Изобретение относится к технике изучения природных ресурсов Земли, дистационными методами, в частности к аэросъемочной и счетно-решающей технике, предназначенной для формирования и регистрации- многоспектральных изображений участков земной поверхности, а также для прогнозирования в полете расположения объектов.
лого-цифрового преобразователя 6, синхронизатор 12, вход которого со единен с другим выходом блока 3 ска нирования, а выход подключен к другому входу блока 11 согласования и к другому входу аналого-цифрового преобразователя 6, входы группы которого соединены с выходами соответ ствующих фотоэлектрических преобраДель изобретения - повышение быст- 0 зователей 9; и вычислительные блородействия, уменьшение времени и стоимости проведения работ за счет оперативного прогнозирования объектов на борту летательного аппарата и оперативной коррекции направления поле- та по результатам прогнозирования.
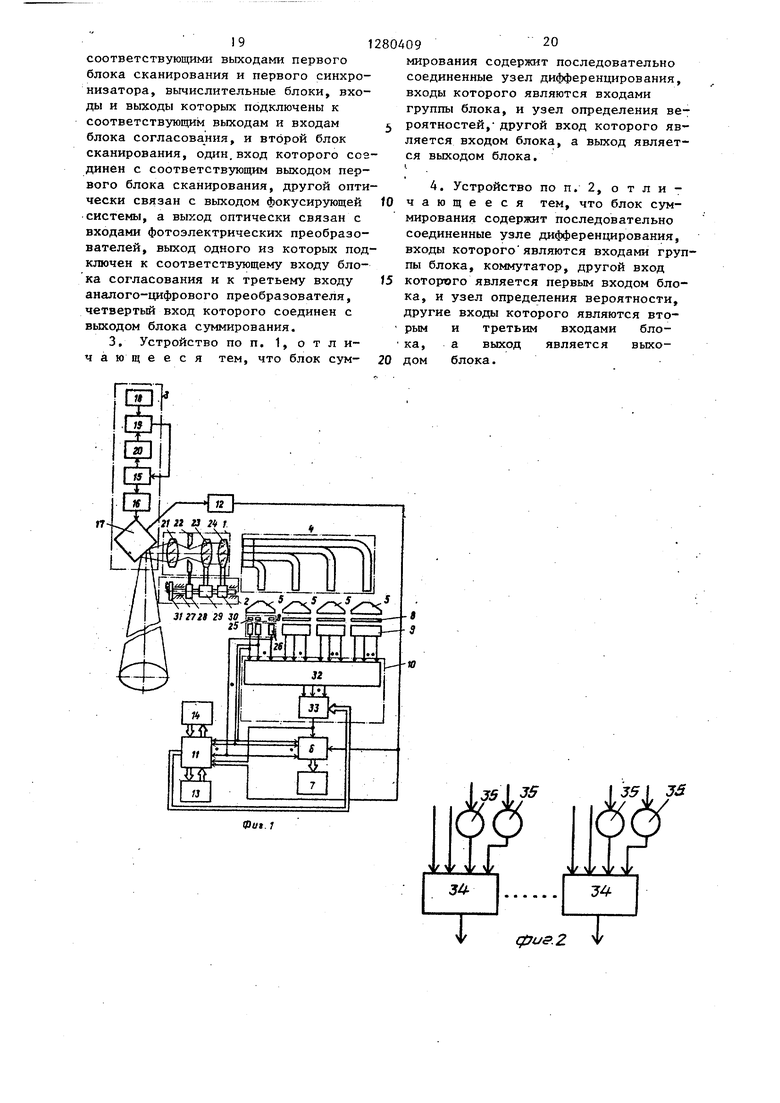
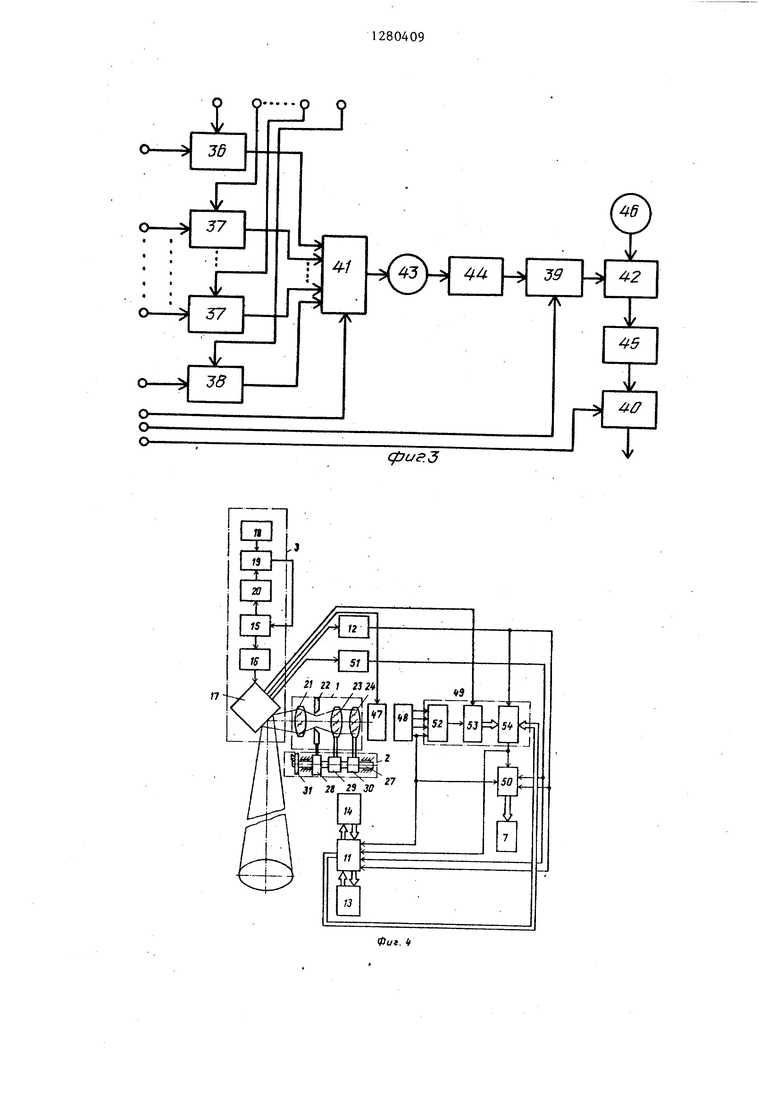
На фиг. 1 представлена блок-схема первого варианта устройства; на фиг.2 схема дифференцирующего узла устройства по первому варианту; на фиг.З - схема узла определения вероятности для устройства по первому варианту; на фиг. А - блок-схема второго варианта устройства; на фиг. 5 - схема дифференцирующего узла по второму ва рианту; на фиг. 6 - схема коммутатора для второго варианта устройства; на фиг. 7 - схема узла определения вероятности для второго варианта устройства.
,
Схема устройства по первому варианту (фиг. 1) содержит фокусирующую систему 1, входы которой подключены к соответствующим выходам блока 2 управления и оптически связаны с одним выходом блока 3 сканирования и с входами матрицы 4 оптических преобразователей, выходы которьпс оптически связаны с входами соответствующих расширителей 5, аналого-цифровой преобразователь 6, выход которого подключен к входу блока 7 регистрации, интерференционные фильтры 8, входы которых оптически связаны с выходами соответствующих расширителей 5, а выходы оптически связаны с входами соответствующих фотоэлектрических преобразователей 9, выходы которых подключены к соответствующим входам блока 10 сум шрования. В схему входит также блок 11 согласования, входы группы которого подключены к вьпсоду соответствующих фотоэлектрических преобразователей 9, а выход соединен с одним входом блока 10 суммирования, выход которого подключен к одному входу блока 11 согласования и к одному входу ана4092
лого-цифрового преобразователя 6, синхронизатор 12, вход которого соединен с другим выходом блока 3 сканирования, а выход подключен к другому входу блока 11 согласования и к другому входу аналого-цифрового преобразователя 6, входы группы которого соединены с выходами соответствующих фотоэлектрических преобраки 13 и 14, входы и выходы которых подключены к соответствующим выходам и входам блока 11 согласования.
