Изобретение относится к технике телевидения и может быть использовано для определения координат объекта.
Цель изобретения - повышение точности определения координат объекта.
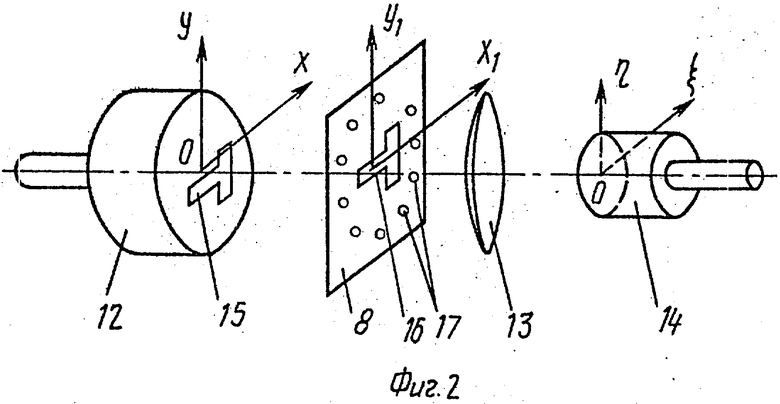
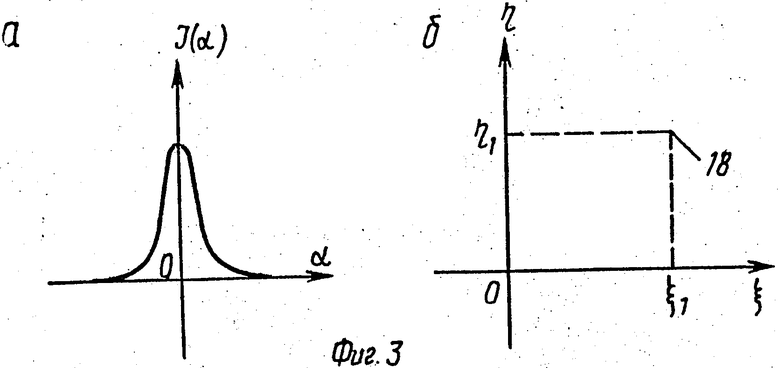
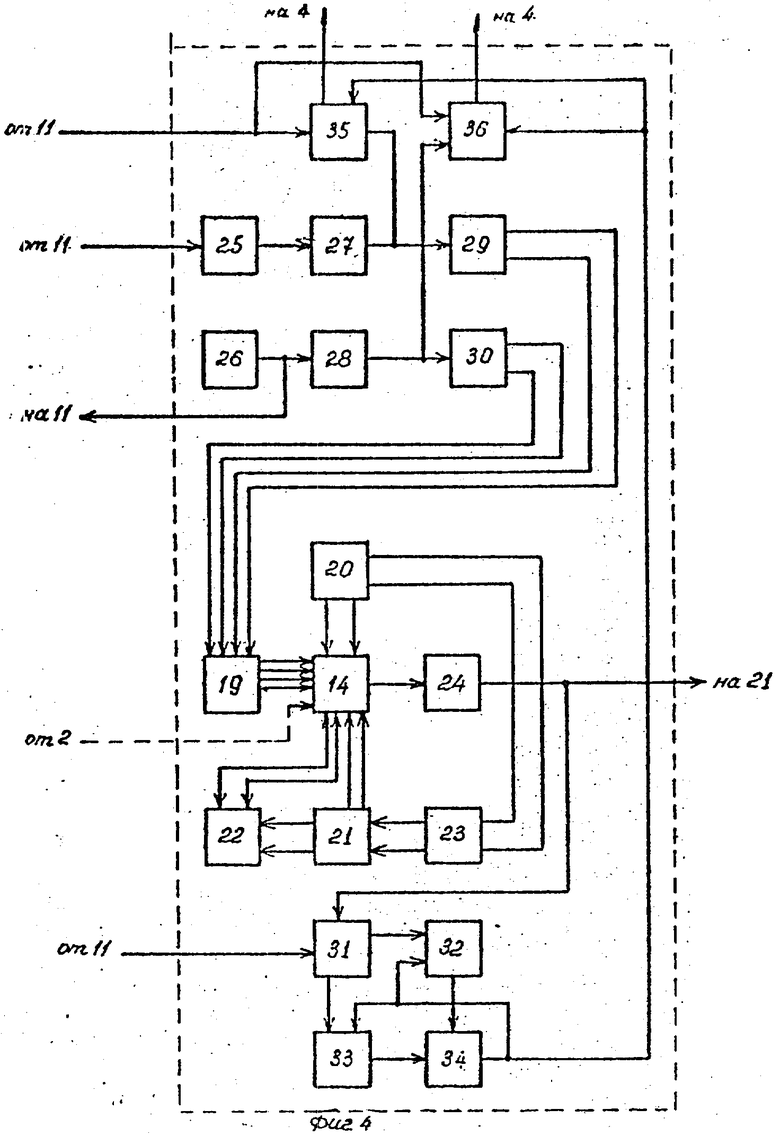
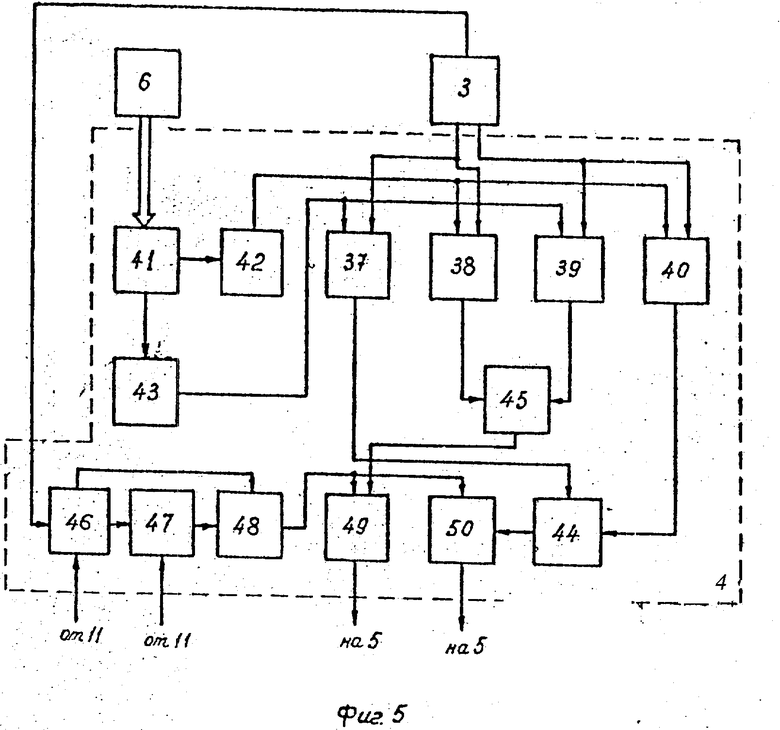
На фиг. 1 представлена электрическая структурная схема устройства для определения координат объекта; на фиг. 2 - оптического коррелятора; на фиг. 3 - изображение реализации взаимно-корреляционной функции и системы координат, связанной с плоскостью изображения; на фиг. 4 - блок сканирования; на фиг. 5 - преобразователь координат; на фиг. 6 - блок оценки координат; на фиг. 7 - блок поворота и блок совмещения; на фиг. 8 - стабилизатор скорости вращения; на фиг. 9 - интегратор; на фиг. 10 - временные диаграммы работы интегратора и компаратора; на фиг. 11 - временные диаграммы работы формирователя импульсов; на фиг. 12 - пикового детектора; на фиг. 13 - триггера; на фиг. 15 - синхронизатора; на фиг. 17 - временная диаграмма одного цикла работы устройства для определения координат объекта.
Устройство для определения координат объекта (фиг. 1) содержит датчик 1 текущего изображения (ДТИ), оптический коррелятор 2, блок 3 сканирования, преобразователь 4 координат, блок 5 оценки координат, блок 6 поворота, блок 7 совмещения, блок 8 эталонного изображения, датчик 9 угла, стабилизатор 10 скорости вращения, синхронизатор 11. Оптический коррелятор 2 (фиг. 2) содержит электронно-лучевую трубку (ЭЛТ) 12, линзу 13, телевизионную передающую трубку (ТПТ) 14, кроме того, на фиг. 2 представлены текущие изображения 15, а также блок 8 эталонного изображения с содержанием объекта 16 и отверстий 17.
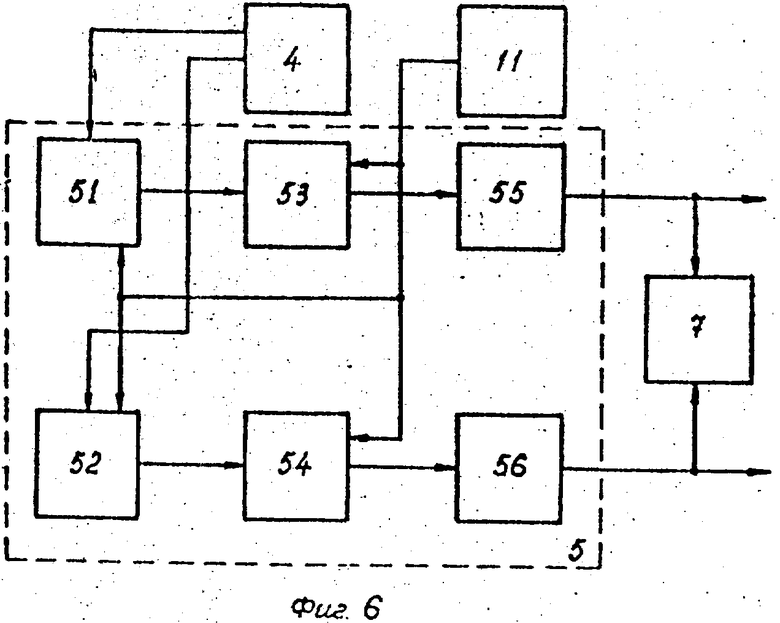
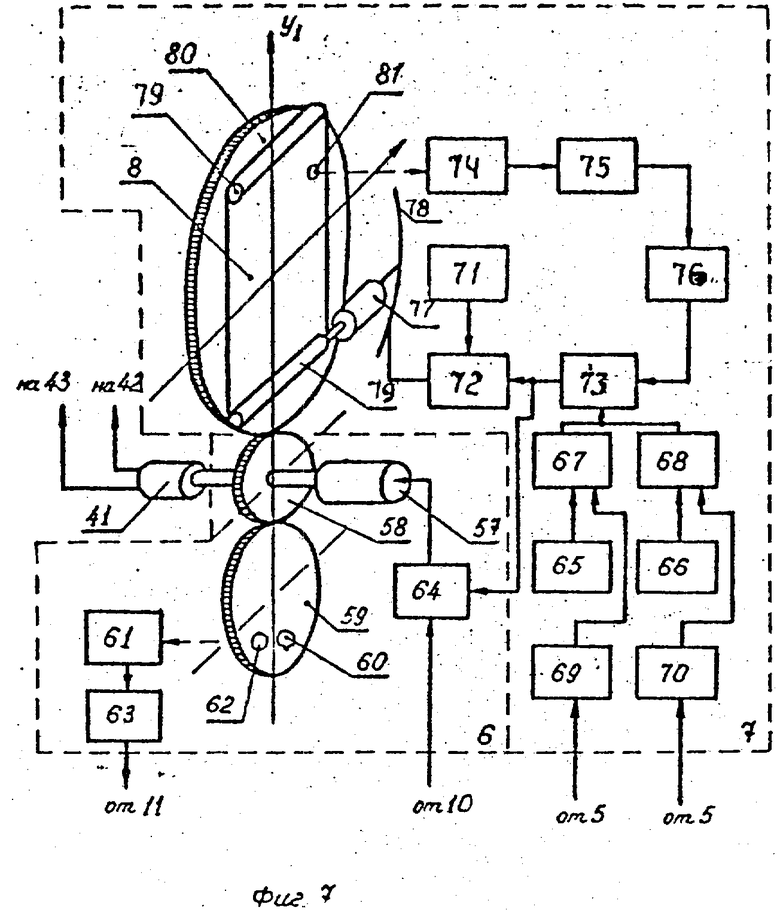
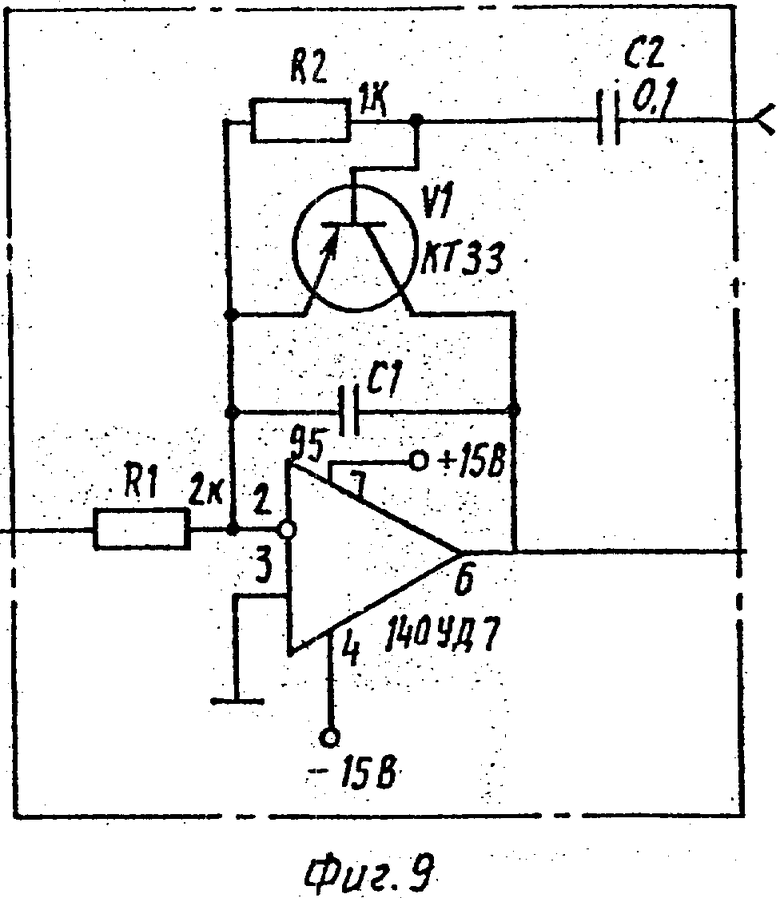
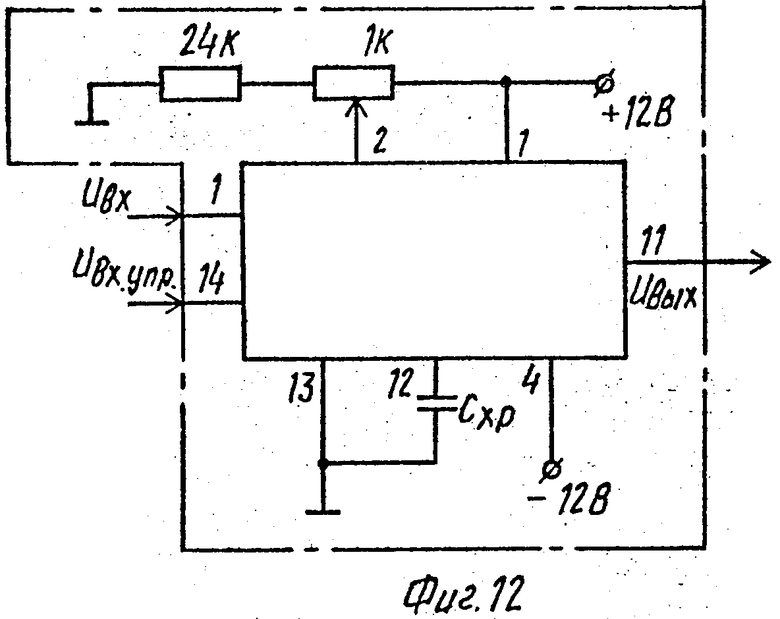
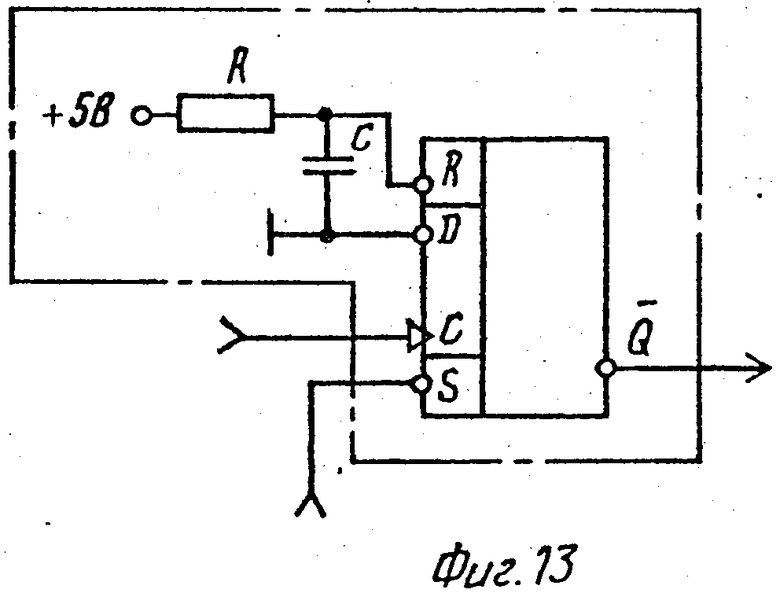
