Изобретение относится к медицинской , а именно к протезам нижних конечностей, и предназначено для протезирования инвалидов, перенесших операцию вычленения бедра.
Целью изобретения является облегчение ходьбы для инвалидов с вычлененным бедром.
На фиг. 1 представлен первый вариант протеза нижней конечности (с частичными )азреза.ми) в сборе с полукорсетом для инвалидов с массой, тела, превышающей сред- массу человека (штрих-пунктирами показаны положения искусственной конечности при ходьбе и при сидении), вид сбоку; на фиг. 2 то же, вид сзади; на фиг. 3 - гильза бедра, вид сверху; на фиг. 4 - положение стопы здоровой конечности в моментах становления протезированной конечности после )еднего толчка на всю стопу, для засасывания воздуха из атмосферы механическим , ги уумным насосом в подошвенной части обуви; на фиг. 5 - то же, в моментах зад,- исго толчка протезируемой конечности для уд.ч.К иик засосанного воздуха; на фиг. 6 - И) «е, вид сзади; на фиг. 7 - ходьба с ис- ;10„1ьзованне.м предлагаемого протеза, буква- м г алфавита обозначены фазы двойного ша- : ri на протезе (звенья последнего в отличие от здоровой конечности расчленены); на фиг 8 -- ппевмогидравлическая схема функ- иионироваиия протеза; на фиг. 9 - конструкция поворотного распределителя потоков, управляемого от зубчатой пары двусторонней связи; на фиг. 10 -- электросхема управления средствами сообщения и противодействия при падении; на фиг. 11 - вто- jhiH вариант исполнения пружинного цикли- ч , накопителя потенциальной и кине- Tii iecKoA энергий с использованием ленточ- пой спиральной пружины (для инвалидов с массой тела, не превышающей среднюю массу человека, вид сверху на гильзу бедра; на фиг. 12 - вид А на фиг. 11; на фиг. 13 - вид Б па фиг. 11; на фиг. 14 -шестибара- банный 1 егаторный-двигатель; нз фиг. 15 -- разрез В-В на фиг. 14; на фиг. 16 - разрез Г--Г на фиг. 14.
Протез нижней конечности по первому вариапту содержит искусственную стопу 1 (фиг. 1), устаповленную на сферическом шарнире 2 посредством пластин 3 голеностопного узла с трубчатой гильзой 4 голени, управляемой рычагом 5 с оппозитно фиксируемыми стяжками 6 и 7, узел 8 с цилиндрическим шарпиром 9 с циклоидаль- Hoii повер.хностью трепия, полукорсет 10, фиксируемый поясом 11, и гильзу 12 бедра, устаповленную на дуговую подвижную опору 13 с трением качения, с- возможностью перемещения в сагиттальной плоскости относительно полукорсета 10 но радиусу неподвижной оси 14, зафиксированной на полукорсете и расположенной против вертлуж
ной впадины в безымянной кости протезируемого.
На неподвижной оси 14 с трением качения на шарнирах 15,(фи1. 2 и 3) смонтированы посредством зйки 6 втулка-фланец 17 с передвижной фиксаторной вилкой 18 и поворотная тина 19, где установлены акку.мулирующая газовая полость 20, спаренные гидроцилиндры 21, з.).тросхема управления, соединенная с датчиками 22 и 23
положения стопы, быстродействующий электромагнит 24, а также четырехлинейный трехпозициопный диск - расггределитель 25 направлений гидроиотоков. Фиксаторная вилка 18 снабжена рукояткой 26. На втулкефланце 17 за ограничительным упором 27 посажена двухветвийная цилиндрическая виптовая пружина 28 кручения.