5
- 20
25
30
-
Блок 3 сканирования состоит из двигателя 15, связанного через редуктор 16 с многогранным зеркальным барабаном 17, которьй оптически свя- зан с фокусирующей системой 1 (выход блока 3 сканирования). В состав блока 3 входят также блок 18 для согласования скорости сканирования со скоростью аппарата (не показан) и высотой полета, вырабатьшающий сигналы, пропорциональные величине отношения скорости полета V к высоте полета Н; блок 19 сравнения, вход которого соединен с выходом блока 18, тахогенератор 20, выход которого связан с двигателем 15, а выход подключен к блоку 19, выход которого соединен с управляющей обмоткой двигателя 15. ; Фокусирующая система 1 состоит
35 из объектива 21 (вход блока 1), диафрагмы 22 с регулируемым отверстием, расположенным в передней фокальной плоскости оптической системы с переменным увеличением, состоящей из линз
40 23 и 24, в задней фокальной плоскости которой размещена матрица светово- дов с четырьмя элементами, составляющая матрицу 4 оптических преобразователей,, выходы которых соединены с
45 соответствзтощими расширителями 5 светового пучка, например, выполненными в виде системы полупрозрачных зеркал. Каждый расширитель 5 светового пучка соединен со своим блоком 8 интерфе50 ренционных фильтров 25, число которых равно числу регистрируемых спектральных каналов г. На фиг. 1 интерференционные фильтры 25, входящие в блоки 8, показаны только для одно55 го блока 8. Каждый фильтр 25 состыкован со своим фотоэлектрическим npes- образователем (входы блока 9), например ФЭП, с усилителем, которые обозначены цифрой 26 и г ветвей которых
3
составляют блок 9 фотоэлектрических преобразователей, выходы которых являются выходами блока 9.
Блок 2 управления фокусирующей системы 1 выполнен в виде вала 27, на котором размещен кулачок 28, кинематически связанный с диафрагмой 22, и две винтовые пары 29 и 30, кинематически связанные с линзами 23 и 24. На валу укреплена поворотная
.рукоятка 31 с отсчетным лимбом.
Аналого-цифровой преобразователь 6 состоит из (г+1) преобразователей аналог-цифра. Вход одного преоб разователя подключен к выходу блока
10суммирования, а входы группы из
г преобразователей подключены к выходам соответствующих фотоэлектрических преобразователей 9. На вторые входы (г+1) преобразователей подключен выход синхронизатора 12, а выходы преобразователей являются выходами блока 6.
Синхронизатор 12 представляет собой подвижный диск, механически через редуктор связанный с валом 17 На диск нанесены группы щелей. Число щелей в группе равно количеству элементов в строке изображения. Щель освещается источником света. По другую сторону диска располагается фотоэлектрический преобразователь, выход которого является выходом блока 12.
Вычислительные блоки 13 и 14 и блок 11 служат для ввода, обработки, отображения информации и управления блоком 10 при работе в реальном масштабе времени. Блок 13 служит для ввода и отображения информации, представляет дисплейный процессор и выполняется, например, в виде интерактивной системы Периколор фирмы Ньюмелек. Блок 14 служит для обработки информации и вместе с блоком
11- для формирования управляющих напряжений для блока 10. Он представляет собой ЭВМ типа СМ-3, .
СМ-1420. Блок 11 согласования является аппаратурой КАМАК, связывающей блоки 13, 14 и 10.
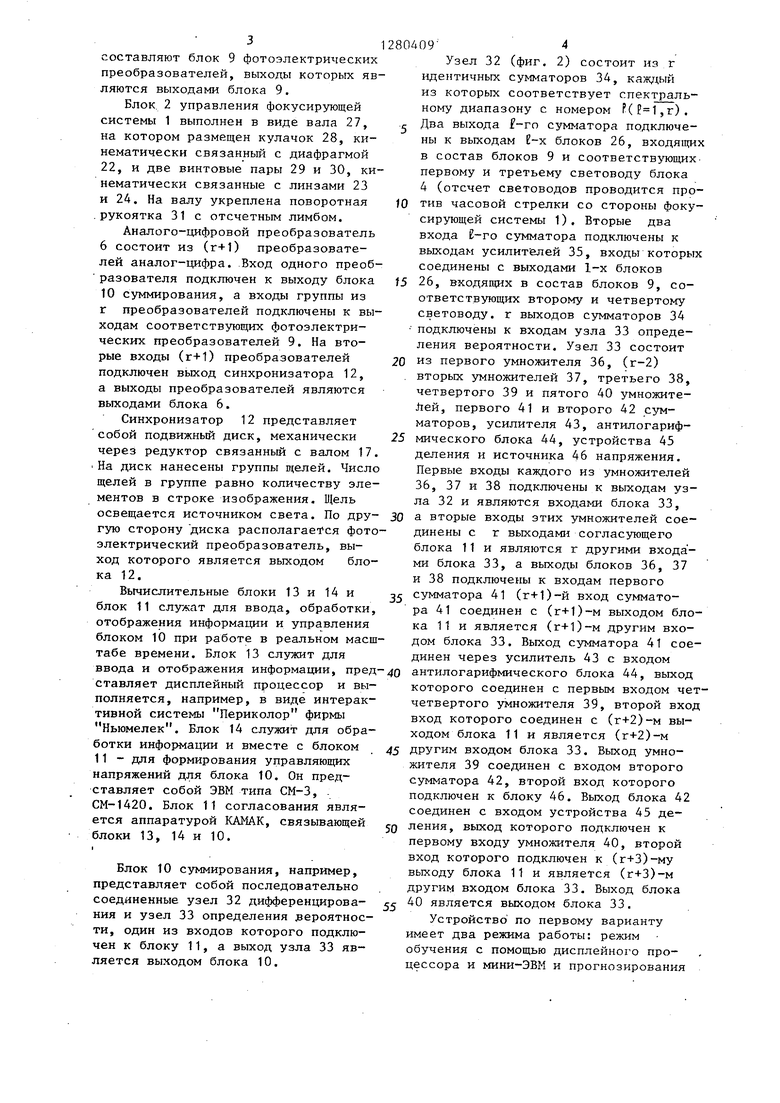
Блок 10 суммирования, например, представляет собой последовательно соединенные узел 32 дифференцирования и узел 33 определения вероятности, один из входов которого подключен к блоку 11, а выход узла 33 является выходом блока 10.
80409 4
Узел 32 (фиг. 2) состоит из г идентичных сумматоров 34, каж;;ый из которых соответствует спектральному диапазону с номером (,г). г Два выхода -го сумматора подключены к выходам Е-х блоков 26, входящих в состав блоков 9 и соответствующих первому и третьему световоду блока 4 (отсчет световодов проводится про- Ш ТИБ часовой стрелки со стороны фокусирующей системы 1). Вторые два входа 1-го сумматора подключены к выходам усилит елей 35, входы которых соединены с выходами 1-х блоков f5 26, входящих в состав блоков 9, соответствующих второму и четвертому световоду, г выходов сумматоров 34 подключены к входам узла 33 определения вероятности. Узел 33 состоит 20 из первого умножителя 36, (г-2) . вторых умножителей 37, третьего 38, четвертого 39 и пятого 40 умножите- Лей, первого 41 и второго 42 сумматоров, усилителя 43, антилогариф- 25 мического блока 44, устройства 45 деления и источника 46 напряжения. Первые входы каждого из умножителей 36, 37 и 38 подключены к выходам узла 32 и являются входами блока 33, 30 а вторые входы этих умножителей соединены с г выходами согласующего блока 11 и являются г другими входа - ми блока 33, а выходы блоков 36, 37 и 38 подключены к входам первого сумматора 41 (г+1)-и вход сумматора 41 соединен с (г+1)-м выходом блока 1 1 и является (г+1)-м другим входом блока 33. Выход сумматора 41 соединен через усилитель 43 с входом 0 антилогарифмического блока 44, выход которого соединен с первым входом чет- четвертого умножителя 39, второй вход вход которого соединен с (г+2)-м выходом блока 11 и является (г+2)-м 5 другим входом блока 33. Вькод умножителя 39 соединен с входом второго сумматора 42, второй вход которого подключен к блоку 46. Выход блока 42 соединен с входом устройства 43 де- 0 ления, выход которого подключен к первому входу умножителя 40, второй вход которого подключен к (г+3)-му выходу блока 11 и является (г+3)-м другим входом блока 33. Выход блока 40 является выходом блока 33.