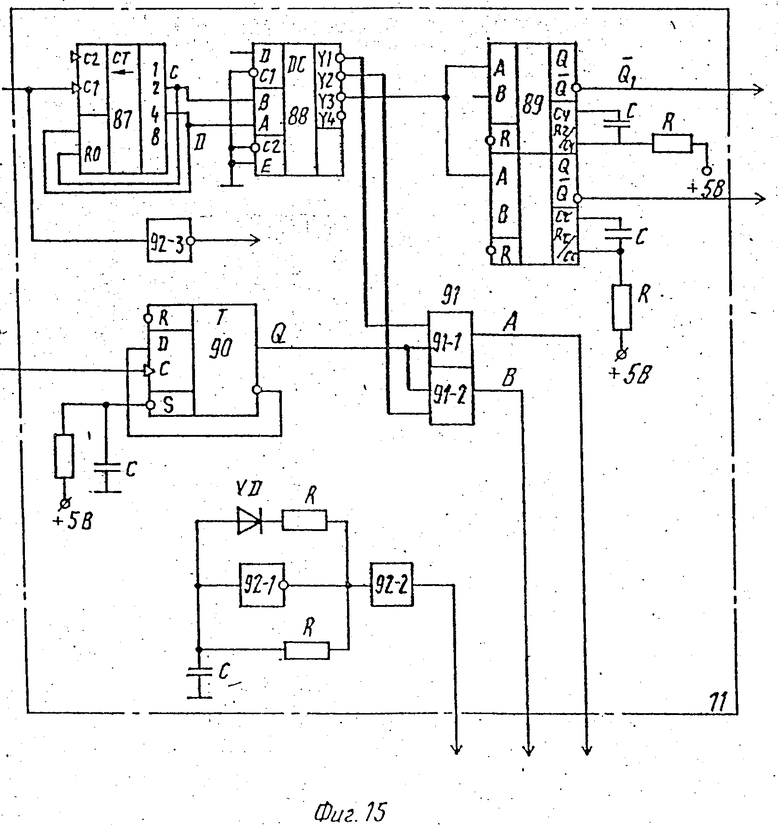
В системе координат (фиг. 3б) представлена наиболее яркая точка 18 с координатами η1,ξ1; на фиг. 3а - выходной сигнал с выхода видеоусилителя 24. Блок 3 сканирования (фиг. 4) содержит строчно-кадровую отклоняющую катушку 19, фокусирующую катушку 20, делители 21, 22 напряжения, источник 23 питания, видеоусилитель 24, счетчик 25 строк, счетчик 26 кадров, аналого-цифровые преобразователи (АЦП) 27, 28, усилители 29, 30, ключ 31, пиковые детекторы 32, 33, блок сравнения 34, блоки 35, 36 памяти. Преобразователь 4 координат (фиг. 5) содержит умножители 37 - 40, датчик 41 угла, фазовые детекторы 42, 43, блок 44 вычитания, сумматор 45, ключ 46, пиковый детектор 47, блок 48 сравнения, ключи 49, 50. Блок 5 оценки координат (фиг. 6) содержит блоки 51, 52 памяти, ключи 53, 54, блоки 55, 56 масштабирования. Блок 6 поворота (фиг. 7) содержит двигатель 57, шестерню 58 редуктора, диск 59, источник 60 света, фотоэлемент 61, отверстие 62, усилитель 63, коммутатор 64, задатчик 65, 66 опорного напряжения, блоки 67, 68 сравнения, блоки 69, 70 выделения модуля сигнала, источник 71 питания, ключ 72, триггер 73, фотоэлемент 74, усилитель 75, одновибратор 76, двигатель 77, скользящие контакты 78, пленку 79 с эталонным изображением, рамку 80, отверстие 81. Стабилизатор 10 скорости вращения (фиг. 8) содержит формирователь 82 импульсов, интегратор 83, компаратор 84, источник 85 опорного напряжения, усилитель 86. Синхронизатор 11 (фиг. 15) содержит счетчик 87, дешифратор 88, одновибратор 89, триггер 90, инверторы 91-1,91-2, генераторы 92-1, 92-2, 92-3 импульсов.
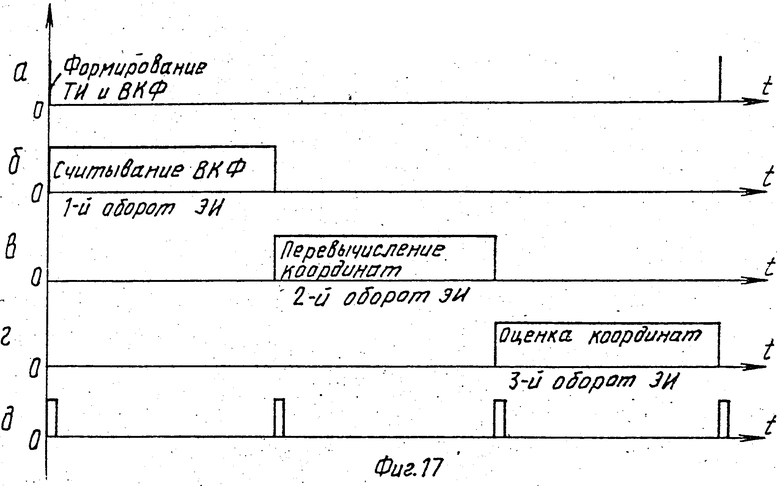