На дне гильзы 12 бедра {фиг. 1) смонтированы тандемный электропривод 29 с насосом 30 и гидробаком 31. Вблизи витка
ветви пружины 28 кручения, контактирующей с задней поверхностью гильзы 2 бедра, установлена дуга 32 зубчатого зацепления, взаимодействующая с зубчатым распределителем 25 направлений гидропртоков. При этом конец этой ветви жестко связан со спаренными норпшями гидроцилиндров 21 посредством блочной тяги 33, а конец другой ветви, контактирующей с передней поверхностью гильзы 12 бедра пружины 28 кручения, выполнен в виде огибающего якорь
электромагнита 24 упора 3-1 На задней боковой поверхности гильзы 2 бедра установлена спира. плоская пружина 35. Ее выходная лента 3G связана с задним плечом рычага 5. На наружной боковой поверхности туловища со стороны вычлепенного бедра, например, на поясе 1 i уста- повлепо в качестве сигнализатора средство сообщения о предстоящем возможном падении, выполненное, например, с ртутными выключателями, содержащими колбу 37, в которой ампулы 38 с ртутью па контактах
39 обращены в стороны возможного падения, а ампулы 40 с замыкающей цепь ртутью в сторону паиболыпей устойчивости проте- зируе.мого.
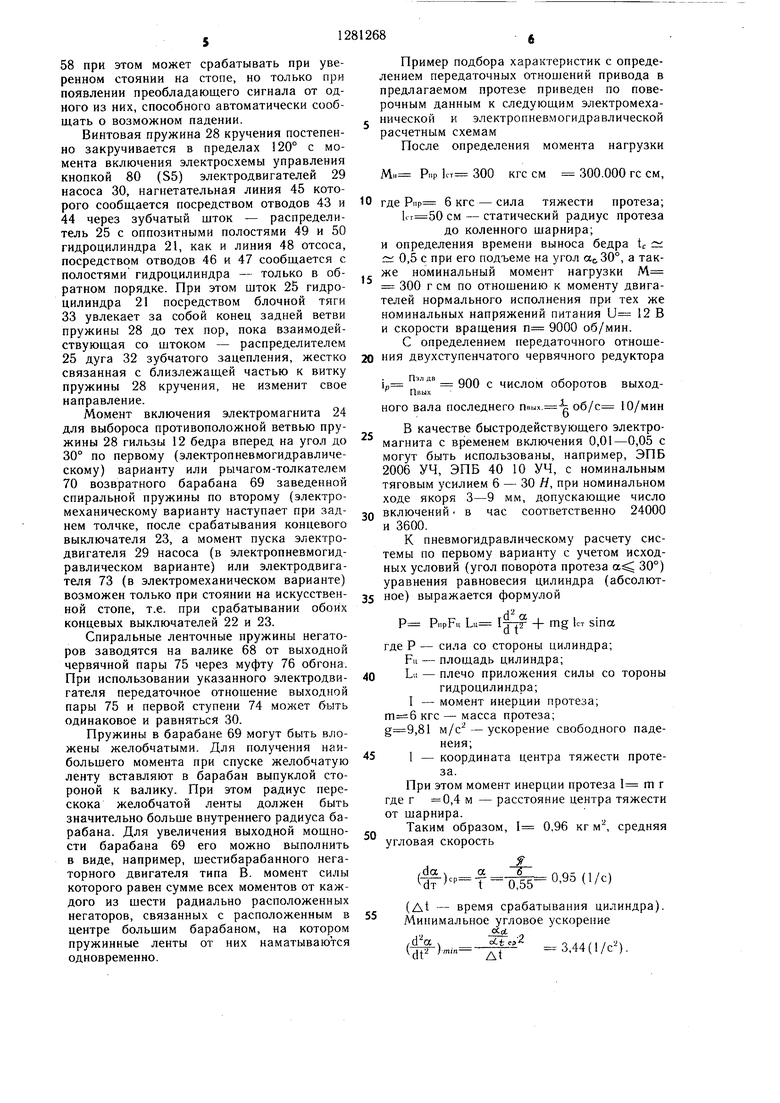
Рычаг 5 снабжен тормозной гайкой 41 (фиг. 2). Зубчатый ;пток -- распределитель 25 (фиг. 1 и 9) взаимодействует с притертой втулкой 42 н выпол;.5ен с перекрестными через 90 двумя парами кана.пов 43 и 44, соединенными г линией 35 нагнетания, и 46 и 47, соединенными с линией 48
отсоса, попеременно сообщаемых то с одними то с другими оппозитными полостями гидро- цилипдров 21, так что проходящие через диаметр каналы 43 и 47 с полостью 49, а каналы 44 и 46 - с полостью 50 спарепных гидроцилипдров 21, с поочередными сменами в них линий 45 нагнетания и 48 отсоса. Непосредственно за насосом 30 (фиг. 8) линия 45 нагнетания снабжена фильтром 51, а за ппев.могидроакку
мулятором 20 оснащена предохранительным клапаном 52, ограничивающим максимальное давление, например, с собственным управлением (прямого действия).