Устройство по первому варианту имеет два режима работы: режим обучения с помощью дисплейного процессора и мини-ЭВМ и прогнозирования
в пределах кадра дисплея; режим прогнозирования объекта с помощью опто- электронных блоков в реальном времени.
Режим обучения с помощью дисплейного процессора и мини-ЭВМ и прогнозирование в пределах кадра дисплея.
При вращении зеркального барабана 17 отраженное от местности солнечное излучения отражается от его грани и через объектив 21, диафрагму 22 и линзы 23 и 24, образующие оптическую систему с переменным увеличением, поиз г преобразователей блока 6 поступают сигналы с соответствующего выхода одного из фотоэлектрических преобразователей 26, На другой вход каждого из г преобразователей блока 6 поступают сигналы с выхода первого синхронизатора 12. Подвижный диск синхронизатора 12, связанный через редуктор с валом блока 17, вращается, в результате .чего свет от источника проходит через щели диска, преобразуясь в электрические сигналы в фотоэлектрическом преобразователе блока 12. Последовательность импуль20
25
падает на матрицу 4 оптических преоб- 15 сов, соответствующих окончанию элементов строки, синхронизирует работу г преобразователей блока 6, с выходов которых двоичные последовательности, соответствующие кодовым комбинациям дискретных отсчетов, поступают в блок 7 регистрации (например, магнитофон).
I
Кроме того, аналогичные напряжения поступают на устройство 11 согласования (на аналого-цифровые преобразователи, входящие в состав аппаратуры КАМАК). В результате этого через устройство 11 согласования напряжение с выхода блока 9 поступает на экран дисплейного процессора 13, Развертка изображения по строке осуществляется вращением зеркального .барабана 17. Сканирование в направлении полета осуществляется за счет поступательного движения летательного аппарата. Для исключения искажений, связанных с переналожением строк или их пропуском, напряразователей. С помощью рукоятки 31 с отсчетным лимбом вращается вал 27. При зтом кулачок 28, связанный с механизмом раскрытия диафрагмы 22, регулирует отверстие диафрагмы 22 и этим устанавливает область анализируемого участка местности. При этом устанавливается требуемое разрешение на местности. Чем больше угловые размеры объекта, тем меньще требуемое разрешение, тд.к как при этом в большей степени подавляются мешающ 1е высокочастотные факторы. Одновременно автоматически с помощью винтовых пар 29 и 30 устанавливается положение линз 23 и 24 системы с переменным увеличением. При этом анализируемое изображение участка местности независимо от его размеров перекрывает всю площадь матрицы 4 световодов оптических преобразователей, а положение фокальных плоскостей оптической системы с переменным увеличением остается неизменным и располагается ь плоскости диафрагмы 22 и поверхности матрицы 4 световодов бло- блока. С выходов каждого световода свет поступает на свой расширитель 5 светового пучка, который распределяет энергию этого пучка на г интерференционных фильтров 25, составляющих блок 8. С выхода каждого интерференционного фильтра 25 свет соот- ветствуницей узкой спектральной облас30
35
40
скорости полета V к его высоте Н, с выхода блока 18 подается на вход блока 19 сравнения, на второй вход которого подается также сигнал та- 45 хогенератора 20. (Блок 18 является устройством деления, на входы которого подаются сигналы с бортовых приборов скорости V и высоты полета Н. Блок сравнения является суммато-
ти попадает на электрические преобра- 50 один вход которого подключается
зователи 26 блоков 9. В результате пучок света от каждого из четырех элементов изображения, фокусируемого на матрицу 4 световодов блока, разлагается на г спектральных составляющих, определяемьгх шириной полосы пропускания интерференционных фильтров 25, и преобразуется в электрические сигналы. На первый вход каждого
из г преобразователей блока 6 поступают сигналы с соответствующего выхода одного из фотоэлектрических преобразователей 26, На другой вход каждого из г преобразователей блока 6 поступают сигналы с выхода первого синхронизатора 12. Подвижный диск синхронизатора 12, связанный через редуктор с валом блока 17, вращается, в результате .чего свет от источника проходит через щели диска, преобразуясь в электрические сигналы в фотоэлектрическом преобразователе блока 12. Последовательность импуль5 сов, соответствующих окончанию элементов строки, синхронизирует работу г преобразователей блока 6, с выходов которых двоичные последовательности, соответствующие кодовым комбинациям дискретных отсчетов, поступают в блок 7 регистрации (например, магнитофон).
скорости полета V к его высоте Н, с выхода блока 18 подается на вход блока 19 сравнения, на второй вход которого подается также сигнал та- хогенератора 20. (Блок 18 является устройством деления, на входы которого подаются сигналы с бортовых приборов скорости V и высоты полета Н. Блок сравнения является суммато-
через усилитель с коэффициентом усиления (-1), что обеспечивает выполнение операции вычитания). С выхода блока 19 сравнения сигнал рассогла- 55 сования поступает на управляющую обмотку двигателя 15, в результате чего скорость вращения сканера 17 согласуется с отношением V/H. Оператор, наблюдая на экране дисплейного
128040
процессора изображение местности, корректирует направление полета та КИМ образом, чтобы выбранные им обучающие объекты попали в кадр дисплея процессора 13. После этого он фикси- 5 рует выбранный им кадр на экране и в памяти дисплейного процессора и назначает с помощью средств дисплейного процессора (в системе Перико- лор, например это трэк-болл) облас- fO
,ти обучения, т.е. выделяет эти области, присваивает каждой точке области значение вероятности нахождения объекта, затем всему изображению не;
входящему в области обучения, присва иваются одинаковые значения, не равные назначенным в областях обучения (для различения областей программой мини-ЭВМ). После этого г спектральных составляющих изображения, соот- ветствующие: кадру дисплея, оператор направляет из памяти дисплейного процессора 13 и с его экрана через блок 11 в мини-ЭВМ 14. Самообучающийся алгоритм, реализованный на мини-ЭВМ, проводит прогнозирование расположе. ния объекта для выбранного кадра дисплея и определяет значения постоянных напряжений, подаваемых с помощью мини-ЭВМ 14 и согласующего бло ка 11 (цифроаналоговые преобразователи КАМАК) на другие входы блока 33 для прогнозирования в реальном масштабе времени.
Алгоритм прогнозирования объекта в пределах кадра дисплея можно построить разными способами (это разнообразие связано с возможностью применения нескольких математических моделей при описании одного явления, а также различной степенью приближения к оптимальному решению при выбранной модели).
Ниже приводится один из примеров алгоритма прогнозирования объекта в пределах кадра дисплея с помощью соотношения
N
Р. Г С, Р,
k l
Kf
(1)
де Р
N
-оценка вероятности присутствия объекта в текущей точке f;
-количество точек в области 55 обучения алгоритма;
С| - константы, определяемые в режиме обучения в блоке ,14;
,- переходная вероятность из точки k области обучения с координатами t,. , t в текущую точку f с координатами t,, t (при условии выполнения гипотезы 1 о присутствии объекта в точке k) определяется следующим образом
РН (AKlli -liiZi/Yli).
Kf Р„ (4i)o.,.(y,/y,)+P, (i,f)W,,(yf /У.)
1
).Cpji(Yf./Xi) Р„ ()СО„ ()
(2)
где &
(t,f-t,j2-b(t2i-t.,J2 Kf -1k - -«-at -Ittрасстояние между точками k и f;
Р, (Д /) вероятность выполнения гипотезы 1 о наличии объекта в точке f, если объект присутствует в точке k;
р () - вероятность выполнения гипотезы 2 об отсутствии объекта в точке f, если объект присутствует в точке k.