Работает устройство для определения координат объекта следующим образом. Его работа осуществляется циклически (фиг. 17 а, б, в, г, д). На очередном цикле работы устройства датчиком 1 формируется текущее изображение (ТИ) объекта, которое вместе с эталонным изображением (ЭИ) вводится в оптический коррелятор 2, формирующий взаимно-корреляционную функцию между ТИ и ЭИ. Причем блок 8 вращается вокруг оптической оси коррелятора 2 с постоянной скоростью ω. Постоянство скорости вращения блока 8 обеспечивается стабилизатором 10 скорости вращения, использующего сигналы датчика 9 угла. Для формирования сигналов датчиком 9 угла блок 8 содержит отверстия, расположенные по окружности изображения. При вращении блока 8 отверстия совмещаются с источником 60 света и фотоэлементом 61 датчика 9 угла, в результате чего на выходе фотоэлемента 61 формируется сигнал. Стабилизатор 10 скорости вращения эталонного изображения путем сравнения сигналов, снимаемых с датчика 9 угла, и опорного сигнала, значение которого устанавливается заранее, регулируют скорость вращения блока 8. Блок 3 сканирования преобразует оптическое изображение взаимно-корреляционной функции в последовательность электрических сигналов. То есть, с блока 3 сканирования снимается видеосигнал, амплитуда которого пропорциональна угловому развороту ТИ и ЭИ, и напряжение с разверток по строке и по кадру (при строчно-кадровой развертке), соответствующие координатам точки наибольшей освещенности на фотокатоде. Указанные сигналы преобразуются преобразователем 4 координат и анализируются блоком 5 оценки координат. Сигналы с выхода блока 5 оценки координат поступают через блок 7 совмещения в блок 6 поворота, который осуществляет вращение блока 8 вокруг оптической оси коррелятора 2. Критерием совмещения ТИ и ЭИ по углу служит экстремальное значение взаимно-корреляционной функции (ВКФ). После оценки угловой координаты производится совмещение изображений по линейным сдвигам. Пусть хоу, х1, 01, У1 ξOη-системы координат (СК), связанные соответственно с ТИ, с ЭИ и плоскостью фотокатода блока 3. Из анализа работы оптического коррелятора 2 следует, что если угол между ЭИ и ТИ равен нулю, то а, в - сдвиги ТИ по осям 01х1, 01y1; {x1o, у1o, x1o, у1o} - координаты совпадающих элементов ТИ и ЭИ и координаты максимума связаны соотношениями