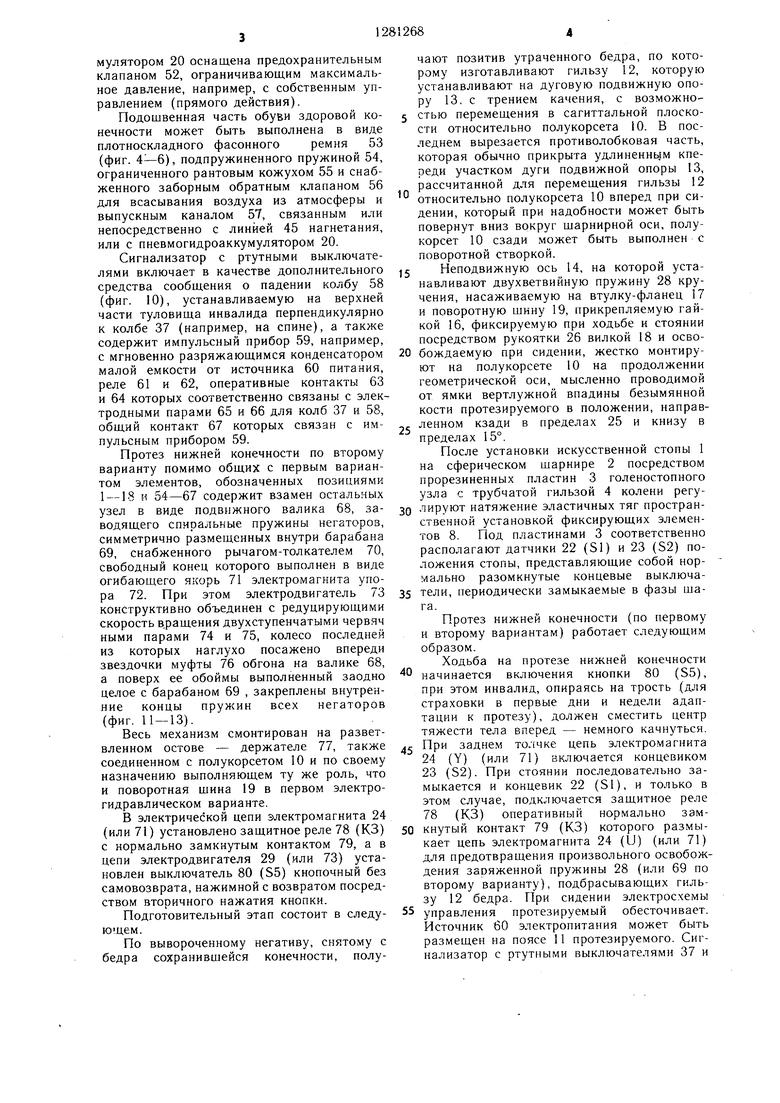
Подошвенная часть обуви здоровой конечности может быть выполнена в виде плотноскладного фасонного ремня 53 (фиг. ), подпружиненного пружиной 54, ограниченного рантовым кожухом 55 и снабженного заборным обратным клапаном 56 для всасывания воздуха из атмосферы и выпускным каналом 57, связанным или непосредственно с линией 45 нагнетания, или с пневмогидроаккумулятором 20.