Эти вероятности в предположении о наличии марковского свойства для потока событий определяются равенством
.Л
к
az
)V-+ 2Ji ();
Pn i --of-((3)
Ы. а,, + а.,, ; V ехр () ,
где , а, - интенсивности перехо- дов из состояний 1 в 2 и обратно;
( плотность вероятности
значений вектора яркости размерности г (для г спектральных компонент), если в точ-
точке k известны значения вектора яркости у размерности г, при условии. Что в точках k и f выполняется гипотеза 1;
6Э,(уг/у) - плотность вероятности
значении вектора яркости у, , если в точке k известен вектор яркое 1280409
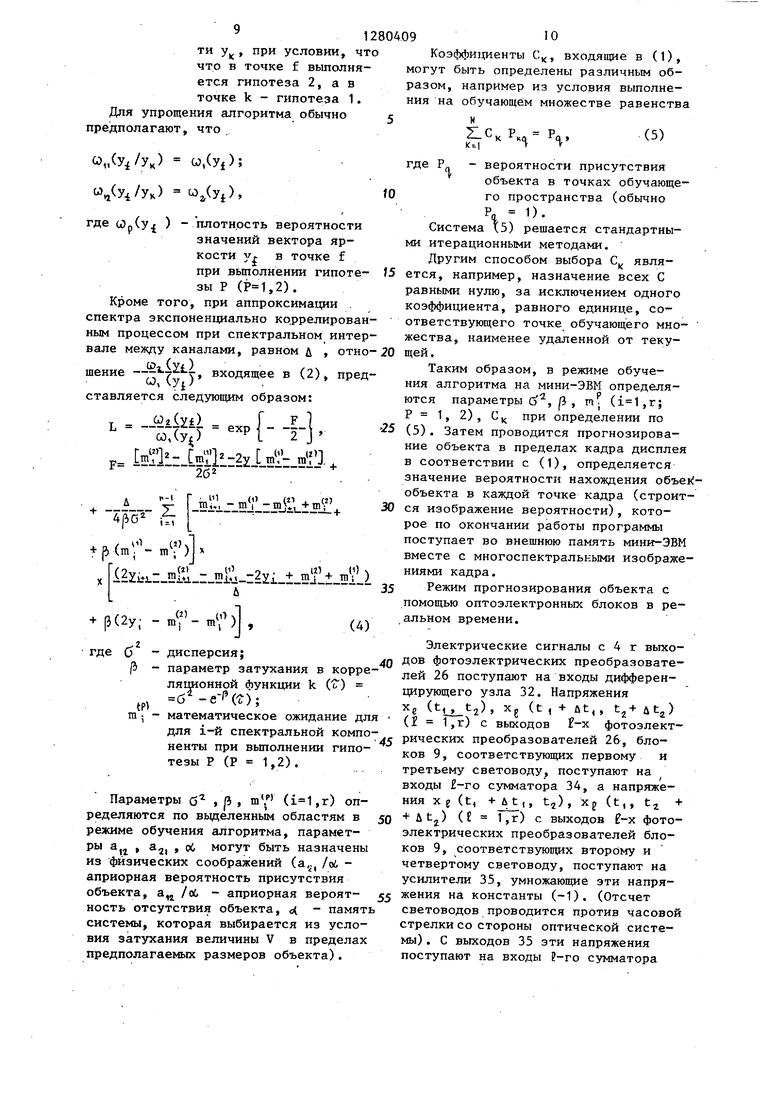
ти у, при условии, что что в точке f вьшолня- ется гипотеза 2, а в точке k - гипотеза 1. Для упрощения алгоритма обычно редполагают, что
мо ра ни
О„() w,(yf);
,()
У
где (О
,(У{ )
- плотн.ость вероятности значений вектора яркости з г в точке f при выполнении гипотезы Р (,2).
Кроме того, при аппроксимации . спектра экспоненциально коррелированным процессом при спектральном интерми
15
- вероятности присутствия объекта в точках обучающего пространства (обычно Р„ 1).
Система Х5) решается стандартны- итерационными методами. Другим способом выбора С являвале между каналами, равном Д
входящее в (2), предщениесо, (yj)
ставляется следующим образом: т. )
ется, например, назначение всех С равными нулю, за исключением одного коэффициента, равного единице, соответствующего точке обучающего множества, наименее удаленной от теку- отно- 20 щей,
Таким образом, в режиме обучения алгоритма на мини-ЭВМ определяются параметры Сз, П , т (,г;
ехр
.
со,(у)
Р Wr -Urt-22 «. ; - m fl t - 26 2P 1, 2), С ц при определении по 25 (5), Затем проводится прогнозирование объекта в пределах кадра дисплея в соответствии с (1), определяется значение вероятности нахождения объек объекта в каждой точке кадра (строит- 30 ся изображение вероятности), которое по окончании работы программы поступает во внешнюю память мини-ЭВМ вместе с многоспектральными изображениями кадра.
где б ft tP
m -
дисперсия;
параметр затухания в корреляционной функции k ( Г) 6 -6- ( с);
математическое ожидание дл для i-й спектральной компоненты при вьшолненин гипотезы Р (Р 1,2).
Параметры G 3 т . (1 ° ределяются по вьщеленным областям в режиме обучения алгоритма, параметры a,j , а, , сб могут быть назначены из физических соображений (а,, /об - априорная вероятность присутствия объекта, а, /оС - априорная вероят- ность отсутствия объекта, с( - памят системы, которая выбирается из условия затухания величины V в пределах предполагаемых размеров объекта).
9
10
Коэф4)И1щенты С, входящие в (1), могут быть определены различным образом, например из условия выполнения на обучающем множестве равенства
р
(5)
где Р
ми
- вероятности присутствия объекта в точках обучающего пространства (обычно Р„ 1).
Система Х5) решается стандартны- итерационными методами. Другим способом выбора С является, например, назначение всех С равными нулю, за исключением одного коэффициента, равного единице, соответствующего точке обучающего множества, наименее удаленной от теку- щей,
P 1, 2), С ц при определении по (5), Затем проводится прогнозирование объекта в пределах кадра дисплея в соответствии с (1), определяется значение вероятности нахождения объек - объекта в каждой точке кадра (строит- ся изображение вероятности), которое по окончании работы программы поступает во внешнюю память мини-ЭВМ вместе с многоспектральными изображениями кадра.
Режим прогнозирования объекта с помощью оптоэлектронных блоков в реальном времени.
0
5
Электрические сигналы с 4 г выходов фотоэлектрических преобразователей 26 поступают на входы дифференцирующего узла 32. Напряжения
(t,, tj),
(t
ut)
J V- 1 ut, ,
(f 1,r) с выходов f-x фотоэлект- 5 рических преобразователей 26, блоков 9, соответствующих первому и третьему световоду, поступают на входы -го сумматора 34, а напряжения X g (t, + Л t , , tj) , Xg (t , , t +
0
+ utj) (
1,r) с выходов -x фотоэлектрических преобразователей блоков 9, соответствующих второму и четвертому световоду, поступают на усилители 35, умножающие эти напряжения на константы (-1). (Отсчет световодов проводится против часовой стрелки со стороны оптической системы) . С выходов 35 эти напряжения поступают на входы -го сумматора
111280409
, на выходе которого формируются апряжения y(,,t) xp(t, +
Ut, , tj + ut) - XfCt, , t +Ut2)X (t, +ut, , t.) +
-e
(t.