где f - фокусное расстояние интегрирующей линзы оптического коррелятора 2;
t - расстояние между ТИ и ЭИ.
Если ТИ повернется на угол ϕ, то максимум ВКФ достигается при развороте блока 8 на тот же угол ϕ, а линейные координаты максимума ВКФ на неподвижном фотокатоде сканирующего блока 3 определяются выражениями
ξ1= ξcosϕ-ηsinϕ,
η1= ηcosϕ-ξsinϕ.
Если плоскость ξOη была повернута на угол ϕ, то в этом случае координаты главного максимума ВКФ определялись по (1) и (2). При неподвижной сканирующей блока 3 линейные координаты будут определяться с ошибками
Δξ = ξ-ξ1 = ξ(1-cosϕ)+ηsinϕ. (3)
Δη = η-η1 = η(1-cosϕ)-ξsinϕ. (4)
Ошибки будут нулевыми, если в (5) и (6) вместо ξ1,η1 будут стоять некоторые величины ξ2,η2. Приравнивая (3) и (4) к нулю и анализируя эти выражения, получим, что ξ2,η2 должны иметь следующий вид:
ξ2 = η1sinϕ-ξ1cosϕ,
η2 = η1cosϕ+ξ1sinϕ.
Для перечисленных величин уже
Δξ = ξ-ξ2 = 0, Δη = η-η2 = 0.
Физически сигналы ξ2,η2 представляют собой функцию, зависящую от ϕ и вида развертки сканирующего блока 3. Для оценки координат главного максимума ВКФ (несущих информацию о координатах объекта) величины ξ1,η1 поступают на входы блока 5. Необходимость преобразователя 4 обуславливается тем, что в известном устройстве взаимные сдвиги ξ1,η1 изображений определяются в системе координат ХОУ, связанной с ТИ, так как при вращении блока 8, не имеющего жесткой связи с плоскостью регистрации ВКФ, координаты определяются с ошибкой. Сигналы ξ2,η2,ϕ с выходов блока 5 и блока 6 поворота используются, например, роботом-манипулятором для захвата объема и выполнения заданной последовательности технологических операций. Синхронизатор 11 обеспечивает заданную последовательность работы блоков устройства. На этом один цикл работы устройства заканчивается. Следующий цикл начинается снова по сигналу от синхронизатора 11.