Сигнализатор с ртутными выключателями включает в качестве дополнительного средства сообщения о падении колбу 58 (фиг. 10), устанавливаемую на верхней части туловища инвалида перпендикулярно к колбе 37 (например, на спине), а также содержит импульсный прибор 59, например, с мгновенно разряжающимся конденсатором малой емкости от источника 60 питания, реле 61 и 62, оперативные контакты 63 и 64 которых соответственно связаны с электродными парами 65 и 66 для колб 37 и 58, общий контакт 67 которых связан с импульсным прибором 59.
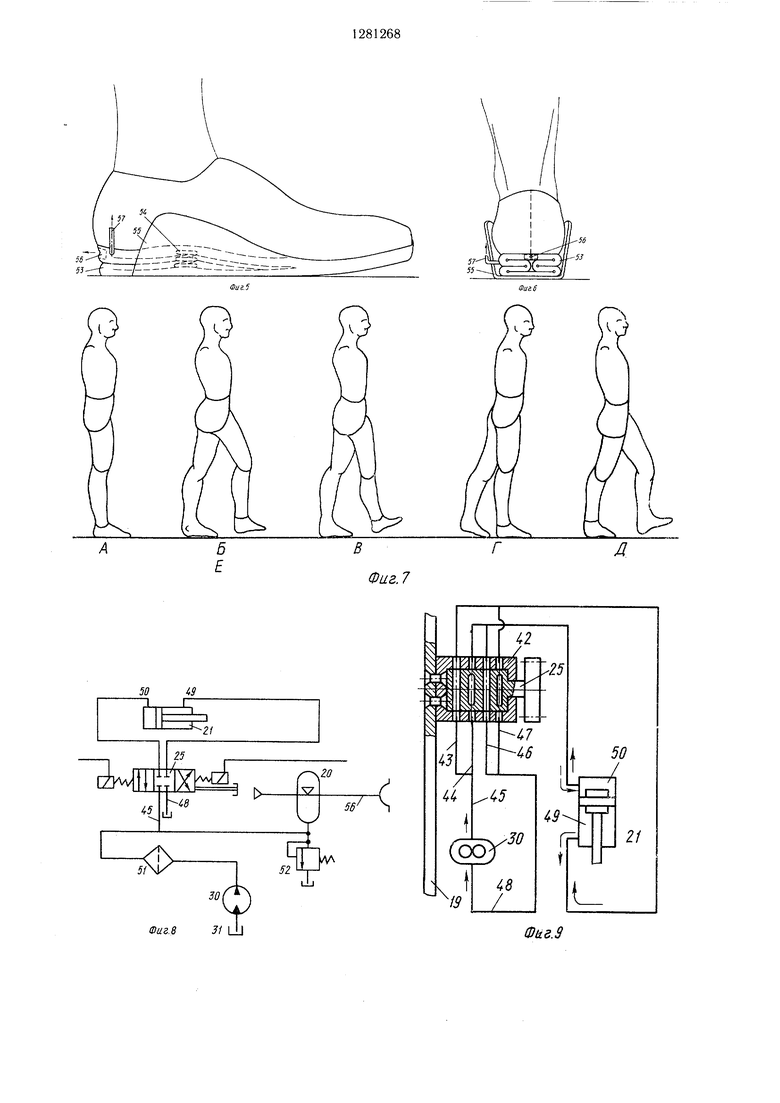
Протез нижней конечности по второму варианту помимо общих с первым вариантом элементов, обозначенных позициями 1 -18 и 54-67 содержит взамен остальных узел в виде подвижного валика 68, заводящего спиральные пружины негаторов, симметрично размещенных внутри барабана 69, снабженного рычагом-толкателем 70, свободный конец которого выполнен в виде огибающего якорь 71 электромагнита упора 72. При этом электродвигатель 73 конструктивно объединен с редуцирующими скорость в.ращения двухступенчатыми червяч ными парами 74 и 75, колесо последней из которых наглухо посажено впереди звездочки муфты 76 обгона на валике 68, а поверх ее обоймы выполненный заодно целое с барабаном 69 , закреплены внутренние концы пружин всех негаторов (фиг. 11 - 13).