tz),
вх
на со ря 5 ту вы ту от вт из бл ра у
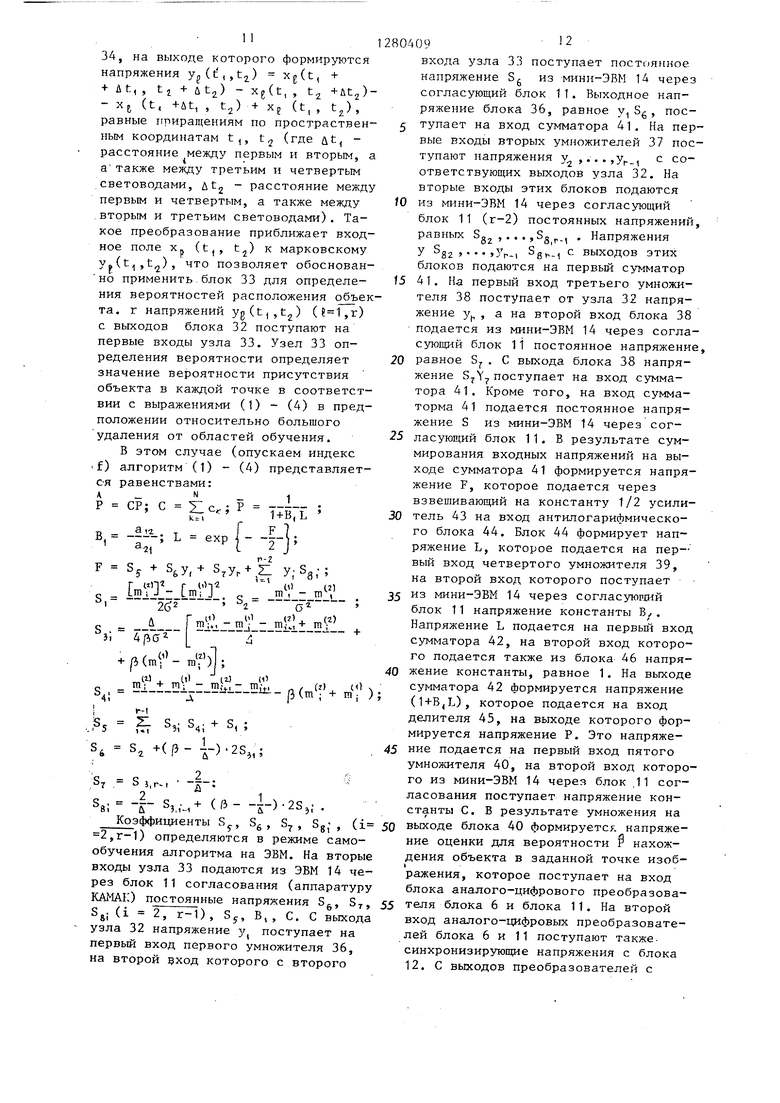
равные ггриращениям по простраствен- ным координатам t,, t (где ut, - расстояние между первым и вторым, а а также между третьим и четвертым световодами, Atj - расстояние между первым и четвертым, а также между вторым и третьим световодами). Такое преобразование приближает входное поле х. (t,, tj) к марковскому y(t,,t), что позволяет обоснован но применить блок 33 для определения вероятностей расположения объек- та, г напряжений yg(t,,t2) (,r) с выходов блока 32 поступают на первые входы узла 33. Узел 33 определения вероятности определяет значение вероятности присутствия объекта в каждой точке в соответствии с выражениями (1) - (4) в предположении относительно большого удаления от областей обучения. В этом случае (опускаем индекс
f) алгоритм (1) - (4) представляется равенствами:
-2,г-1) определяются в режиме самообучения алгоритма на ЭВМ. На вторые входы узла 33 подаются из ЭВМ 14 через блок 11 согласования (аппаратуру КАМАК) постоянные напряжения S, S, Sg, (i 2, r-1), Sy, B,, C. С выхода узла 32 напряжение у поступает на первый вход первого умножителя 36, на второй ход которого с второго
входа узла 33 поступает постоянное
напряжение Sg из -мини-ЭВМ 14 через согласующий блок 11. Выходное напряжение блока 36, равное у,Sg, пос- тупает на вход сумматора 41. На первые входы вторых умножителей 37 поступают напряжения у ,.. .,у,,, с соответствующих выходов узла 32. На вторые входы этих блоков подаются из мини-ЭВМ 14 через согласующий блок 11 (г-2) постоянных напряжений, равных Sg , . . . ,Sg , . Напряжения у S
82
if-l
с ВЫХОДОВ ЭТИХ
блоков подаются на первый сумматор 41. На первый вход третьего умножителя 38 поступает от узла 32 напряжение у , а на второй вход блока 38 подается из мини-ЭВМ 14 через согласующий блок 11 постоянное напряжение.
20
равное S . С выхода блока 38 напряжение поступает на вход сумматора 41. Кроме того, на вход сумма- терма 41 подается постоянное напряжение S из мини-ЭВМ 14 через сог25 ласующий блок 11. В результате суммирования входных напряжений на выходе сумматора 41 формируется напряжение F, которое подается через взвешивающий на константу 1/2 усили30 тель 43 на вход антилогарифмического блока 44. Блок 44 формирует напряжение L, которое подается на пер- вый вход четвертого умножителя 39, на второй вход которого поступает
35 из мини-ЭВМ 14 через согласуюг ий блок 11 напряжение константы Б/. Напряжение L подается на первьп вход сумматора 42, на второй вход которого подается также из блока 46 напря0 жение константы, равное 1. На выходе
сумматора 42 формируется напряжение (), которое подается на вход делителя 45, на выходе которого формируется напряжение Р. Это напряже5 ние подается на первый вход пятого умножителя 40, на второй вход которого из мини-ЭВМ 14 через блок .11 согласования поступает напряжение константы С. В результате умножения на
0 выходе блока 40 формируется напряжение оценки для вероятности Р нахождения объекта в заданной точке изоб- 1 ражения, которое поступает на вход
блока аналого-цифрового преобразова- 5 теля блока 6 и блока 11. На второй вход аналого-цифровых преобразователей блока 6 и 11 поступают также. синхронизирующие напряжения с блока 12. С выходов преобразователей с
13
частотой следования элементов в , строке изображения двоичные последовательности поступают в блок 7 и через блок 11 на вход дисплейного процессора 13. Оператор анализирует изображение вероятности, подключая его к экрану дисплея, и в случае необходимости корректирует направление полета.
Устройство по второму варианту содержит ряд блоков, аналогичных- первому варианту устройства с аналогичными связями. Такими блоками являются блоки 1-3, 7, 12-14. Отдельные блоки имеют несколько отличающуюся структуру и (или) связи или являются новыми: второй блок 47 сканирования по спектру; блок 48 фотоэлектрических преобразователей, блок 49 суммирования, аналого-цифровой преобразователь 50, второй синхронизатор 51, устройство 11 согласования. Второй блок 47 сканирования по спектру расположен за системой с переменным увеличением, механически через-редуктор связан с блоком 17 и представляет собой прозрачный диск с нанесенным на нем прозрачным непрерывным по всей области спектра фильтром, выполненным например, в виде циркулярного интерференционного фильтра. Вал диска через редуктор соединен с валом блока 17. Блок 48 фотоэлектрических преобразователей состоит из четырех элементов, расположенных в фокусе оптической системы с переменным увеличением за блоком 47. Четыре выхо- да блока подключены к входам группы блока 49 суммирования, а один из ни них подключен к входу устройства 11 согласования, а также к входу первого аналого-цифрового преобразователя, входящего в блок 50 и являющего1
45 ся т.ретьим входом блока 49.