Блок 3 сканирования работает следующим образом. С помощью отклоняющей системы, состоящей из строчно-кадровой отклоняющей катушки 19 и фокусирующей катушки 20, обеспечивается строчно-кадровое сканирование считывающего луча ТПТ 14. Делители напряжения 21 и 22 делят напряжение, обеспечивающее необходимый режим работы ТПТ 14. Источник 29 питания 23 формирует необходимые напряжения. Видеосигнал с выхода ТПТ 14 поступает в видеоусилитель 24. Тактовые импульсы синхронизатора 11 поступают на вход счетчика строк 25. Счетчик 25, АЦП 27, усилитель 29 образуют канал строчной развертки, а счетчик 26, АЦП 28, усилитель 30 - канал кадровой развертки. Счетчики 26 и 25 считывают входные импульсы. При этом счетчики 25 и 26 не нуждаются в подведении сигнала "сброс". С помощью АЦП 27 и 28 формируются пилообразные сигналы, усиливаемые усилителями 29 и 30. Каждый усилитель 29 и 30 имеет по два выхода, поскольку каждая катушка (строчная и кадровая) имеет по два входа. Аналоговые сигналы с АЦП 27 и 28 поступают в блоки 35 и 36, осуществляющие запоминание значения пилообразного напряжения, пропорционального линейным координатам наиболее яркой точки в плоскости фотокатода ТПТ 14. Блоки 35 и 36 управляются синхронизатором 11 (сигнал сброса) и блоком 34 сравнения (сигнал записи). Входной сигнал поступает на вход ключа 31, который ξ1,η1 подключает этот сигнал сначала ко входу пикового детектора 32, а затем ко входу пикового детектора 33. Работа ключа 31 синхронизируется синхронизатором 11 таким образом, что за первый кадр развертки, обеспечиваемой ТПТ 14, видеосигнал поступает на пиковый детектор 32, а за второй кадр - на пиковый детектор 33. Пиковые детекторы 32 и 33 запоминают наибольшее значение видеосигналов (т.е. ВКФ) за предыдущий и текущий кадры. При равенстве входных сигналов пиковых детекторов 32 и 33 блок 34 вырабатывает импульс сравнения, управляющий работой блоков 35 и 36. Сброс пиковых детекторов 32 и 33 осуществляется по выходному сигналу блока 34.