Весь механизм смонтирован на разветвленном остове - держателе 77, также соединенном с полукорсетом 10 и по своему назначению выполняющем ту же роль, что и поворотная щина 19 в первом электрогидравлическом варианте.
В электрической цепи электромагнита 24 (или 71) установлено защитное реле 78 (КЗ) с нормально замкнутым контактом 79, а в цепи электродвигателя 29 (или 73) установлен выключатель 80 (S5) кнопочный без самовозврата, нажимной с возвратом посредством вторичного нажатия кнопки.
Подготовительный этап состоит в следующем.
По вывороченному негативу, снятому с бедра сохранивщейся конечности, получают позитив утраченного бедра, по которому изготавливают гильзу 12, которую устанавливают на дуговую подвижную опору 13. с трением качения, с возможно- 5 стью перемещения в сагиттальной плоскости относительно полукорсета 10. В последнем вырезается противолобковая часть, которая обычно прикрыта удлиненньгм кпереди участком дуги подвижной опоры 13, рассчитанной для перемещения гильзы 12
относительно полукорсета 10 вперед при сидении, который при надобности может быть повернут вниз вокруг щарнирной оси, полукорсет 10 сзади может быть выполнен с поворотной створкой.
5 Неподвижную ось 14, на которой устанавливают двухветвийную пружину 28 кручения, насаживаемую на втулку-фланец 17 и поворотную щину 19, прикрепляемую гайкой 16, фиксируемую при ходьбе и стоянии посредством рукоятки 26 вилкой 18 и осво0 бождаемую при сидении, жестко монтируют на полукорсете 10 на продолжении геометрической оси, мысленно проводимой от ямки вертлужной впадины безымянной кости протезируемого в положении, направ, ленном кзади в пределах 25 и книзу в пределах 15°.
После установки искусственной стопы 1 на сферическом щарнире 2 посредством прорезиненных пластин 3 голеностопного узла с трубчатой гильзой 4 колени регу0 лируют натяжение эластичных тяг пространственной установкой фиксирующих элементов 8. Под пластинами 3 соответственно располагают датчики 22 (S1) и 23 (S2) положения стопы, представляющие собой нормально разомкнутые концевые выключа5 тели, периодически замыкаемые в фазы ща- га.
Протез нижней конечности (по первому и второму вариантам) работает следующим образом.
Ходьба на протезе нижней конечности
начинается включения кнопки 80 (S5), при этом инвалид, опираясь на трость (для страховки в первые дни и недели адаптации к протезу), должен сместить центр тяжести тела вперед - немного качнуться.
c При заднем то.ччке цепь электромагнита 24 (Y) (или 71) включается концевиком 23 (S2). При стоянии последовательно замыкается и концевик 22 (S1), и только в этом случае, подключается защитное реле 78 (КЗ) оперативный нормально зам0 кнутый контакт 79 (КЗ) которого размыкает цепь электромагнита 24 (U) (или 71) для предотвращения произвольного освобождения заряженной пружины 28 (или 69 по второму варианту), подбрасывающих гильзу 12 бедра. При сидении электросхемы
управления протезируемый обесточивает. Источник 60 электропитания может быть размещен на поясе 11 протезируемого. Сигнализатор с ртутными выключателями 37 и
58 при этом может срабатывать при уверенном стоянии на стопе, но только при появлении преобладающего сигнала от одного из них, способного автоматически сообщать о возможном падении.