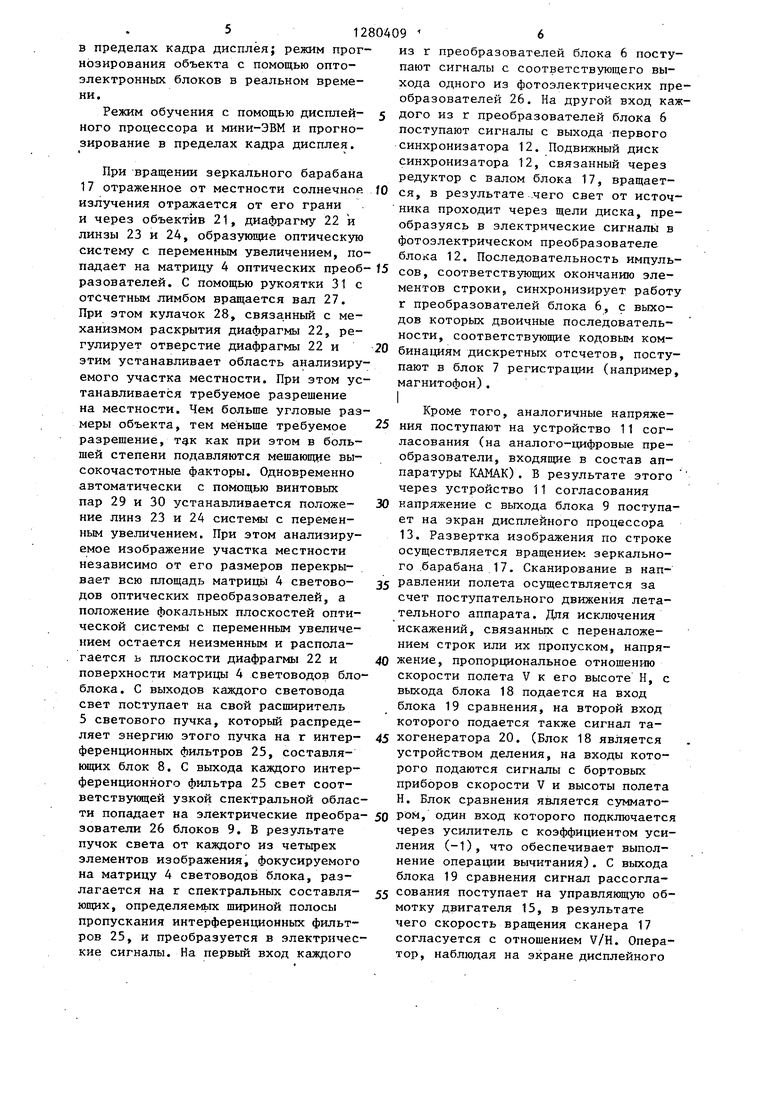
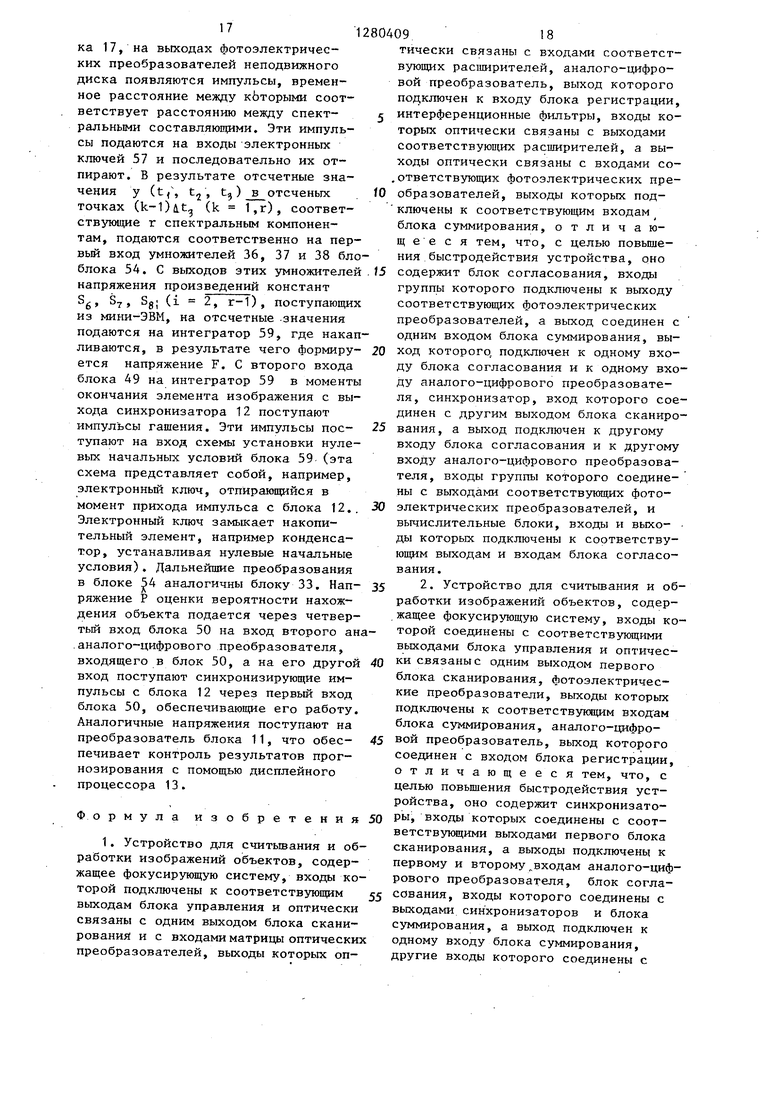
Блок 54 определения вероятности изображен на фиг. 7. Структура этого блока в основном аналогична структуре и связям блока 33 (фиг. 1 и 3),
ся его третьим входом.
Блок 49 суммирования содержит, например, последовательно соединенные узел 52 дифференцирования, входы- которого являются входами группы блока, подключенными к выходам бло- 50 однако умножители 36 - 38 своими ка 48, коммутатор 53, другой вход ко- первыми входами подключены к выходам торого является первым входом блока, коммутатора 53, а вместо сумматора соединенным механически через редуктор с блоком 17, и узел 54 определения вероятности, другие входы которого являются вторым и третьим входами блока, соединенными с синхронизатором 12 и блоком 11, а выход является выходом блока.
41 применен интегратор 59 с аналогичными связями. Интегратор 59 имеет 55 также дополнительную связь с выходом первого синхронизатора 12 через второй вход блока 49. Выход блока 54 подключен к блоку 11 согласования и к входу второг о преобразователя блока
2804091
Схема узла 52 дисЬференцирования изображена на фиг. 5. Блок 52 имеет в своем составе сумматор 55, первые входы которого соединены с выхос дами первого и третьего фотоэлектрических преобразователей, входящих в блок 48 (их нумерация проведена против часовой стрелки со стороны оптической системы), а два вторых
10 входа соединены через усилители 56 с выходами второго и четвертого фотоэлектрических преобразователей с усилителями. Выход блока 55 является выходом блока 52. Другой вход коммутаf5 тора 53, являющийся первым входом блока 49, механически связан через редуктор с валом блока 17.
Коммутатор 53 представлен на фиг. 6. Он состоит из г электронных
20 ключей 57 и блока 58 управления ключами. Первые входы электронных ключей 57 подключены к входу коммутатора 53, т.е. к выходу блока 52, а их выходы являются выходами блока 53 и
25 подключены к входам блока 54. Блок 58 управления ключами 57 представляет собой два соосно расположенных диска (подвижный и неподвижный). На неподвижном диске расположены по ок30 ружности г фотоэлектрических преобразователя, выходы которых являются выходами блока 58. Подвижный диск связан через редуктор с валом блока 17. Эта связь является первым вхоj дом блока 49. Подвижный диск имеет прорези, расположенные по окружности, напротив которых закреплен источник света. Выход блока 54 соединен с входом второго аналого-цифро40 вого преобразователя, входящего в блок 50 через его четвертый вход, а также с устройством 11 согласования, которое своими выходами подключено к другим входам блока 54, являющим45 ся т.ретьим входом блока 49.
Блок 54 определения вероятности изображен на фиг. 7. Структура этого блока в основном аналогична структуре и связям блока 33 (фиг. 1 и 3),
- 50 однако умножители 36 - 38 своими - первыми входами подключены к выходам , коммутатора 53, а вместо сумматора однако умножители 36 - 38 своими первыми входами подключены к выходам коммутатора 53, а вместо сумматора
41 применен интегратор 59 с аналогичными связями. Интегратор 59 имеет также дополнительную связь с выходом первого синхронизатора 12 через второй вход блока 49. Выход блока 54 подключен к блоку 11 согласования и к входу второг о преобразователя блока
15
аналого-цифрового преобразователя, являющегося четвертым входом блока 50. Другой вход этого пр еобразовате- ля подключен через первый вход блока 50 к выходу первого синхронизатора 12, Выход первого синхронизатора 12 подключен также к устройству 11 coi - ласования. Другой вход первого аналого-цифрового преобразователя, входящего в блок 50, подключен к выходу
второго синхронизатора 51 через второй вход блока 50. Выход блока 51 соединен также с устройством 11 согласования. Вход второго синхронизатора 51 соединен через редуктор с валом блока 17. Блок 51 состоит из диска, связанного через редуктор с блоком 17. Диск имеет по окружности группы, состоящий из г щелей, соответствующих г спектральным компонентам. Диск снабжен источником света и фотоэлектрическим преобразователем, выход которого является выходом синхронизатора 51.