Преобразователь 4 работает следующим образом. С выходов блока 3 на умножители 37 - 40 поступают сигналы, характеризующие величины ξ1,η1 С выхода блока 6 поворота информация об угловом положении блока поступает в датчик 41 угла, выполненный в виде синусно-косинусного вращающего трансформатора. С первого и второго выходов датчика 41 угла сигналы, пропорциональные соответственно величинам sinϕ и cosϕ, поступают в фазовые детекторы 42 и 43, которые выделяют огибающую переменного напряжения указанных сигналов. Далее сигнал, пропорциональный величине sinϕ, поступает с выхода фазового детектора 43 на входы умножителей 37 и 39, а сигнал, пропорциональной величине cosϕ поступает с фазового детектора 42 на входы умножителей 38 и 40. В результате операции умножения с выходов умножителей 37 - 40 будут сниматься сигналы, пропорциональные величинам.
Сигналы с выходов умножителей 37 и 40 поступают на входы блока 44 вычитания, с выхода которого будет сниматься сигнал, пропорциональный величине ξ2 = η1sinϕ-ξ1cosϕ. Сигналы с выходов умножителей 38 и 39 поступают на входы сумматора 45, на выходе которого будет сигнал, пропорциональный величине η2 = η1cosϕ+ξ1sinϕ. Поскольку информация снимается при непрерывном вращении блока 8, то синхронизация схемы величин ξ2,η2 осуществляется следующим образом. Видеосигнал от блока 3 подается на вход ключа 46, управляемого синхронизатором 11. Ключ 46 подключает выход блока 3 поочередно к пиковому детектору 47 и к блоку 48 сравнения. Пиковый детектор 47 запоминает наибольшее значение видеосигнала за первый кадр развертки, который поступает на первый вход блока 48 сравнения, на второй вход которого подается видеосигнал за второй кадр развертки. При развенстве этих сигналов блок 48 сравнения выдает импульс сравнения, управляющий работой ключей 49 и 50. При наличии импульса сравнения ключи 49 и 50 переводятся в состояние, пропускающее на входы блока 5 сигналы ξ2,η2, который работает следующим образом. Сигнал ξ2,η2 с выходов преобразователя 4 поступают на входы соответствующих блоков 51 и 52, запоминающих величины ξ2,η2, сигналы от блоков 51 и 52 снимаются с помощью ключей 53 и 54, управляемых сигналами синхронизатора 11. Затем сигналы ξ2,η2 пропускаются через соответствующие блоки 55 и 56 масштабирования и поступают в блок 7.
Блоки 6, 7 и 8 работают следующим образом. С помощью двигателя 57 через шестерню 58 производится вращение блока 8 и диска 59. Синхронно с вращением блока 8 и диска 59 производится поворот вала датчика 41. Скорость вращения двигателя 57 стабилизируется стабилизатором 10. При смене ЭИ с помощью синхронизатора 11 производится остановка вращения двигателя путем отключения коммутатора 64 сигналов управления от стабилизатора 10. Один оборот ЭИ соответствует одному обороту диска 59. Для подсчета числа оборотов блоков 8 используются импульсы, длительность интервалов между которыми соответствует одному обороту блока 8. Для формирования этих импульсов используется источник 60, фотоэлемент 61 и усилитель 63. При совмещении отверстия 62 с источником 60 фотоэлемент 61 вырабатывает сигнал, усиливаемый усилителем 63. Этот сигнал поступает в синхронизатор 11.
Смена кадра ЭИ осуществляется следующим образом. Сигналы, пропорциональные ξ2,η2, поступают в блоки 69 и 70, а затем - на первые входы блоков 67 и 68 сравнения, на вторые входы которых поступают опорные сигналы с задатчиков 65 и 66. При равенстве этих сигналов блоки 67 и 68 сравнения вырабатывают импульс, переводящий триггер 73 в состояние, при котором ключ 72 подключает источник питания 71 к двигателю 77. Двигатель 77 через соответствующий редуктор начинает перематывать пленку 79 с ЭИ со своей бобины на верхнюю. Перематывание пленки происходит до момента совмещения отверстия 81 с лампочкой, установленной в рамке 80 (на фиг. 7 лампочка не показана). При совмещении этой лампочки с отверстием 81 фотоэлемент 74 вырабатывает импульс, усиливаемый усилителем 75. Сигнал усилителя 75 поступает в одновибратор 76, вырабатывающий сигнал сброса для триггера 73 и синхронизатора 11. Сигнал сброса возвращает триггер 73 в исходное состояние и перемотка пленки 79 заканчивается. Далее в случае необходимости начинается вращение блока 8.
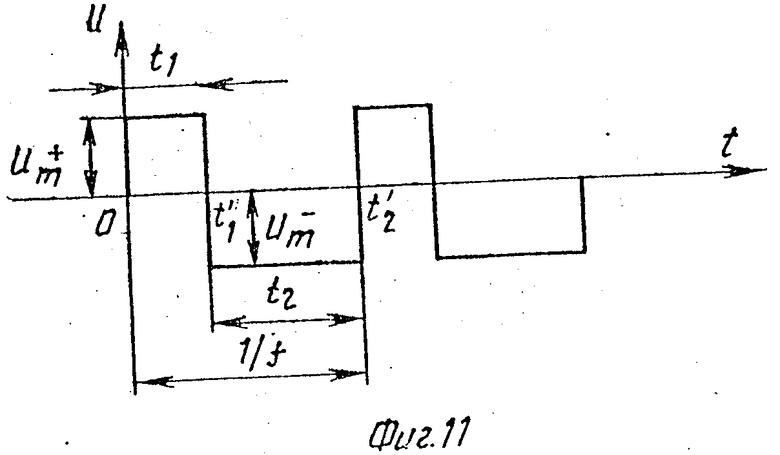
Стабилизатор 10 скорости вращения работает следующим образом. С помощью датчика 9 угла снимается сигнал, который подается на формирователь импульсов 82, формирующий прямоугольные импульсы. Эти импульсы интегрируются интегратором 83, значение выходного сигнала которого пропорционально скорости вращения блока 8. Выходной сигнал интегратора 83 сравнивается компаратором 84 с опорным сигналом, поступающим с источника 85 опорных напряжений. В случае различия входных сигналов компаратор 84 вырабатывает сигнал, который через усилитель мощности 86 и блок 6 поворота управляет вращением блока 8.