Винтовая пружина 28 кручения постепенно закручивается в пределах 120° с момента включения электросхемы управления кнопкой 80 (S5) электродвигателей 29 насоса 30, нагнетательная линия 45 которого сообщается посредством отводов 43 и 44 через зубчатый шток - распределитель 25 с оппозитными полостями 49 и 50 гидроцилиндра 21, как и линия 48 отсоса, посредством отводов 46 и 47 сообщается с полостями гидроцилиндра - только в обратном порядке. При этом шток 25 гидроцилиндра 2 посредством блочной тяги 33 увлекает за собой конец задней ветви пружины 28 до тех пор, пока взаимодействующая со штоком - распределителем 25 дуга 32 зубчатого зацепления, жестко связанная с близлежащей частью к витку пружины 28 кручения, не изменит свое направление.
Момент включения электромагнита 24 для выбороса противоположной ветвью пружины 28 гильзы 12 бедра вперед на угол до 30° по первому (электропневмогидравличе- скому) варианту или рычагом-толкателем 70 возвратного барабана 69 заведенной спиральной пружины по второму (электромеханическому варианту наступает при заднем толчке, после срабатывания концевого выключателя 23, а момент пуска электродвигателя 29 насоса (в электропневмогид- равлическом варианте) или электродвигателя 73 (в электромеханическом варианте) возможен только при стоянии на искусственной стопе, т.е. при срабатывании обоих концевых выключателей 22 и 23.
Спиральные ленточные пружины негато- ров заводятся на валике 68 от выходной червячной пары 75 через муфту 76 обгона. При использовании указанного электродвигателя передаточное отношение выходной пары 75 и первой ступени 74 может быть одинаковое и равняться 30.
Пружины в барабане 69 могут быть вложены желобчатыми. Для получения наибольшего момента при спуске желобчатую ленту вставляют в барабан выпуклой стороной к валику. При этом радиус перескока желобчатой ленты должен быть значительно больше внутреннего радиуса барабана. Для увеличения выходной мощности барабана 69 его можно выполнить в виде, например, шестибарабанного нега- торного двигателя типа В. момент силы которого равен сумме всех моментов от каждого из шести радиально расположенных негаторов, связанных с расположенным в центре большим барабаном, на котором пружинные ленты от них наматываются одновременно.
Пример подбора характеристик с определением передаточных отношений привода в предлагаемом протезе приведен по поверочным данным к следующим электромеха- нической и электропневмогидравлической расчетным схемам
После определения момента нагрузки
Мн Р„р 1ст 300 кгс см 300.000 гс см,
0 где Рпр 6 кгс-сила тяжести протеза; см - статический радиус протеза
до коленного шарнира;
и определения времени выноса бедра tc с± rii 0,5 с при его подъеме на угол , а также номинальный момент нагрузки М 300 г см по отношению к моменту двигателей нормального исполнения при тех же номинальных напряжений питания U 12 В и скорости вращения п 9000 об/мин.
С определением передаточного отноше- 0 ния двухступенчатого червячного редуктора
ip 900 с числом оборотов выход5
tlBblX
ного вала последнего пвых
i5
0
0
5
0
об/с 1 О/мин
В качестве быстродействующего электромагнита с временем включения 0,,05 с могут быть использованы, например, ЭПБ 2006 УЧ, ЭПБ 40 10 УЧ, с номинальным тяговым усилием 6 - 30 Я, при номинальном ходе якоря 3-9 мм, допускающие число включений в час соответственно 24000 и 3600.
К пневмогидравлическому расчету системы по первому варианту с учетом исходных условий (угол поворота протеза а 30°) уравнения равновесия цилиндра (абсолютное) выражается формулой
Р p,,pFu Lu I j + mg IcT sina
где P - сила со стороны цилиндра;
Fu - площадь цилиндра;
Lu - плечо приложения силы со тороны гидроцилиндра;
I - момент инерции протеза; кгс - масса протеза; ,81 м/с - ускорение свободного паде- неия;
1 - координата центра тяжести протеза.
При этом момент инерции протеза 1 m г где г 0,4 м - расстояние центра тяжести от шарнира.