12
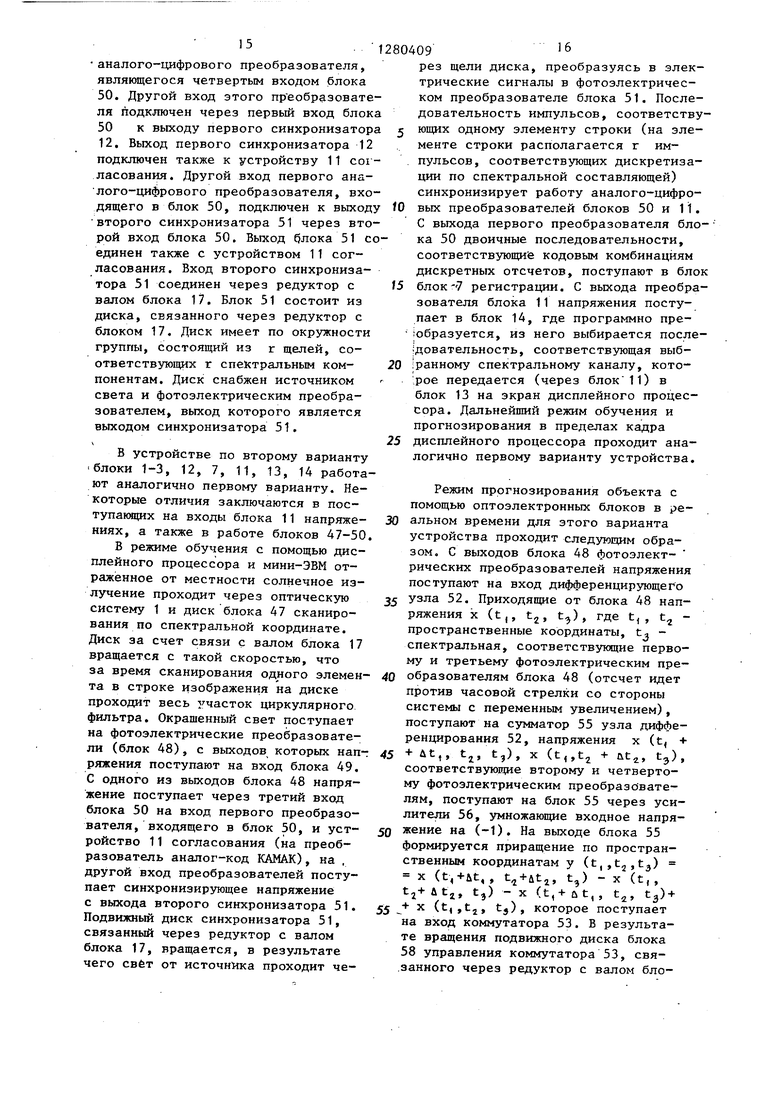
В устройстве по второму варианту блоки 1-3, 12, 7, 11, 13, 14 работают аналогично первому варианту. Некоторые отличия заключаются в пос- тупакицих на входы блока 11 напряжениях, а также в работе блоков 47-50
В режиме обучения с помощью дисплейного процессора и мини-ЭВМ отражённое от местности солнечное излучение проходит через оптическую систему 1 и диск блока 47 сканирования по спектральной координате. Диск за счет связи с валом блока 17 вращается с такой скоростью, что за время сканирования одного элемента в строке изображения на диске проходит весь участок циркулярного фильтра. Окрашенный свет поступает на фотоэлектрические преобразователи (блок 48), с выходов которых нап ряжения поступают на вход блока 49. С одного из выходов блока 48 напряжение поступает через третий вход блока 50 на вход первого преобразователя, входящего в блок 50, и устройство 11 согласования (на преобразователь аналог-код КАМАК), на . другой вход преобразователей поступает синхронизирующее напряжение с выхода второго синхронизатора 51. Подвижный диск синхронизатора 51, связанный через редуктор с валом блока 17, вращается, в результате чего свбт от источника проходит че
280409
рез щели диска, преобразуясь в электрические сигналы в фотоэлектрическом преобразователе блока 51. Последовательность импульсов, соответству- г ющих одному элементу строки (на элементе строки располагается г импульсов, соответствующих дискретизации по спектральной составляющей) синхронизирует работу аналого-цифроfO вых преобразователей блоков 50 и 11. С выхода первого преобразователя блока 50 двоичные последовательности, соответствующие кодовым комбинациям дискретных отсчетов, поступают в блок
/5 регистрации. С выхода преобразователя блока 11 напряжения поступает в блок 14, где программно пре- 1образуется, из него выбирается после- ; довательность, соответствующая выб20 Iранному спектральному каналу, кото- рое передается (через ) в блок 13 на экран дисплейного процессора. Дальнейший режим обучения и прогнозирования в пределах кадра
25 дисплейного процессора проходит аналогично первому варианту устройства.
Режим прогнозирования объекта с помощью оптоэлектронных блоков в реальном времени для этого варианта устройства проходит следующим образом. С выходов блока 48 фотоэлектрических преобразователей напряжения поступают на вход дифференцирующего узла 52. Приходящие от блока 48 напряжения X
(t,.
-2
ta), где t
)
Ч 0
5
3
пространственные координаты, спектральная, соответствующие первому и третьему фотоэлектрическим преобразователям блока 48 (отсчет идет против часовой стрелки со стороны системы с переменным увеличением), поступают на сумматор 55 узла дифференцирования 52, напряжения х (t, + +ut,, tj, t,), X (t,,t2 + ut, t), соответствующие второму и четвертому фотоэлектрическим преобразователям, поступают на блок 55 через усилители 56, умножающие входное напряжение на (-1). На выходе блока 55 формируется приращение по пространственным координатам у (t,,tj,t3) X (t,-«-bt, , t -i-utj, t,) - X (t,, tj+ Д tj, t,) - X (t,+ at, , t, + 5 + X (t,jtj, tj), которое поступает на вход коммутатора 53. В результате вращения подвижного диска блока 58 управления коммутатора 53, свя- .занного через редуктор с валом бло0
17
ка 17, на выходах фотоэлектрических преобразователей неподвижного диска появляются импульсы, временное расстояние между кЬторыми соответствует расстоянию между спектральными составляющими. Эти импульсы подаются на входы электронных ключей 57 и последовательно их отпирают, В результате отсчетные значения у (t, t , ta)
в отсченых
точках (k-l)u.t (k 1,r), соответствующие г спектральным компонентам, подаются соответственно на первый вход умножителей 36, 37 и 38 блоблока 54. С выходов этих умножителей . 15 содержит блок согласования, входы
напряжения произведений констант Sg, 87, Sg; (i 2, r-1), поступающих из мини-ЭВМ, на отсчетные .значения подаются на интегратор 59, где накап-
ливаются, в результате чего формируется напряжение F, С второго входа блока 49 на интегратор 59 в моменты окончания элемента изображения с выхода синхронизатора 12 поступают импульсы гашения. Эти импульсы поступают на вход схемы установки нулевых начальных условий блока 59 (эта схема представляет собой, например, электронный ключ, отпирающийся в момент прихода импульса с блока 12.. Электронный ключ замыкает накопительный элемент, например конденсатор, устанавливая нулевые начальные условия). Дальнейшие преобразования в блоке 54 аналогичны блоку 33. Напряжение Р оценки вероятности нахождения объекта подается через четвертый вход блока 50 на вход второго ан .аналого-цифрового преобразователя, входящего в блок 50, а на его другой вход поступают синхронизирующие импульсы с блока 12 через первый вход блока 50, обеспечивающие его работу. Аналогичные напряжения поступают на преобразователь блока 11, что обеспечивает контроль результатов прогнозирования с помощью дисплейного
процессора 13.