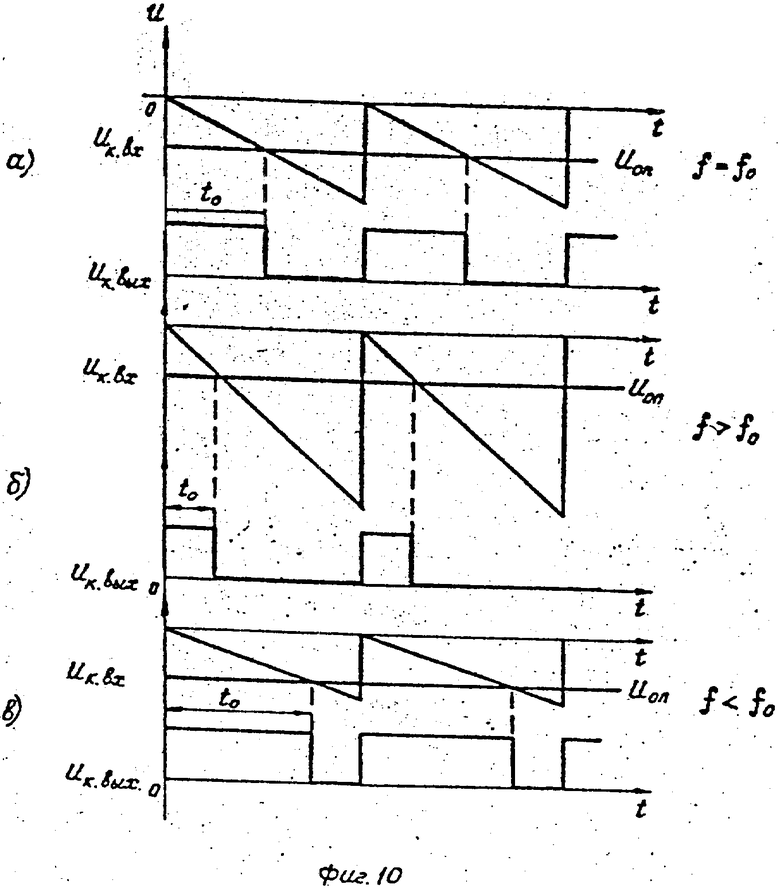
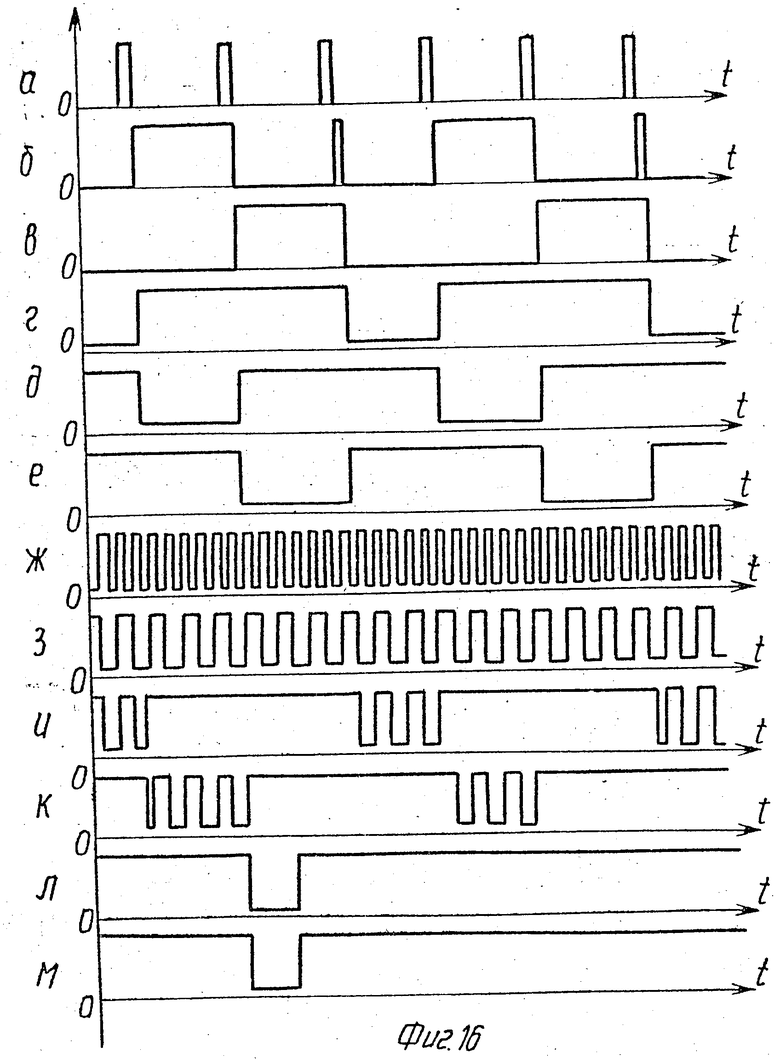
Работа интегратора 83 и компаратора 84 поясняется на диаграмме, представленной на фиг. 10, где на фиг. 10а показан сигнал на входе (Uквх) и на выходе (Uхвых) компаратора 84 при частоте вращения ЭИ f = fo. На фиг. 10б показан сигнал на выходе (Uквх) и выходе (Uквых) компаратора 84 при частоте вращения ЭИ f>fo. На фиг. 10в показан сигнал на входе (Uквх) и на выходе(Uквых) компаратора 84 при частоте вращения ЭИ f<fo, где fo - требуемая частота вращения ЭИ; Uоп - опорное напряжение, соответствующее fo. Данные графики иллюстрируют изменения сигнала на выходах интегратора 83 и компаратора 84 при изменении частоты вращения ЭИ. Действительно, компаратор 84 в момент достижения пилообразного напряжения с опорным Uоп вырабатывает соответствующий сигнал (Uквых). В результате на выходе компаратора 84 получается сигнал частоты F, промодулированный по скважности т.е. широтно-модулированный сигнал. Усилитель 8, работающий в ключевом режиме, включается в промежуток времени, который меняется в зависимости от частоты вращения ЭИ. Чем больше частота вращения, тем меньше время to и наоборот. Как следует из графиков, скорость нарастания пилообразного напряжения на выходе интегратора 83 пропорциональна скорости вращения ЭИ. В то же время компаратор 84 сравнивает опорное напряжение Uоп с текущим значением пилообразного напряжения.