Таким образом, 1 0,96 кг м, средняя угловая скорость
а
)
t
0,55
0,95 (1/с)
(At - время срабатывания цилиндра). Минимальное угловое ускорение
OCct
/da NoCt
)min- д
3,44(1/с Минимальный инерционный момент
Ммин I (- ),,„„ 3,3 КГ М
Весовой момент
д весов , sina 29,4 Н м;
Работа, совершаемая за один ход поршня А Р Lu ( Р„ F,.) Ьц 32,7 Н м;
р р рц 130,8 Ни 13,1 кгс;
Lu 25 см; РП - избыточное давление в системе.
Потребляемая мош,ность Ычотр -
(М Р +M ™ )s 30,1 Вт.
«it
Геометрический расчет гидроцилиндра. Пусть Ри 1, тогда плошадь цилиндра равна Fu-g-- 13,1 см,
D V
УЦ F Н (где Н - ход поршня в цилинд- ре);
Н Lu 51памакс 12,5 см;
Vu 163,75 см Задаваемое давление подзарядки Pi
--Р„ 1 КГС/СМ.
Максимальное давление Рг 1,5 кгс/см Обозначая Vi - объем газовой полости аккумулятора при разряжении; V2 - объем газа при Р Р 1,5 кгс/см, то
Vi-Уа Р2-Р|
-vT ь
V, P, V2P2,
-t
2 (V1 У2 Уч линдра);
Vi« 500 см Средний расход насосов
Qcp о , 6600
2с п п -об/мин эл.дв.; Ло -0,8-1;
Qcp
0,5 см за оборот;
где q - рабочий объем одного насоса.
Таким образом, предлагаемое устройство по обоим вариантам обеспечивает своевременный вынос гильзы бедра в фазах шага за счет внешнего источника энергии, преобразование силы тяжести тела для облегчения заднего толчка и управления выно
сом гильзы бедра, а также автоматическое своевременное сообш,ение и управление пере- мешением центра тяжести тела в случае возможного падения.
5Формула изобретения
1.Протез нижней конечности, содержащий искусственную стопу с голеностопным шарниром, гильзы голени и бедра, соединен0 ные коленным шарниром, полукорсет с элементами крепления, тазобедренный шарнир, соединенный с полукорсетом посредством дуговой,направляющей, электродвигатель и пружинный аккумулятор,огличаюгг ийся тем, что, с целью облегчения ходьбы для инва5 лидов с вычлененным бедром, протез дополнительно содержит поворотную шину с фиксатором ее положения относительно закрепленной на полукорсете оси, установленный на которой пружинный аккумулятор выполнен в виде двухветвийной пружины кручения, спаренные гидроцилиндры с газовой полостью, гидрораспределитель и электромагнит, закрепленные на поворотной шине, насос со спаренными электродвигателями и гидробаком, размещенные на дне гильзы
5 бедра ниже концов двухветвийной пружины кручения, при этом передняя нижняя часть ее выполнена в виде дуги для обхвата сердечника электромагнита, а задняя нижняя часть - в виде блочной тяги, связанной с поршнями гидроцнлиндров, верхняя
0 часть задней ветви пружины снабжена зубчатым сектором, взаимодействующим с распределителем потоков, соединенным поочередно с оппозитными полостями гидроцилиндров и гидробака, а также размещенный на полукорсете пояс с сигнализатором, источником питания и электросхемой управления, связанной с дат-чиками положения стопы, размещенными на переднем и заднем буферах голеностопного узла протеза.
2.Протез по п. 1, отличающийся тем, что, с целью использования массы вышележащего отдела тела инвалида для управления выносом гильзы бедра во время опоры на всю стопу сохранившейся конечности, подошвенная часть обуви сохранившейся конечности выполнена с подвижной рабочей частью в виде механического насоса с обратным клапаном и состоит из складного подпружиненного фасонного ремня, выходное отверстие которого сообщено со вспомогательной линией среды нагнетания газовой полости.
