛЬНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2023 |
|
RU2804714C1 |

Изобретение относится к домкратам, а также к устройствам для перемещения грузов в горизонтальной плоскости. Цель изобретения - повышение безопасности и удобства в эксплуатации. Винтовой механизм перемещения груза содержит корпус, смонтированный на направляющих стержнях, приводную винтовую пару перемещения корпуса. На гайке смонтирована ведомая коническая шестерня, размещенная в овальном отверстии, выполненном во втулке, смонтированной в направляющей корпуса. Ведущие шестерни закреплены в упомянутой втулке с возможностью поочередного взаимодействия с ведомой. Вал одной ведущей шестерни приводится электродвигателем, другой - ручным приводным органом. Переключение ведущих шестерен осуществляется перемещением втулки: в одну сторону-гайкой, в другую-пружинами. Безопасность обеспечивается исключением возможности одновременного включения ручного привода и электроприводов. 3 ил.
4 J
Фиг. 1
20
гз
Фиг. 2
Фие. З
| ВИНТОВОЙ ДОМКРАТ | 1971 |
|
SU426956A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