Синхронизатор 11 работает следующим образом. С помощью счетчика 87 и дешифратора 88 обеспечивается подсчет числа оборотов ЭИ. На выход счетчика 87 поступают импульсы с выхода усилителя 63 (фиг. 16а), каждый из которых свидетельствует об окончании одного оборота ЭИ. Счетчик 87 подсчитывает эти импульсы и формирует на выходах сигналы (фиг. 16б,в), соответствующие числу поступивших импульсов в двоичном коде. При поступлении третьего импульса счетчик сбрасывается и счет начинается снова. Сигналы со счетчика 87 поступают на дешифратор 88, который вырабатывает сигналы (фиг. 16г, д, е), поступающие на выходы ключа 91. Сигнал ϕ3 поступает на вход одновибратора 89, вырабатывающего сигналы сброса интегратора 83 и пикового детектора 47 (фиг. 16а), а также для сброса блоков 51, 52 и управления ключами 53, 54 (фиг. 16м). Триггер 90, используя сигналы счетчика 26 (фиг. 16ж) по окончании каждого кадра ТПТ 14, формирует сигнал управления ключами 91-1, 91-2 (фиг. 16з). Ключи 91-1, 91-2 управляют (фиг. 16и,к) в свою очередь ключами 31 и 46. При этом управление ключами 31 и 46 происходит таким образом, что при четном кадре ключ 31 соединяет выход видеоусилителя 24 со входом пикового детектора 32 и ключ 46 соединяет выход видеоусилителя 24 со входом пикового детектора 47, а при нечетном кадре ключ 31 соединяет выход видеоусилителя 24 со входом пикового детектора 33 и ключ 46 соединяет выход видеоусилителя 24 со входом блока сравнения 48. Генератор 92-2 формирует импульсы синхронизации строчной развертки (с частотой 1 кГц), поступающие на вход счетчика 25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания и определения координат объекта манипулирования в рабочей зоне робота | 1985 |
|
SU1370639A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЛНОВЫХ АБЕРРАЦИЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2020 |
|
RU2753627C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2020 |
|
RU2754087C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2478211C1 |
| Устройство для определения импульсных характеристик линейных объектов | 1983 |
|
SU1136114A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| Устройство для определения координат объекта манипулирования в рабочей зоне робота | 1990 |
|
SU1740150A1 |
| Компенсационный акселерометр | 2018 |
|
RU2676177C1 |
| Адаптивное устройство поиска широкополосного сигнала | 1986 |
|
SU1453601A2 |
| Устройство для измерения перемещения объектов | 1974 |
|
SU563743A1 |


Изобретение относится к технике телевидения и может быть использовано для определения координат объекта. Сущность изобретения: устройство содержит датчик 1 текущего изображения, оптический коррелятор 2, блок 3 сканирования, преобразователь 4 координат, блок 5 оценки координат, блок 6 поворота, блок 7 совмещения, блок 8 эталонного изображения, датчик 9 угла, стабилизатор 10 скорости вращения, синхронизатор 11. 1-2-3-4-5-7-6-8-9-10-6-11-10. 17 ил.
Устройство для определения координат объекта, содержащее последовательно соединенные датчик текущего изображения, оптический коррелятор и блок сканирования, а также последовательно соединенные блок оценки координат, блок совмещения, блок поворота и блок эталонного изображения, второй вход которого соединен с вторым выходом блока совмещения, а первый выход блока эталонного изображения оптически связан с вторым входом оптического коррелятора, а также синхронизатор, первый вход которого соединен с вторым выходом блока поворота, а первый выход синхронизатора соединен с первым входом блока оценки координат, выходы которого являются выходами устройства для определения координат объекта, при этом третий выход блока поворота соединен с соответствующим входом блока совмещения, отличающееся тем, что, с целью повышения точности определения координат объекта, в него введены датчик угла, стабилизатор скорости вращения и преобразователь координат, первый вход которого соединен с вторым выходом синхронизатора, а третий, четвертый и пятый выходы синхронизатора соединены соответственно с вторым, третьим и четвертым входами блока сканирования, первый выход которого соединен с вторым входом синхронизатора, при этом датчик угла оптически связан с вторым выходом блока эталонного изображения, а выход датчика угла соединен с первым входом стабилизатора скорости вращения, второй вход которого соединен с шестым выходом синхронизатора и вторым входом преобразователя координат, а выход стабилизатора скорости вращения соединен с вторым входом блока поворота, выход которого соединен с третьим входом преобразователя координат, четвертый, пятый и шестой входы преобразователя координат соединены выходами блока сканирования, а первый и второй выходы преобразователя координат соединены соответственно с вторым и третьим входами блока оценки координат.
| Белоглазов И.Н., Тарасенко В.Н | |||
| Корреляционно-экстремальные системы | |||
| - М.: Советское радио, 1974, с.211. |