3.Протез нижней конечности, содержащий искусственную стопу с голеностопным шарниром, гильзы голени и бедра, соединенные коленным шарниром, полукорсет с элементами крепления, тазобедренный шарнир, соединенный с полукорсетом посредством дуговой направляющей, электродвигатель и пружинный аккумулятор, отличающийся тем, что, с целью облегчения ходь5
0
5
0
бы для инвалидов с вычлененным бедром, протез дополнительно содержит поворотную шину с фиксатором ее положения относительно закрепленной на полукорсете оси, установленный на которой пружинный аккумулятор выполнен в виде многобарабанного негаторного двигателя, центральный барабан которого снабжен рычажным толкателем и соединен с электродвигателем и редуктором посредством механизма свободного хода, нижняя часть рычажного толкателя выполнена в виде дуги, обхватывающей сердечник электромагнита, оси негатороБ жестко смонтированы на поворотной шине, а также размещенный на полукорсете пояс с сигнализатором, источником питания и электросхемой управления, связанной с датчиками положения стопы, размещенными на переднем и заднем буферах голеностопного узла протеза.
/ / М
М
26
Фиг2
20 26
35
Фиг.
Фиг. 5
Фигб
Б
Е
Фиг.831 Ш
В
Г
Д
Фиг.7
Фыг.З
Фиг.Ю
15
75
SS
73
68
77
rj
ФтН
В ид A
73
71 71
11
Фаг.13
W//////////////
В
г
y/////////Z Z/7/)
70
Гсдтк
юи.
J
N4
ьц
-4
Л
69
Фи.г.1Ч
76
Фи 8.15

| название | год | авторы | номер документа |
|---|---|---|---|
| Протез после вычленения бедра | 1985 |
|
SU1296148A1 |
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| Протез бедра | 1982 |
|
SU1074522A1 |
| Протез нижней конечности | 1982 |
|
SU1026802A1 |
| Протез после вычленения бедра | 1982 |
|
SU1088720A1 |
| Протез после вычленения бедра | 1981 |
|
SU978850A1 |
| Тазобедренный узел протеза после вычленения бедра | 1988 |
|
SU1532024A1 |
| Протез нижней конечности | 1985 |
|
SU1292762A1 |
| Протез после вычленения бедра | 1986 |
|
SU1404072A1 |
| Тазобедренный узел протеза при вычленении бедра | 1984 |
|
SU1569006A1 |




Изобретение относится к протезам нижних конечностей и предназначено для инвалидов, перенестчих операцию вычленения бед- ра. Цель изобретения - облегчение ходьбы. Протез содержит искусственную стопу 1 с шарниром 2, гильзы голени 4 и бедра 12, шарнир 9, пояс 11, полукорсет 10, шарнир 13, пружинный аккумулятор, поворотную шину 19 с фиксатором, датчики 22 и 23 положения стопы, сигнализатор 37 и 38 возможного I падения. Пружинный аккумулятор может быть выполнен в виде двухветвийной пружины 28 крепления, взаимодействующей с системой электропневмогидравлического привода протеза. В подошвенной части обуви здоровой ноги может быть размеш,ен заборный из атмосферы и выпускной клапаны. Пружинный аккумулятор может быть выполнен в виде многобарабанного негаторно- го двигателя, соединенного с системой электромеханического привода протеза. Введение новых элементов и образование новых связей между элементами устройства позволяет обеспечить своевременный вынос гильзы бедра 12 в фазах шага за счет внешнего источника энергии, преобразование силы тяжести тела для облегчения заднего толчка и управления выносом гильзы бедра, а также сообш,ение и управление перемещением центра тяжести тела в случае возможного падения, 2 с. и 1 з.п.ф-лы, 16 ил. i (Л ьо 00 ю о 00
Составитель Л. Пластинин
Редактор И. ШуллаТехред И. ВересКорректор С. Черни
Заказ 7153/5Тираж 594Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