Формула изобретения
1. Устройство для считывания и обработки изображений объектов, содержащее фокусирующую систему, входы которой подключены к соответствующим выходам блока управления и оптически связаны с одним выходом блока сканирования и с входами матрицы оптических преобразователей, выходы которых оп-
040918
тически связаны с входами соответствующих расншрителей, аналого-цифровой преобразователь, выход которого подключен к входу блока регистрации, интерференционные фильтры, входы которых оптически связаны с выходами соответствующих расширителей, а выходы оптически связаны с входами со.ответствующих фотоэлектрических пре- fO образователей, выходы которых под ключены к соответствующим входам блока суммирования, о т л и ч а ю- щ е е с я тем, что, с целью повышения быстродействия устройства, оно
группы которого подключены к выходу соответствующих фотоэлектрических преобразователей, а вьгход соединен с одним входом блока суммирования, выход которого, подключен к одному входу блока согласования и к одному входу аналого-цифрового преобразовате-
5
0
5
0
0
5
динен с другим выходом блока сканирования, а выход подключен к другому входу блока согласования и к другому вхоДу аналого-цифрового преобразователя, входы группы которого Соединены с выходами соответствующих фотоэлектрических преобразователей, и вычислительные блоки, входы и выхо- ды которых подключены к соответствующим выходам и входам блока согласования.
2. Устройство для считывания и обработки изображений объектов, содержащее фокусирующую систему, входы которой соединены с соответствующими выходами блока управления и оптически связаны с одним выходом первого блока сканирования, фотоэлектрические преобразователи, выходы которых подключены к соответствукщим входам блока суммирования, аналого-цифро- 5 вой преобразователь, вьгход которого соединен с входом блока регистрации, отличающееся тем, что, с целью повышения быстродействия устройства, оно содержит синхронизаторы, входы которых соединены с соот- ветствукицими выходами первого блока сканирования, а выходы подключены к первому и второму входам аналого-цифрового преобразователя, блок согласования, входы которого соединены с выходами синхронизаторов и блока суммирования, а вьгход подключен к одному входу блока суммирования, другие входы которого соединены с
19
соответствую1ци1 и выходами первого блока сканирования и первого синхронизатора, вьтислительные блоки, входы и выходы которых подключены к соответствующим выходам и входам блока согласования, и второй блок сканирования, один.вход которого соединен с соответствзтащим выходом первого блока сканирования, другой оптически связан с выходом фокусирующей системы, а выход оптически связан с входами фотоэлектрических преобразователей, выход одного из которых подключен к соответствующему входу блока согласования и к третьему входу аналого-цифрового преобразователя, четвертьй вход которого соединен с выходом блока суммирования.
3, Устройство по п, 1, отличающееся тем, что блок сум-
tO )5
128040920
мирования содержит последовательно соединенные узел дифференцирования, входы которого являются входами группы блока, и узел определения вероятностей, другой вход которого является входом блока, а выход является выходом блока.
4. Устройство по п.2, отличающееся тем, что блок суммирования содержит последовательно соединенные узле дифференцирования, входы которого являются входами группы блока, коммутатор, другой вход которого является первым входом блока, и узел определения вероятности, другие входы которого являются вторым и третьим входами блока, а выход является выходом блока.
Фи.7
J5.1 7
J5I J
фиё.2
S6 55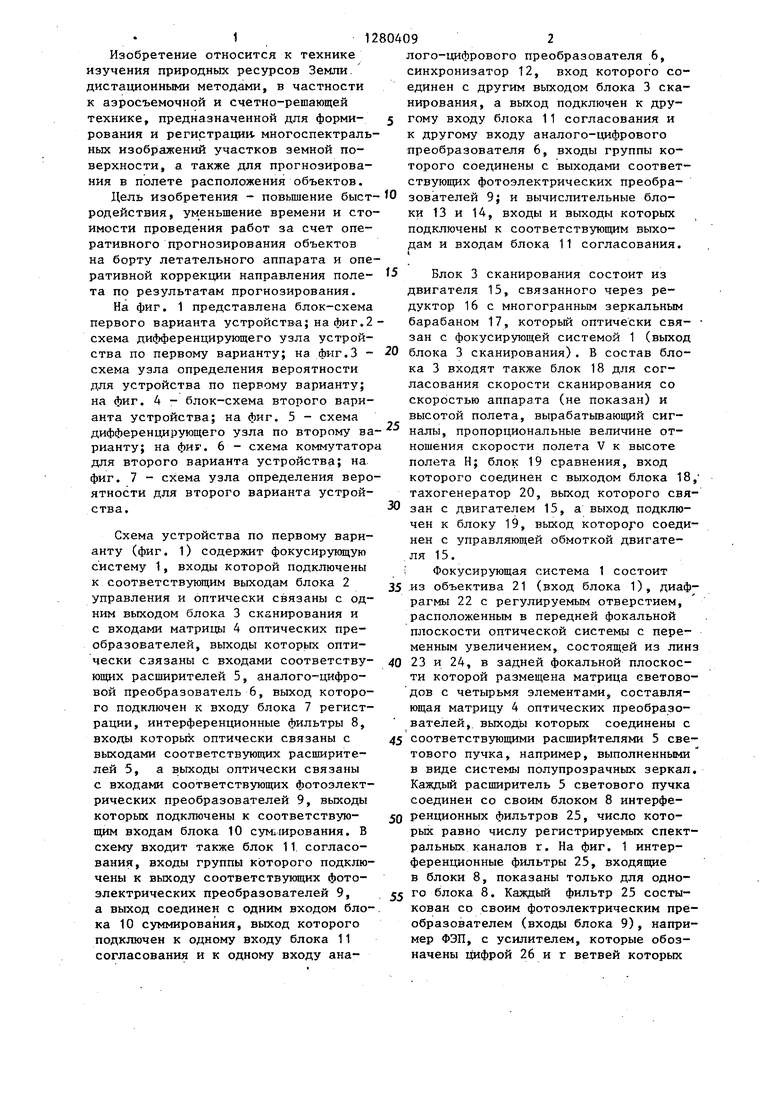

| название | год | авторы | номер документа |
|---|---|---|---|
| Аэросъемочная камера для регистрации многоспектральных изображений | 1982 |
|
SU1040622A1 |
| Устройство для центрирования изображений объектов | 1990 |
|
SU1836697A3 |
| Устройство для ввода изображений в электронно-вычислительную машину | 1982 |
|
SU1019432A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1425737A1 |
| Устройство для считывания изображений объектов | 1988 |
|
SU1541641A1 |
| Устройство для измерения индикатрис рассеяния света | 1988 |
|
SU1603255A1 |
| ОРТОГОНАЛИЗАТОР КВАДРАТУРНЫХ СОСТАВЛЯЮЩИХ СИГНАЛА | 1987 |
|
SU1840023A1 |
| Устройство для измерения индикатрис рассеяния света | 1987 |
|
SU1481649A1 |
| Акустооптоэлектронный спектроанализатор | 1988 |
|
SU1613971A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 1990 |
|
SU1823773A1 |

Изобретение относится к автоматике, в частности к устройствам для считьтания и обработки изображений объектов, и может быть использовано для формирования и регистрации многоспектральных изображений учйстков земной поверхности. Цель изобретения состоит в повышении быстродействия устройства. Поставленная цель достигается путем ускорения процесса изучения состояния объектов за счет совмещения одной из самых сложных процедур обработки изображений с процессом формирования изображения объектов. Благодаря этому задача считывания и обработки изображений решается в реальном ма сштабе времен с коррекцией направления полета по результатам прогнозирования. 2 с.и 2 з.п, ф-лы. 7 ил. W ю 00
Редактор М. Дылын
Составитель А, Романов
Техред В.Кадар Корректор С. Черни
Заказ 7053/44 Тираж
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
| Патент США № 3863218, кл | |||
| Способ отопления гретым воздухом | 1922 |
|
SU340A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Аэросъемочная камера для регистрации многоспектральных изображений | 1982 |
|
SU1040622A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
